电动液压助力转向系统用BLDCM工作原理及控制策略
电动助力转向系统工作原理
电动助力转向系统工作原理电动助力转向系统是现代汽车上常见的一种辅助驾驶系统,它通过电力辅助驾驶员转动方向盘,提供更轻松的转向操作。
本文将详细介绍电动助力转向系统的工作原理。
电动助力转向系统主要由电机、传感器、控制器和转向助力装置组成。
当驾驶员转动方向盘时,传感器会感知到方向盘的转动角度和力度,并将这些信息传送给控制器。
控制器根据传感器的信号来判断驾驶员的意图,然后通过控制电机的工作状态来提供相应的转向助力。
电动助力转向系统的工作原理可以简单描述为,当驾驶员施加力量转动方向盘时,传感器感知到了这一动作,并将信号传送给控制器。
控制器根据传感器信号来判断驾驶员的转向意图,然后控制电机的工作状态来提供相应的转向助力。
电机通过转向助力装置作用于转向机构,从而减小驾驶员需要施加的转向力,使转向操作更加轻松。
电动助力转向系统的工作原理可以通过以下几个方面来解释:首先,传感器感知驾驶员的转向操作。
传感器能够感知方向盘的转动角度和力度,将这些信息传送给控制器。
其次,控制器判断驾驶员的转向意图。
控制器通过分析传感器传来的信号,来判断驾驶员的转向意图,然后控制电机的工作状态。
最后,电机提供相应的转向助力。
根据控制器的指令,电机通过转向助力装置作用于转向机构,提供相应的转向助力,减小驾驶员需要施加的转向力。
总的来说,电动助力转向系统通过传感器感知驾驶员的转向操作,控制器判断驾驶员的转向意图,并通过电机提供相应的转向助力,从而使转向操作更加轻松。
这种系统在提高驾驶舒适性的同时,也提高了驾驶安全性,是现代汽车上不可或缺的重要辅助系统之一。
以上就是电动助力转向系统的工作原理,希望能对大家有所帮助。
新能源汽车电动助力转向系统的工作原理
新能源汽车电动助力转向系统的工作原理新能源汽车电动助力转向系统的工作原理,听起来好像很高大上,让人有点摸不着头脑。
不过,别担心,我今天就来给大家揭开这个神秘面纱,让大家对它有个更清晰的认识。
我们来了解一下什么是电动助力转向系统。
简单来说,它就是一种利用电能来帮助汽车转向的装置。
听起来是不是有点像我们小时候玩的电动车?只不过这个“电动车”可不仅仅是个玩具,它还是我们驾驶汽车时的重要助手。
那么,电动助力转向系统是如何工作的呢?其实,它的原理很简单:当我们转动方向盘时,电动助力转向系统会通过传感器感知到这个动作,然后根据一定的计算公式,给出一个相应的电信号,让电动机产生相应的扭矩,从而帮助我们轻松地完成转向。
接下来,我们再来详细说说电动助力转向系统的各个部分。
首先是传感器,它的作用就是感知方向盘的转动情况。
一般来说,电动助力转向系统中会有多个传感器,分别安装在不同的位置,以确保对方向盘的全方位感知。
这些传感器可以感知到方向盘的微小变化,让我们在驾驶过程中更加轻松自如。
有了传感器的信号,接下来就要进入计算机进行计算了。
这里的计算机可不是我们平时用的电脑或者手机,而是专门为电动助力转向系统设计的微控制器。
它会根据传感器传来的数据,结合一些预设的参数,进行复杂的计算,最终得出一个合适的电信号。
这个过程就像是我们在做数学题时,先看题目要求,然后列出方程组,最后解出答案一样。
计算出了电信号之后,就要交给电动机来执行了。
电动机其实就是一个小小的发电机,它会根据电信号产生相应的扭矩,从而帮助我们完成转向。
这个过程就像是我们在用力拧开瓶盖时,手指关节处会产生一定的力量一样。
我们还要说一说电动助力转向系统的另一个重要组成部分:电池。
电池负责为整个系统提供源源不断的动力。
当我们驾驶汽车时,电池会为电动机提供能量,让它产生扭矩;当我们停车等待时,电池则会为其他系统提供能源。
可以说,电池是整个电动助力转向系统的核心部件。
总的来说,电动助力转向系统的工作原理就是:通过传感器感知方向盘的转动情况,然后由计算机进行计算,得出合适的电信号;接着将电信号传递给电动机,让它产生扭矩;最后在整个过程中,电池扮演着至关重要的角色。
电动助力转向系统BLDC电机控制模块设计
电动助力转向系统BLDC电机控制模块设计摘要由于电动助力转向(EPS)系统具有高性能、高效率、低成本、节能环保等优点,随着汽车电子技术的发展,电动助力转向技术逐渐取代传统的液压助力转向(HPS),成为转向助力技术的主流。
目前,EPS 的助力电机多采用传统的永磁直流电机,直流电机所用电刷产生的机械摩擦,带来了噪声、火花、电磁干扰以及寿命短等致命弱点,降低了 EPS 的可靠性和安全性能。
因此,开发一种新型的、适应于 EPS 的驱动电机—无刷直流电机,对提高 EPS 的性能具有重要意义。
本文在详细了解EPS系统性能要求和工作原理的基础上,对各种已有的EPS助力电机进行了总结和比较。
对比结果表明,无刷直流电机(BLDC)凭借其显著的优点,成为EPS助力电机的较优选择。
本文研究开发了 EPS 用无刷直流电机控制系统,论文的主要工作有:1)分析了无刷直流电机的结构、工作原理。
并从电磁因素、电流换向、齿槽因素、电枢反应机械工艺等方面分析和研究了造成转矩脉动的原因,提出了改进措施。
2)构建了以Microchip公司的dsPIC33FJ12MC202微处理器作为控制核心的无刷直流机控制系统,设计了系统的硬件电路,编写调试了相应的控制程序,设计了无刷直流电机的控制系统。
实验表明:无刷直流电机体积小、出力大、机械特性好,是 EPS 的理想驱动电机。
开发的无刷直流电机控制器成本低廉,性能可靠,符合 EPS 助力平顺、方便操纵、实时性高的要求,为后续的研究工作提供了良好的开发、测试平台。
关键词:电动助力转向;无刷直流电机;dsPIC33FJ12MC202;控制系统AbstractAs the electric power steering (EPS) system with high performance, high efficiency, low cost , energy saving , etc., with the development of automotive electronics technology, electric power steering technology is gradually replacing the traditionalhydraulic power steering (HPS), became steering technology mainstream .Currently , EPS booster motors use more conventional permanent magnet DC motors, DC motors brush mechanical friction , bringing noise , sparks , electromagnetic interference , and short life fatal weakness , reducing the reliability and security of EPS performance . Therefore , the development of a novel , adapted EPS drive motor - brushless DC motor, to improve the EPS performance is important.In this paper, a detailed understanding of the EPS system performance requirements and works on the basis of various existing EPS booster motors were summarized and compared. Comparative results show that the brushless DC motor (BLDC) With its significant advantages to become the optimum choice EPS booster motor. In this paper, the research and development of EPS Brushless DC motor control system , the paper's main tasks are:1 ) analyzes the structure of brushless DC motor works. From electromagnetic factors , current commutation , alveolar factors , technology and other aspects of mechanical armature reaction analysis and study of the causes of torque ripple , the proposed improvements.2 ) constructed with Microchip 's dsPIC33FJ12MC202 microprocessor as the core control brushless DC motor control system , the hardware circuit design , write and debug the corresponding control procedures designed brushless DC motor control system .Experimental results show that : the brushless DC motor , small size , large output , good mechanical properties, is ideal for EPS drive motor . Low cost brushless DC motor controller developed , reliable performance , in line with EPS power smooth , easy manipulation, high real-time requirements, providing a good development for subsequent studies , the test platform.Keywords :electric power steering ; brushless DC motor ; dsPIC33FJ12MC202; Control System目录摘要 (1)Abstract (2)第一章绪论 (4)1. 1 引言 (4)1. 2 课题研究的目的和意义 (4)1. 3 电动助力转向系统的发展历程和研究现状 (6)1. 4 EPS系统原理 (7)1. 5 EPS用助力电机概述 (8)1. 6 无刷直流电动机概述 (10)1. 7 课题研究的主要内容 (12)第二章 EPS用永磁无刷直流电动机的设计 (12)2. 1 电机结构型式的选择 (12)2. 2 永磁无刷直流电动机的设计概述 (15)2. 3 电磁负荷和电机主要尺寸 (16)2. 4 样机的主要参数 (17)2. 5 本章小结 (18)第三章EPS用无刷直流电动机控制系统的设计 (18)3. 1EPS控制系统概述 (18)3. 2 无刷直流电机控制系统的设计 (21)3. 3主控电路 (23)3. 4功率及驱动电路 (28)3. 5控制系统软件设计 (31)3. 6 硬件电路及实验结果 (33)3. 7 本章小结 (34)结论 (35)参考文献(References) (36)致谢 (37)第一章绪论1.1 引言汽车转向系统的性能直接影响到汽车的操纵稳定性,对于确保车辆的安全行驶,减少交通事故以及保护驾驶员的人身安全,改善驾驶员的工作条件起着重要的作用。
电动液压助力转向系统用BLDCM工作原理及控制策略
电动液压助力转向系统用BLDCM 工作原理及控制策略文章编号:1001-3997(2010)03-0262-02【摘要】电动液压助力转向系统(EHPS )将传统液压助力转向系统(HPS )中的液压泵改为由变成单独的电机驱动,并根据不同车速和转向盘转速控制等级转速,从而提供可变的转向助力,同时在一定程度上节省了能源的消耗。
对POLO 轿车装备的EHPS 系统的电流无刷电机工作原理进行深入分析,并针对该电机设计控制器及制定相应控制策略,实现对电机转速的控制。
关键词:电动液压助力转向;直流无刷电机;电机控制【Abstract 】The Electro-hydraulic Power Steering System (EHPS )drives a hydraulic pump with a sep -arate motor ,in contrast to the traditional Hydraulic Power Steering System (HPS )doing so by the engine.In this way ,EHPS shall be able to provide alterable steering force according to different vehicle speeds and steering wheel ratatioanl speeds ,and to save energy in a more effective way.It mainly discusses the Basic Principle and Control Strategy of the Brushless Direct Current (BLDC )Motor Used in the Electro-hydraulic Power Steering system from POLO ,and designs an ECU with control strategy to control the motor.Key words :EHPS ;BLDC motor ;Motor control1引言传统的液压助力转向系统(HPS )通过汽车发动机带动液压泵以提供转向助力,因此无论驾驶员是否进行转向操作,只要发动机在运转,HPS 都处于工作状态,造成了不必要的能源浪费。
BLDC电动机本体设计及控制原理(详细版)
BLDC电动机本体设计及控制原理(详细版)一、引言直流无刷电动机(Brushless DC Motor,BLDC)是近年来研究与应用领域日益扩大的电机类型。
它具有高效率、高转矩、低噪音、长使用寿命等优点,广泛应用于电动汽车、航空航天、家用电器、微型机器人等领域。
本文主要论述BLDC电动机本体设计及控制原理。
二、BLDC电动机结构及工作原理BLDC电动机主要由转子、定子、传感器、电路控制系统等部分组成。
1. 转子转子是BLDC电动机的核心部分,主要由磁铁和轴组成。
磁铁通常采用强磁性永磁体,由于磁阻较小、磁延迟性小,因此稳定性好,容易控制。
轴材料通常为钢铁材料,既满足强度要求,又具备较高的刚度。
转子采用永磁体的励磁方式,可以降低电机的故障率。
2. 定子定子是BLDC电动机的外部部分,主要由铁芯和绕组组成。
定子铁芯通常由硅钢片穿插叠压而成,目的是避免铁芯中涡流的损耗。
绕组则由若干个线圈组成,其数量与定子极数有关。
3. 传感器传感器主要包括霍尔元件和编码器。
霍尔元件主要用于检测转子磁极位置,编码器用于检测转子具体位置。
这些传感器输出的信号可以通过控制器计算得到电机的精确位置和转速。
4. 电路控制系统电路控制系统主要由驱动电路和控制器组成。
由于BLDC电机是三相交流电机,因此需要采用三相桥式电路进行驱动。
这种电路可以通过PWM技术实现精确的电机控制。
BLDC电动机的工作原理是依靠磁场作用产生电动力矩,具体而言,是依靠定子电流的旋转磁场作用与永磁体产生相互作用力而产生电动力矩的。
BLDC电机通过不断改变定子电流方向和大小来控制电机的转速和方向。
三、BLDC电动机控制原理1. 电机转速控制为了实现BLDC电动机的精确控制,需要对电机的转速进行控制。
一般采用PID控制算法对电机进行控制。
PID算法通过将实际转速与设定值进行比较,计算出误差,然后根据误差大小来调整控制电压的大小和方向。
这种方法可以有效地降低电机的振动和噪声,提高电机的精度和稳定性。
高效率BLDC无刷直流电机控制原理、控制设计计算方法及步骤(图文并茂详解)

高效率BLDC无刷直流电机控制原理、控制设计计算方法及步骤(图文并茂详解)一、空载时间插入与补充:1、大多数BLDC电机不需要互补的PWM、空载时间插入或空载时间补偿。
2、可能会要求这些特性的BLDC应用仅为高性能BLDC伺服电动机、正弦波激励式BLDC电机、无刷AC、或PC同步电机。
3、控制算法许多不同的控制算法都被用以提供对于BLDC电机的控制。
4、典型做法是,将功率晶体管用作线性稳压器来控制电机电压。
当驱动高功率电机时,这种方法并不实用。
5、高功率电机必须采用PWM控制,并要求一个微控制器来提供起动和控制功能。
二、BLDC无刷直流电机控制原理:1、无刷电机属于自换流型(自我方向转换),因此控制起来更加复杂。
2、BLDC电机控制要求了解电机进行整流转向的转子位置和机制。
3、对于闭环速度控制,有两个附加要求,即对于转子速度或电机电流以及PWM信号进行测量,以控制电机速度以及功率。
4、BLDC电机可以根据应用要求采用边排列或中心排列PWM信号。
5、大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。
这就提供了最高的分辨率。
6、如果应用要求服务器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。
7、为了感应转子位置,BLDC电机采用XXX效应传感器来提供绝对定位感应。
这就导致了更多线的使用和更高的成本。
无传感器BLDC控制省去了对于传感器的需要,而是采用电机的反电动势(电动势)来预测转子位置。
8、无传感器控制对于像风扇和水泵这样的低成本变速应用至关重要。
9、在采用BLDC电机时,冰箱和空调压缩机也需要无传感器控制。
三、BLDC高效率无刷直流电机控制算法方法及步骤:1、提供的三项功能:⑴、用于控制电机速度的PWM电压;⑵、用于对电机进整流换向的机制;⑶、利用反电动势或传感器来预测转子位置的方法;2、脉冲宽度调制仅用于将可变电压应用到电机绕组。
有效电压与PWM占空比成正比。
3、当得到适当的整流换向时,BLDC的扭矩速度特性与以下直流电机相同。
电动助力转向的工作原理
电动助力转向的工作原理电动助力转向,这个名字听起来挺高大上的,其实它的原理相当简单。
想象一下,你在开车,转动方向盘时,突然觉得轻松了很多,不再像以前那样拼命使劲。
哎,这可不是魔法,而是电动助力转向在帮你出力。
你知道吗?它的核心就是一个小小的电机。
平时开车,方向盘有时候像是打了滑,费劲得很。
但有了电动助力转向,转向变得就像在水中游泳,轻松又自在。
你要知道,电动助力转向和传统的液压助力转向可不太一样。
液压的系统里需要油液,这玩意儿要不断地循环,复杂得很。
而电动的就简单多了,电机直接给力。
转向的时候,传感器会感应到你使的力,然后电机就会自动调整,给你提供合适的助力。
真是聪明得令人咋舌。
很多车主都发现,开着开着就觉得车子跟着自己的心意走,省力又省心。
试想一下,早上开车上班,不再需要憋着一口气,轻轻一转,方向就到了,心情瞬间好很多。
再说说安全性。
电动助力转向在高速行驶时,能够提供更好的稳定性。
你知道,车速快了,方向盘会有些飘。
这时候,电动助力就显得格外重要。
它可以根据车速来调整助力的大小,低速时,助力强;高速时,助力弱,这样能保证驾驶的精准度。
开车的人都明白,精准转向多么关键,尤其是在复杂的路况中。
电动助力转向的智能调节就像是一位贴心的助手,让你在关键时刻能稳稳当当地应对各种挑战。
这种转向系统也对节能有帮助哦。
传统液压系统需要发动机运转来提供动力,而电动的则是根据需要来发力,完全不浪费。
车主们都知道,油价越来越高,省油可是个技术活。
而电动助力转向就好像是给你省了一笔不小的开支。
你看,这一来二去,电动助力转向的好处真是数不胜数。
有人会问,这电动助力转向的缺点是什么?其实嘛,虽然它的优点多多,但也不是没有缺点。
电机如果坏了,修起来可麻烦。
这种情况虽然不常见,但一旦出现,车主可得小心了。
不过,现在的技术越来越成熟,故障率也大大降低了,绝大多数车主是不会遇到这个烦心事的。
还有一点,不同的车型,电动助力的感觉也不尽相同。
电动转向助力系统的工作原理
电动转向助力系统的工作原理《电动转向助力系统的工作原理》1. 引言你有没有想过,为什么现在开车的时候,转动方向盘感觉那么轻松呢?这可多亏了一个神奇的系统——电动转向助力系统。
今天呢,咱们就来好好扒一扒这个电动转向助力系统背后的工作原理,让你从它的基本概念到实际应用,从可能存在的误解到相关的趣味知识,全都了解得明明白白。
这篇文章呢,会先从基础的概念讲起,再深入到它的工作过程,接着看看在生活和高级技术中的应用,还有那些容易让人误解的地方,最后再补充一些相关知识,并且对这个系统的未来做个小小的展望。
2. 核心原理2.1基本概念与理论背景电动转向助力系统,说白了,就是一个帮你轻松转动方向盘的系统。
它的理论来源其实就是为了改善传统机械转向系统的不足。
以前没有这个系统的时候,咱们开车转动方向盘那可全靠自己的力气,尤其是在停车或者低速转弯的时候,那真叫一个费劲。
这个系统的发展历程呢,也是随着汽车技术不断发展而发展的。
一开始,汽车工程师们就琢磨着怎么能让驾驶更轻松,于是就慢慢有了转向助力的概念,从最开始的液压转向助力,到现在的电动转向助力。
电动转向助力系统的核心概念就是通过电机提供助力,根据驾驶情况来调整助力的大小。
2.2运行机制与过程分析这个系统的运行机制就像是一个贴心的小助手,时刻在观察着你的驾驶动作。
当你开始转动方向盘的时候,方向盘上的传感器就像是眼睛一样,它能察觉到你转动方向盘的方向和力度。
比如说,你要向左转弯,传感器就会把这个信号发送给控制器。
控制器就像一个大脑,它接收到信号之后,就会根据预先设定好的程序计算出需要给电机发出多少助力的指令。
这电机呢,就像是一个大力士,收到指令后就开始工作,给转向系统提供助力。
打个比方啊,就好像你要搬一个很重的东西,一个人搬很吃力,这时候来了一个朋友,他根据你用力的大小来帮忙,你用的力小,他就多使点劲,你用的力大了,他就少使点劲,这个电机就像这个朋友一样,根据你转动方向盘的情况来提供助力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
★采徜H别:20019—05一12
._●¨.-·····¨··●··...·●··¨····.-.···....···…·h岫_J··¨¨...n¨~..-·●··_··●·.¨¨●··-··●··...·●·...·-..."·,··¨·p··*·d·Ⅲ··●·m“●·…·●·h..J·m.·‘hⅢ·●·…_·●·_..··●…·●··H一-啊¨h…w。州·…h·....●··*·pt啊_d··-·-k..·J…●_·_·_.-一J_·H·Jh.pJh
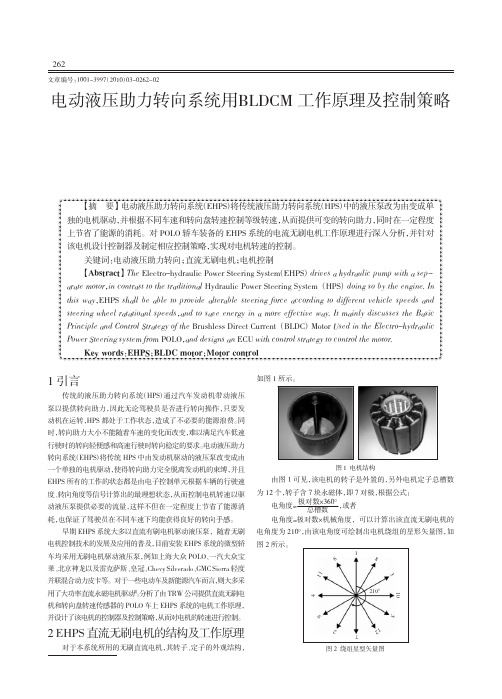
电角度=极对数×机械角度,可以计算出该直流无刷电机的 电角度为2100,由该电角度可绘制出电机绕组的星形矢量图,如 图2所示。
6
Jk
考
||N弋. 勿声_.
1二形
趴’
I
;
■
P
1 ,7
o
对于本系统所用的无刷直流电机,其转子、定子的外观结构,
图2绕组星型矢量图
万方数据
第3期
王维冬:电动液压助力转向系统用BLDCM工作原理及控制策略
中断处理可描述为:进入中断后首先立即保护现场,并启动
A,D转换。其次程序需根据车速传感器信号对当前车速进行判
定,并根据转向盘转角速度传感器信号做出相关计算确定转角速
度大小,由车速和转向盘转角速度来确定当前电机的目标转速。
当给出电机目标后程序经过电机的转速PI调节和电流PI调节
控制电机达到该目标转速,并完成电机的换相工作,最后中断退
用了大功率直流永磁庵棚珊j觌分析了由TRW公司提供殖暖沅刷电
机和转向盘转速传感器的POLO车上EHPs系统的电机工作原理, 并设计了该电机白勺控制器及控制策略,从而对电机的转速趁Fi控制。
2 EHPS直流无刷电机的结构及工作原理
图l电机结构
由图1可见,该电机的转子是外置的,另外电机定子总槽数
电角度=堡豁,或者 为12个,转子含7块永磁体,即7对极,根据公式:
速范围的电机转速特性曲线。主要的设计思想为,当转向盘转向
角速度传感器无输入信号或输入信号数值很小时(停止模式),电
机根据车速信号不同维持在某一恒定转速。当转速传感器输入信
号超过某—数值(助力模式),电机转速则根据目前的车速大小按不
同的比例线形增加,直至增加到电机转速的最大值。从图中可以看
C—U
CND
(Mechanical and Electrical Technology Dept.of JiangTnen Polytechnic College,JiangIIIen 529000,China)
一◆o◆‘◆。◆‘◆-●。◆。◆’◆o◆。◆。◆-◆·◆·◆-..P·‘●卜。‘●_·‘●P。◆o◆。◆。■■。◆-·。●’-1卜。1-。◆‘◆。◆-●。◆·◆-◆-◆o◆·◆。◆。◆-◆··●’·L
观察得到电机的四相绕组反电动势波形图及对应的换相控制字。
其次根据反电动势波形,记录每一相绕组的反电动势达到正峰值
时刻的换梧隆制字。最后i西过程序指令输出PWM信号以导i百该相。
换相控制字与换相的对应关系。如表l所示。
表1换相控制字与换相的对应关系
换相控制字 A
乒相通断状≮
D
出在线形阶段,车速越大,曲线的斜率越小,而车速越小,曲线的斜
3 EHPS用BLDCM控制策略
在实际EHPs系统中,电机的转速需要通过中央控制单元接 收外来的车速信号及方向盘转向角速度信号,并作出相关处理后 经查表后获得。
POLo车所用转向盘角速度信号来自海拉公司研制的感应 式位置传感器,该传感器可在一个简单、紧凑的空间条件下能够
方向盘转向角速度(%)
匿4控制策略中设计的电机转速特性
独的电机驱动,并根据不同车速和转向盘转速控制等级转速,从而提供可变的转向助力,同时在一定程度 上节省了能源的消耗。对POLO轿车装备的EHPS系统的电流无刷电机工作原理进行深入分析,并针对
该电机设计控制器及制定相应控制策略,实现对电机转速的控制。
关键词:电动液压助力转向;直流无刷电机;电机控制
【Abstract】Z‰Elect静士ydm“c P0wer Steering system(EHPs)撕es口锄饥姒如p配唧埘溉口sep一
丹i,lc咖如a以comr0Z&删e昌y矿tk Bmshless Direct Cun舢lt(BLDC)MobDr矾ed in琥e E%ct附也,,cfr础拖
只胱r跏e矗愕s声钯m加m POLo,帆d如s增弼肌ECU tl,砒c硎r0Z st删P昌y幻com,oZ舭脚妣
Key种竹wEoi_r矽竹d紫s竹: 砖。E秆H乃P‘竹S…; r,B7,L‘D■C÷一m-?■o‘t■o,r|;多秽M罗o秽rt1or c伽tr01
263
利用该星形矢量图,并根据四相绕组对称和合成转矩最大的 最小值和最大值无法达到咖100%,并且存在一定的信号上升
原则来分配各项绕组分别包含哪些槽导体圆。假设槽导体编号为 时间。将信号引入DsP的I幻口以便进行转向角速度计算处理。
l、8、3为A相,10、5、12为B相,7、2、9为c相,4、ll、6为D相。
4结束语 时,电机最高转速约为2700r/min,当电机受到外部干扰,例如突
加人为的阻力时,能够迅速地恢复到稳定状态。
本文详细讨论了POL0轿车使用的由TRw公司提供的EH一
电机加载液压泵及注入液压油后,根据程序中模拟的不通车 Ps系统中无刷直流电机的工作原理,并根据自行设计的EHPs系
出并恢复现场。中断处理程序流程,如图5所示。
暖蛰 I堡笙堡堑l
匪蜜固
二二二[= 土
转向角速度信号采集
转向角速度计算
是否该转速调节
整篁望竖}N
亟盔吁 电流Pl调节k一
由I换相l
眄l恢麦复知现场羽l
实现对线位移和角位移的非接触式测量,该传感器输出频率大致 不变,脉宽随转向盘位置变化而变的脉冲信号。该信号特点为,转
中图分类号:THl6文献标识码:A
1引言
如图1所示。
传统的液压助力转向系统(HPs)通过汽车发动机带动液压 泵以提供转向助力,因此无论驾驶员是否进行转向操作,只要发 动机在运转,HPs都处于工作状态,造成了不必要的能源浪费。同 时,转向助力大小不能随着车速的变化而改变,难以满足汽车低速 行驶时的转向轻便感和高速行驶时转向稳定的要求。电动液压助力
读表,确定目标转速}一
f退出中断
图5中断处理流程图
向盘角度增加,信号占空比随之增加。转向盘每转过600,信号波 形就重复变化一次。由于传感器设计上等因素,信号的占空比的
根据上述原理,初步设计了EHPS系统控制器,并进行试验。 电机空载实验中,当加载在功率管的PwM信号占空比为100%
万方数据
264 文章编号:100l一3997(20lO)03-0264-03
伽据瑚幻r,流co也瑚t幻沌抛鼢幻删Hydraulic Power Steering System(HPs)幽坛sD 6,,舭e蟛,le.h 晓括ll,够,EHPS s玩ff 6e口6如幻p聊池akrn6如s抛e^增如rce accD砌愕幻幽盼re,掂秽e^幻如印ee出帆d
s钯e矗,皤埘keZ rmm如田lz蔓pee出,m以幻s口£,e ene憎,,讥口,,m地嘎屏c£如e埘哆:死m面,毋d缸c獬ses咖e B傩记
为保证车辆在静止或低速行驶及快速操作转向盘时能够得
如图3所示,给出了该直流无刷电机的驱动电路图。
到较大助力,而车辆高速行驶及缓慢操作转向盘时得到较小助
力,甚至无助力,本文制定了针对该电机的控制策略,首先通过
MATLAB的intempl函数拟合了一组曲线,如图4所示。该组曲 线是制定控制策略的首要依据。图中的十一条曲线代表十一种车
转向系统(EHPs)将传统HPs中由发动机驱动的液压泵改变成由 —个单独的电机驱动,使得转向助力完全脱离发动机的束缚,并且 EHPs所有的工作的状态都是由电子控制单元根据车辆的行驶速 度、转向角度等信号计算出的最理想状态,从而控制电机转速以驱 动液压泵提供必要的流量,这样不但在一定程度上节省了能源消 耗,也保证了驾驶员在不同车速下均能获得良好的转向手感。 。
早期EHPs系统大多以直流有刷电机驱动液压泵,随着无刷 电机控制技术的发展及应用的普及,目前安装EHPs系统的微型轿 车均采用无刷电机驱动液压泵,例如上海大众POLO、一汽大众宝 莱、北京神龙以及雷克萨斯、皇冠、Chevy Silve瑚Ido、GMC siem轻度 并联混合动力皮卡等。对于—些电动车及新能源汽车而言,则大多采
机械设计与制造
Machinery Design & Manufacture
第3期 2010年3月
多工位级进模数字化解决方案
王树勋
(江门职业技术学院,江门529090)
The sOIutiOns 0f digital design in muIti—pOsitiOn prOgressiVe die WANG Shu—xun
图3直流无刷电机驱动电路图
当电机转子位置传感器信号输入至DsP后,DSP根据该换
相控制字决定A、曰、c、D四相中的某一相为当前所需导通相,并
通过输出PWM斩波信号控制某一功率管开关。当某一相绕组导
通后,电流经12V电源正端流过绕组,最后流过检测电阻至功率
地,其电流方向如图中实线所示。
该电机的四相绕组导通次序按下述方法确定。首先根据实验
i 【摘 要】用模具数字化设计的方法进行了多工位镪进模的设计。与传统的cAD设计方法相比,最大1
’的好处是工艺智能化仿真程度高,取代了原来的手掘模拟仿真过程,能够及时地发现设计错误并进行产品和!
模具设计的修改。这种数字化设计方法大大地提高了设计效率,是多工位级进模设计的一个发展方向。
:
关键词:PDw;多工位级进模;数字化设计;钣金设计;冲压件
hydrau¨c pOwer stee r-ng system