理论力学第四章 空间力系
理论力学习题册答案

理论力学习题册答案班级姓名学号第一章静力学公理与受力分析(1)一.是非题1、加减平衡力系公理不但适用于刚体,还适用于变形体。
()2、作用于刚体上三个力的作用线汇交于一点,该刚体必处于平衡状态。
()3、刚体是真实物体的一种抽象化的力学模型,在自然界中并不存在。
()4、凡是受两个力作用的刚体都是二力构件。
()5、力是滑移矢量,力沿其作用线滑移不会改变对物体的作用效果。
()二.选择题1、在下述公理、法则、原理中,只适于刚体的有()①二力平衡公理②力的平行四边形法则③加减平衡力系公理④力的可传性原理⑤作用与反作用公理三.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
(a)球A(b)杆AB- 1 -(c)杆AB、CD、整体(d)杆AB、CD、整体(e)杆AC、CB、整体(f)杆AC、CD、整体四.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
(a)球A、球B、整体(b)杆BC、杆AC、整体- 2 -班级姓名学号第一章静力学公理与受力分析(2)一.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
(a)杆AB、BC、整体(c)杆AB、CD、整体CAFAxDBFAyFBWEW(b)杆ABOriginal Figure、BC、轮E、整体FBD of the entire frame(d)杆BC带铰、杆AC、整体- 3 -(e)杆CE、AH、整体(g)杆AB带轮及较A、整体(f)杆AD、杆DB、整体(h)杆AB、AC、AD、整体- 4 -班级姓名学号第二章平面汇交和力偶系一.是非题1、因为构成力偶的两个力满足F= - F’,所以力偶的合力等于零。
()2、用解析法求平面汇交力系的合力时,若选用不同的直角坐标系,则所求得的合力不同。
()3、力偶矩就是力偶。
理论力学L4-4 空间力系简化
c ) 一般主矢和主矩矢既不平行也不垂直 由共点矢量知,它们在同一平面内, 假设两矢量正向夹角为α。 ' FR 1) 将 M O分解为垂直于 ' ' ' 的 及平行于 F M R MO MO O " 的 MO , ' ' O M O 的大小: " FR ' MO M O M O sin
' b) 若主矢平行于主矩:FR // M o
O
MO
' 由一个力和一个力偶(且力 FR 垂直于力偶作用面)组成的
力系,称为力螺旋。 力和力偶都是基本力学量, 力螺旋不能再简化。
力偶矩矢与力矢同方向的称为右螺旋(力偶的转 向与力的方向符合右手关系);反之称左螺旋。 但一般主矢和主矩矢既不平行也不垂直。
§4-4 空间任意力系向一点简化
一、空间任意力系向一点简化 与平面任意力系向一点简化相似,空间任意力 系也是利用力的平移定理将各力平移到简化中 心 O 处,并附加矢量表示的空间力偶,则原力 系与空间汇交力系+空间力偶系等效。
MO m m1 n
F2 F’2
F’R
O
F’n
Fn
F’1 m2
F 又由于力偶矩矢是自由矢量,再将平行于 的 R '' 力偶矩矢 M o 平行移动与FR 重合,成为力螺旋。 一般情况下,空间力系简化结果是一个力螺旋。
约束类型
约束反力
数量
空 间 约 束 类 型 和 约 束 反 力
3
4
5 6
MO
F’R
对于空间汇交力系的合 ' 力FR :
O
' FR 等于该力系各力的矢量和, 称其为该力系的主矢; 对于空间力偶系的合力偶,其力偶矩矢 M O等于 各附加力偶矩的矢量和,也是力系中各力对点O 力矩矢的矢量和: MO mi mO ( Fi ) 称为该力系对简化中心O点的主矩。
理论力学第七版
公理3 (Axiom 3) 加减平衡力系原理(The Principle of Addition or 公理
Subtraction Equilibrium Forces System)
推理1 推理 (Inference 1) 力的可传性(The Principle of Transmissibility) 推理2 推理 (Inference 2) 三力平衡汇交定理(Theorem of Three-force
被约束体
轴可在孔内任意转动, 轴可在孔内任意转动, 也可沿孔的中心线移动, 也可沿孔的中心线移动,但 轴承阻碍轴沿孔径向向外的 约束 位移。 位移。
第一章 静力学公理和物体的受力分析
1-2 约束和约束力 -
1-2 Constraints and Reactions of Constraints 反力方向 过接触点,沿接触面公法线指向轴心。 过接触点,沿接触面公法线指向轴心。 由于轴在孔内可任意转动, 由于轴在孔内可任意转动,故而轴 与孔的接触点位置是不定的。 与孔的接触点位置是不定的。因此反力 的方向一般预先不能确定。 的方向一般预先不能确定。但这样的一 个反力常用两个过轴心的, 个反力常用两个过轴心的,大小未知的 正交分力F 来表示。 正交分力 AX、FAY来表示。此二力指向 可任意假定。 可任意假定。
1-2 约束和约束力 - 约束和约束力(Constraints and Reactions of Constraints)
约束特点 阻碍物体沿接触面法线,并指向约束的运动。 作用点 接触点 反力方向 过接触点,沿接触面公法线,指向被约束物体
第一章 静力学公理和物体的受力分析
1-2 约束和约束力 - 约束和约束力(Constraints and Reactions of Constraints)
理论力学第四章1

Z F
如力F对Z轴之矩表示为: M z ( F ) M o ( Fxy ) Fxy h
力与轴相交或与轴平行(力与轴在同一平面内),力对该轴之矩为零。 方向:右手螺旋法则,与Z轴正方向一致时为正,反之为负。单位:N· m
5
2.力对轴的矩
力对轴之矩合力矩定理:各力对任一轴之矩等于各分力对同一轴之矩的 代数和。 例:将Fxy再分解为Fx、Fy,根据合力矩定理则有:
z
即,力对点的矩矢在过该点的某轴上的投影,等于
力对该轴的矩.
7
空间汇交力系
1、力在直角坐标轴上的投影 直接投影法
Fx F cos
Fy F cos
Fz F cos
8Leabharlann 1.力在直角坐标轴上的投影 二次投影法 Fz Fy Fx
F xy F sin
Fx F sin cos
1、 力对点的矩以矢量表示 ——力矩矢 三要素: (1)大小:力F与力臂的乘积 (2) 方向:转动方向 (3) 作用面:力矩作用面.
MO ( F ) r F
(4–8)
矢量方向:右手螺旋定则。(将右手四指握拳并以它们的弯曲 方向表示力使物体绕该轴转动的转向,而拇指的指向就是力对 3 点之矩矢量的指向)
3. 空间汇交力系的平衡:
空间汇交力系平衡的充要条件是:力系的合力为零
即: R F
F
x 2
i
0
2 2
FR
F
Fy Fz
空间汇交力系的平衡方程
F 0 F 0 Fz 0
x y
11
§4-2
空间力偶系
M mi 代数和
1.平面力偶系:
理论力学 第四章 空间力系

r FR = 0
∑F = 0
x
∑F = 0
y
称为空间汇交力系的平衡方程. 称为空间汇交力系的平衡方程. 空间汇交力系平衡的充要条件:该力系中所有 空间汇交力系平衡的充要条件: 充要条件 各力在三个坐标轴上的投影的代数和分别为零. 各力在三个坐标轴上的投影的代数和分别为零.
例 题 1
求: 绳的拉力和墙体的约束反力 。
=
=
F = F′ = F2 1 1
= F2′ = F3 = F3′
= =
定位矢量 滑移矢量 自由矢量 力偶矩矢是自由矢量 力偶矩相等的力偶等效 (5)力偶没有合力,力偶只能由力偶来平衡. 力偶没有合力,力偶只能由力偶来平衡.
3.空间力偶系的合成与平衡条件
=
=
r r r r r r r r r M 1 = r1 × F1 , M 2 = r2 × F2 ,......, M n = rn × Fn
A
P
c a y
i
j k
O
MO ( P ) = r × P = 0 b 0 0 0 P = Pbi
(2)利用力矩关系
x
α
b
M OA ( P ) = M O ( P ) cos α = Pab a 2 + b2 + c 2
MO(P)
例 题 4
已知:OA=OB=OC =b, OA⊥OB⊥OC. 已知: 求: F 对OA边的中点 之矩在 方向的投影。 边的中点D之矩在 方向的投影。 力 边的中点 之矩在AC方向的投影
3、力对点的矩与力对过该点的轴的矩的关系 r r r r M x ( F ) = M x ( Fx ) + M x ( Fy ) + M x ( Fz ) = Fz ⋅ y − Fy ⋅ z
《理论力学》第四章-力系平衡试题及答案
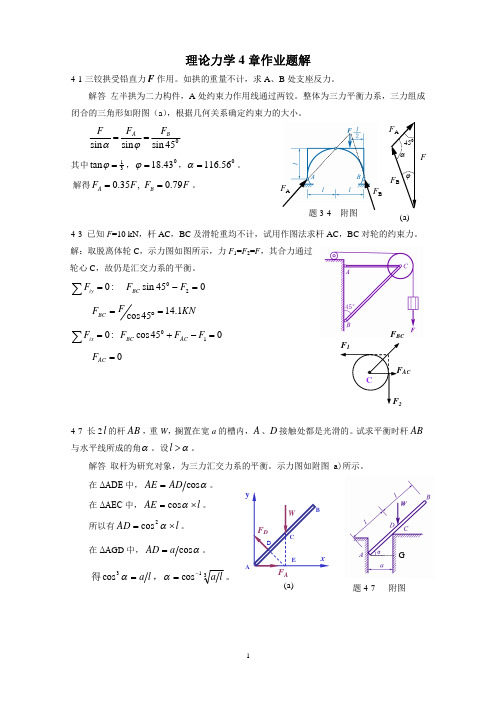
理论力学4章作业题解4-1三铰拱受铅直力F 作用。
如拱的重量不计,求A 、B 处支座反力。
解答 左半拱为二力构件,A 处约束力作用线通过两铰。
整体为三力平衡力系,三力组成闭合的三角形如附图(a ),根据几何关系确定约束力的大小。
45sin sin sin B A F F F ==j a其中31tan =j ,043.18=j ,056.116=a 。
解得F F F F B A 79.0 ,35.0==。
4-3 已知F =10 kN ,杆AC ,BC 及滑轮重均不计,试用作图法求杆AC ,BC 对轮的约束力。
解:取脱离体轮C ,示力图如图所示,力F 1=F 2=F ,其合力通过轮心C ,故仍是汇交力系的平衡。
:0=åiyF 045sin 20=-F F BCKN FF BC 1.1445cos =°=045cos :010=-+=åF F F FAC BC ix0=AC F4-7 长2l 的杆AB ,重W ,搁置在宽a 的槽内,A 、D 接触处都是光滑的。
试求平衡时杆AB 与水平线所成的角a 。
设a >l 。
解答 取杆为研究对象,为三力汇交力系的平衡。
示力图如附图(a)所示。
在ΔADE 中,a cos AD AE =。
在ΔAEC 中,l AE ´=a cos 。
所以有l AD ´=a 2cos 。
在ΔA GD 中,a cos a AD =。
得a =a 3cos ,31cosl a -=a 。
F BCAC题3-4 附图F BF AF BF AFa45j(a)A (a)题4-7 附图G4-9 AB ,AC ,AD 三连杆支撑一重物,如图所示。
已知W=10kN ,AB =4m ,AC =3 m ,且ABEC 在同一水平面内,试求三连杆所受的力。
解:取铰A 研究,示力图如图示,为汇交力系的平衡。
0=åix F : 05430sin =´°+AD AB F F 0=åiy F : 05330sin =´°+AD AC F F 0=åiZF: 030cos =-°W F AD联立求解KNF KNF KN F AD AC AB 5.115.36.4=-=-=4-8 图示结构上作用一水平力F 。
理论力学 chap4
M y M iy M 2 80 N m
M z M iz M 1 M 4 cos 45 M 5 cos 45 193 .1N m
M M ix i M iy j M iz k
例 已知: F1 = 10kN,F2 = 16kN, F3 = 20kN,a=10cm .求力系的合力偶。
2 2 2
力F 对原点O之矩方向余弦:
Mx cos( M O , i ) 0.845 MO
My cos( M O , j ) 0.531 MO Mz cos( M O , k ) 0.064 MO
M O M x M y M z 124 .3 N m
§4-3 空间力偶系 1 空间力偶的概念
F Fx Fy Fz
2 2 2
cos( F , i )
Fx F
解题时究竟用哪种 方法求力的投影?
例1 半径r的斜齿轮,其上作用力F,如图所示。求力在坐标 轴上的投影。
解: Fx Ft F cos sin
FY Fa F cos cos
Fz Fr F sin
Fxy Fxy
F
o d
M z ( F ) M O ( Fxy )
(1)定义
M z dFxy
力对轴之矩的绝对值等于该力在与轴垂直的 平面上的投影对轴与平面交点之矩。
如何求力对轴之矩?
力对轴之矩是代数量,并按右手规则 确定其正负号。
力与轴平行或相交时力对该轴的矩等于零
(1)合力之矩定理
合力对任一点之矩矢等于力系中各力 对该点之矩矢的矢量和;合力对任一轴之 矩等于力系中各力对该轴之矩的代数和。
理论力学作业答案
解:力系对O点的主矩在轴上的投影为
M Ox M x F F2 cos a .100 F3 sin .300 51.8 N .m M Oy M y F F1 .200 F2 sin a .100 36.64 N .m M Oz M z F F2 cos a .200 F3 cos .300 103.6 N .m
FCy
P1
FDx
解得: FCy 4550 N
P
3、研究杆ABC
FCy
C
M F F
y
C
0
M A 6FAx 3FBx 0 0
B
FCx
FBy
FAy FBy FCy P3 0
x
0
FBx
FAx FBx FCx 0
MA P3 FAy
A
解得: FBx 22800, FBy 17850
M M FAx tan , FAy , M A M a a
3-9(b)
已知:q, M, a,. 不计梁自重,求支座A、B、C约束反力。 FNC FBy FBx
解:BC段梁受力分析如图,平面任意力系平衡方程为
F F
解得:
FNC
x y
0 FBx FNC sin 0 0 FBy qa FNC cos 0
解得: FAx 0, FAy 1 F M , FNB 1 3F M 2 a 2 a
3-5(b)
已知:F, M, q, a, 求支座A、B约束反力。
q
M
解:梁受力分析如 图,平面任意力系 平衡方程为
FAx
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录
第四章 空间力系\力对轴之矩及其计算 【解】 1)计算力F在x、y、z轴上的投影。 利用二次投影法进行计算。力F在Oxy平面上的投影的大小为 Fxy=Fcos30 再将Fxy向x、y轴上投影,得 X=-Fxycos45=-Fcos30cos45=-122.5N Y=-Fxycos45=-F cos30cos45 =-122.5N 力F在z轴上的投影为 Z=Fsin30=100 N 2)计算力F对x、y、z轴之矩。 力F与z轴相交,它对z轴之矩等于零 Mz(F)=0 在计算力F对x、y轴之矩时利用合力矩定理。将力F分解为分力 Fxy和Fz,因分力Fxy与x、y轴都相交,它对x、y轴之矩都为零,故 Mx(F)=Mx(Fxy)+Mx(Fz)= Mx(Fz)=Fz×2m=200N· m My(F)=My(Fxy)+My(Fz)= My(Fz)=-Fz×2m=-200N· m 目录
目录
第四章 空间力系\空间力系的平衡方程及其应用 【解】 取起重机连同重物为研究对象, 作用于其上的力有起重机的重力W和重 物的重力F,以及地面对三个轮子的反力 FA、FB、和FC,这五个力组成一个空间 平行力系。列出平衡方程 FA a FA a sin 60 W sin 60 Fl cos30 0 3 得 FA=12.3kN a a M y 0 FB FC Fl sin 30 0 2 2 Z=0 FB+ FC+ FAWF=0 目录
合力的作用点称为物体的重心,合力的大小称为物体的重量。
目录
第四章 空间力系\重心和形心
4.4.2 重心坐标公式
为了确定物体重心的位置,可将 它分为许多微小部分(设为n个),设 任一微小部分Mi的重力为Wi,物体的 重力为W。建立直角坐标系Oxyz(如 图),设物体重心C的坐标为xC、yC、 zC,各微小部分重心的坐标为xi、yi、zi、。根据合力矩定理可知,
第四章 空间力系
4.1 4.2 4.3 4.4 力在空间直角坐标轴上的投影及其计算 力对轴之矩及其计算 空间力系的平衡方程及其应用 重心与形心
返回
第四章 空间力系\力在空间直角坐标轴上的投影及其计算
4.1 力在空间直角坐标轴上的投影及其计算
根据力在坐标轴上投影 的定义,力在空间直角坐标 轴上的投影有以下两种计算 方法。 1.一次投影法 若已知力F与空间直角坐 标轴x、y、z正向的夹角、、 ,则力F在三个坐标轴上的 投影分别为 X F cos Y F cos Z F cos 目录
第四章 空间力系\力对轴之矩及其计算 2. 合力矩定理 空间力系的合力对某一轴之矩等于力系中各力对同一轴之矩的代 数和,即 Mz(FR)=Mz(F1)+Mz(F2)+…+Mz(Fn)=∑Mz(F)
目录
第四章 空间力系\力对轴之矩及其计算 【例4.1】 正方形板ABCD用球铰A和铰链B与墙壁连接,并用 绳索CE拉住使其维持水平位置。已知绳索的拉力F=200N,求力F在 x、y、z轴上的投影及对x、y、z轴之矩。
X Y Z cos , cos , cos F F F F X 2 Y2 Z2
目录
第四章 空间力系\力对轴之矩及其计算
4.2 力对轴之矩及其计算
1. 力对轴之矩的概念 以图示的门为例。设力F作用于门
上的A点,为了研究力F使门绕z轴转动 的效应,可将它分解为与转轴z平行的 分力Fz和位于通过A点且垂直于z轴的 平面上的分力Fxy。由经验可知,无论 分力Fz的大小如何,均不能使门绕z轴
2 5 W 0 得 F1 W 2 5 1 1 X 0 F2 F3 0 得 F2 F3 2 2 1 1 1 X 0 F3 F2 F1 0 2 2 5 F1
得 F1 2 W F2 F3 5 2 2 2
目录
负号表示F2、F3实际上是拉力。
第四章 空间力系\空间力系的平衡方程及其应用
4.3 空间力系的平衡方程及其应用
空间任一物体的运动,一般地既有沿空间直角坐标系三个坐标 轴方向的移动,又有绕三个坐标轴的转动。若物体在空间力系作用 下保持平衡,则物体既不能沿三个坐标轴方向移动,也不能绕三个 坐标轴转动。因此,空间力系平衡的必要和充分条件:各力在三个 坐标轴上投影的代数和以及各力对三个坐标轴之矩的代数和均应等 于零。空间力系的平衡方程为
式中:d——分力Fxy所在的平面与z轴的交 点O到力Fxy作用线的垂直距离。正负号表 示力使物体绕z轴转动的方向,按右手螺 旋法则确定,即将右手四指的弯曲方向表 示力F使物体绕z轴转动的方向,大拇指的 指向如与z轴的正向相同时取正,反之取负 (如图)。 显然,当力F与z轴平行(此时Fxy=0)或者相交(此时d=0)时, 力F对z轴之矩为零。 力对轴之矩的单位是Nm。 目录
转动;而能使门转动的只是分力Fxy,故力F使门绕z轴转动的效应等
于其分力Fxy使门绕z轴转动的效应。而分力Fxy使门绕z轴转动的效 应可用分力Fxy对O点之矩来表示(O点是分力Fxy所在平面和z轴的交 点)。 目录
第四章 空间力系\力对轴之矩及其计算 由此可见,力使物体绕某轴转动的效应可用此力在垂直于该轴 的平面上的分力对此平面与该轴的交点之矩来度量。我们将该力矩 称为力对轴之矩。如将力F对z轴之矩表示为Mz(F)或简记为Mz,则 有 Mz=Fxy d
图示用钢绳起吊一块矩形混 凝土预制板,板的重力W和绳的 拉力F1、F2、F3、F4组成一空间 力系。
返回
第四章 空间力系
作用于传动轴的带轮C上的拉力FT1、FT2,斜齿轮D上的力Ft、 Fr、Fa,轴承A、B处的反力FAx、FAy、FAz和FBx、FBz,这些力组成
空间力系。
返回
第四章 空间力系
X 0, Y 0, Z 0, M 0, M 0, M 0
x y z
空间力系有六个独立的平衡方程,可以求解六个未知量。
目录
第四章 空间力系\空间力系的平衡方程及其应用 若空间力系中所有各力的作 用线均汇交于一点,则称为空间 汇交力系(如图)。空间汇交力 系的平衡方程为 ΣX=0 ΣY=0 ΣZ=0
目录
第四章 空间力系\空间力系的平衡方程及其应用 【例4.4】 图示悬臂刚架上作用有q = 2 kN/m的均布荷载,以及 作用线分别平行于x轴、y轴的集中力F1、F2。已知F1 = 5 kN,F2 = 4 kN,求固定端A处的反力和反力偶。 【解】 取悬臂刚架为研究对象,画 出受力图。列出平衡方程 X=0 FAx+F1=0 Y=0 FAy+F2=0 Z=0 FAz-q×4m=0 Mx=0 MAx-F2×4m-q×4m×2m=0 My=0 MAy+F1×5m=0 ∑Mz=0 MAz-F1×4m=0 解得 FAx=-5kN,FAy=-4kN,FAz=8kN ,MAx=32kN· m , MAy= -25kN· m ,MAz=20kN· m 目录
速度为g,则将Wi=mig、W=mg代入重心坐标公式,可得
xC
mx ,
i i
m
yC
my ,
i i
m
zC
mz m
i i
由上式确定的C点称为物体的质心。在均匀重力场内,物体的 质心与重心的位置相重合。在重力场之外,物体的重心消失,而质 心依然存在。质心的概念将在动力学中用到。
目录
空间汇交力系有三个独立的平衡方程,可求解三个未知量。
目录
第四章 空间力系\空间力系的平衡方程及其应用 若空间力系中所有各力的 作用线互相平行,则称为空间 平行力系(如图)。空间平行力 系的平衡方程为
ΣZ 0 Σ M x 0 Σ M y 0
空间平行力系有三个独立的平衡方程,可求解三个未知量。 求解空间力系平衡问题的步骤与平面力系相同,即选取研究对 象、画受力图、列平衡方程和解方程等四步。 在画受力图时涉及约束力,现将空间常见约束和它们的约束力 列成表3.1,以供参考。 目录
Wz C W1z1 W2 z2 Wn zn Wi zi
由以上三式可得计算物体 重心坐标的公式,即
xC
Wx ,y
i i
zC
W Wi zi W
C
Wy
i
i
W
,
目录
第四章 空间力系\重心和形心
4.4.3 质心的概念
若设物体各微小部分和整个物体的质量分别为mi、m,重力加
第四章 空间力系\重心和形心
4.4.4 几何体、面、线的形心
对于均质物体,若用表示物体每单位容积的重量,Vi表示各微
小部分的体积,V表示整个物体的体积,则Wi=Vi以及 W=ΣWi=ΣVi=V, 代入重心坐标公式,得
应当指出,力在轴上的投影是代数量,而力在平面上的投影是 矢量。这是因为力在平面上的投影与方向有关,故须用矢量来表示。 目录
第四章 空间力系\力在空间直角坐标轴上的投影及其计算
若已知力F在直角坐标轴上的投影X、Y、Z,则可将其表示为
F Xi Yj Zk
式中:i、j、k——x、y、z轴的单位矢量。 力F的大小和方向余弦分别为
第四章 空间力系
第四章 空间力系
本章在介绍力在空间直角坐标轴上的投影以及力对轴之矩的概 念和计算的基础上,直接给出空间力系的平衡方程,着重于应用平 衡方程求解空间力系的平衡问题。最后介绍物体重心的概念以及确 定重心位置和均质物体形心的方法。
返回第四章 空间力系第四 Nhomakorabea 空间力系
各力的作用线不在同一个平面内的力系称为空间力系。
第四章 空间力系\空间力系的平衡方程及其应用 表3.1 常见空间约束的类型及约束力
目录
第四章 空间力系\空间力系的平衡方程及其应用 【例4.2】 用三根连杆支承一重W的物体,求每根连杆所受的力。 【解】 取结点A为研究对象,假设 F1、F2、F3都是压力。建立坐标系如 图所示。列出平衡方程