4第四节高阶系统分析报告
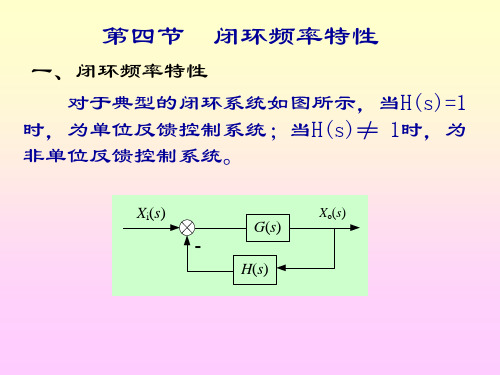
第四节高阶系统分析
等式两端计算: [sC(s)] |s=0
A0 = 1 留数法
同理, 等式两端计算: [(s + p3 )C(s)] |s=− p3
A3
=
ζ
2β
−1 (β −
2)
+1
两端计算:
C ( s )( s 2
+
2ζωn s
+ωn2来自)|s=−ζωn ±
jωn
1−ζ 2
可列出两个方程,求解得:
A1
=
−ζ ζ 2β
对于不能简化为低阶系统的高阶系统,可采用数值计算 的方法进行仿真,得出系统的瞬态性能指标。
Saturday, October 05, 2013
2
一个高阶系统的例子:
Φ(s) =
10
s(s +1)(s +10)
令 Φ(s) = a + b + c 部分分式法(待定系数法) s s +1 s +10
第四节 高阶系统分析
Saturday, October 05, 2013
自动控制原理B
面向专业:微电子系
授课教师:刘剑毅
1
overview 在控制工程中,几乎所有的控制系统都是高阶系统,即 用高阶微分方程描述的系统。
分析高阶系统的基本思路是将其简化为一、二阶系统。
工程上常采用闭环主导极点的概念对高阶系统进行近似 分析,得到动态性能指标的估算公式。
⎪⎩ 10a = 10
⎪⎩ c = 1/ 9
求该系统的单位脉冲响应: C(s) = Φ(s) ⋅1 = 1 − 10 1 + 1 1 s 9 s +1 9 s +10
Saturday, October 05, 2013
高阶系统性能分析
题 目: 高阶系统性能分析 初始条件:设单位系统的开环传递函数为122(1)()(24)(1)p K s G s s s s s ττ+=+++ 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 当120ττ==时,绘制根轨迹并用Matlab 求取单位阶跃响应、单位斜坡响应,并求取动态和稳态性能指标2、 当12120.2,05,0ττττ====和时,分别绘制闭环系统根轨迹并用Matlab 求取单位阶跃响应、单位斜坡响应,并求取动态和稳态性能指标 3、 当12120,0.20,5ττττ====和时,分别绘制闭环系统根轨迹并用Matlab 求取单位阶跃响应、单位斜坡响应,并求取动态和稳态性能指标 4、 比较上述三种情况的仿真结果,分析原因,说明增加零极点对系统性能的影响。
时间安排:指导教师签名: 年 月 日系主任(或责任教师)签名: 年 月 日高阶系统性能分析1.课设分析1.1课设目的1.了解高阶系统的稳态性能,动态性能与系统开环传递函数零极点的关系。
2.学习并熟悉根据系统开环传递函数作系统根轨迹曲线。
3.学会运用matlab求系统的阶跃响应,斜坡响应,观察系统动态性能。
运用matlab绘根轨迹曲线。
1.2分析过程1.在控制过程中,几乎所有的系统都是高阶系统,即用高阶微分方程描述的系统,其动态性能指标的确定是比较复杂的,工程上常采用闭环主导极点的概念对高阶系统进行近似分析,或直接应用MATLAB软件进行高阶系统分析。
2.在此次高阶系统分析之中,将待求的三个状态进行比较,可以将第一参数状态为原型系统的传递函数,第二类为添加不同零点的开环传递函数,第三类为添加不同极点的开环传递函数。
3.在运用matlab对系统进行创建和时域分析时,进行时域分析的传递函数是闭环传递函数,在绘制根轨迹曲线时参照的传递函数是开环传递函数。
4.系统的稳态性能在本次课设中为稳态位置误差,稳态速度误差,动态性能有五个指标:延迟时间td ,上升时间ts,峰值时间tp,调节时间ts,超调量σ%。
自动控制原理第3章
12
一阶系统分析
3、单位抛物线响应
y(t)的特点:
y(t)1t2T tT2(1eT t) t0 2
输入与输出之间存在误差为无穷大,这意味着一阶系
统是不能跟踪单位抛物线输入信号的。
4、单位脉冲响应
t
y(t)TeT t0
当 t时, y()0
13
一阶系统分析
对一阶系统典型输入响应的两点说明: 1、输入信号为单位抛物线信号时,输出无法跟踪输入 2、三种响应之间的关系:
38
稳定性分析及代数判据
劳斯判据:
系统稳定的必要条件:特征方程所有系数均为正。
系统稳定的充分条件:特征方程所有系数组成劳斯表,其第 一列元素必须为正。
具体步骤:
1、先求出系统的特征方程
a n S n a n 1 S n 1 a 1 S a n0
注意:
(1) s要降阶排列 (2) 所有系数必须大于0
阶跃响应:
p 2 j1 2 n
Y sss22 n2 n s n2A s1s2 A 2 2 s n s A 3 n
yt 11 12e n t sin 1 2n t
y(t)
ξ=0.3
1
ξ=0.5
20
0
t
二阶系统分析
3、临界阻尼( =1 )
特征根
p1,2 n
阶跃响应:
yt 1 e n t1 n t
42
稳定性分析及代数判据
解:系统闭环特征方程为 s36s25sK0
列劳斯表
s3
1
5
s2
6
K
s 30 K 0
6
s0
K
稳定必须满足
30 K 0 6
第四节高阶系统分析
5
三阶系统单位阶跃响应
e p3t c(t ) 1 2 ( 2) 1 e nt [ 2 ( 2) 1] 2 2 { ( 2) cos d t sin d t}, t 0 2 ( 2) 1 1
1 10 1 10 1 1 1 C ( s) ( s) s s( s 1)(s 10) s 9 s 1 9 s 10
c(t ) 1 10 t 1 10t e e 9 9
Sunday, March 31, 2019
11
高阶系统的定性分析
零点的影响 零点不影响响应的形式。零点只影响各项的系数。零点若 靠近某个极点,则该极点对应项的系数就小。 偶极子 若有一对零极点之间的距离是极点到虚轴距离的十分之一 以上,这对零极点称为偶极子。偶极子对瞬态响应的影响可以 忽略。 系数 a j , l , l 取决于零、极点分布。有以下几种情况: 若极点远离原点,则系数小; 极点靠近一个零点,远离其他极点和零点,系数小; 极点远离零点,又接近原点或其他极点,系数大。
c(t ) a0 et (1 cosd t 1 sin d t )
Sunday, March 31, 2019
13
主导极点及应用
[利用主导极点的概念可以对高阶系统的特性做近似的估计分析]
具有主导极点的高阶系统可近似为二阶或一阶系统。此时 高阶系统的特性可用等效低阶系统的特性做近似的估计分析。 高阶系统近似简化原则: 在近似前后,确保输出稳态值不变; 在近似前后,瞬态过程基本相差不大。 具体规则是:在时间常数形式的开环或闭环传递函数上略去小 时间常数。
衰减慢且系数大的项在瞬态过程中起主导作用。
Sunday, March 31, 2019
自控理论 3-4高阶系统分析

C(t) 1.16 1.0 0.05
t
3.2 4.6 7.0
作图得 σ % = 16%
t r = 3.2
t p = 4.6
ts = 7
ω n = 0.8
可作为主导极点, β = 10.5, s1 s2 可作为主导极点, ζ = 0.5 原系统闭环增益 K = Φ ( 0) = 1
利用主导极点近似成二阶系统后,应保持Φ(0)不变。 Φ(0)不变 利用主导极点近似成二阶系统后,应保持Φ(0)不变。
式中 s1, 2 = −ζω n ± jω n 1 − ζ
2
1 增加闭环极点: 增加闭环极点:s 3 = − T
单位阶跃响应
e s 3t e − ζωn t c( t ) = 1 − − 2 βζ ( β − 2) + 1 βζ 2 ( β − 2) + 1 βζ ζ 2 ( β − 2) + 1 2 sin ω d t βζ ( β − 2) cos ω d t + 1−ζ 2
[
]
( 3 − 67 )
jω ω
式中 β =
ζω n
s3
− s3
s1
- ζωn σ 0
取ζ=0.5,以β为参变量作 =0.5, c(t)和 ωnt 的关系曲线 。 (t)和 图3-31
s2
结论
(1)附加一个闭环极点, 将使 σ%↓ ,r ↑, tp ↑。 t (2)增加的极点离虚轴越近上述影响越显著。 , 上述影响越显著。 (3)当β < 1, 呈现过阻尼响应迟缓。 ,响应迟缓。 (4)当β闭环主导极点
1.定义 对系统的暂态响应起主导作用的极点。 定义 对系统的暂态响应起主导作用的极点。 2.满足以下两个条件: 满足以下两个条件: 满足以下两个条件 (1)距虚轴比较近 且附近没有其它的闭环零点与极点。 距虚轴比较近,且附近没有其它的闭环零点与极点 距虚轴比较近 且附近没有其它的闭环零点与极点。 (2)其实部的绝对值应比其它极点的实部绝对值小五 其实部的绝对值应比其它极点的实部绝对值小五 倍以上。 倍以上。 靠近虚轴的极点相对于远离虚轴的极点来说, 靠近虚轴的极点相对于远离虚轴的极点来说, 其所对应的响应分量,随时间的推移衰减的慢, 其所对应的响应分量,随时间的推移衰减的慢, 因而在系统的时间响应过程中起主导作用; 因而在系统的时间响应过程中起主导作用;而远 离虚轴的极点由于其对应的分量随时间的推移衰 减的快, 减的快,所以可在高阶系统分析中略去远极点对 系统响应的影响。 系统响应的影响。
3-4高阶系统的时域分析
h(t ) = 1 -
1
e - sot
bz 2(b - 2) + 1
-
e - zwn t
[bz 2(b -
bz 2(b - 2) + 1
2) cos wn
1- z 2t
bz (z 2(b - 2) + 1)
+
1- z2
sin wn
1- z2t]
由于
b 2 ( b 2 ) 1 2 ( b 1 ) 2 ( 1 2 ) 0 , b S 0 /w n
2、 超调量的计算
n
m
si
s% i3 n
s1 zi
i1
estp 10% 0
m
s1 si
zi
i3
i1
结论: (1)闭环零点会减小系统阻尼。 (2)闭环非主导极点会增大系统阻尼。 (3)若系统不存在闭环零点和非主导极点,则
s%e/ 12 10% 0
3、 调节时间的计算
s i为 D ( s ) 0 的 根 , 称 为 闭 环 极 点 。
当输入为单位阶跃函数时,
m
K (szi)
C (s)q
i 1 r
(ssj) (s22k
ksk 2)1 sA s0jq 1s A jsjkr 1s2 B 2 ksk k C skk 2
ts 1n ln2
n
si
i2 n
s1 si
m
s1 zi
i1 m
zi
i2
i1
结论:
(1)闭环零点越接近虚轴,峰值时间越小,超调量 和调节时间越大;
第四章 频域分析(第四-六节)
-20 -20
/(rad s 1 )
K
-40
/(rad s 1 )
K
b)
-40
a)
(3) Ⅱ 型 系 统 n = 2 , 其 低 频 段 是 斜 率 为 - 4 0 d B / d e c 的 直 线 , 该 直 线 或 其 延 长 线 与 0 d B 线 ( 横 轴 )的 交 点 频 率 为 w a , 此 时 , K = w a。
p
= e
- xp /
1- x
2
和谐振峰值M
r
= 1 / 2x 1- x
2
可 以 看 出 , 它 们 均 随 着 阻 尼 比 x的 增 大 而 减 小 。 由 此 可 见 , M r 越 大 的 系 统 , 相 应 的 M p也 越 大 , 瞬 态 响 应 的相对稳定性越差。为了减弱系统的振荡性,同时使 系 统 又 具 有 一 定 的 快 速 性 , 应 当 适 当 选 取 M r值 。 如 果 M r 取 值 在 1< M r < 1 .4 范 围 内 , 相 当 于 阻 尼 比 x 在 0 .4 < x < 0 .7 范 围 内 , 这 时 二 阶 系 统 阶 跃 响 应 的 超 调 量 M p < 25% 。
= e
由 此 可 见 , 最 大 超 调 量 M p和 谐 振 峰 值 M r都 随 着 阻 尼 比 x的 增 大 而 减 小 。 同 时 随 着 M r的 增 加 , 相 应 地 M p也 增 加 , 其 物 理 意 义 在 于 : 当 闭 环 幅 频 特 性 有 谐 振 峰 值 时 , 系 统 的 输 入 信 号 的 频 谱 在 w = w r附 近的谐波分量通过系统后显著增强,从而引起振 荡。
微分方程第四节高阶线性方程

高阶线性方程的未来研究方向
高效求解算法研究
针对高阶线性方程的特点,研究更为高效和稳定的数值求解算法,以提ห้องสมุดไป่ตู้计算效率和精 度。
多物理场耦合的高阶偏微分方程组研究
随着科学技术的不断发展,多物理场耦合的问题越来越受到关注,研究这类问题需要发 展高阶偏微分方程组的方法。
非线性高阶方程的研究
非线性高阶方程在自然界和工程领域中广泛存在,研究这类方程的解的性质和求解方法 具有重要意义。
微分方程第四节高 阶线性方程
目录
• 高阶线性方程的定义与性质 • 高阶线性方程的解法 • 高阶线性方程的应用 • 高阶线性方程的扩展与展望
01
CATALOGUE
高阶线性方程的定义与性质
高阶线性方程的一般形式
高阶线性方程的一般形式为:$y^{(n)}(x) + a_{n1}(x)y^{(n-1)}(x) + a_{n-2}(x)y^{(n-2)}(x) + ldots + a_1(x)y'(x) + a_0(x)y(x) = f(x)$,其中$n geq 2$,$a_i(x)$ 和$f(x)$是已知函数,$y(x)$是未知函数。
延迟高阶线性方程
这类方程在描述物理、工程和经 济等领域的问题时具有广泛应用 ,如描述人口增长、信号传输等 。
非齐次高阶线性方
程
这类方程在解决实际问题时经常 出现,如求解波动方程、热传导 方程等。
耦合高阶线性方程
组
这类方程组在描述多个相互作用 的物理量时出现,如弹性力学、 流体力学等。
高阶线性方程与其他数学领域的联系
积分因子法
总结词
通过引入积分因子将高阶线性方程转化为可求解的一阶 微分方程组。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
推导单位阶跃响应(当所有闭环极点互不相等,且0 l 1 )
Y (s)
A0 s
n1 j 1
Aj s pj
n2 l 1
Bl (s l nl ) Clnl 1 l 2
ห้องสมุดไป่ตู้
s2
2
l nl s
2 nl
3.4.2 高阶系统的瞬态响应
Y (s)
A0 s
A n1 j
j1 s p j
n2 l 1
3.4 高阶系统的时域分析
3.4.1 三阶系统的瞬态响应 3.4.2 高阶系统的瞬态响应 3.4.3 闭环主导极点
3.4.1 三阶系统的瞬态响应
在控制工程中,几乎所有的控制系统都是高阶系统,即 用高阶微分方程描述的系统。
对于不能用一、二阶系统近似的高阶系统来说,确定其 动态性能指标是比较复杂的。
n2 p3 2ns n2 )(s
p3 )
1 s
A0 s
s2
A1s A2
2ns n2
A3 s p3
式中:A0 [sY (s)] |s0 1
由
Y
( s)( s 2
2
ns
n2 )
|
s
jn
1
2
( A1s
A2 )
|
s
jn
1 2
可得:A1
2
2 ( ( 2)
2) 1
A2
[2 2 ( 2) 1]n 2 ( 2) 1
4.阻尼系数对三阶系统的影响与对二阶系统的影响相似。
3.4.1 三阶系统的瞬态响应--单位阶跃响应
y(t)
1.4
1.2
2
1
p3 n
0.8 4
1
0.6
0.4
0.2
0
nt
0 1 2 3 4 5 6 7 8 9 10 11 12
图中 ,表示无实极点。由图可见,加入实极点后,当不变 时,超调量下降了,但调节时间增加了。
p1
p1 n jn 1 2
p2 n jn 1 2
n p3
Im jn 1 2
Re
p3
1 T
p2
jn 1 2
这相当于在典型二阶系统的基础上增加了一个惯性环节,或 增加了一个实极点。
3.4.1 三阶系统的瞬态响应--单位阶跃响应
三阶系统的单位阶跃响应的表达式:
Y (s)
(s2
p3 n
表示实极点和共 轭复极点的相对 位置。
同理: A3
[( s
p3)Y (s)]
|s p3
1
2 (
2)
1
3.4.1 三阶系统的瞬态响应--单位阶跃响应
三阶系统的单位阶跃响应如下:
e p3t
y(t) 1 2 ( 2) 1
ent
2 ( 2)
{
1
2 (
2) c osd t
[
2( 1
2)
2
1] sindt},t
0
三阶系统的单位阶跃响应的紧凑形式如下:
y(t)
1
2
e
(
p3t
2)
1
式中: d n 1 2
1
2
ent 2(
2)
1
s in(d t
),t
0
tg 1
( 2) 2(
1 2
2) 1
3.4.1 三阶系统的瞬态响应--单位阶跃响应
为参变量时三阶系统的单位阶跃响应曲线
Bl (s l nl ) Clnl 1 l 2
s2
2 l nl s
2 nl
A0是Y(s)在输入信号极点(s=0)处的留数,Aj是Y(s)在实数极
点(s=-pj)处的留数。Bl和Cl分别为Y(s)在共轭复数极点处留数
的实部和虚部。
m
A0
lim sY (s) s0
b0 a0
n1
kg zi
C e lnlt l
sin nl
l 1
l 1
由此可见:
1 l 2 t,t 0
⒈高阶系统的阶跃响应由简单函数项组成,即由一阶、二
阶系统的响应组成。
⒉ y(t)不仅与闭环极点 p j、 l nl j
3.4.2 高阶系统的瞬态响应
高阶系统分析:
(s) Y(s) G(s) R(s) 1 G(s)H (s)
设:G(s) A(s),H (s) C(s)
B(s)
D(s)
(s)
A(s)D(s)
A(s)C(s) B(s)D(s)
R(s)
Y (s)
G(s) H (s)
闭环传递函数的零点由前向传递函数的零点和反馈传 递函数的极点构成。
工程上常采用闭环主导极点的概念对高阶系统进行近似 分析从而得到高阶系统动态性能指标的估算公式。
对于不能简化为低阶系统的高阶系统,可采用数值计算 的方法进行仿真,得出系统的瞬态性能指标。
3.4.1 典型三阶系统的瞬态响应
传递函数:(s)
Y (s) R(s)
(Ts
1)(s2
n2 2ns
n 2
)
当 0 < < 1 时,极点分布如下:
3.4.2 高阶系统的瞬态响应
高阶系统传递函数的一般形式为:
(s)
bmsm an s n
bm1sm1 ... b0 an1sn1 ... a0
mn
写成零极点形式:
m
kg (s zi )
(s) n1
i1 n2
(s p j ) (s2 2 kk s k2 )
j1
k 1
n1 2n2 n,m n
i 1
n2
pj
2 nl
j 1
l 1
Aj
lim (s
s p j
pj )Y (s),j
1,2,...,n1
Bl和Cl的计算略。
3.4.2 高阶系统的瞬态响应--单位阶跃响应
高阶系统的单位阶跃响应
y(t) A0 n1 Aj e p jt j 1
n2
n2
B e lnlt l
c os nl
1l2t
y(t)
1.2
1
54
0.8
3
0.6
2
1: 0.5
1
2 : 1.0
0.4
3 : 2.0
0.2
p3 4 : 4.0
0
n 5 :
0 1 2 3 4 5 6 7 8 9 10
nt
当=无穷大时,即负实极点远离虚轴时,三阶系统即为典 型二阶系统的瞬态响应曲线。在一般情况下,0<<无穷大, 因此具有负实极点的三阶系统,比较二阶系统而言,其瞬态
响应的振荡性减弱,超调量减小,调节时间增加,也就是相
当于系统的惯性增加了。
3.4.1 三阶系统的瞬态响应--单位阶跃响应分析
y(t)
1
2
e (
p3t
2)
1
1
2
ent 2(
s in(d t 2) 1
),t
0
[分析]:三阶系统的单位阶跃响应由三部分组成:稳态项,共 轭复极点形成的振荡分量,实极点构成的衰减指数项分量。
⒈当>>1时,表示实极点远离虚轴,共轭复极点离虚轴近, 系统的瞬态特性主要由共轭复极点决定,呈二阶系统的特性, 即系统的特性由二阶系统的特征参数和n决定。
⒉当<<1时,表示实极点离虚轴近,共轭复极点离虚轴远, 系统的瞬态特性主要由实极点决定,呈一阶系统的特性。
⒊一般情况下三阶系统的阶跃响应与实极点和共轭复极点的 相对位置有关。