冗余配置例子
实验五配置交换机间的冗余链路

实验五配置交换机间的冗余链路一、实验目的1、交换机MAC地址2、了解STP(生成树协议)3、选择并设置根网桥二、实验背景某公司使用三台交换机将60台计算机相互连接起来构成局域网。
为确保交换机和交换机之间的连接万一出现故障时不致影响整个网络的正常运行,网络构建为如下图所示的含有冗余链路的网络。
图5.1含有冗余链路的交换网络三、分析准备图5.1所示的网络中,任意两台交换机之间都有两条通路连接。
但是,含有冗余链路的交换网络会造成交换环路,容易形成广播风暴。
为此,交换机通过运行STP协议来解决此问题。
1、理论准备STP是一个开放式标准协议,基本不需要配置。
使用STP的交换机运行时会不断检查网络,一旦发现环路,就会自动阻止某些端口(使其进入待命状态)而保留其它一些端口,使网络中的所有交换机形成一个树形拓扑结构,从而确保网络中不存在任何环路;而当发现现有路径出现故障而失效时,则通过自动启用适当的待命路径来重新配置网络。
在含有冗余链路的交换网络中,位于STP生成的交换机树形拓扑的最上层的交换机称为根交换机。
STP在生成树形拓扑时,会根据各交换机的BID值选择BID值最小的交换机作为整棵树的根交换机,然后由根交换机来确定哪些端口待命,哪些端口转发数据;之后,根交换机还会向网络中的其它交换机发送含有网络拓扑信息的BPDU(交换机协议数据单元)信息,以便在出现故障时可自动重新构建网络。
交换机的BID值由交换机优先级和交换机的MAC地址构成,其格式为:“交换机优先级:交换机MAC地址”。
如某交换机的优先级为4096,MAC地址为000B.BE05.D89E,则该交换机的BID值为:4096:000B.BE05.D89E。
所有交换机的默认优先级均为32768,因此默认情况下,交换机BID值的大小就决定于交换机MAC地址值的大小。
由于MAC地址值一般不能改变,因此如果需要,管理员可以通过修改交换机优先级值的方式来改变交换机的BID值。
1756冗余配置说明编写
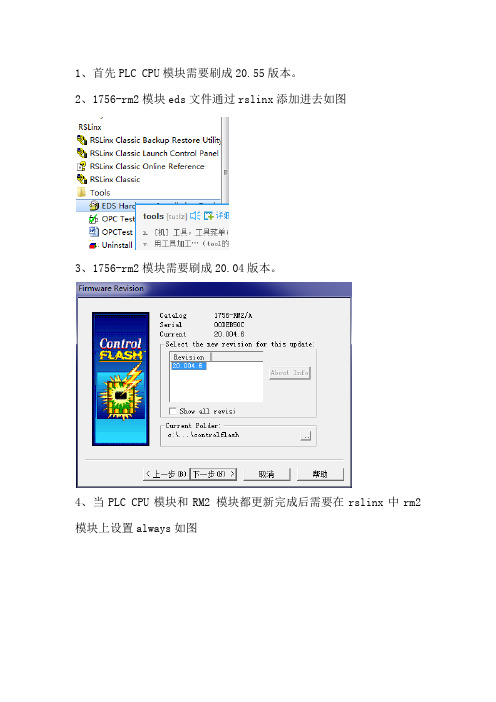
1、首先PLC CPU模块需要刷成20.55版本。
2、1756-rm2模块eds文件通过rslinx添加进去如图
3、1756-rm2模块需要刷成20.04版本。
4、当PLC CPU模块和RM2 模块都更新完成后需要在rslinx中rm2模块上设置always如图
5、设置好后需要在程序中选择使能冗余模式如图redundancy enable 前打钩。
6、当冗余设置完成后还需要在程序中进行1756-en2tr进行设置点击属性如图
connection需要选择None
time sync Connection 需要选择None
6、因为程序里找不到1756-rm2所以不用添加了直接从以太网模块进行添加。
如图
7、添加好后再对1756-en2tr模块进行I/O子站添加。
8、子站添加好后需要对以太网模块进行设置
属性enable supervisor mode打钩
9、以上都完成后便可以进行子站添加及编写程序。
冗余配置例子

1 引言Controllogix是Rockwell公司在1998年推出AB系列的模块化PLC,代表了当前PLC发展的最高水平,是目前世界上最具有竞争力的控制系统之一,Control- logix将顺序控制、过程控制、传动控制及运动控制、通讯、I/O技术集成在一个平台上,可以为各种工业应用提供强有力的支持,适用于各种场合,最大的特点是可以使用网络将其相互连接,各个控制站之间能够按照客户的要求进行信息的交换。
Controllogix可以提供完善的控制器的冗余功能,采用热备的方式构建控制器,两个控制器框架采用完全相同的配置,它们之间使用同步电缆连接,不仅控制器可以采用热备,通讯网络也可以采用相似的方式进行热备,除以上的部分可以热备外,控制器的电源也可以进行热备,这样大大提高了控制器的运行的可靠性。
2 系统介绍在某焦化厂干熄焦汽轮机发电项目的DCS控制系统中,采用了冗余的Controllogix,系统结构如图1所示。
上位机通过交换机与PLC处理器通讯,远程框架通过冗余的ControlNet连接到控制器框架,同时,远程框架采用了冗余电源配置。
整套系统具有很高的可靠性,满足了汽轮机发电系统对于PLC控制部分需要长期无故障运行的要求。
上位机采用Rsview32软件,用以监控现场设备的运行。
图1 系统结构图本地框架由L1和L2 框架构成,运行时L1和L2互为热备,构成了冗余,L1和L2框架各个槽位的所配置的模块如表1所示。
R1,R2和R3是远程框架,所有的点号都连接到远程框架的模块,远程框架的供电使用了AB的冗余电源(1756-PAR2)。
收藏引用muzi_woody1楼2007-9-21 7:41:00表1 L1和L2框架各个槽位的所配置的模块设置主从控制器框架的1756-CNBR/D的节点地址时应注意,他们的地址拨码应该相同,应该是系统中挂接在冗余ControlNET网上所有节点的最高地址,在本系统里面都设置为4,远程站的节点地址分别为1,2,3。
机械设计上冗余设计的例子

机械设计上冗余设计的例子冗余设计在机械工程中是一种重要的设计策略,它通过增加额外的组件、系统或功能,来确保在原始设计失效或发生故障时,整个机械系统仍能维持其基本性能和安全操作。
这种方法不仅提高了设备的可靠性和耐久性,而且在一定程度上降低了由于单点故障导致系统完全失效的风险。
本文将探讨冗余设计在机械设计中的几个实际应用案例,并分析其如何提升整体系统的稳健性。
一、冗余设计的基本概念在机械设计领域,冗余设计通常指的是在系统中引入额外的、超出基本功能需求的元素。
这些元素可以是硬件组件,如备用发动机、双重电源系统等;也可以是软件功能,比如故障检测和自动切换程序。
冗余设计的核心思想是预防因单一故障点导致的整体系统崩溃,从而增强系统的鲁棒性和容错能力。
二、冗余设计的类型在机械设计中,冗余设计可以根据其实现方式和目的分为不同类型,主要包括硬件冗余和软件冗余。
1. 硬件冗余硬件冗余通常涉及在关键部位安装备份组件。
例如,在飞机设计中,双发动机配置就是一种典型的硬件冗余设计。
如果其中一个发动机失效,另一个发动机能够接管飞行任务,确保飞机安全着陆。
类似地,在重型机械如挖掘机或矿用卡车的设计中,关键液压系统可能会采用双泵或双回路设计,以防止单个泵的故障导致整个机器停工。
2. 软件冗余软件冗余则更多体现在控制系统的编程逻辑上。
现代机械设备往往配备有复杂的电子控制系统,这些系统通过软件算法监控设备的运行状态,并在检测到异常时采取纠正措施。
例如,汽车中的防抱死刹车系统(ABS)就包含了软件冗余设计,它能够在检测到车轮即将锁死时迅速调整刹车压力,防止车辆失控。
三、机械设计中的冗余设计案例以下是一些展示了冗余设计在机械工程中实际应用的案例。
案例一:航天器的冗余设计航天器是冗余设计应用最为广泛的领域之一。
由于航天任务的高风险性和难以进行维修的特性,航天器必须在设计之初就考虑到各种可能的故障情况。
例如,国际空间站(ISS)就采用了多重冗余设计,包括备用电源系统、生命维持系统以及通讯系统等。
冗余系统配置
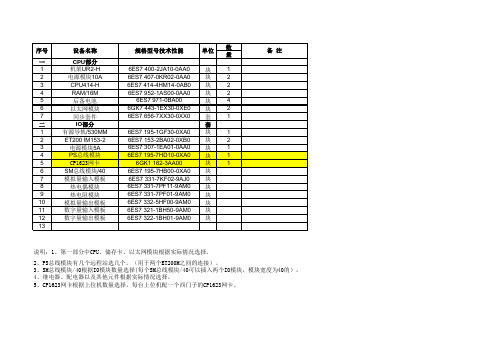
一 1 2 3 4 5 6 7 二 1 2 3 4 5 6 7 8 9 10 11 12 13
设备名称
CPU部分 机架UR2-H 电源模块10A CPU414-H RAM/16M
后备电池 以太网模块
同步套件 IO部分 有源导轨/530MM ET200 IM153-2 电源模块5A PS总线模块 CP1623网卡 SM总线模块/40 模拟量输入模板 热电偶模块 热电阻模块 模拟量输出模板 数字量输入模板 数字量输出模板
数量一1cpu部分机架ur2h电源模块10acpu414h6es74002ja100aa0块块块块块块套套块块块块块块块块块块块块126es74070kr020aa0236es74144hm140ab024ram16m6es79521as000aa025后备电池以太网模块同步套件io部分有源导轨530mmet200im1532电源模块5aps总线模块cp1623网卡sm总线模块40模拟量输入模板热电偶模块热电阻模块模拟量输出模板数字量输入模板数字量输出模板6es79710ba00466gk74431ex300xe0276es76567xx300xx01二16es71951gf300xa0126es71532ba020xb0236es73071ea010aa0146es71957hd100xa0156gk11623aa00166es71957hb000xa076es73317kf029aj086es73317pf119am096es73317pf019am0106es73325hf009am0116es73211bh509am0126es73221bh019am013说明
6ES7 331-7PF01-9AM0 块
6ES7 332-5HF00-9AM0 块
6ES7 321-1BH50-9AM0 块
1756冗余配置说明编写

1、首先PLC CPU模块需要刷成20.55版本。
2、1756-rm2模块eds文件通过rslinx添加进去如图
3、1756-rm2模块需要刷成20.04版本。
4、当PLC CPU模块和RM2 模块都更新完成后需要在rslinx中rm2模块上设置always如图
5、设置好后需要在程序中选择使能冗余模式如图redundancy enable 前打钩。
6、当冗余设置完成后还需要在程序中进行1756-en2tr进行设置点击属性如图
connection需要选择None
time sync Connection 需要选择None
6、因为程序里找不到1756-rm2所以不用添加了直接从以太网模块进行添加。
如图
7、添加好后再对1756-en2tr模块进行I/O子站添加。
8、子站添加好后需要对以太网模块进行设置
属性enable supervisor mode打钩
9、以上都完成后便可以进行子站添加及编写程序。
冗余设计的例子及解析

冗余设计的例子及解析
冗余设计是指在系统设计中增加冗余的部分,以提高系统的可靠性和
容错性。
下面将介绍几个冗余设计的例子及其解析。
1. RAID(磁盘阵列)
RAID是一种通过将多个硬盘组合成一个逻辑驱动器来提高数据存储可靠性和性能的技术。
RAID技术通过将数据分散存储在多个硬盘上,从而提高了数据的可靠性。
当一个硬盘出现故障时,系统可以通过其他
硬盘上的数据进行恢复,从而避免了数据的丢失。
2. 双机热备
双机热备是指在系统设计中使用两台服务器,其中一台作为主服务器,另一台作为备份服务器。
当主服务器出现故障时,备份服务器会自动
接管主服务器的工作,从而保证系统的连续性和可靠性。
3. 冗余电源
冗余电源是指在系统设计中使用多个电源供应器,以提高系统的可靠性。
当一个电源供应器出现故障时,其他电源供应器可以继续为系统
提供电力,从而避免了系统的停机。
4. 冗余网络
冗余网络是指在系统设计中使用多个网络连接,以提高系统的可靠性和容错性。
当一个网络连接出现故障时,系统可以通过其他网络连接继续进行通信,从而避免了通信中断。
总之,冗余设计是提高系统可靠性和容错性的重要手段。
在系统设计中,应根据实际情况选择合适的冗余设计方案,以保证系统的稳定性和可靠性。
冗余设计的例子及解析
冗余设计的例子及解析冗余设计的概念和作用冗余设计是指在系统或产品设计中,有意地增加冗余元素或组件来提高系统的可靠性、稳定性和容错性的一种设计方法。
冗余设计可以通过增加备用元素、组件、路径或操作来实现。
在冗余设计中,当出现故障或错误时,系统可以自动切换到备用元素或组件上,从而保证系统的正常运行。
冗余设计的主要作用包括:1.提高系统的可靠性:通过增加备用元素或组件,可以减少系统故障的概率,提高系统的可靠性。
即使某个元素或组件发生故障,系统仍然可以正常运行。
2.提高系统的稳定性:冗余设计可以使系统更加稳定。
当系统的某个元素或组件发生故障时,系统可以自动切换到备用元素或组件上,避免了系统的中断或崩溃。
3.提高系统的容错性:冗余设计可以增加系统的容错性。
当系统的某个元素或组件发生故障时,系统可以自动切换到备用元素或组件上,使系统能够继续正常运行,而不会对用户造成影响。
冗余设计的例子1. 冗余电源设计在电力系统设计中,通常会使用冗余电源设计来提高电力供应的可靠性。
例如,在一个数据中心中,为了保证服务器的正常运行,会使用双路供电系统。
每个服务器都连接到两个独立的电源回路,当一个电源回路发生故障时,系统可以自动切换到备用电源回路,确保服务器的稳定供电。
2. 冗余网络设计在计算机网络设计中,为了提高网络的可靠性和稳定性,通常会采用冗余网络设计。
例如,企业内部的局域网通常会建立多条网络链路,并使用冗余交换机。
当其中一条网络链路或交换机发生故障时,系统可以自动切换到备用链路或交换机,避免了网络中断。
3. 冗余存储设计在数据存储系统设计中,为了保护数据的安全性和可用性,通常会采用冗余存储设计。
例如,RAID(冗余磁盘阵列)技术可以通过将数据分布在多个硬盘上,实现数据的冗余存储和容错性。
当某个硬盘发生故障时,系统可以使用备用硬盘上的数据来恢复数据完整性。
4. 冗余传感器设计在工业自动化系统中,为了提高传感器的可靠性和准确性,通常会使用冗余传感器设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引言
Controllogix是Rockwell公司在1998年推出AB系列的模块化PLC,代表了当前PLC发展的最高水平,是目前世界上最具有竞争力的控制系统之一,Control- logix将顺序控制、过程控制、传动控制及运动控制、通讯、I/O技术集成在一个平台上,可以为各种工业应用提供强有力的支持,适用于各种场合,最大的特点是可以使用网络将其相互连接,各个控制站之间能够按照客户的要求进行信息的交换。
Controllogix可以提供完善的控制器的冗余功能,采用热备的方式构建控制器,两个控制器框架采用完全相同的配置,它们之间使用同步电缆连接,不仅控制器可以采用热备,通讯网络也可以采用相似的方式进行热备,除以上的部分可以热备外,控制器的电源也可以进行热备,这样大大提高了控制器的运行的可靠性。
2 系统介绍
在某焦化厂干熄焦汽轮机发电项目的DCS控制系统中,采用了冗余的Controllogix,系统结构如图1所示。
上位机通过交换机与PLC处理器通讯,远程框架通过冗余的ControlNet 连接到控制器框架,同时,远程框架采用了冗余电源配置。
整套系统具有很高的可靠性,满足了汽轮机发电系统对于PLC控制部分需要长期无故障运行的要求。
上位机采用Rsview32软件,用以监控现场设备的运行。
图1 系统结构图
本地框架由L1和L2 框架构成,运行时L1和L2互为热备,构成了冗余,L1和L2框架各个槽位的所配置的模块如表1所示。
R1,R2和R3是远程框架,所有的点号都连接到远程框架的模块,远程框架的供电使用了AB的冗余电源(1756-PAR2)。
收藏
引用
muzi_woody
1楼 2007-9-21 7:41:00
表1 L1和L2框架各个槽位的所配置的模块
设置主从控制器框架的1756-CNBR/D的节点地址时应注意,他们的地址拨码应该相同,应该是系统中挂接在冗余ControlNET网上所有节点的最高地址,在本系统里面都设置为4,远程站的节点地址分别为1,2,3。
在冗余系统正常运行时,从控制器框架的CNBR/D节点地址会自动加1,变为5。
1757-SRM是用于同步的冗余模块,主从控制器框架的SRM通过光纤连接。
正常工作时,1756- L61中所有的程序和数据通过光纤进行同步,在RSLOGIX5000编程中,不必对此模块进行组态。
1756-ENBT是以太网接口模块,通过网线连接到交换机。
ENBT的地址分配为两个连续的IP即可,在这个系统中IP地址分别为192.168.1.11和192.168.1.12。
3 模块的升级
冗余系统中,主控制器框架和从控制器框架上各个模块的版本必须严格一致,并到达到
要求的版本号,否则无法正常工作。
当版本不一致时,在RSLinx中可能无法看到从控制器框架上的处理器,同时,从控制器框架的处理器状态指示灯(OK灯)变为红色长亮。
因此,一般系统在第一次上电时,需要进行固件升级。
根据AB公布的信息,当前一些模块的固件版本如表2所示,这个版本同样适用于1756-L62, 1756-L63。
表2 一些模块的固件版本
上电后,首先在RSLinx中检查模块的版本号,如果与表2不一致,需要到AB网站上去下载这个版本的升级包V13.71 Redundancy Bundle。
升级工作需要使用Rockwell的固件升级软件ControlFLASH。
升级前,先要取消SRM的从框架资格,在RSLinx中,从框架比主框架的节点地址大1。
从图标上进入1757-SRM的属性,找到Configration的Auto-Synchonization选项,将参数改为NEVER.然后进入Synchonization选项卡,单击Disqualify Secondary(取消从框架资格),这个时候主从处理器之间就不会同步了。
升级时,先打开一个处理器框架的电源,关闭另一个框架的电源。
等1757-SRM显示PRIM 后,在RSLinx中可以找到这个框架中的模块。
然后使用ControlFLASH分别进行升级。
升级完毕后,关闭这个处理器框架的电源,打开另一个框架的电源,也如此进行升级。
升级完毕后,进入1757-SRM的属性,将从控制器设为主控制器,使用RSLogix5000将程序下载到从处理器,关闭机架电源,进入从1757-SRM的属性,选择BecomePrimary,然后进入RSLogix5000的通讯菜单,清除掉故障。
完成以上升级工作后,主从控制器框架都上电,然后使用RSNetWorx for ControlNET对网络进行调度。
在正常工作情况下,一般哪一个框架先上电,哪一个就是主框架,另一个是从框架,主框架的1757-SRM会显示PRIM,从框架的会显示SYNC。
正常运行时,在SRM属性中可以进行主从的切换。
如果显示状态与这个不一致,表示系统同步出现问题,需要进行进行检查,刚上电时因为SRM需要自检,可能要花一些时间。
如果同步光纤、ControlNET或者以太网出现连接问题,都有可能导致同步不正常。
在RSLogix5000中进行冗余系统的编程时,只能使用一个连续性任务或几个周期性任务。
尽量不要使用SINT和INT型的数据,另外,数据的定义最好都采用数组完成,这样可以提高同步时的效率。
在打点和程序调试期间,由于经常下载程序,这个时候容易导致同步出错,最好在1757-SRM中把自动同步选项设为禁用,采用手动的方式进行同步。
等调试完毕后,再把这个选项打开,正式将系统投运。
4 RSLinx中的冗余配置
为了保证冗余系统能够和上位机的HMI软件正常通讯,需要在RSLinx中进行冗余配置。
RSLinx中,首先定义两个Topic,分别指向主框架和从框架的处理器,然后,在Alias Topic 中,定义一个别名Topic,指向刚才定义的两个Topic,在使用时,HMI中的节点的定义只要指向别名Topic就可以了,当处理器发生主从切换时,HMI仍然可以保持正常的通讯。
引用
muzi_woody
2楼 2007-9-21 7:41:51
5 SRM时间同步
1757-SRM正常运行时,需要对同步过程中发生的事件按照时间顺序进行记录,1757-SRM
出厂时的缺省时间不是当前的时间,因此需要对SRM进行时间重新设置。
在设置1757-SRM 时间时,笔者采用编程的方式将1757-SRM的时间与处理器的时间进行同步,同时,利用AB 提供的时间同步工具,笔者可以将处理器的时间与上位机的时间进行同步,这样也就实现了1757-SRM与上位机的时间同步。
在RSLogix5000中添加程序,如图2所示:
图2 RSLogix5000中添加程序
GSV中读出的时间数据写入到WCT(WCT定义为DINT[2].)然后,由MSG把数组WCT的值写入到SRM的时间属性。
MSG指令的设置如图3所示。
图3 MSG指令的设置
通讯配置如图4所示。
通讯配置的格式为:1,SRM的槽号。
图4 配置显示
这一程序表示从处理器中读出时间,放入到WCT中,然后把WCT的值写入到SRM中。
程序运行后,处理器和SRM的时间就实现同步了。
然后在上位机运行时间同步工具。
"C:Program FilesRockwell SoftwareRSLogix 5000 ToolsLogix5000 Clock Update Tool"
先添加设备,从RSWho中选中要同步的处理器。
在添加的处理器图标上点击鼠标右键,在弹出的菜单中选择synchronize device,这样就实现了上位机与CPU的时间同步。
那末也就实现了SRM与上位机的时间同步。
如果Controllogix的时间误差较大,但又对SRM的时间要求较高,可以利用时间同步工具的常驻内存运行功能,实现实时的时间同步。
在scheduled synchronizations菜单中可以添加需要进行实时时间同步的CPU,同步的时间间隔进行相应的配置后,就可以实现实时的时间同步了。
利用这个原理,通过相应的设置,可以实现同一网络中不同Controllogix处理器之间的时间同步,或者不同SRM之间的时间同步,也可以时间不同网络之间的时间同步。
6 处理器的故障处理
虽然在处理器发生故障时,会导致处理器的切换,但我们可以通过编程来防止可以预见的故障的产生。
当处理器在运行过程中出现主要故障时,可以使用程序清除这一故障。
在RSLogix5000的用户自定义类型中,定义一个名为FaultData的数据类型,内部变量的数据类型如图5所示。
然后定义一个变量CHI为FaultData。
然后如图6所示添加控制器故障处理程序。
程序如图7所示。
图5 FaultData内部变量的数据类型
图6 添加控制器故障处理程序
图7 控制区故障处理程序
通过以上程序可以很好的防止处理器主要故障的发生。
一般次要故障不会引起处理器停机和冗余的切换,因此次要故障的处理程序不是很有必要。
7 结束语
引。