4.2 伯德图法设计
如何绘制伯德图
0 -1 -2 -3 -4 Thursday, January 09, 1 20141
10T 5T 1 2T 1 T 2 T 5 T 10 T
-0.2 0.04 0 0 -0.2 0.04
-1 0 -1
-3 -7 -14.2 -20.04 0 -6 -14 -0.2 -20 -0.04
0.1
A( )
0.2 0.5
0.707
T
Thursday, January 09, 2014
11
振荡环节的波德图
L( ) 20 ( dB )
10
0.1 0.2 0.3 0.5 0.7 1 .0
16 12 8 4 0
(1 T 2 2 ) 2 ( 2 T ) 2
0 ,A(0 )
1 L , (0 ) 20 lg 2 。 2
因此在转折频率附近的渐近线依不同阻尼系数与实际曲线可能 有很大的误差。 Thursday, January 09, 10
2014
幅值 A( )与 T 的关系:
纯微分环节的波德图
① 纯微分: 20 A( ) L( ) 20 log A( ) 20 log 0 0.1 20 ( )
2
L( )(dB)
20dB / dec
微分环节
(rad / s )
1
10 20dB / dec
积分环节
( )(deg)
K 0
log
相频特性: ( ) K 0
2
积分环节的Bode图
K ⒉ 积分环节的频率特性:G( s) s K K K j e 2 频率特性: G ( j ) j K K A( ) ( ) tg 1 ( 0) 2 K L( ) 20 log A( ) 20 log L( ) / dB
单位负反馈系统校正——自动控制原理课程设计
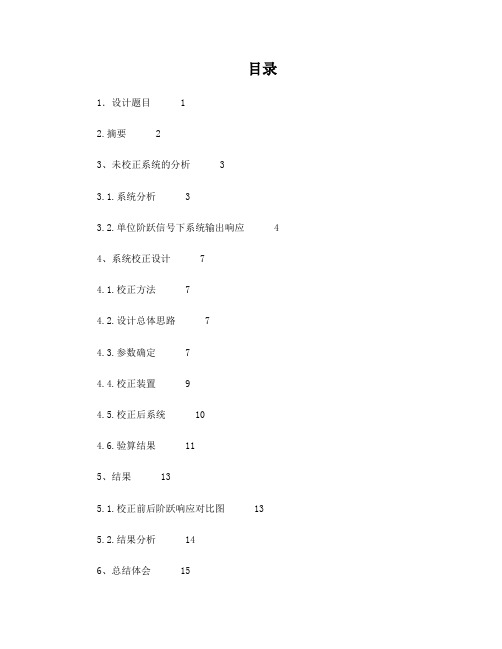
目录1.设计题目...................................................................... 错误!未定义书签。
2. 摘要 (2)3、未校正系统的分析 (3)3.1.系统分析 (3)3.2.单位阶跃信号下系统输出响应 (4)4、系统校正设计 (7)4.1.校正方法 (7)4.2.设计总体思路 (7)4.3.参数确定 (8)4.4.校正装置 (9)4.5.校正后系统 (10)4.6.验算结果 (11)5、结果 (13)5.1.校正前后阶跃响应对比图 (13)5.2.结果分析 (14)6、总结体会 (15)7、参考文献 (16)1.设计题目设单位负反馈系统的开环传递函数为:))101.0)(1(/()(++=sssKsG用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:1)相角裕度45≥γ;2)在单位斜坡输入下的稳态误差为0625.0≥sse;3)系统的穿越频率大于2rad/s。
要求:1)分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后- 超前校正);2)详细设计(包括的图形有:校正结构图,校正前系统的Bode图,校正装置的Bode图,校正后系统的Bode图);3)用Matlab编程代码及运行结果(包括图形、运算结果);4)校正前后系统的单位阶跃响应图。
2.摘要用频率法对系统进行超前校正的实质是将超前网络的最大超前角补在校正后系统开环频率特性的截止频率处,提高校正后系统的相角裕度和截止频率,从而改善系统的动态性能。
为此,要求校正网络的最大相位超前角出现在系统的截止频率处。
只要正确地将超前网络的交接频率1/aT和1/T设置在待校正系统截止频率Wc的两边,就可以使已校正系统的截止频率Wc和相裕量满足性能指标要求,从而改善系统的动态性能。
串联超前校正主要是对未校正系统在中频段的频率特性进行校正。
确保校正后系统中频段斜率等于-20dB/dec,使系统具有45°~60°的相角裕量。
如何绘制伯德图PPT课件
G( j ) 00
(5-63) (5-64)
100 00
900 1800
10 100 1000
图5-11 放大环节的Bode图
如图5-11所示,它是一条与角频率ω无关且与ω轴重合的直线。
5
(二)积分环节 积分环节的频率特性是
G( j) 1 j 1 1 e j90 j
7
当有n个积分环节串联时,即
dB L()
G(
j
)
(
1
j
)n
其对数幅频特性为
20 lg
G(
j )
20 lg
1
பைடு நூலகம்n
40
( 5-70 )
0
(5-71)
0.01 0.1
40 dB / dec
1
10
n 20 lg
G( j ) n 900
(5-72) 度 ()
6
设 ' 10 ,则有
20lg ' 20lg 10 20 20lg
dB L()
可见,其对数幅频特性是一条在
60
(5-68)
ω =1(弧度/秒)处穿过零分贝线 (ω 轴),且以每增加十倍频降 低20分贝的速度(-20dB/dec ) 变化的直线。
40
20dB / dec
1
L() dB
如何绘制伯德图PPT课件
是一条斜率为-n×20dB/dec,且在 00
ω =1(弧度/秒)处过零分贝线(ω
0.01 0.1
1
轴)的直线。相频特性是一条与ω 900
无关,值为-n×900且与ω 轴平行的 1800 直线。两个积分环节串联的Bode图
如图5-13所示。
图5-13 两个积分环节串联的Bode图
8
(三) 惯性环节
1
L() dB
40
20
0
0.01 0.1
1
-20
-40
( )
90o
45o
0
0.01 0.1
1
-45o
-90o
10
100
10
100
2
用伯德图分析系统有如下优点: (1) 将幅频特性和相频特性分别作图,使系统(或环
节) 的幅值和相角与频率之间的关系更加清晰;
(2) 幅值用分贝数表示,可将串联环节的幅值相乘变为相 加运算,可简化计算;
一阶微分环节的对数幅频特性如图5-16所示,渐近线的转折频
率 为1,转折频率处渐近特性与精确特性的误差为
,
其误20差lg 均2为正3d分B 贝数,误差范围与惯性环节类似。
相频特性是
当 时, G( j ); arctg
(5-78)
0 G( j0) 00
12
当 1 时,G( j 1) 450 ;
成的折线称为对数幅频特性的渐近线。如图5-14所示。
9
惯性环节的相频特性为
G( j ) arctgT (5-75)
当 0时,G( j0) 00;
当 1 时,G( j 1 ) 450;
如何绘制伯德图.ppt
j?
??
其幅频特性为
1
G ( j? ) ? ?
对数幅频特性是
(5-65) (5-66)
1
20 lg G ( j? ) ? 20 lg ? ? 20 lg ? ?
(5-67)
当 ? ? 0 . 1 时,20 lg G ( j 0 . 1 ) ? ? 20 lg 0 . 1 ? 20 ( dB ) ; 当 ? ? 1 时,20 lg G ( j1) ? ? 20 lg 1 ? 0 ( dB ) ;
当 ? ? 10 时,20 lg G ( j10 ) ? ? 20 lg 10 ? ? 20 ( dB ) 。
6
设 ? ' ? 10 ? ,则有
? 20 lg ? ' ? ? 20 lg 10 ? ? ? 20 ? 20 lg ?
可见,其对数幅频特性是一条 在
dB L(? )
60
(5-68)
ω =1(弧度/秒)处穿过零分贝线
(5-73) (5-74)
? ? 20 lg 1 ? T 2? 2
当 ? ?? 1 时, 20 lg G ( j ? ) ? ? 20 lg 1 ? T 2 ? 2 ? 0 ( dB ) ,
T
当 ? ?? 1 时,20 lg G ( j ? ) ? ? 20 lg 1 ? T 2 ? 2 ? ? 20 lg T ? ( dB )
40
(ω 轴),且以每增加十倍频降
20
? 20 dB / dec
低20分贝的速度( -20dB/dec )
0
0.01
0.1
1
10
?
变化的直线。
? 20
积分环节的相频特性是
? G ( j ? ) ? ? 90 0
如何绘制伯德图
。
6
设 ' 10 ,则有
20 lg 20 lg 10 20 20 lg
'
(5-68)
dB L( )
可见,其对数幅频特性是一条在 ω =1(弧度/秒)处穿过零分贝线 ( ω 轴),且以每增加十倍频降 低 20 分贝的速度( -20dB/dec ) 变化的直线。 积分环节的相频特性是
对数幅频特性为
20 lg G( j ) 20 lg K
(5-61)
当K>1时,20lgK>0,位于横轴上方;
当K=1时,20lgK=0,与横轴重合;
当K<1时,20lgK<0,位于横轴下方。
4
放大环节的对数幅频特性如图5-11所示,它是一条与角频 率ω 无关且平行于横轴的直线,其纵坐 标为20lgK。
0
100
1000
(5-63)
180
0
放大环节的相频特性是
G( j ) 0
0
图5-11 放大环节的Bode图
(5-64) 如图5-11所示,它是一条与角频率ω无关且与ω轴重合的直线。
5
(二)积分环节 积分环节的频率特性是
G ( j ) 1 j j 1
1
e
j 90
2 2 2
(5-85)
相频特性是
G ( j ) arctg 2 1
2 2
dB
40
(5-86)20
0
1 1 10
0
精确特性
40dB / dec
二阶微分环节与振荡节的Bode
1
图关于ω 轴对称,如图5-21 。
频率响应法(伯德图法)
1.5 13db
15
9.计算T1,近似计算公式如下:
T1 = 1
ωT 1
50 40 30 20 10 0 -10 -20 -30 -40 -50 -1 10 -10lg(a)=-5.1313
10
0
101ຫໍສະໝຸດ 102串联相位超前校正步骤
5. 该频率ωm就是校正后系统的开环截止频率ωc wc=wm; 6.然后用下式求出T
.
T=
1
ωm a
T=1/sqrt(alpha)/wc; %计算T alphaT= alpha*T; %计算αT 7.得到校正环节的传递函数 %为补偿超前校正造成的幅值衰减,原开环系统增益 要增加,使得K1*α=1. 8.绘制校正后的系统伯德图,验证所得系统的相位裕度 是否满足设计要求,如不满足重新计算。
因为要保证已校正系统的截止频率为上一步所 选的ωc值,就必须使滞后网络的衰减量20lgβ在 数值上等于未校正系统在新截止频率ωc上的对数 幅频值L’(ωc),该值在未校正系统的对数幅频曲线 上可以查出,于是,可以算出β值。见上页红圈
串联相位滞后串联相位滞后-超前校正步骤
1.根据稳态误差的要求,确定开环增益K。 2.根据所确定的开环增益K,画出未校正系统 的波特图,计算未校正系统的相位裕度γ [Gm,Pm, Wcg , Wcp]=margin(mag,phase,w); %计算校正前的相角裕度 Bode Diagram
0
-20
-40 -90 -135 -180 -225 -270 10
-1
10
0
10
1
Frequency (rad/sec)
串联相位滞后串联相位滞后-超前校正步骤
8.计算超前部分的零点转角频率ωT1≈0.7s-1,近似计算 公式如下:
单位负反馈系统校正——自动控制原理课程设计
目录1.设计题目 12.摘要 23、未校正系统的分析 33.1.系统分析 33.2.单位阶跃信号下系统输出响应 44、系统校正设计 74.1.校正方法 74.2.设计总体思路 74.3.参数确定 74.4.校正装置 94.5.校正后系统 104.6.验算结果 115、结果 135.1.校正前后阶跃响应对比图 135.2.结果分析 146、总结体会 157、参考文献 161.设计题目设单位负反馈系统的开环传递函数为:用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:1)相角裕度;2)在单位斜坡输入下的稳态误差为;3)系统的穿越频率大于2rad/s。
要求:1)分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正);2)详细设计(包括的图形有:校正结构图,校正前系统的Bode图,校正装置的Bode图,校正后系统的Bode图);3)用Matlab编程代码及运行结果(包括图形、运算结果);4)校正前后系统的单位阶跃响应图。
2.摘要用频率法对系统进行超前校正的实质是将超前网络的最大超前角补在校正后系统开环频率特性的截止频率处,提高校正后系统的相角裕度和截止频率,从而改善系统的动态性能。
为此,要求校正网络的最大相位超前角出现在系统的截止频率处。
只要正确地将超前网络的交接频率1/aT和1/T设置在待校正系统截止频率Wc 的两边,就可以使已校正系统的截止频率Wc和相裕量满足性能指标要求,从而改善系统的动态性能。
串联超前校正主要是对未校正系统在中频段的频率特性进行校正。
确保校正后系统中频段斜率等于-20dB/dec,使系统具有45°~60°的相角裕量。
以加快系统的反应速度,但同时它也削弱了系统抗干扰的能力。
在工程实践中一般不希望系数a值很大,当a=20时,最大超前角为60°,如果需要60°以上的超前相角时,可以考虑采用两个或两个以上的串联超前校正网络由隔离放大器串联在一起使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
K=2Kv=40
原系统的开环频率特性函数为
Kv 20 = G ( jω)H( jω) = jω(0.5 jω + 1) jω(0.5 jω + 1)
由原系统Bode图,得原系统截止频率
ωc = 6.2rad / s
相角 φ(ω ) = −90° − tan −1 (0.5ω ) = −162° c c 相角裕度 γ = 180° + φ(ωc ) = 18° 未达到给定的设计要求 所需的超前相角至少为45o-18o=27o 考虑一定余量(10%),设 φ = 30°
开环对数频率特性的一般要求
伯德图
L(dB)低频段
中频段
高频段
γ = 30° ~ 60°
h > 6dB
-20dB/dec
(1)中频段以-20dB/dec的斜率 穿越零分贝线,而且这一斜率占 0 有足够的频带宽度,则系统的稳 定性好
ωc
ω
s −1
(2)截止频率wc越高,则系统的快速性越好 (3)低频段的斜率陡,增益高,表示系统的稳 态精度好(即稳态误差小)
− ςπ / 1− ς 2
4 Ts = =3 ςωn
exp
= 0.1
得 ς = 0.59, ωn = 2.26
ς ≈ 60° 由系统参数得 φ pm = 0.01 明确频域指标后,可以按Bode图法设计校正网络 绘制K=500时原系统的Bode图
K=500;numg=[1];deng=[1 15 50 0]; [num,den]=series(K,1,numg,deng); w=logspace(-1,2,200); [mag,phase,w]=bode(num,den,w); [Gm,Pm,Weg,Wep]=margin(mag,phase,w); %原系统相角 Phi=(60-Pm)*pi/180; %所需附加的相角 alpha=(1+sin(Phi))/(1-sin(Phi)); %计算a M=-10*log10(alpha)*ones(length(2),1);%用于绘-10lga线 [mag,phase,w]=bode(num,den,w); semilogx(w,20*log10(mag), w,M),grid; xlabel('frequency[rad/sec]'),ylabel('mag[dB]');
课后作业 考虑x-15飞机的姿态控制问题 姿态控制系统的简化模型如图
1 s
K 1ω 2 a (ι a s + 1) s 2 + sςωa s + ωa a
dθ dt
当飞机以4倍音速在100000英尺高空飞行时, 姿态控制系统的参数分别取为:
1 = 1.0, K1 = 1.0 ιa
ζωa = 1.0, ωa = 4
−1 −1
γ = 180° + φ(ωc ) = 47.3°
满足设计要求
利用MATLAB来进行系统设计 例4.3 转子绕线机控制系统 每个小型直流电机都有3个独立的转子线 圈,上面需要缠绕几百圈的铜线。绕线机 用直流电机来缠绕铜线,它应该能快速准 确地绕线,并使线圈连贯坚固。采用自动 绕线机后,操作人员只需要从事插入空转 子、按下启动按钮和取下绕线转子等简单 操作。控制系统设计的目标是使绕线速度 和缠绕位置都具有很高的稳态精度。
开环对数频率特性的一般要求
伯德图
γ = 30° ~ 60°
h > 6dB
L(dB)低频段
中频段
高频段
(1)中频段以-20dB/dec的斜率 穿越零分贝线,而且这一斜率占 有足够的频带宽度,则系统的稳 0 定性好 (2)截止频率wc越高,则系 统的快速性越好
-20dB/dec
ωc
ω
s −1
(3)低频段的斜率陡,增益高,表示系统的稳态精度好(即静差率小,调 速范围宽)
例4.3 转子绕线机控制系统 绕线机控制系统如图。
R(s) Gc(s)
1 s(s + 5)(s + 10)
C(s)
设计校正网络,是系统对斜坡输入有很高的 稳态精度 首先考虑简单的增益放大器Gc(s)=K 50 系统的稳态误差为: ess = K
MATLAB文本程序
K=[50 100 200 500]; numg=[1];deng=[1 15 50 0]; t=0:0.1:5; for i=1:4 [nums,dens]=series(K(i),1,numg,deng); [num,den]=cloop(nums,dens); [y,x]=step(num,den,t); Ys(:,i)=y; end plot(t,Ys(:,1),'-',t,Ys(:,2),'-',t,Ys(:,3),'-',t,Ys(:,4),'-'); xlabel('Time(sec)');ylabel('y(t)')
当飞机以4倍音速在100000英尺高空飞行时, 姿态控制系统的参数分别取为:
1 = 1.0, K1 = 1.0 ιa
ζωa = 1.0, ωa = 4
K 1ω 2 a (ι a s + 1) s 2 + sςωa s + ωa a
1 s
dθ dt
试设计一个校正网络Gc(s),使系统阶跃响应的 超调量小于5%,调节时间小于5s(按5%准则)
用超前校正网络设计 设超前校正网络的传递函数为 K (s + z) G c (s) = 其中|z|<|p| (s + p) 设计要求是(1)系统对斜坡输入响应的稳态误差 小于10%,Kv=10;(2)系统对阶跃输入的超调量小 于10%;(3)按2%准则调节时间Ts不超过3s 根据给定的设计要求,有关公式如下
校正后系统的实际阶跃响应
K=1800; numg=[1];deng=[1 15 50 0]; numgc=K*[1 3.5];dengc=[1 25]; [nums,dens]=series(numgc,dengc,numg,deng); [num,den]=cloop(nums,dens); t=[0:0.01:2]; step(num,den,t); ylabel('y(t)');
4. 2 伯德图法
频域性能指标
4.2.1对控制系统的一般要求 开环对数频率特性的一般要求 L(dB)低频段 怎么才是 /为什么它是 理想的伯德图 ?
0 中频段 高频段
-20dB/dec
ωc
ω
s −1
(1)中频段以-20dB/dec的斜率穿越零分贝 线,而且这一斜率占有足够的频带宽度,则系 统的稳定性好 相角裕度 γ = 30° ~ 60° 幅值裕度 h > 6dB
例4.2 2阶系统的超前校正网络
考虑2阶反馈控制系统,其开环传递函数为 K G (s)H(s) = s(s + 2)
给定的设计要求:系统的相角裕度不小于 45o,系统斜坡响应的稳态误差为5%。根据需 要引入合适的超前校正网络。 解: 由稳态误差要求可知
A A Kv = = = 20 ess 0.05A
由
a −1 = sin 30° = 0.5 a +1
解得a=3
由于10loga=4.8dB,在原系统幅频曲线上,可看 到于-4.8dB对应的频率为ωm = 8.4rad / s 在超前网络的零点和极点处,可得
p = ωm a = 14.4
z = p / a = 4 .8
超前校正网络的传递函数 1(1 + s / 4.8) G c (s) = 3(1 + s / 14.4)
按Bode图法设计校正网络后 绘制校正后系统的Bode图 K=1800; numg=[1];deng=[1 15 50 0]; numgc=K*[1 3.5];dengc=[1 25]; [num,den]=series(numgc,dengc,numg,deng); w=logspace(-1,2,200); [mag,phase,w]=bode(num,den,w); [Gm,Pm,Weg,Wep]=margin(mag,phase,w); bode(num,den,w) title(['Gaom,argom=',num2str(Gm),'Phase margin=',num2str(Pm)]);
m
4)验算已校正系统的相角裕度
′ γ ′′ = ϕ m + γ (ωc′ )
4.2.2 Bode图法 用Bode图设计超前校正网络的步骤
1)根据稳态误差要求,确定开环增益K 2)利用已确定的开环增益,计算待校正系统的相角裕度
3)在允许的调节范围内,确定所需要的最大 超前相角 φ m a −1 4)计算a,利用式 tan φ m = a +1 5)计算10loga,在原系统幅频曲线上,确定频 ″ 率 ωc ′ ωm ,公式 − L′(ωc′ ) = Lc (ωm ) = 10 lg a 6)计算极点频率 p = ωm a 零点频率 z = p / a 7)校验新系统是否满足性能指标
经过校正的系统开环传递函数
20[(s / 4.8) + 1] aG c (s)G (s)H(s) = s(0.5s + 1)[(s / 14.4) + 1]
校验
ωc −1 ωc φ(ωc ) = −90 − tan 0.5ωc − tan + tan 14.4 4.8 = −90 − 76.5 − 30 − 60.2 = −136.3°
(4)高频段衰减得越快,即高频特性负分贝值 低,说明系统抗高频噪声干扰的能力越强
4.2.2 Bode图法
L( ω )
− 1 αT
1 −1 αT T