Bode 稳定性判定
第5章(3)稳定性的Bode判椐

0
-90 -180
c
三、Bode判据
g
在Bode图上的 =0→c范围内,开环对数相频特性相对 -180o线
p (正穿越次数-负穿越次数)= 2
jik 10
时,闭环系统稳定,否则不稳定。
2
(1)当P=0,GK(jω)的Bode图 若c < g,则系统稳定; 若c > g,则系统不稳定。
§5.4 Bode稳定判据
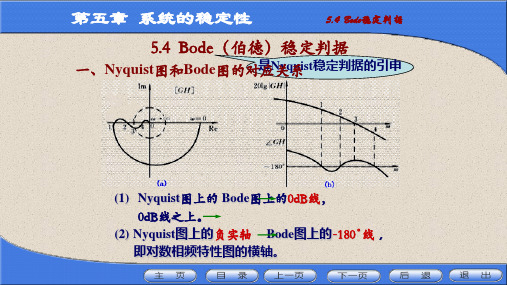
一、Nyquist图和Bode图的对应关系
(1) Nyquist图的单位圆对应于Bode图上的零分贝线
GK ( j c ) 1, 20 lg GK ( j c ) 0dB
(2) Nyquist图的负实轴相当于Bode 图上的-180o线;
GK ( j g ) 180
11
g
1/Kg
Im
Im 1 Re (j)
(j)
A c ( c) j
c A
g
1 Re
(c)
1/Kg j
P=0的系统稳定
与负实轴交点在(-1, j0)点右边
离(-1, j0)点越远,稳定程度越高 稳定程度的度量:相位裕度,幅值裕度Kg
说明:当c < g,奈氏轨迹与负实轴的交点在单位 圆内, 不可能围绕(-1,j0)点,∴系统稳定。 (2)P≠0的一般情况 正穿越: 相频特性由下而上穿过-180o线, 图中b点(相角趋正); 负穿越: 相频特性由上而下穿过-180线, 图中a点(相角趋负)。 比较:正穿越b←→b'(相角趋正); 负穿越a←→a'(相角趋负)。
jik 10
10
§5.5 系统的相对稳定性
bode-fano准则

bode-fano准则Bode-Fano准则:稳定性与性能的平衡Bode-Fano准则是一种用于稳定性和性能平衡的设计方法。
它通过频率响应的解析来评估系统的稳定性和性能,并提供了一种定量的分析方法。
这个准则的基本思想是,系统的稳定性与性能之间存在一种权衡关系,通过调整系统的参数或结构,可以达到所需的性能指标。
在Bode-Fano准则中,系统的频率响应被分解为稳定性边界和性能边界。
稳定性边界表示系统在稳定的条件下的频率响应,而性能边界则表示系统在满足性能要求的条件下的频率响应。
通过分析这两个边界,可以在稳定性和性能之间找到一个平衡点。
在实际应用中,Bode-Fano准则可以用于设计控制系统、滤波器和放大器等。
例如,在控制系统设计中,我们希望系统能够快速响应外部输入,并且保持稳定性。
通过分析系统的频率响应,可以确定系统的稳定性边界和性能边界,并根据需求调整系统的参数,以达到稳定性和性能的平衡。
另一个应用领域是滤波器设计。
滤波器是用于信号处理的重要工具,可以根据信号的频率特性对信号进行调节。
通过Bode-Fano准则,可以评估滤波器的稳定性和性能,并根据需求进行调整。
例如,在音频处理中,我们希望滤波器能够准确地分离低频和高频信号,同时保持系统的稳定性。
通过Bode-Fano准则的分析,可以确定滤波器的稳定性边界和性能边界,并根据需求调整滤波器的参数,以达到稳定性和性能的平衡。
除了控制系统和滤波器,Bode-Fano准则还可以应用于放大器设计。
放大器是电子设备中常见的组件,用于放大信号的幅度。
在放大器设计中,我们希望放大器能够提供稳定的放大倍数,并保持系统的稳定性。
通过Bode-Fano准则的分析,可以评估放大器的稳定性和性能,并根据需求调整放大器的参数,以达到稳定性和性能的平衡。
总结起来,Bode-Fano准则是一种用于稳定性和性能平衡的设计方法。
通过分析系统的频率响应,可以评估系统的稳定性和性能,并根据需求调整系统的参数,以达到稳定性和性能的平衡。
Bode 稳定性判定PPT课件
第五章 系统的稳定性
5.4 Bode稳定判据
三、Bode稳定判据
在Bode图上,当由0→+∞时,在开环对数幅频特性为正
值的频率范围内,开环对数相频特性对-180°线的正负穿越 次数的代数和为P/2。
P=2N 或 N=P/2
特别
P=0时,若 ωc<ωg,闭环系统稳定
ωc>ωg,闭环系统不稳定 ωc =ωg, 闭环系统临界稳定
谢谢您的指导
THANK YOU FOR 的内容可以在下载后随意修改,调整和打印。欢迎下载!
汇报人:XXXX 日期:20XX年XX月XX日
第五章 系统的稳定性
5.4 Bode稳定判据
(-1,j0)
ωc ωg
ωc ωg1 ωg2 ωg3
ωc:幅值穿越频率(剪切频率)
A(ωc)=1 L(ωc)=0
ωg:相位穿越频率
φ(ωg)= -180°
第五章 系统的稳定性
二、穿越的概念
(-1,j0)
5.4 Bode稳定判据
_+
开环对数幅频特性为正值的频率范围内, 其对数相频特性穿过-180°线
第五章 系统的稳定性
5.4 Bode稳定判据
5.4 Bode(伯德)稳定判据
一、Nyquist图和Bode图的对是应N关yq系uist稳定判据的引申
(1) Nyquist图上的 Bode图上的0dB线, 0dB线之上。
(2) Nyquist图上的负实轴 Bode图上的-180°线, 即对数相频特性图的横轴。
系统的稳定性常见判据

定义:
无输入时的初态
系统在初始状态作用下
输入引起的初态
输出
收敛(回复平衡位置)
(响应) 发散(偏离越来越大)
系统稳定 系统不稳定
2. 系统稳定条件
线性定常系统:
anxo(n) (t )
an
1
x ( n1) o
(
t
)
a1
x o(
其中:
A1
an1an2 anan3 an1
A2
an1an4 anan5 an1
A3
an1an6 anan7 an1
B1
A1an3 an1 A2 A1
B2
A1an5 an1 A3 A1
B3
A1an7 an1 A4 A1
s0 F1
Routh 判据:Routh表中第一列各元符号改变的次数等于系统特
t
)
a0 xo(t )
xi(t )
自由响应
强迫响应
n
n
xo(t ) A1ie sit A2ie sit B(t )
i 1
i 1
系统的初态引 输入引起的 起的自由响应 自由响应
si:系统的特征根
2. 系统稳定条件
1) 当系统所有的特征根si(i=1,2,…,n)均具有负实部(位
于[s]平面的左半平面)
lt im
n i 1
A1i e si t
n i 1
A2i e si t
0
自由响应收敛,系统稳定
2) 若有任一sk具有正实部(位于[s]平面的右半平面)
lim e skt
t
ltim
第五章系统的稳定性-机械工程控制基础-教案
Chp.5系统稳定性基本要求1.了解系统稳定性的定义、系统稳定的条件;2.掌握Routh判据的必要条件和充要条件,学会应用Routh判据判定系统是否稳定,对于不稳定系统,能够指出系统包含不稳定的特征根的个数;3.掌握Nyquist 判据;4.理解Nyquist 图和Bode 图之间的关系;5.掌握Bode 判据;6.理解系统相对稳定性的概念,会求相位裕度和幅值裕度,并能够在Nyquist 图和Bode 图上加以表示。
重点与难点本章重点1.Routh 判据、Nyquist 判据和Bode 判据的应用;2.系统相对稳定性;相位裕度和幅值裕度求法及其在Nyquist图和Bode 图的表示法。
本章难点Nyquist 判据及其应用。
§1 概念示例:振摆1、稳定性定义:若系统在初始条件影响下,其过渡过程随时间的推移逐渐衰减并趋于0,则系统稳定;反之,系统过渡过程随时间的推移而发散,则系统不稳定。
(图5.1.2)讨论:①线性系统稳定性只取决于系统内部结构和参数,是一种自身恢复能力。
与输入量种类、性质无关。
②系统不稳定必伴有反馈作用。
(图5.1.3)若x0(t)收敛,系统稳定;若x0(t)发散,则系统不稳定。
将X0(s)反馈到输入端,若反馈削弱E(s) →稳定若反馈加强E(s) →不稳定③稳定性是自由振荡下的定义。
即x i(t)=0时,仅存在x i(0-)或x i(0+)在x i(t)作用下的强迫运动而系统是否稳定不属于讨论范围。
2、系统稳定的条件:对[a n p n+a n-1p n-1+…a1p+a0]x0(t)=[b m p m+b m-1p m-1+…b1p+b0]x i(t)令B(s)= a n p n+a n-1p n-1+…a1p+a0 A(s)= b m p m+b m-1p m-1+…b1p+b0初始条件:B0(s) A0(s)则B(s)X0(s)- B0(s)= A(s)X i(s)- B0(s)X i(s)=0,由初始条件引起的输出:L-1变换根据稳定性定义,若系统稳定须满足,即z i为负值。
系统的稳定性nyquist判据以及bode判据46页PPT

1、最灵繁的人也看不见自己的背脊。——非洲 2、最困难的事情就是认识自己。——希腊 3、有勇气承担命运这才是英雄好汉。——黑塞 4、与肝胆人共事,无字句处读书。——周稳定性nyquist判据以及bode判据
1、合法而稳定的权力在使用得当时很 少遇到 抵抗。 ——塞 ·约翰 逊 2、权力会使人渐渐失去温厚善良的美 德。— —伯克
3、最大限度地行使权力总是令人反感 ;权力 不易确 定之处 始终存 在着危 险。— —塞·约翰逊 4、权力会奴化一切。——塔西佗
5、虽然权力是一头固执的熊,可是金 子可以 拉着它 的鼻子 走。— —莎士 比
控制系统稳定性控制
控制系统稳定性控制控制系统的稳定性是指在系统输入和干扰的作用下,系统输出能够保持在一定范围内,并且不会发生剧烈的波动或不稳定的情况。
稳定性是控制系统设计和优化中的重要考虑因素,它直接关系到系统的性能和可靠性。
一、稳定性的基本概念在控制系统中,稳定性可以分为两类:绝对稳定性和相对稳定性。
绝对稳定性是指当系统的任何初始条件和参数变化都不会引起系统的输出超出一定范围,系统始终保持稳定。
相对稳定性是指系统在参数变化或干扰作用下,虽然会有一定的波动或震荡,但最终输出会趋于稳定。
二、稳定性判断的方法常用的判断控制系统稳定性的方法有两种:时域方法和频域方法。
1. 时域方法时域方法是通过分析系统的状态方程或差分方程来判断系统的稳定性。
常用的判断方法有:极点位置判据、Nyquist稳定性判据、Hurwitz 稳定性判据等。
极点位置判据是指通过分析系统极点的位置来判断系统的稳定性。
当系统的所有极点的实部都小于零时,系统是稳定的。
Nyquist稳定性判据是将控制系统的开环传递函数绘制在复平面上,通过分析曲线的轨迹来判断系统的稳定性。
Hurwitz稳定性判据是通过分析系统特征方程的Jacobi矩阵行列式来判断系统的稳定性。
2. 频域方法频域方法是通过分析系统的频率响应来判断系统的稳定性。
常用的判断方法有:Bode稳定性判据、Nyquist稳定性判据等。
Bode稳定性判据是通过分析系统的频率响应曲线的相角和幅值来判断系统的稳定性。
当系统幅值曲线超过0dB的频率点相角为-180°时,系统是稳定的。
三、控制系统稳定性的控制方法为了保证控制系统的稳定性,通常采取以下方法进行控制:1. 增加稳定裕度稳定裕度是指系统在保持稳定的前提下,对参数变化或负载波动的容忍能力。
通过增加稳定裕度,可以提高系统的鲁棒性和可靠性。
常用的方法有:采用PID控制器、增加系统正反馈等。
2. 优化控制器参数优化控制器参数是通过对系统的传递函数进行分析和调节,使系统的性能指标达到最优。
动态系统稳定性分析与控制

动态系统稳定性分析与控制一、引言动态系统是指随着时间变化而变化的系统,这种系统包括各种物理、机械、化学以及电气系统等。
动态系统广泛应用于实际生产和生活中,如飞机、汽车、电机、水力发电站等,其稳定性分析和控制具有至关重要的意义。
本文将对动态系统的稳定性分析和控制进行详细介绍。
二、动态系统稳定性分析1. 基本概念稳定性是动态系统中一个非常重要的概念,表示系统在运动过程中是否趋向于某个平衡状态。
对于一个稳定的系统,当受到干扰后,其状态会在一定时间内恢复到原来的稳定状态。
动态系统的稳定性可以分为两种情况:一种是渐进稳定,另一种是条件稳定。
2. 稳定性分析方法稳定性分析方法主要有两种,一种是解析法,另一种是数值法。
(1)解析法解析法是指通过数学的方法分析系统的性质,从而得到系统的稳定性。
该方法通常适用于简单的线性系统,如一次方程、二次方程等。
解析法的优点是分析结果简单明了,易于在复杂系统中建立稳定性分析模型,但是对于非线性系统和复杂系统需要采用更加复杂的解析方法。
(2)数值法数值法是指通过计算机模拟系统的运动过程,从而获得系统的运动特性和稳定性。
数值法主要有多种,如欧拉法、四阶龙格-库塔法等。
数值法的优点是适用于各种不同的动态系统,但是需要有一定的计算机编程基础。
3. 常用的稳定性分析工具稳定性分析工具主要有两种:一种是Nyquist图,另一种是Bode图。
(1)Nyquist图Nyquist图是对于一个线性时不变(LTI)系统,通过将Laplace 变换中的幅值和相位表示为复数,绘制复平面上的反馈函数的图像。
图像的形状可以用来判断系统是否稳定,具体方法可以参考Nyquist判据。
(2)Bode图Bode图是一种用于描述系统幅频特性的图像,通常由两个曲线组成,分别是幅度响应和相位响应。
这两条曲线可以用来判断系统的稳定性和分析系统的动态响应特性。
三、动态系统控制1.常见控制方法动态系统控制方法主要有两种:负反馈控制和正反馈控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 系统的稳定性
Bode稳定判据的优点:
5.4 Bode稳定判据
1. Bode图可以用渐近线近似作出,作图比较简便; 2. 用Bode图的渐近线,可粗略判别系统的稳定性; 3. 在Bode图中,分别作出各环节的对数幅频、对数相频特性 曲线,以便明确哪些环节是造成不稳定的主要因素,从而对 其中参数进行合理选择或校正; 4. 在调整开环增益K时,只需将Bode图中的对数幅频特性上下
第五章 系统的稳定性
(-1,j0)
5.4 Bode稳定判据
ωc
ωg ωc ωg1 ωg2
A(ωc)=1
L(ωc)=0
ωg3
ωc:幅值穿越频率(剪切频率)
ωg:相位穿越频率
φ(ωg)= -180°
第五章 系统的稳定性
二、穿越的概念
(-1,j0)
5.4 Bode稳定判据
_ +
开环对数幅频特性为正值的频率范围内, 其对数相频特性穿过-180°线
第五章 系统的稳定性
5.4 Bode稳定判据
5.4 Bode(伯德)稳定判据
是Nyquist稳定判据的引申 一、Nyqut图上的单位圆 Bode图上的0dB线, 单位圆之外 对数幅频特性图的0dB线之上。 (2) Nyquist图上的负实轴 Bode图上的-180°线, 即对数相频特性图的横轴。
第五章 系统的稳定性
三、Bode稳定判据
5.4 Bode稳定判据
在Bode图上,当由0→+∞时,在开环对数幅频特性为正 值的频率范围内,开环对数相频特性对-180°线的正负穿越 次数的代数和为P/2。 P=2N 或 N=P/2
特别
P=0时,若 ωc<ωg,闭环系统稳定 ωc>ωg,闭环系统不稳定 ωc =ωg, 闭环系统临界稳定
平移即可,因此很容易看出为保证系统稳定所需的增益值。