电动阀门智能控制器说明书
海林自控科技电动调节阀执行器说明书

电动调节阀执行器说明书Electric Valve Actuatorsfa⏹ 三位浮点型,采用AC24V 或AC220V 电源; ⏹ 比例调节型,采用AC24V 或AC220V 电源;▪ DC 0(2)~10V 控制信号▪ DC (0)4~20mA 控制信号(定位器阻抗250Ω) ▪ DC 0(2)~10V 反馈信号▪DC (0)4~20mA 反馈信号(带载能力≤500Ω)⏹ 比例调节型,具有一键自适应阀门零满点功能;⏹ 比例调节型,可以通过拨码开关来设置,现场手动控制或者远程自动控制;⏹ 比例调节型,可以通过拨码开关可以实现,断开控制信号时阀门全开、全闭或保持不动; ⏹ 选配功能:▪ 极限位置无源点; ▪ 2K 或10K 电位器反馈; ▪ 手动设置零点、满点;⏹ 控制精度: 基本误差±3%;死区±3%;⏹ 环境: -10~50℃;1%-90%RH 不结露;无腐蚀性气体;机械振动小于1g ;防护等级 IP54。
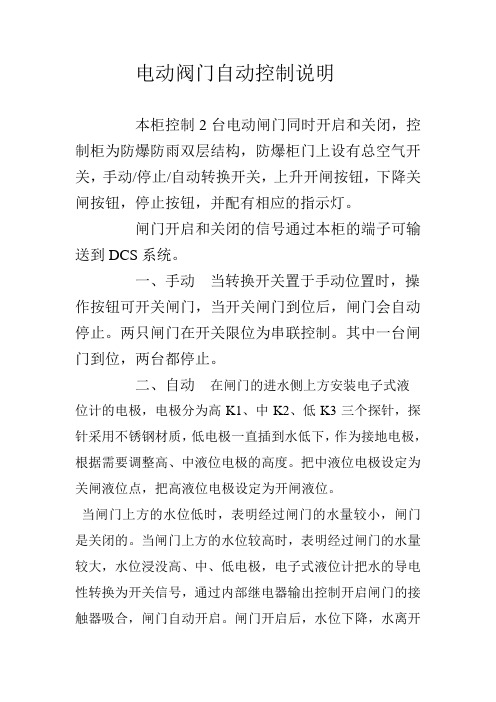
型号及规格ETF …10/15系列 ETF …18/30系列额定力:ETF …10 1000N 额定行程:22mm ETF …15 1500N 额定行程:22mm ETF …18 1800N 额定行程:25mm ETF …30 3000N 额定行程:50mm控制方式: 三位浮点型比例调节型执行器装配示意图图1: 首先把阀杆拉出到阀体的最上点;图2: 将执行器上的U 型螺栓取下,再将执行器轴上的卡子松开,把执行器轴和阀杆对顶后,一起向下压,使执行器下部落到阀体安装平面上;图3: 把U 型螺栓穿上去,将两个M8螺母拧紧,螺母拧紧扭矩MAX=16Nm ,再把执行器轴和阀杆进行连接,确认执行器轴和阀杆对顶无间隙,用卡子将执行器轴和阀杆夹上,要注意卡子的正反方向(卡子的缺口应该卡在执行器轴的部位),然后把两个M6x16螺钉拧紧。
使用工具:S=5mm 的内六角扳手图4: 装配完毕后,把执行器支架上的两个指示环(红色、蓝色各一个),并紧到指针位置,这样执行器和调节阀体的装配就完成了。
电动阀门自动控制说明
电动阀门自动控制说明本柜控制2台电动闸门同时开启和关闭,控制柜为防爆防雨双层结构,防爆柜门上设有总空气开关,手动/停止/自动转换开关,上升开闸按钮,下降关闸按钮,停止按钮,并配有相应的指示灯。
闸门开启和关闭的信号通过本柜的端子可输送到DCS系统。
一、手动当转换开关置于手动位置时,操作按钮可开关闸门,当开关闸门到位后,闸门会自动停止。
两只闸门在开关限位为串联控制。
其中一台闸门到位,两台都停止。
二、自动在闸门的进水侧上方安装电子式液位计的电极,电极分为高K1、中K2、低K3三个探针,探针采用不锈钢材质,低电极一直插到水低下,作为接地电极,根据需要调整高、中液位电极的高度。
把中液位电极设定为关闸液位点,把高液位电极设定为开闸液位。
当闸门上方的水位低时,表明经过闸门的水量较小,闸门是关闭的。
当闸门上方的水位较高时,表明经过闸门的水量较大,水位浸没高、中、低电极,电子式液位计把水的导电性转换为开关信号,通过内部继电器输出控制开启闸门的接触器吸合,闸门自动开启。
闸门开启后,水位下降,水离开高、中电极,液位计内部继电器的开关断开,其常闭触点控制控制关闭闸门的接触器吸合,闸门自动关闭。
闸门自动控制系统需在闸门进水侧上方设置液位电极,它的控制开关信号关到远方的防爆闸门控制柜。
控制柜可通过选择开关设定,电动闸门可进行“手动/检修/自动”控制,当开关置于手动位置时,由控制柜上开闸、关闸、停止按钮进行控制,当开关置于自动位置时,由闸门的水位控制闸门开关。
本柜控制输入电压为380V/220V,220V作为本柜的控制电源。
本柜控制功率为总共1.5KW。
本柜没有漏电开关,安装使用时要注意安全,一定要做好保护接地。
切不可大意!!!!。
多转电动阀门控制器说明书

AOTS AUXILIARY OPEN TORQUE SWITCH
41 40 39
42
43
19 18 17
38
20
16
C
44 21
09
08
15 37
OTS OPEN TORQUE SWITCH
ACLS AUXILIARY CLOSE LIMIT SWITCH
CLS CLOSE LIMIT SWITCH
3
2 MIDDLE TRAVEL SWITCHES DPDT CONTACT, AND VISUAL INDICATION DISC
2
3
4
ISSUE
A
FIRST PRODUCTION RELEASE
DATE
ISSUE
18-07-19 C
-
DATE
-
B
MODIFY SHEET 2 NOTES 5 (3A BY 0.25A).
AOLS AUXILIARY OPEN LIMIT SWITCH
OLS OPEN LIMIT SWITCH
IP1 VALVE MIDDLE TRAVEL POSITION SWITCH(No 1)
TRM THERMAL PROTECTION DEVICE (MOTOR WIND). IP2 VALVE MIDDLE TRAVEL POSITION SWITCH(No 2) C
A
6. THE USER MUST COMPLETE A RISK ASSESSMENT AND IMPLEMENT WHATEVER MEASURES ARE REQUIRED TO ENSURE
A
THAT THE RESULTANT SYSTEM COMPLIES WITH ALL APPLICABLE LEGISLATION.
电动阀门智能控制器说明书
---------------------------------------------------------------------------------------------------产品的不断升级可能导致部分数据的变化,如有改动,恕不另行通知。
KZQ07系列电子伺服式电动阀门智能控制器使用说明书本定位器出厂之前已对其输入、输出性能进行严格标定,接线后一般只需标定零、满位即可正常使用,如有任何不明之处,请与相关技术服务部门联系。
KZQ07-1AKZQ07-2A尊敬的用户,请在安装本控制器前请仔细检查以下内容:1、检查执行器的内部位置限位切换开关,确保限位开关在区域内工作,有无异常现象,能否达到开度的零位与满位,确认限位开关能正常工作。
2、接线前请检查执行器中电位器有无强电,用万用表分别测量电位器三接线端子,确保该电位器与电机控制端子绝缘,电位器在执行器运转过程中的阻值变化正常,排除断点等异常现象。
3、定位器与执行器间连线要正确,仔细检查两者端子的对应关系,特别注意定位器电源、输入信号与输出信号接线,切莫把电源接至弱点信号端,同时用仪表测量控制输入信号在定位器接受信号范围内。
4、如与执行器配套使用,在严寒、酷热、高温的环境下开箱时,仪表应于现场存放3小时以上方可进行标定效验。
目录一、概述-----------------------------------------------------------------------------2二、主要技术指标-----------------------------------------------------------------2 三、定位器控制原理--------------------------------------------------------------4四、定位器面板与接线-----------------------------------------------------------5五、基本操作方法-----------------------------------------------------------------9六、标定接线及操作方法--------------------------------------------------------9七、错误代码列表-----------------------------------------------------------------11八、附录-----------------------------------------------------------------------------12如客户所购买指明配置的本公司Z型(机电一体)执行器,无需对执行器转角标定,接线无误即可正常使用。
ewne电动阀门说明书

ewne电动阀门说明书
电动阀门是一种电气控制的开关,用于调节流体的流量或压力。
根据控制方式,电动阀门可以分为手动阀门、电动控制阀门和电动自动控制阀门。
电动阀门的使用需要安装电动阀门控制器,并按照说明书中的操作程序进行操作。
电动阀门控制器可以通过电信号或气动信号来控制阀门的开关。
以下是电动阀门的一般使用方法:
1. 安装电动阀门:将电动阀门安装在工程管道上,并拧紧阀门连接管。
连接管应连接到管道系统的进水阀门或出水阀门。
2. 连接电动阀门控制器:将电动阀门控制器连接到电源线路上,并检查控制器的电源是否正常。
3. 设置控制信号:根据工程管道的流量、压力和控制要求,设置电动阀门的控制信号。
4. 运行电动阀门:启动电动阀门控制器,并根据需要进行调整控制信号,使阀门处于所需状态。
5. 维护保养:定期对电动阀门进行关闭和开启操作,检查阀门连接处的密封情况,并对控制器进行维护和检查。
使用电动阀门时,一定要按照说明书中的操作程序进行操作,以免出现危险。
同时,在运行过程中遇到问题,应及时联系专业人员进行处理。
多关节电动阀门控制器说明书

AOLS AUXILIARY OPEN LIMIT SWITCH
OLS OPEN LIMIT SWITCH
IP1 VALVE MIDDLE TRAVEL POSITION SWITCH(No 1)
TRM THERMAL PROTECTION DEVICE (MOTOR WIND). IP2 VALVE MIDDLE TRAVEL POSITION SWITCH(No 2) C
KM3
L3
KM4
L4
OVERTORQUE IN CLOSE DIRECTION
OVERTORQUE IN OPEN DIRECTION
ELECTRIC ACTUATOR
7
8
250VAC/5A 24VDC 0,25A max (SEE NOTES BELOW)
ACLS
AOLS
0
34 36 ACLS ACLS
14-15
OLS
16-17 18-19
14-15
OLS
16-17 18-19
A
3. DPDT TORQUEN(CTS, OTS, ACTS, AOTS) AND LIMIT MICROSWITCHES (CLS, OLS, ACLS, AOLS) HAVE 1NO+1NC CONTACTS, ONLY SAME POTENTIAL CAN
49
28 29 30 53
50 51 52
LONGER COMPLY WITH THE ESSENTIAL SAFETY REQUIREMENTS. 4. THE USER MUST FIT A CLASS 10 OVERLOAD RELAY. THE RELAY MUST BE SIZED ACCORDING TO THE OVERCURRENT PROT.
FC 阀门定位器说明书V
产品的不断升级可能导致部分数据的变化,如有改动恕不另行通知电动阀门智能定位器/阀门操作器(电子式伺服控制器)产 品 说 明 书(V1.0)通 用 型目录一、 概述 (1)二、 电气性能指标 (1)三、 主要技术指标 (2)四、 操作显示面板 (3)五、 接线方法 (4)六、 产品使用方法 (5)七、 产品输入输出信号标定 (6)八、 出厂恢复与辅助设置 (7)九、 错误代码列表 (8)十、 用户软件操作流程图 (8)符-oh-。
U5等于-oh-状体下才能进入到U6、U7手动转角标定。
当U5在数字密码状态时,按下键递减数据,可回到-oh-状态。
当按住▲或▼键不动时,数据以恒定的速度快速递增和递减。
U0-U13按▲或▼键修改设置参数堵转测试:当发给执行器动作指令时,若在xx.x 秒都没有动作,将发出-E4-(或-E5-)错误代码,并停止xx.x 秒后,向动作指令的反方向动作2秒,然后再向动作指令的方向动作xx.x 秒,若故障消除,则清除错误代码且解除报警状态,继续工作。
若没有解除,则再停止xx.x 秒后,向动作指令的反方向动作2秒,然后再向动作指令的方向动作xx.x 秒。
如此往复动作3回合,都没有消除故障,则永远出现-E4-(或-E5-)错误代码和报警,等待人为断电故障排查。
3、故障报警:当产品有报警接口,且出现故障代码时,报警继电器由常开转为常闭。
代码消失,报警继电器恢复常开,完全与故障代码同步。
注意:无效回差时间(传动误差)较大时,应将堵转时间设定大些避免误报警!执行器电机连接线脱接、过热保护、执行器传动齿轮间隙大、电位器安装时传动齿轮之间间隙大、电位器脱接或质量不良等因素,都会产生堵转处理程序,所以出现此故障,请先排查执行器问题。
补充说明:1、U0-U4菜单的功能可在线调试,可定位器处于自动控制状态,当某参数发生改变时,定位器能根据新参数实时调控。
2、在U5菜单时,U5与-oh -交替显示。
电动调节阀智能定位器使用说明书
HKPS-MODBUS电动调节阀智能定位器使用说明书一、概述HKPS-MODBUS电动调节阀智能定位器(以下简称定位器)是和电动执行机构配套使用的。
具有体积小,可靠性高,具有MODBUS通信功能等特点,是在HKPS-ASM定位器基础上的改进产品,该定位器将控制执行机构的4~20mA电流信号,与执行机构当前位置信号进行比较,并根据偏差情况,控制电动执行机构开或关动作,使执行机构位置与输入信号平衡。
该定位器还具有手动功能,能满足更多用户现场调试的需要。
本手册包括HKPS-MODBUS技术指标,接线端子定义,按键和红外遥控器的使用方法等。
用户在使用HKPS-MODBUS前,请认真阅读本手册,并按本手册提供的操作方法完成您的操作。
若在使用过程中有不清楚的地方或发现其他问题,请及时与本公司联系。
本公司将尽快回复,并解决您的问题。
TEL:(010)58859981/92FAX:(010)58859950HTTP:// E-MAIL: hart@谢谢您选用HKPS-MODBUS电动调节阀智能定位器。
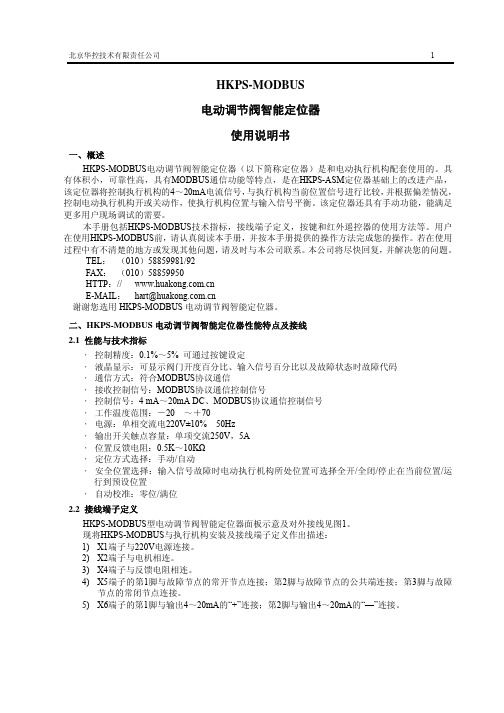
二、HKPS-MODBUS电动调节阀智能定位器性能特点及接线2.1 性能与技术指标・控制精度:0.1%~5% 可通过按键设定・液晶显示:可显示阀门开度百分比、输入信号百分比以及故障状态时故障代码・通信方式:符合MODBUS协议通信・接收控制信号:MODBUS协议通信控制信号・控制信号:4 mA~20mA DC、MODBUS协议通信控制信号・工作温度范围:-20℃~+70℃・电源:单相交流电220V±10% 50Hz・输出开关触点容量:单项交流250V,5A・位置反馈电阻:0.5K~10KΩ・定位方式选择:手动/自动・安全位置选择:输入信号故障时电动执行机构所处位置可选择全开/全闭/停止在当前位置/运行到预设位置・自动校准:零位/满位2.2 接线端子定义HKPS-MODBUS型电动调节阀智能定位器面板示意及对外接线见图1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
---------------------------------------------------------------------------------------------------产品的不断升级可能导致部分数据的变化,如有改动,恕不另行通知。
KZQ07系列电子伺服式电动阀门智能控制器使用说明书本定位器出厂之前已对其输入、输出性能进行严格标定,接线后一般只需标定零、满位即可正常使用,如有任何不明之处,请与相关技术服务部门联系。
KZQ07-1A KZQ07-2A尊敬的用户,请在安装本控制器前请仔细检查以下内容:1、检查执行器的内部位置限位切换开关,确保限位开关在区域内工作,有无异常现象,能否达到开度的零位与满位,确认限位开关能正常工作。
2、接线前请检查执行器中电位器有无强电,用万用表分别测量电位器三接线端子,确保该电位器与电机控制端子绝缘,电位器在执行器运转过程中的阻值变化正常,排除断点等异常现象。
3、定位器与执行器间连线要正确,仔细检查两者端子的对应关系,特别注意定位器电源、输入信号与输出信号接线,切莫把电源接至弱点信号端,同时用仪表测量控制输入信号在定位器接受信号范围内。
4、如与执行器配套使用,在严寒、酷热、高温的环境下开箱时,仪表应于现场存放3小时以上方可进行标定效验。
目录一、概述-----------------------------------------------------------------------------2二、主要技术指标-----------------------------------------------------------------2三、定位器控制原理--------------------------------------------------------------4四、定位器面板与接线-----------------------------------------------------------5五、基本操作方法-----------------------------------------------------------------9六、标定接线及操作方法--------------------------------------------------------9七、错误代码列表-----------------------------------------------------------------11八、附录-----------------------------------------------------------------------------12如客户所购买指明配置的本公司Z型(机电一体)执行器,无需对执行器转角标定,接线无误即可正常使用。
一、概述:KZQ07系列电动阀门智能定位器是专门为电动执行器配套开发的数字控制系统,采用汽车工业专用的微处理器作为核心处理单元,是真正意义上的智能数字采集控制系统。
可直接安装在电动执行器的接线盒内或以DIN导轨方式固定在外,无须专门的控制箱,体积小,安装方便。
KZQ07系列电动阀门智能定位器使用固态可控硅进行无触点控制电机,简单可靠,配合高分辨率位置传感器,不但控制精度高,控制准确,且寿命长,可靠性高。
另外控制系统无须保持电池,可在完全停电后再次通电时,自动识别出执行器位置的变化。
KZQ07系列电动阀门智能定位器能直接接收工业仪表或计算机等输出的4~20mA DC信号(其它输入信号类型可在出厂前定制),与安装有位置反馈传感器的电动执行器配套,对各种阀门或装置进行精确定位操作,能对电动执行器的转角(或位移)进行自由标定,同时输出4~20mA DC的执行器转角位置(或位移)反馈转换信号,可按键精确设定执行器转角位置的下限限位值和上限限位值,定位器采用3个按键操作,9个LED灯可直接显示定位器模态,4位数码LED通过按键切换显示阀位实际开度值、阀位设定开度值、定位器壳内温度,操作方便。
二、主要技术指标:1、控制精度:%~%(通过D参数可调)2、可接电动执行器反馈信号:电位器500Ω~10KΩ3、可接收外部控制信号(DC):4~20mA (1~5V、0~10V、开关量等出厂前定制)4、输入阻抗:250Ω;5、通过修改参数可设定:①DRTA:正动作;RVSA:逆动作模态②输入信号中断时“中断”模态—OPEN(开)、STOP(停)、SHUT(闭)6、可控硅输出(1000V AC,25A)7、输出执行器位置信号:低漂移输出4~20mA DC对应执行器全闭至全开,信号完全与输入隔离(光电隔离),输出负载≤500Ω8、环境温度:-10~80℃,相对湿度:≤90RH%9、超温保护功能: 定位器壳内温度≥80℃时,定位器停止对执行器开闭控制10、外形尺寸:KZQ07-1A →74mm(长)x58mm(宽)x38mm(高);KZQ07-1B →61 mm(长)x48mm(宽)x27mm(高)11、可通过按键自由标定输入信号所对应执行器的动作区间(一般标定为电动执行器全闭、全开位置)12、可设定上下限位点:超过限位点,定位器自动报警提示。
13、执行器堵转检测控制功能:如控制执行器发生堵转持续3~4S,定位器则断开控制输出,并给予报警提示;反复检测控制,至堵转排除。
14、可设定宽范围的调整精度(设置参数为“d”):由于执行器在工作过程中,各种干扰因素的存在,可能导致无法定位,可以对定位器的控制精度进行设定到合适的控制精度,避免反复定位震荡现象出现。
15、具有密码锁,防止误操作。
16、设置有防执行器频繁启动功能。
17、错误代码指示故障原因(ERR0---ERR9)。
18、按输入信号和执行器转角位置进行智能步距调整精确定位。
三、定位器控制原理:本定位器可由执行器内部220V AC供电,无须用户提供额外的电源。
定位器采用以直流电流作为控制和反馈信号,上位仪表或计算机使用模拟信号(4----20mA)发出控制控制阀门的开关信号,由装在执行器内的定位器电路接收,并将此信号与执行器中的位置传感器的反馈信号进行比较、逻辑运算、放大为可控制电机的强电信号,控制执行机构按信号的大小比例动作,使阀门开到相应的开度,同时由定位器将开度信号反馈回上位仪表或计算机,从而完成调节功能。
四、定位器面板与接线:1、定位器面板:KZQ07-1A操作面板图KZQ07-2A操作面板图面板功能说明参数显示1数码管通过按键切换显示阀门实际开度值、阀门设定开度值、定位器壳内温度和设定参数状态指示2POWER电源指示3OPEN输出控制“开”4SHUT 输出控制“闭”5MANU 手动状态6AUTO 自动状态模式指示(MODE)7DRTA正动作模式,输入信号对应输出如下:4mA —零位( 一般标定为全闭)20mA —满位( 一般标定为全开) 8RVSA逆动作模式,输入信号对应输出如下:4mA —满位( 一般标定为全开)20mA —零位( 一般标定为全闭) 9OPEN输入信号中断模态为“开”, 使执行器开至最大开度限位处10STOP输入信号中断模态为“停”, 使执行器停在当前位置11SHUT输入信号中断模态为“闭”, 使执行器开至最小开度限位处按键12A/M1、手动/ 自动切换键2、参数的进入修改和确定键13▲UP1、数值增加键;2、自动状态下还用于切换显示阀位设定开度值,手动状态下为“开”控制14▼DOWN1、数值减少键;2、自动状态下还用于切换显示定位器壳内温度,手动状态下为“闭”控制KZQ07-2A操作面板功能说明:2.接线参见下图进行接线,按照接线端子和仪表外壳上的接线图(小心揭开底面封胶片,可以看见上紧螺丝,连接无误后重新封粘胶片),连接好电动执行器和电源连线,注意连接时的极性,为减少电机干扰,应将电动执行器的电机控制线和反馈信号线分开走线;接上位仪表的电流控制信号线应尽量短些,若必须使用较长的连线时,应采用屏蔽信号线,外屏蔽与控制柜外壳妥善接地。
RRMOTOs h u to p e nc o m0%100%220VINPUT 4-20mA R OR SR Vs h u to p e nc o m220V_INOUTPUT 4-20mAKZQ07接线图定位器与电动执行器通过一个六线接插件连接:RO 、RV 、RS 分别接电动执行器内的反馈电位器的三个端子,其中RV 接电位器的滑臂,RO 接执行器开动作时与滑臂之间电阻不断减小一端,RS 则接另一端;SHUT 、OPEN 、COM 分别接执行器伺服电机的闭、开、COM 端子。
■接线建议:1、为了减弱执行器启动停止时电流冲击,一般在“OPEN ”、“CLOSE ”分别与执行器中的“开”、“闭”间接上4Ω/5W 的水泥电阻(如上图R )2、定位器COM 、OPEN 、SHUT 为市电220V50Hz 交流有源输出端子,COM 、OPEN 与COM 、SHUT 对应输出电压为市电220V 交流电源电压。
五、基本操作方法:1、上电时,面板所有指示灯和数码管闪动两次,定位器开始自检,蜂鸣器先“短”后“长”发出蜂鸣声,表示定位器检测正常。
2、自检完成后定位器数码管显示阀位实际开度值,定位器进入自动测控状态。
3、按A/M 键可切换到手动状态,分别按▲和▼键,检测执行器应对应为“开”和“闭”运行动作,否则检查定位器(COM 、OPEN 、SHUT )与执行器(COM 、开、闭)之间接线是否正确;4、在自动测控状态下,按▲查看阀位开度设定值,此时可查看输入信号的变化趋势和稳定性;5、在自动测控状态下,按▼可观察定位器壳内温度,当温度超过70℃时,定位器停止对执行器的开、闭控制。
6、长按A/M 键超过2秒,定位器进入参数设定状态,如超过10秒无按键操作,自动退回到自动状态。
六、标定接线及操作方法:(一)电流输入和电流输出标定接线:如需要对定位器的电流输入和电流输出进行标定,则按下面的接线图连接好给定信号源、定位器、电动执行器、输出信号测量仪表及电源之间的连线;KZQ07标定接线图(二)阀位标定的操作方法参数列表:(见附录三内容)1、标定执行器的零位和满位定位器首次与执行器配合使用,必须进行执行器转角或行程的标定,此后定位器才能正常工作,此标定对定位器的输入、输出信号无影响。
方法一(自动标定):此标定方法需要求执行器有行程限位开关。
在手动或自动测控状态,同时按动▲和▼键,即启动自动标定,此时定位器先标定零位,后标定满位,标定完后定位器处在自动测控状态。
中间定位器会有停顿,进行数值计算。
标定后的参数,定位器会自动储存。
方法二(手动标定法):(1)零位“uL”参数设定进入到P参数,按▲或▼,使P参数=,按A/M键确定后,显示“uL”值,通过按▼键,执行器相应朝“闭”方向运作,同时显示的阀位实际开度值也相应逐渐变小,当到达期望零位时(一般设在全闭位置),按A/M键,零位确认“uL”参数值。