【CN110000802A】一种向心闭合式夹持机械爪【专利】
一种机械夹爪[发明专利]
![一种机械夹爪[发明专利]](https://img.taocdn.com/s3/m/73392a6e680203d8cf2f24c0.png)
专利名称:一种机械夹爪
专利类型:发明专利
发明人:王玥瀚
申请号:CN201810976658.4申请日:20180825
公开号:CN108748243A
公开日:
20181106
专利内容由知识产权出版社提供
摘要:本发明涉及机械制造领域,特别涉及一种机械夹爪,包括外壳和安装在外壳内部并自上而下设置的电磁铁、活动杆、活塞、机械爪,电磁铁上设置有驱动电磁铁与电磁铁滑槽的顶部抵接的复位装置,活塞与活塞滑槽滑动配合,机械爪包括有一对对称设置的L型连杆和安装在L型连杆一端的电磁铁夹块,外壳朝向机械爪的方向设有上下与左右均对称设置的四个连接杆,连接杆的末端安装有转轴,转轴设于长圆孔内部并且与长圆孔的内壁两侧均抵接,活塞为导磁材料,外壳、活动杆和机械爪为非导磁材料,该机械爪能够在任意角度迅速的张合,并且机械手的末端在任何情况下均与工件表面贴合,还可以通过电磁吸力增强机械爪的夹持力。
申请人:王玥瀚
地址:239299 安徽省滁州市来安县新安镇东大街50号301室
国籍:CN
更多信息请下载全文后查看。
【CN209887610U】一种向心闭合式夹持机械爪【专利】
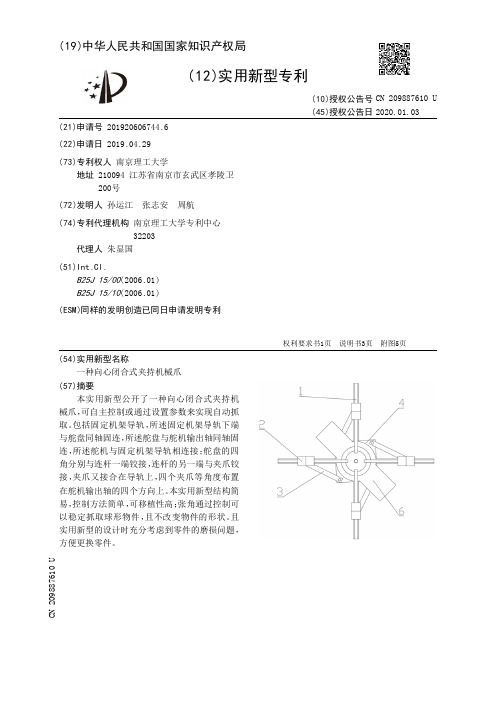
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920606744.6(22)申请日 2019.04.29(73)专利权人 南京理工大学地址 210094 江苏省南京市玄武区孝陵卫200号(72)发明人 孙运江 张志安 周航 (74)专利代理机构 南京理工大学专利中心32203代理人 朱显国(51)Int.Cl.B25J 15/00(2006.01)B25J 15/10(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种向心闭合式夹持机械爪(57)摘要本实用新型公开了一种向心闭合式夹持机械爪,可自主控制或通过设置参数来实现自动抓取。
包括固定机架导轨,所述固定机架导轨下端与舵盘同轴固连,所述舵盘与舵机输出轴同轴固连,所述舵机与固定机架导轨相连接;舵盘的四角分别与连杆一端铰接,连杆的另一端与夹爪铰接,夹爪又接合在导轨上,四个夹爪等角度布置在舵机输出轴的四个方向上。
本实用新型结构简易,控制方法简单,可移植性高;张角通过控制可以稳定抓取球形物件,且不改变物件的形状。
且实用新型的设计时充分考虑到零件的磨损问题,方便更换零件。
权利要求书1页 说明书3页 附图5页CN 209887610 U 2020.01.03C N 209887610U权 利 要 求 书1/1页CN 209887610 U1.一种向心闭合式夹持机械爪,其特征在于:包括舵机固定架(6)、舵盘(4)、舵机(5)、P 根导轨(1)、M个夹爪(2)和N根连杆(3),P=N=M,M≥3;舵机固定架(6)包括底板和两块侧板,两块侧板对称固定在底板的底面两侧,舵机(5)固定在两块侧板上;舵机固定架(6)的底板和舵机(5)之间设有舵盘(4),舵机(5)的输出轴与舵盘(4)的中心固连;P根导轨(1)均匀分布在底板顶面,导轨(1)一端固定在底板上,另一端伸出底板,每根导轨(1)上设有一个夹爪(2),N根连杆(3)均匀分布在舵盘(4)上,每根连杆(3)一端与舵盘(4)转动连接,另一端与夹爪(2)转动连接,工作时通过舵机(5)带动舵盘(4)和连杆(3)运动,进而带动夹爪(2)同步做向心或离心运动。
夹持机械手[实用新型专利]
![夹持机械手[实用新型专利]](https://img.taocdn.com/s3/m/6142d625da38376bae1fae0e.png)
专利名称:夹持机械手
专利类型:实用新型专利
发明人:王蔡岳,陈倩,徐泽,陈方迎申请号:CN201821457328.6申请日:20180906
公开号:CN208729818U
公开日:
20190412
专利内容由知识产权出版社提供
摘要:本实用新型涉及一种夹持机械手,驱动气缸的驱动杆向上缩回能够使得两个摇杆筒的下端相互靠近而收拢,夹持爪的滑动杆与摇杆筒的内孔滑动配合,所以,两个夹持爪的滑动杆分别受两个摇杆筒的驱动而使两个夹持指相互靠近而能够夹紧物品;由于摇杆筒与滑动杆配合长度较大且为滑动配合,所以,两个夹持指能够平稳地运动且产生较大的夹持力而夹紧物品;此外,由于在夹持指的内侧设置有多个弹性块,在夹持指夹持物品时,弹性块与物品接触,弹性块能够弹性变形,这样就不会损坏物品。
由此可见,本实用新型的一种夹持机械手能够提供较大的弹性力夹紧物品,而且能够避免物品被夹坏。
申请人:蔡恩来
地址:318000 浙江省台州市临海市汛桥镇汛东村2-32号
国籍:CN
代理机构:上海精晟知识产权代理有限公司
代理人:冯子玲
更多信息请下载全文后查看。
一种夹爪[实用新型专利]
![一种夹爪[实用新型专利]](https://img.taocdn.com/s3/m/ce02e3b53b3567ec112d8a34.png)
专利名称:一种夹爪
专利类型:实用新型专利
发明人:计圣勇,吴跃新
申请号:CN201921790431.7申请日:20191023
公开号:CN212421343U
公开日:
20210129
专利内容由知识产权出版社提供
摘要:本实用新型涉及夹爪技术领域,特别是应用于机器人的一种夹爪,其包括径向夹紧装置,所述的径向夹紧装置包括沿圆周均布形成围合状的若干夹指,其特征在于,还包括设在若干夹指内的轴向夹紧装置。
本实用新型与现有技术相比,除了径向夹紧装置外,其还设有轴向夹紧装置,保证搬运过程中,分体式轴承的零件不散落,并可兼容多种类型轴承的装配。
申请人:昆山源博信予智能装备有限公司
地址:215300 江苏省苏州市昆山市玉山镇晨丰路238号昆山美国工业村第18号厂房
国籍:CN
代理机构:上海宣宜专利代理事务所(普通合伙)
代理人:刘洁瑜
更多信息请下载全文后查看。
夹爪[发明专利]
![夹爪[发明专利]](https://img.taocdn.com/s3/m/5976be0b524de518974b7d93.png)
专利名称:夹爪
专利类型:发明专利
发明人:陈晓强,李小凤,姜瑞,张俊鹏,刘苗,高月波,张林健,邵茂峰,梁丽娟,张鹏,高云峰
申请号:CN201711329105.1
申请日:20171213
公开号:CN108189070A
公开日:
20180622
专利内容由知识产权出版社提供
摘要:本发明提供一种夹爪,其包括底盖板、固定在底盖板上的掌骨架、固定在掌骨架上的叉指盖、以及相对设置的两个夹持装置;还包括位于所述掌骨架内的且相对啮合的两个动齿条和扇齿轮;每个夹持装置包括与所述掌骨架枢接的基指节、与对应扇齿轮连接的齿轮臂、与所述齿轮臂枢接的中指板、均与所述基指节和中指板连接的指尖节、以及与所述指尖节连接的指尖板,两个夹持装置的指尖板可将物体平行夹持、环抱夹持以及内扩夹持。
本发明夹爪可适用于进行环抱夹持、平行夹持劲和内扩夹持物体,本可适应性仿指夹爪能完成不同工作要求的夹持要求;极大的发挥机械夹具夹持动作的多种方式,具有较高的仿人手指,具有较大的单位质量的带负载能力。
申请人:大族激光科技产业集团股份有限公司,深圳市大族电机科技有限公司
地址:518000 广东省深圳市南山区深南大道9988号
国籍:CN
代理机构:深圳市道臻知识产权代理有限公司
代理人:陈琳
更多信息请下载全文后查看。
一种伸缩式机械手爪[实用新型专利]
![一种伸缩式机械手爪[实用新型专利]](https://img.taocdn.com/s3/m/a5be4399d0f34693daef5ef7ba0d4a7302766cd5.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201922278694.6(22)申请日 2019.12.18(73)专利权人 山东科技大学地址 266590 山东省青岛市经济技术开发区前湾港路579号(72)发明人 王宝仁 李加春 时强 (51)Int.Cl.B23Q 7/04(2006.01)B25J 15/08(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种伸缩式机械手爪(57)摘要本实用新型公开一种伸缩式机械手爪,包括直线驱动器1、传动杆2、支架3、导杆4、压缩弹簧5、卡爪基座6、斜锲7、滚子8、拉伸弹簧9、卡爪10等。
所述支架3上安装有直线驱动器1和导杆4,所述导杆4一端安装有卡爪基座6,所述直线驱动器1的输出轴通过传动杆2与斜楔7连接,所述卡爪基座6上安装有卡爪10,所述卡爪10上安装有拉伸弹簧9和滚子8,所述斜楔7可以通过滚子8推动卡爪10,所述支架3和卡爪基座6之间安装有压缩弹簧5。
所述伸缩式机械手爪采用一个原动部件实现了卡爪开合与机械手伸缩两个自由度的运动,使机械手的结构更加简洁紧凑,可用于各类机床的自动上下料等生产过程。
权利要求书1页 说明书3页 附图1页CN 211387906 U 2020.09.01C N 211387906U1.一种伸缩式机械手爪,其特征在于,所述伸缩式机械手爪包括支架,所述支架上安装有直线驱动器和导杆,所述导杆一端安装有卡爪基座,所述直线驱动器的输出轴通过传动杆与斜楔连接,所述卡爪基座上安装有卡爪,所述卡爪上安装有拉伸弹簧和滚子,所述斜楔可以通过滚子推动卡爪,所述支架和卡爪基座之间安装有压缩弹簧。
2.根据权利要求1所述的一种伸缩式机械手爪,其特征在于所述卡爪的开合与所述卡爪基座的伸缩只用一个原动部件驱动。
3.根据权利要求1所述的一种伸缩式机械手爪,其特征在于可以通过调整直线驱动器输出力的大小来调整卡爪的夹紧力。
一种多功能机械爪[实用新型专利]
专利名称:一种多功能机械爪
专利类型:实用新型专利
发明人:冯宝林,徐良玮,刘宜,高磊,党品艺,刘丰权,王大朋,吴宝元,王儒敬,郭红燕
申请号:CN202220564611.9
申请日:20220314
公开号:CN216830916U
公开日:
20220628
专利内容由知识产权出版社提供
摘要:本实用新型涉及机械爪技术领域,具体是涉及一种多功能机械爪,包括底板和抓取机构;抓取机构在底板上,抓取机构包括抓取组件、第一直线驱动器、导向组件、放置板、吸附头和吸盘;第一直线驱动器固定设置在底板上;导向组件固定设置在第一直线驱动器输出轴的一侧;放置板固定设置在导向组件远离第一直线驱动器的一端上;吸附头固定设置在放置板上;吸盘设置在吸附头远离放置板的一端上;抓取组件固定设置在第一直线驱动器的输出端上。
本申请通过设置抓取组件、第一直线驱动器、导向组件、放置板、吸附头和吸盘,实现了机械爪可以对多种形状的待夹取件进行夹取的技术要求。
申请人:中科合肥智慧农业协同创新研究院
地址:230031 安徽省合肥市长丰县双凤开发区金江路32号合肥智慧农业协同创新研究院
国籍:CN
代理机构:合肥国和专利代理事务所(普通合伙)
代理人:曹青
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910355050.4
(22)申请日 2019.04.29
(71)申请人 南京理工大学
地址 210094 江苏省南京市玄武区孝陵卫
200号
(72)发明人 孙运江 张志安 周航
(74)专利代理机构 南京理工大学专利中心
32203
代理人 朱显国
(51)Int.Cl.
B25J 15/00(2006.01)
B25J 15/10(2006.01)
(54)发明名称
一种向心闭合式夹持机械爪
(57)摘要
本发明公开了一种向心闭合式夹持机械爪,
可自主控制或通过设置参数来实现自动抓取。
包
括固定机架导轨,所述固定机架导轨下端与舵盘
同轴固连,所述舵盘与舵机输出轴同轴固连,所
述舵机与固定机架导轨相连接;舵盘的四角分别
与连杆一端铰接,连杆的另一端与夹爪铰接,夹
爪又接合在导轨上,四个夹爪等角度布置在舵机
输出轴的四个方向上。
本发明结构简易,控制方
法简单,可移植性高;张角通过控制可以稳定抓
取球形物件,且不改变物件的形状。
且发明的设
计时充分考虑到零件的磨损问题,方便更换零
件。
权利要求书1页 说明书3页 附图5页CN 110000802 A 2019.07.12
C N 110000802
A
权 利 要 求 书1/1页CN 110000802 A
1.一种向心闭合式夹持机械爪,其特征在于:包括舵机固定架(6)、舵盘(4)、舵机(5)、P 根导轨(1)、M个夹爪(2)和N根连杆(3),P=N=M,M≥3;
舵机固定架(6)包括底板和两块侧板,两块侧板对称固定在底板的底面两侧,舵机(5)固定在两块侧板上;舵机固定架(6)的底板和舵机(5)之间设有舵盘(4),舵机(5)的输出轴与舵盘(4)的中心固连;P根导轨(1)均匀分布在底板顶面,导轨(1)一端固定在底板上,另一端伸出底板,每根导轨(1)上设有一个夹爪(2),N根连杆(3)均匀分布在舵盘(4)上,每根连杆(3)一端与舵盘(4)转动连接,另一端与夹爪(2)转动连接,工作时通过舵机(5)带动舵盘(4)和连杆(3)运动,进而带动夹爪(2)同步做向心或离心运动。
2.根据权利要求1所述的向心闭合式夹持机械爪,其特征在于:导轨(1)的截面为T形、楔形或工字型,减小高度方向上的形变量,保证夹爪(2)在导轨(1)上滑动的稳定。
3.根据权利要求1所述的向心闭合式夹持机械爪,其特征在于:夹爪(2)的根部设有与导轨(1)截面形状匹配的通孔,头部呈楔形。
4.根据权利要求1所述的向心闭合式夹持机械爪,其特征在于:位于舵机固定架(6)上的P根导轨(1)的端部通过固定块使得相邻的两根导轨(1)之间连接,固定块并与舵机固定架(6)连接。
5.根据权利要求1所述的向心闭合式夹持机械爪,其特征在于:N根连杆(3)的运动轨迹共面。
2。