河北科技大学 自动控制试卷A(2012)
(完整版)自动控制原理试题及答案
一、 单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( C )A.系统综合B.系统辨识C.系统分析D.系统设计2. 惯性环节和积分环节的频率特性在( A )上相等。
A.幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( C )A.比较元件B.给定元件C.反馈元件D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( A )A.圆B.半圆C.椭圆D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( B )A.比例环节B.微分环节C.积分环节D.惯性环节6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为( C ) A.1 B.2 C.5 D.107. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是( B ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统8. 若保持二阶系统的ζ不变,提高ωn ,则可以( B )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C.提高上升时间和调整时间D.减少上升时间和超调量9. 一阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( A ) A.45° B.-45° C.90° D.-90°10.最小相位系统的开环增益越大,其( D )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( A )A.稳定B.临界稳定C.不稳定D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s k s G ,当k =( C )时,闭环系统临界稳定。
河北科技大学电机学考试试题 (3)

六、写出下列两个图的连接组号(要求画相量图,时钟表示法) (11分)
2、一台17KW、220V的并励直流电动机,电枢总电阻Ra=0.1Ω,额定电流 为IN=95A,额定励磁电流IfN=4.5A,额定转速nN=1450r/min,,试求 在额定负载时电动机的下列数据:(1)电枢电流和电枢电动势; (2)电磁功率和电磁转矩;(3)输入功率和效率。(10分)
3、一台三相、四极、380V、三角形连接的感应电动机,其参数为:
(
)
四、选择题(将正确答案前的字母填入空中)(1×10=10分)
1、并励直流发电机正转时,空载电动势Ea=230V,停下来后,在第
种情况下,空载电动势Ea=-230V。
A、原动机以同样的转速反转
B、对调一下励磁绕组的两出线端,原动机以同样的转速正转
C、对调一下励磁绕组的两出线端,原动机以同样的转速反转
。
A、相对静止 B、高于定子磁动势的转速
C、为零
D、低于定子磁动势的转速
8、削弱齿谐波的方法是
。
A、采用斜槽 B、采用分布绕组 C、采用短距绕组 D、改善主
磁场分布
9、为使单相异步电动机产生圆形磁场,可满足条件
。
A、主副绕组在空间相差90º电角度,并在两绕组中通以相差90º的电
流
B、主副绕组在空间相差90º电角度,没必要通相差90º的电流
三、判断题(正确的打√,错误的打×),(1×10=10分)
1、直流电动机的能量转换中,电磁功率代表着该电动机损耗的大小 (
自动控制19套试题及答案详解
一.填空题。
(10分)1.传递函数分母多项式的根,称为系统的2. 微分环节的传递函数为3.并联方框图的等效传递函数等于各并联传递函数之4.单位冲击函数信号的拉氏变换式5.系统开环传递函数中有一个积分环节则该系统为型系统。
6.比例环节的频率特性为。
7. 微分环节的相角为。
8.二阶系统的谐振峰值与有关。
9.高阶系统的超调量跟有关。
10.在零初始条件下输出量与输入量的拉氏变换之比,称该系统的传递函数。
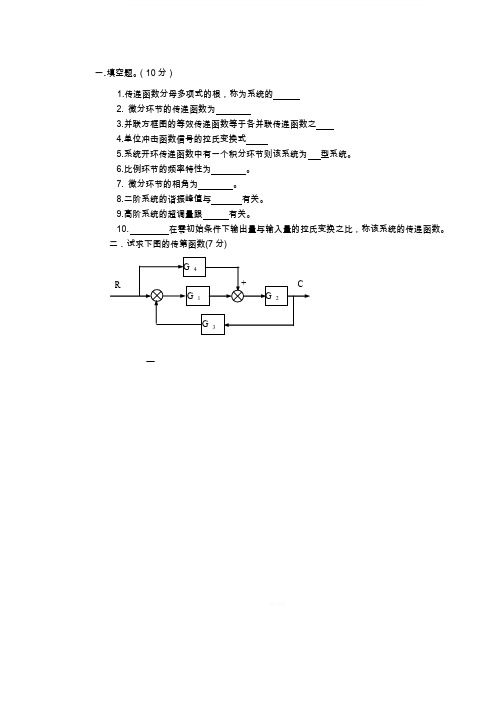
二.试求下图的传第函数(7分)精品资料三.设有一个由弹簧、物体和阻尼器组成的机械系统(如下图所示),设外作用力F(t)为输入量,位移为y(t)输出量,列写机械位移系统的微分方程(10分)四.系统结构如图所示,其中K=8,T=0.25。
(15分)(1)输入信号x i(t)=1(t),求系统的响应;(2)计算系统的性能指标t r、t p、t s(5%)、бp;(3)若要求将系统设计成二阶最佳ξ=0.707,应如何改变K值精品资料五.在系统的特征式为A(s)=6s+25s+84s+123s+202s+16s+16=0,试判断系统的稳定性(8分)精品资料)1001.0)(11.0()(++=s s s Ks G七.某控制系统的结构如图,其中要求设计串联校正装置,使系统具有K ≥1000及υ≥45。
的性能指标。
(13分)精品资料sT s s s G 25.0,)4(1)(=+=.八.设采样控制系统饿结构如图所示,其中 试判断系统的稳定性。
(10分)精品资料九. 已知单位负反馈系统的开环传递函数为: 试绘制K由0 ->+∞变化的闭环根轨迹图,系统稳定的K 值范围。
(15分)一、填空题:(每空1.5分,共15分),)4()1()(22++=s s Ks G1.当扰动信号进入系统破坏系统平衡时,有重新恢复平衡的能力则该系统具有。
2.控制方式由改变输入直接控制输出,而输出对系统的控制过程没有直接影响,叫。
3.线性系统在零初始条件下输出量与输入量的之比,称该系统的传递函数。
《自动控制原理》A卷答案(电气工程及自动化专业)

山东科技大学2007—2008学年第一学期《自动控制原理》考试试卷(A 卷)答案及评分标准班级 姓名 学号一、填空题(每空1分,共15分)1、对自动控制系统的基本性能要求可归纳为三个方面,这三个方面是 稳 、快 、 准 。
2、对于最小相位系统,开环对数幅频特性的低频区决定了系统的准确性能;中频区决定了系统的 快速性能。
高频区决定了系统 抗干扰 性能。
若要求提高系统的响应速度应选择 超前 校正装置。
若要求提高系统抑制噪声的能力应选择 滞后 校正装置。
3、某反馈控制的特征函数)5s 1)(2s .01()5s .01)(1s .01()s (H )s (G 1)s (F ++++=+=则该系统的开环极点 -5,-0.2 ,为闭环极点为 -10,-2 。
4、如下图所示系统的开环放大倍数为 100 ,当输入信号4=)t (r 时,系统稳态误差为4/101 ,当输入信号4=)t (r t 时,系统稳态误差为 ∞。
5、系统传递函数2345)(2+++=s s s s G ,其可控标准型为[]x y u x x54,103210--=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=。
可观测标准型动态方程为[]x y u x x 10,543120=⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡--= 。
二、选择题(每题3分,共15分)1、若系统(或元件)的某输入 输出的拉氏变换分别为)(),(0s x s x i ,对应的传递函数记为G(s),则下列说法是不正确的有(B ) A 在零初始条件下,)()(0s X s X i =G(s);B )()(G(s)0s X s X i =,描述了系统的全部信息;C 若g(t)为单位脉冲响应,则L[g(t)]G(s)=;D G(s)反映了系统本身的固有特性。
2、已知系统的状态方程和输出方程为[]x y u x x532,121132=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---= ,则系统状态( A )。
自动控制测试题附答案

自动控制测试题附答案1.输入已知,确定系统,使输出尽可能复合给定的最佳要求,称为()A.滤波与预测B. 最优控制C.最优设计D.系统分析2.开环控制的特征是()A.系统无执行环节B.系统无给定环节C.系统无反馈环节D.系统无放大环节3. 对于代表两个或两个以上输入信号进行()的元件又称比较器。
A.微分B.相乘C.加减D.相除4. 直接对控制对象进行操作的元件称为()A.给定元件B.放大元件C.比较元件D.执行元件5. 在系统对输入信号的时域响应中,其调整时间的长短是与()指标密切相关。
A.允许的峰值时间B.允许的超调量C.允许的上升时间D.允许的稳态误差6. 已知系统的微分方程为()()()t x t x t xi 22600=+ ,则系统的传递函数是() A.131+s B.132+s C.261+s D.232+s7. 已知系统的微分方程为()()()()t x t x t x t xi 2263000=++ ,则系统的传递函数是() A.26322++s s B.26312++s s C.36222++s s D.36212++s s8.引出点前移越过一个方块图单元时,应在引出线支路上( )A.并联越过的方块图单元B.并联越过的方块图单元的倒数C.串联越过的方块图单元D.并联越过的方块图单元的倒数9.采用负反馈连接时,如前向通道的传递函数为G (s),反向通道的传递函数为H (s),则其等效传递函数为() A.)(1)(S G S G + B.)()(11S H S G + C.)()(1)(S H S G S G + D.)()(1)(S H S G S G — 10.某环节的传递函数是()5173+++=s s s G ,则该环节可看成由()环节串联而组成。
A.比例、积分、滞后B.比例、惯性、微分C.比例、微分、滞后D.比例、积分、微分11.某环节的传递函数是()ss s G 235++=,则该环节可看成由()环节串联而组成。
自动控制类考试题库及答案

自动控制类考试题库及答案一、单项选择题(每题2分,共40分)1. 自动控制系统中,开环系统与闭环系统的主要区别在于()。
A. 是否有反馈B. 控制器的类型C. 系统的稳定性D. 系统的响应速度答案:A2. 在自动控制系统中,系统稳定性的判断依据是()。
A. 系统响应曲线B. 系统误差C. 系统传递函数D. 系统开环增益答案:C3. 比例控制器(P控制器)的主要特点是()。
A. 无静差B. 有静差C. 响应速度慢D. 响应速度快答案:B4. 积分控制器(I控制器)的主要作用是()。
A. 消除静差B. 增加系统的稳定性C. 提高系统的响应速度D. 减少系统的超调答案:A5. 微分控制器(D控制器)的主要作用是()。
A. 消除静差B. 增加系统的稳定性C. 提高系统的响应速度D. 减少系统的超调答案:D6. 在自动控制系统中,超调量通常用来衡量系统的()。
A. 稳定性B. 响应速度C. 稳定性和响应速度D. 稳定性和精度答案:C7. 系统的时间常数τ与系统的()有关。
A. 响应速度B. 稳定性C. 精度D. 所有选项答案:A8. 系统增益Kp与系统的()有关。
A. 响应速度B. 稳定性C. 精度D. 所有选项答案:A9. 在自动控制系统中,系统的稳态误差与系统的()有关。
A. 系统类型B. 输入信号C. 系统增益D. 所有选项答案:D10. 系统动态性能的常用评价指标包括()。
A. 响应速度B. 稳定性C. 超调量D. 所有选项答案:D11. 系统静态性能的常用评价指标包括()。
A. 精度B. 稳定性C. 响应速度D. 所有选项答案:A12. 在自动控制系统中,系统的频率响应特性可以用来分析系统的()。
A. 动态性能B. 静态性能C. 稳定性D. 所有选项答案:A13. 系统的根轨迹图可以用来分析系统的()。
A. 动态性能B. 静态性能C. 稳定性D. 所有选项答案:C14. 在自动控制系统中,系统的零点和极点可以用来分析系统的()。
本二11-12A卷河北科技大学微机原理

河北科技大学2011—2012学年第1学期《微机原理及应用》考试试卷考场号:座位号:学院:班级:姓名:学号:题号一二三四五六七总分得分一、单项选择题:(每小题1分,共20分)1、对汇编语言源程序进行编译的文件是【】A.MASM.EXE B.EDIT.EXE C. DEBUG..EXE D. LINK.EXE2、对于伪指令语句VAR DW 100 DUP(3,5,7),其分配的存储空间为多少个字节单元。
【】A.100 B.200 C.300 D.6003、循环控制指令LOOPNZ控制循环继续执行的条件是【】 A.CX≠0且ZF=1 B.CX≠0且ZF=0C.CX≠0或ZF=1 D.CX≠0或ZF=04、设A=186,B=273Q,C=0BBH,它们之间的关系是【】 A.A>B>C B.A<B<C C.A=B=C D.A<B=C5、设DL=55H,执行指令后能使DL中的数据为0AAH的指令是【】A.TEST DL ,0AAHB.OR DL , 0AAHC.NEG DLD.XOR DL , 0FFH6、设AX中有一带符号数8520H,执行SAR AX , 1指令后,AX中的值是【】A.4290HB.0A40HC.0C290HD.0C260H7、标志寄存器中标志IF=1表示的是【】A.CPU可以接收可屏蔽中断请求B.运算结果低8位中所含1的个数为奇数C.运算结果超出了表示数的范围D. CPU按跟踪方式执行指令8、MOV AX,[BX+SI]的源操作数的物理地址是【】A.16×(DS)+(BX)+(SI)B.16×(ES)+(BX)+(SI)C.16×(SS)+(BX)+(SI)D.16×(CS)+(BX)+(SI)9、调试程序DEBUG中的指令U的含义是【】A.从指定地址显示内容B.从指定地址执行程序C.读并显示输入的字节D.反汇编10、程序运行过程中进行了一次FAR转移,则【】A. CS改变IP不变B. CS和IP都不变C. CS和IP都改变D. CS不变IP改变11、某条指令可以完成对指令中给出的操作数取补码的功能,这条指令为【】A. NEGB.XCHGC. XLATD. TEST12、ROR指令的意义是【】A. 不带CF的循环右移B. 带CF的循环右移C. 算术右移D. 逻辑右移13、假定DS=1000H,AX=2000H,[1234H]=30H,[1235H]=40H当执行完MOV AX ,[1234H]指令后,AX的值为【】A. 4030HB. 3040HC. 1234HD. 2000H14.在工作过程中,需要不断刷新的存储器是【】A.SRAMB.DRAMC.PROMD.EPROM15.-7的补码用8位二进制数表示为【】A.00000111BB.10000111BC.11111000BD.11111001B16.BCD码00100010B表示的十进制数为【】A.17B.22C.32D.3417.利用INT 21H调用DOS功能,从键盘输入一个字符送入寄存器AL。
河北大学 自动控制原理 考核试题 以及 答案

河 北 大 学 课 程 考 核 试 卷(2005—2006学年第一学期)考核科目 自动控制原理 课程类别 必修 考核方式 闭卷 卷别 A一、简答:(共30分,每小题10分)1、说明闭环控制系统的基本组成,并画出其典型结构方框图。
2、以闭环传递函数 )1)(1()(21++=s T s T s ks G 为例在NYQUIST 图中标出相角稳定裕量和增益稳定裕量。
3、什么叫自持振荡,说明非线性系统中自持振荡与极限环的关系。
二、已知系统结构图如图所示,试画出信号流图,求出系统的传递函数。
(共10分)三、已知反馈系统的闭环传递函数为)105.0)(1()(++=s s s Ks G 。
(共15分)(1)试确定使系统稳定的K 的取值范围。
(10分)(2)若要求系统对于输入r(t)= t 作用下的静态误差e SS ≤0.1,试确定K 的取值范围。
(5分)四、已知最小相位系统闭环对数幅頻特性图如图所示。
(共15分)(1) 画出相应的对数相频特性草图。
(3分(2) 求出其闭环截止角频率ωc 。
(2分) (3) 写出相应的传递函数。
(5分) (4) 若保持系统的静态特性不变,要在 提高系统的相角稳定裕量的同时,增强系统的抗噪能力,应采用何种校正方式 (5分)五、已知系统的闭环传递函数为2)1()(+=Ts s Ks G 绘制负反馈的根轨迹图,并确定使系统稳定的K 值范围。
(共15分)六、某采样控制系统的结构如图所示,已知τ=1.2s ,124)(1+=S s G ,161)(2+=S s G 。
试判断系统的稳定性。
(15分)河 北 大 学 课 程 考 核 试 卷(2005—2006学年第一学期)考核科目 自动控制原理 课程类别 必修 考核方式 闭卷 卷别 A 一、简答:(共30分,每小题10分)3、说明闭环控制系统的基本组成,并画出其典型结构方框图。
2、什么叫稳定裕量,在如下所示的图中标出相角稳定裕量和增益稳定裕量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
河北科技大学自动控制试卷A(2012)
河北科技大学理工学院2012—2013学年第1学期
《自动控制技术》考试试卷A
考场号座位号班级姓名学号
一、建立如图1所示机械系统的微分方程模型。
(10分)
图1
A 卷,共(6)页,第 页
(2)
二、已知系统传递函数2()2
()32
C s R s s s =++,且初始条件为(0)2,(0)1c c •=-=,试求系统在输入()1()r t t =作用下的输出()c t 。
(15分)
三、应用梅逊公式求如图2所示系统的闭环传递函数。
(15分)
A 卷,共(6)页,第 页
(
2)
图2
A 卷,共(6)页,第 页
(2)
四、机器人控制系统结构图如图3所示。
试确定参数值,使系统阶跃响应的峰值时间0.5p t s =,超调量%3%σ=。
(15分)
图3
五、已知最小相位开环系统的渐进对数幅频特性如图4所示,试求:
(1)系统的开环传递函数
(2)利用稳定裕度判断系统稳定性(15分)
A 卷,共(6)页,第 页
(
2)
图4
六、单位反馈系统的开环传递函数为()(3)(5)
K
G s s s s =
++,要求系统特征根的实部
不大于-1,试确定开环增益的取值范围。
(15分)
A 卷,共(6)页,第 页
(2)
七、已知单位反馈系统的开环传递函数为2
7(2)
()(4)(23)
s G s s s s s +=
+++,试分别求出当输入信号()1()r t t =,t 和2t 时系统的稳态误差(()()()e t r t c t =-)。
(15分)。