运筹学第六章 运筹学 动态规划
第6章-动态规划
求解过程
由最后一个阶段的优化开始,按逆向顺序逐步 向前一阶段扩展,并将后一阶段的优化结果带 到扩展后的阶段中去,以此逐步向前推进,直 至得到全过程的优化结果。
f1
(
A)
min
dd11
( (
A, A,
B1) B2 )
ff22((BB12))
min
4 9
9 11
13
d1( A, B3) f2 (B3)
5 13
其最短路线是A→ B1→C2 →D2 →E ,相应的决 策变量是u1(A)=B1
因此,最优策略序列是:
u1(A) =B1, u2(B1)=C2, u3(C2)=D2, u4(D2)=E
5 8 C2 4 6 4
4 C3 2
C3
D1 4 2 6
D2 9 7
D3 5
D4
E1 1 F
E2 2
E5
F
动态规划的逆序解法与顺序解法
逆序(递推)解法:即由最后一段到第一段逐步 求出各点到终点的最短路线,最后求出A点到E点 的最短路线。运用逆序递推方法的好处是可以始 终盯住目标,不致脱离最终目标。 顺序解法:其寻优方向与过程的行进方向相同, 求解时是从第一段开始计算逐段向后推进,计算 后一阶段时要用到前一段求优的结果,最后一段 的计算结果就是全过程的最优结果。
B1
A
4+9=13
d(u1)+f2
B2
B3
f1(s1) u1*
运筹学课件 第六章 动态规划
求解规划问题可从最终阶段逐步推至最初阶段或从 最初阶段逐步推至最终阶段,我们称前者为逆序解 法,称后者为顺序解法。
动态规划的基本方程(逆序法):
fk (sk) = opt { wk(sk,uk )⊙ f k+1(sk+1) }
fn+1(sn+1) = φ(sn+1) f k ( sk) — 从第k阶段状态sk到终点的最优效益值
fk (sk+1)=max { vk(xk ) + f k-1(sk) }
f0(x1)=0
0
0
0
0
0
17 14
1
0
3
14
4
01
5
15
01
8
12
7
11
4
8
5
0 10 2 0
20
29
4
4
7
13
7
5
11
8
6
16 3 0
4
30
5
3
0 18
40
40
4
连续型动态规划问题的求解
例:某公司有资金10万元,若投资于项目i的投资额 为xi(i = 1 , 2 , 3)时,其收益分别为 g 1(x1)=2 x12, g 2 ( x 2 ) = 9 x2 , g 3 ( x 3 ) = 4 x3, 问应如何分配投资
第六章 动态规划
6.1 引言 6.2 最优化原理及基本概念 6.3 应用举例
例 6.1
多阶段决策过程最优化
多阶段决策过程,是指一类特殊的过程,它们可以按 时间顺序分解成若干个相互联系的阶段,称为“时段”, 在每个时段都要做决策,全部过程的决策是一个决策序列。 多阶段决策问题也称为序贯决策问题。
电力出版社运筹学答案 第六章
顺推法::设状态变量 表示第 年初拥有的资金数,则有顺推关系式
工作
人
1
2
3
4
1
2
3
4
15
19
26
19
18
23
18
21
21
22
16
23
24
18
19
17
10.已知某指派问题的有关数据(每人完成各项工作的时间)如右表所示,试对此问题用动态归划方法求解。要求:(1)列出动态规划的基本方程;
1个销售点,在第三个地区设置1个销售点。每月可获总利润为47。
12.某工厂购进100台机器,准备生产 两种产品。若生产产品 ,每台机器每年可收入45万元,损坏率为65%;若生产产品 ,每台机器每年收入为35万元,但损坏率只有35%;估计三年后将有新的机器出现,旧的机器将全部淘汰。试问每年应如何安排生产使在三年内收入最多?
15.最优方案为(A,B2,C1,D1,E)或(A,B3,C1,D1,E)或(A,B3,C2,D2,E);总费用是11。
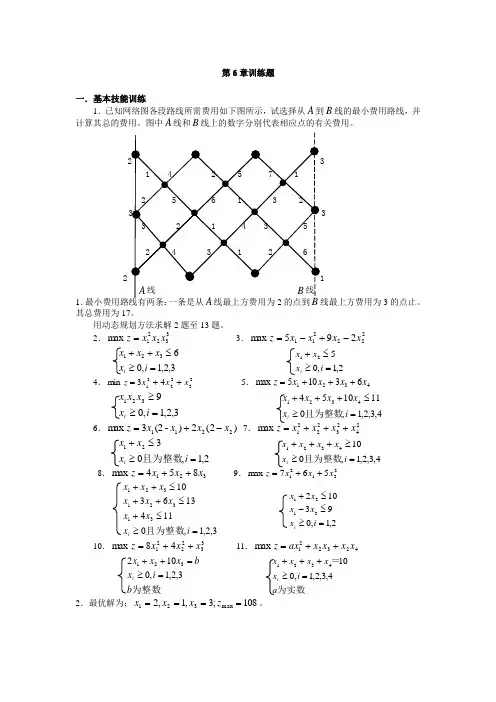
16.最短路线问题:从起点A到终点G分六个阶段,每个阶段各有若干条可选择的道路,每条道路的长度如图所示。试确定从A点到G点的最短路线。
16.A-B1-C2-D1-E2-F2-G总长度为18。
5.(设备更新问题)设某企业在今后4年内需使用一辆卡车。现有一辆已使用2年的旧车,根据统计资料分析,预计卡车的年收入、年维修费(包括油料等费)、一次更新重置费及4年后残值如右表所示,k=1,2,3,4。试确定4年中的最优更新计划,以使总利润最大。
i
0
1
2
3
4
5
运筹学教案动态规划
运筹学教案动态规划一、引言1.1 课程背景本课程旨在帮助学生掌握运筹学中的动态规划方法,培养学生解决实际问题的能力。
1.2 课程目标通过本课程的学习,学生将能够:(1)理解动态规划的基本概念和原理;(2)掌握动态规划解决问题的方法和步骤;(3)能够应用动态规划解决实际问题。
二、动态规划基本概念2.1 定义动态规划(Dynamic Programming,DP)是一种求解最优化问题的方法,它将复杂问题分解为简单子问题,并通过求解子问题的最优解来得到原问题的最优解。
2.2 特点(1)最优子结构:问题的最优解包含其子问题的最优解;(2)重叠子问题:问题中含有重复子问题;(3)无后效性:一旦某个给定子问题的解确定了,就不会再改变;(4)子问题划分:问题可以分解为若干个子问题,且子问题之间是相互独立的。
三、动态规划解决问题步骤3.1 定义状态状态是指某一阶段问题的一个描述,可以用一组变量来表示。
3.2 建立状态转移方程状态转移方程是描述从一个状态到另一个状态的转换关系。
3.3 确定边界条件边界条件是指初始状态和最终状态的取值。
3.4 求解最优解根据状态转移方程和边界条件,求解最优解。
四、动态规划应用实例4.1 0-1背包问题问题描述:给定n个物品,每个物品有一个重量和一个价值,背包的最大容量为W,如何选择装入背包的物品,使得背包内物品的总价值最大。
4.2 最长公共子序列问题描述:给定两个序列,求它们的最长公共子序列。
4.3 最短路径问题问题描述:给定一个加权无向图,求从源点到其他各顶点的最短路径。
5.1 动态规划的基本概念和原理5.2 动态规划解决问题的步骤5.3 动态规划在实际问题中的应用教学方法:本课程采用讲授、案例分析、上机实践相结合的教学方法,帮助学生深入理解和掌握动态规划方法。
教学评估:课程结束后,通过课堂讨论、上机考试等方式对学生的学习情况进行评估。
六、动态规划算法设计6.1 动态规划算法框架介绍动态规划算法的基本框架,包括状态定义、状态转移方程、边界条件、计算顺序等。
第6章:动态规划《运筹学》

fk
sk 1
min
uk Dk (sk )
d (sk , sk1)
fk1(sk )
(k 1,2,3,4)
k=0时,f0(s1)= f0(s)=0,这是边界条件。
k=1时,S2={A1,A2,A3} f1( A1) 8
A1
8
f1( A2 ) 6 f1( A3 ) 4 k=2时,S3={B1,B2,B3}
发,采取某种策略到第n阶段的终止状态时的效益,它与所选 取的策略有关,因此常记作:
Vk,n (sk ,uk , sk 1,, sn ,un ) (k 1,2,, n) 常用的指标函数的形式有各阶段指标函数的和的形式和积的 形式两种。
①和的形式
n
Vk,n (sk ,uk , sk 1,,un ) v j (s j ,u j ) vk (sk , uk ) Vk1,n (sk1 , uk1 ,, un )
uskk
Sk
sk
Dk
sk
k 1,2,,n
建立实际问题的动态规划模型一般可遵循以下步骤:
第一,按时间或空间顺序将多阶段决策问题划分为适当的 阶段;
第二,恰当选择状态变量sk,使它既能确切地描述过程的演 变,又满足过程的无后效性;
第三,确定决策变量uk 及每阶段的容许决策集Dk(sk)。状态 变量和决策变量可以是连续的,也可以是离散的;
在例6-4中,第一阶段有一个状态s,则S1={s};第二阶段的 状态有A1、A2、A3三个,则S2={A1,A2,A3};第三阶段的状态 也有B1、B2和B3三个,则S3={B1,B2,B3};第四阶段的状态有两 个,C1和C2,记为则S4={C1,C2}。
3.决策和策略 当各阶段的状态确
运筹学第六章 动态规划
f
3
(C
2
)
min
((CC22,,DD21
) )
f f
4 4
( (
D1 D2
) )
6 5
11
min
5
2
min
7
7
最优决策C2 D2
15
f3(C1)=8
2
A5
1
B1 12 14
10
6
B2 10
4 13
B3
12 11
C1
3
9
f3(C2)=7
6
C2
5 8
C3
10
f4(D1)=5
D1
5 f5(E)=0
B1 12 14
2 f2(B2)=110 4
6
5
B2 10
4
1
13
B3
12 11
f2(B3)=19
f3(C1)=8
C1
3
9
f3(C2)=7
6
C2
5 8
C3
10
f3(C3)=12
f4(D1)=5
D1
5 f5(E)=0
E
D2 2
f4(D2)=2
状态 最优决策 状态 最优决策 状态 最优决策 状态 最优决策 状态 A ( A,B2) B2 (B2,C1) C1
22
f1(A)=19
A
f2(B1)=21
B1 12 14
2 f2(B2)=110 4
6
5
B2 10
4
1
13
B3
12 11
f2(B3)=19
f3(C1)=8
C1
3
9
运筹学第六章 动态规划
第六章 动态规划主要内容:1、动态规划的基本概念2、动态规划的最优性原理和基本方程3、动态规划的模型及其应用重点与难点:动态规划的状态转移方程、基本方程;动态规划的建模思路与方法;运用递推原理确定最优解的方法与技巧。
要 求:理解动态规划的基本概念,掌握动态规划的建模步骤和求解方法,能够创造性地建立数学模型,并能运用动态规划方法解决实际问题。
§1 动态规划的基本概念例1 最短线路问题。
给定一个运输网络(如图),两点之间的数字表示两点间的距离,试求一条从A 0到A 4的运输线路,使总距离为最短?1、阶段对于一给定的多阶段过程,恰当地分为若干个相互联系的阶段,以便能按一定的次序去求解。
描述阶段的变量称为阶段变量,常用K 表示。
1)阶段数固定的问题称为定期多阶段决策问题;如例1,可分为四个阶段。
2)阶段数不固定的问题称为不定期多阶段决策问题。
如2、状态状态表示某阶段的出发位置。
它既是某阶段过程演变的起点,又是前一阶段决策的结果。
例1中,第一阶段有一种状态即A 0点,第二阶段有三个状态,即点集合{A 1,B 1,C 1},一般第K 阶段的状态就是第K 阶段所有始点的集合。
描述过程状态的变量称为状态变量。
第K 阶段的状态变量,记为k x 。
3、决策决策表示当过程处于某一阶段的某个状态时,可以作出不同的决定(或选择),从而确定下一阶段的状态,这种决A 0A 1B 1C 1A 2B 2C 2B 3A 3A 420 40 3070 5030 2040 40 1050 10 4060 3030 3030 40B ACDE4 724 2621 1定称为决策。
描述决策的变量称为决策变量,常用)(k k x u 表示处于状态k x 时的决策变量,它是状态变量的函数。
如: 21A B → , 记为()212A B U =决策变量可取值的全体,称为允许决策集合。
常用()k k x D 表示状态k x 的允许决策集合。
运筹学动态规划
特别注意:动态规划是求解某类问题的一种 方法,是考察问题的一种途径,而不是一种算法 (如线性规划是一种算法)。
因而,动态规划没有标准的数学表达式和明 确定义的一组规则,而必须对具体问题进行具体 分析处理.
动态规划
8.1 多阶段决策过程及实例 8.2 动态规划的基本概念和
基本方程 8.3 动态规划的最优性定理 8.4 动态规划与静态规划关系
综述
动态规划是运筹学的一个分支,是解决多 阶段决策过程最优化问题的一种数学方法。
该方法是由美国数学家贝尔曼(R.Bellman)等 人在本世纪50年代初提出的。
他们针对多阶段决策问题的特点,把多阶段 决策问题变换为一系列互相联系单阶段问题,然 后逐个加以解决。
1
2
3
始点
5
B1
6 3
A
4 B2 4 6
2
5
B3 6
C1
1 2
2
C2 2
3
C3
3
4 终点
D1 2
D2 3
E
4
D3
2、状态
5
B1
6 3
A 4 B246
25
B3 6
C1
1 2
2
C2 2
C3 3 3
D1 2
D2 3 E 4
D3
各个阶段开始时所处的自然状况和客观条件称为
状态,描述了研究问题过程的状况(称不可控因素).
一些与时间没有关系的静态规划(如线性 规划,非线性规划)问题,只要人为地引进 “时间”因素,也可把它视为多阶段决策问题, 用动态规划方法去处理。
运筹学动态规划
运筹学动态规划运筹学是一门综合运筹学、优化学、决策学和统计学等多学科知识的学科,它的核心内容是对决策问题进行建模和分析,并通过数学方法进行求解和优化。
动态规划是运筹学中的一种重要方法,它通过将问题划分为相互重叠的子问题,并通过解决子问题的最优解来求解原问题的最优解。
下面将详细介绍运筹学中的动态规划方法。
动态规划方法的核心思想是将原问题分解为若干个相互重叠的子问题,并通过求解子问题的最优解来求解原问题的最优解。
为了可以使用动态规划方法,必须满足以下两个条件:子问题的最优解可以作为原问题的最优解的一部分;子问题之间必须具有重叠性,即一个子问题可以被多次使用。
动态规划方法的具体步骤如下:首先,将原问题分解为若干个子问题,并定义出每个子问题的状态和状态转移方程;其次,通过迭代求解每个子问题的最优解,直到求解出原问题的最优解;最后,根据子问题的最优解和状态转移方程,得到原问题的最优解。
动态规划方法的应用非常广泛,可以用于求解各种各样的优化问题。
例如,在物流配送中,可以使用动态规划方法求解最短路径问题;在生产计划中,可以使用动态规划方法求解最优生产计划;在股票投资中,可以使用动态规划方法求解最优投资策略等。
动态规划方法的优点是可以通过求解子问题的最优解来求解原问题的最优解,避免了穷举法的复杂性。
此外,动态规划方法还可以通过引入一定的约束条件,来对问题进行更精确的建模和求解。
然而,动态规划方法也存在一些局限性。
首先,动态规划方法要求问题能够满足子问题的最优解可以作为原问题的最优解的一部分,这限制了动态规划方法的应用范围。
其次,动态规划方法通常需要建立较为复杂的状态转移方程,并进行复杂的计算,使得算法的实现和求解过程比较困难。
综上所述,动态规划是运筹学中的一种重要方法,通过将问题划分为相互重叠的子问题,并通过解决子问题的最优解来求解原问题的最优解。
动态规划方法的优点是可以高效地求解优化问题,但同时也存在一些局限性。
管理运筹学讲义:动态规划
谢家平 博士 副教授
研究领域:系统建模与优化、生产与运作管理、物流与供应链管理
讲授课程:管理运筹学、管理系统工程、生产运作管理、
供应链管理、国际物流管理、企业资源计划
单
位:上海财经大学国际工商管理学院供应链管理研究中心
E-mail:jiaping_xie@ 电 话:55036936(H)
若 V k ,n
v ( s , x ),过程指标等于各阶 边界条件:
n
f k (sk )
opt v
xk X k ( S k )
k
( s k , x k ) f k 1 ( s k 1 )
f n 1 ( s n 1 ) 0
SHUFE
第二节 动态规划原理
二、动态规划方法的基本思路
• 逆序算法:逆着阶段顺序的方向,由后向前推算。
把寻求最优策略看作连续递推过程,从最终阶段开始,逆着实 际过程的进展方向逐段求解; 在每一阶段求解过程中都是其后部子过程最优策略的基础上, 再考虑本阶段的指标函数,求出本阶段的最优策略; 直到第一阶段为止。
A1 11,A3 Q 2 4 3
8,B1 6 4 A2 2 4 8,B1 4 2 A3 5
阶段1 阶段2
C1 3
0 T
6
3 4,T C2 4
6,C1 3 B3 3
阶段3
阶段4
• 最短路径:Q→ A3→ B1→ C1→T
6
上海财经大学国际工商管理学院
SHUFE
第一节
多阶段决策问题
三、 多阶段决策的基本特征
上海财经大学国际工商管理学院
SHUFE
第二节 动态规划原理
• 指标函数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多阶段的决策问题 最优化原理与动态规划基本方程 离散确定型动态规划模型的求解 连续确定型动态规划模型的求解 一般数学规划模型的动态目的与要求:使学生学会利用多阶段问题 的决策思想处理一些简单的实际问题,并会用 WinQSB求解动态规划. 重点与难点:重点是离散型资源分配问题;难 点是动态规划建模和求解方法. 教学方法:从多阶段最短路引入基本概念和数 学模型,再讲解离散型DP和连续型DP. 思考题,讨论题,作业:本章习题. 参考资料:见前言. 学时分配:6学时.
sk 1 T (sk , xk (sk )),或sk 1 T (sk , xk ).
⒍指标函数(index function):指标函数是用来衡 量实现过程优劣的一种数量指标.它是从状态 sk 出发至过程最终,当采取某种策略时,按预定标准 得到的效益值,这个值既与 sk 有关,又与 sk 以 后所选取的策略有关,它是两者的函数,称为过程 指标函数,记为 Vk ,n (sk , xk , sk 1 , xk 1 ,, sn ). 特别地,仅第k阶段的指标函数,可记为 vk (sk , xk )
如果上面的过程进行了n个阶段,而且我们希望 选择 y, y1 , y2 ,, yn1 使n个阶段的总收入最大, 问题变为
maxg ( y ) h( x y ) g ( y1 ) h( x1 y ) g ( yn 1 ) h( xn 1 yn 1 ) 满足条件 x1 ay b( x y ) x2 ay1 b( x1 y1 ) xn 1 ayn 2 b( xn 2 yn 2 ) 0 y x 0 yi xi i 1,2, , n 1.
⒌ 目标:路长最短.
例2 资源分配问题
设有数量x的某种资源,将它投入两种生产A,B. 若以y投入生产A,剩下的x-y投入生产B,则收入 函数为g(y)+h(x-y),如果生产后可以回收再生 产,其回收率分别为0≤a,b≤1,则在第一阶段生 产后回收的总资源为 x1 ay b( x y), 再将 x1 投 入生产A,B,若以 y1, x1 y1 分别投入生产A,B则又 可得收入 g ( y1 ) h( x1 y1 ), 因此两阶段的总收入 为 g ( y) h( x y) g ( y1 ) h( x1 y1 ).
在例1中各阶段的状态变量集合如下:
s1 A
第一阶段状态变量
s1
第二阶段状态变量 s 2
s2 B1 , B2 , B3
第三阶段状态变量 s 3
第四阶段状态变量 s 4 终点E
s3 C1 , C2 , C3
s4 D1 , D2
E
注意:状态变量是动态规划中最关键的一个 参数,它既反映前面各阶段决策的结局,又是 本阶段作出决策的出发点,状态是动态规划 问题各阶段信息的传递点和结合点.
前言:动态规划是最优化的一个分支,它是解决多 阶段决策过程最优化的一种方法.动态规划的创 始人是美国数学家贝尔曼(R.Bellman).它在四十 年代后期和五十年代初期在美国兰德公司工作, 针对一些多阶段决策问题提出了解决这类问题 的最优化原理,并在1957年出版了动态规划的第 一本书《Dynamic programming》.在企业管理 方面,动态规划可以解决库存问题,资源分配问题, 设备更新问题,运输问题,生产过程最优控制问题. 它的弱点是,根据最优化原理建立的动态规划基 本方程,尚无统一的解法,而要根据其数学结构灵 活处理;此外,变量个数不能太多,否则计算量太 大,这称为维数问题.
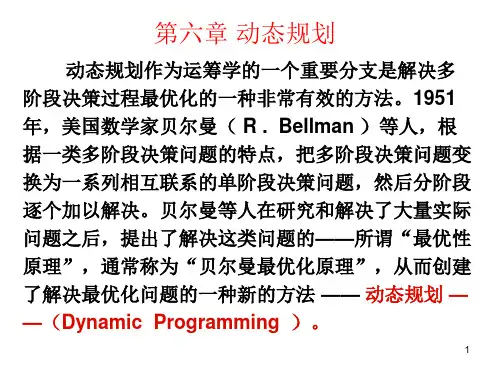
典型例题: 例1 多阶段网络的最短路
B1
2 10 6 6
12
14
C1
9
3
D1
5
A
5
B2
4 13
10
C2
5 8
E
D2
2
1
B3
状态1 状态2
12 11
C3
状态3
10
状态4
终点
阶段1
阶段2
阶段3
阶段4
例题特点:
⒈ 阶段:如图的阶段,分为四段; ⒉ 状态:顶点;
⒊ 决策:选弧; ⒋ 转移:从一个顶点走到另一个顶点;
第一节 多阶段决策问题及实例 所谓多阶段决策问题,是指一个大问题可以划 分为若干个阶段,每个阶段形成一个子问题,各 个阶段是互相联系的,每个阶段都要作出决策, 并且一个阶段的决策确定以后会影响下一阶段 的决策,从而影响整个过程的活动路线.各个阶 段所确定的决策构成一个决策序列,称为一个 策略,对于不同的策略其效果不同(效果可以用 数量来衡量).多阶段决策问题就是选择一个最 优策略,使在给定的标准下达到最好的效果.
例题特点: ⒈ 阶段:年(月) ⒉ 状态:资金数 ⒊ 决策:分配给A的资金数 yi ⒋ 转移: xn1 ayn2 b( xn2 yn2 ), n 1,2,, n 1. ⒌ 效益:n个阶段的总收入最大
第二节 最优化原理与动态规划基本方程 一. 动态规划的基本概念 ⒈阶段(stage):是指一个问题需要作出决策的 步骤,用k表示阶段数,k称为阶段变量.通常以 时间作为阶段变量. ⒉状态(state):状态表示在任一阶段所处的 位置,通常一个阶段有若干个状态,描述过程 状态的变量称为状态变量,第k阶段的状态变 量用 sk 表示.状态变量取值的全体称为状态 空间或状态集合.
x1 (s1 ), x2 (s2 ),, xn (sn ), 是n个阶段DP的一个策略.
xk (sk ), xk 1 (sk 1 ),xn (sn )是从k段起的子策略 .
⒌状态转移律:从 sk 的某一状态值出发,当决 策变量 xk (sk ) 的取值决定后,下一阶段状态变 量 sk 1 的取值也随之确定.这种从上一阶段的 某一状态值到下一阶段某一状态值的转移规 律称为状态转变移律.可表示为
⒊决策(decision):决策是指某阶段状态给定后, 从该阶段演变到下一阶段某状态的选择.决策 变量 xk (sk ) 表示第k阶段状态为 sk 时对方案的 选择. Dk (sk ) 表示k阶段状态为 sk 时决策允许 的取值集合.例如:例1中 D2 ( B1 ) C1 , C2 , C3 . ⒋策略(policy)和子策略(subpolicy):动态规划 问题各阶段决策组成的序列总体称为一个策 略.