samson 3725 定位器
SAMSON 工业控制阀 定位器 3730-1 操作说明书

输出气量调整 Q(10)用于优化与不同气 动执行器配合的定位控制
紧密关闭功能:
一旦当输入控制信号低于 1%或高于 99% (详见通过参数 P10 和 P11 设置终端阀 位),气动执行器就会立即完全充气或排 空。
8
EB 8384-1 ZH
8
II 3 D IP 65 T 80 °C
外壳材料
标准铝材
0
不锈钢 1.4581
1
特殊类型
无
0
指定漆色涂覆
1
带 ¼ NPT 排气接口
3
特殊类型 无
000
6
EB 8384-1 ZH
技术数据
定位器
行程(可调)Hale Waihona Puke 行程范围 输入控制信号 w 最小电流
直接集成装配到 3227 型执行器:3.6~30mm 根据 IEC60534-6 标准连接:3.6~200 mm,或角行程执行器 24°~100°
EB 8384-1 ZH 5
选型
产品代码
3730-1 型 X 0 0 0 0 0 0 0 0 X 0 0 X 0 0 0
防爆保护
不带
0
根据ATEX指令的 II 2 G EEx ia IIC T6
1
根据FM/CSA指令的 Ex ia/Ex n
3
根据ATEX指令的 II 3 G EEx nA/nL II T6和
代码表…………………………………………………………..38
维护……………………………………………………………..42
防暴设备的维护………………………………………………..42
尺寸 mm ………………………………………………………..43
萨姆森定位器样本3

产品信息表 (Information Sheet ) T 8350 ZH 2010年1月版 1 阀门定位器(Positioners ) •转换器(Converters )阀位开关(Limit Switches ) •阀位变送器(Position Transmitters ) 电磁阀(Solenoid Valves ) •附件(Accessories )选择和应用(Selection and Application )相关信息表 T 8355 ZH 2010年1月版产品信息表 T 8350 ZH阀门定位器、转换器、阀位开关、阀位变送器、电磁阀和闭锁阀都是为使气动控制阀满足工业过程需要而设计的附属装置/附件。
空气过滤减压阀和气源减压组件用于为气动仪表提供合适的压缩空气。
阀门定位器用于按预先选定的阀位(被调参数x)和输入控制信号(给定值w)之间的对应关系进行准确定位。
阀门定位器将气动或电动控制设备(控制器、控制站、过程控制系统)输出的控制信号与控制阀的行程/开启角进行比较,进而产生一个气动输出压力(P st)(输出变量y)。
阀门定位器通常作为伺服放大器将低能量的输入控制信号转换为与其成比例的具有一定功率的输出信号压力,最大可到气源压力(6bar/90psi)。
阀门定位器可用于标准或分程控制。
根据输入控制信号类型,可分为气动阀门定位器(p/p)和电气阀门定位器(i/p)。
气动阀门定位器接受输入控制信号为0.2至1.0巴(3至15psi),进而产生最大6巴(90psi)的输出信号压力P st。
电气阀门定位器使用的输入控制信号为4至20mA或1至5mA直流电流信号,产生最大6巴(90psi)的输出信号压力(P st)。
3730-3型和3731-3隔爆型数字式电气阀门定位器附加有在现场设备与过程控制系统间的HART®通信。
3730-4型数字式电气阀门定位器带Profibus通信、3730-5型和3731-5隔爆型型数字式电气阀门定位器带Ff通信,为现场总线型智能阀门定位器,应用集成到现场总线系统的现场控制元件。
SAMSON智能定位器自整定步骤
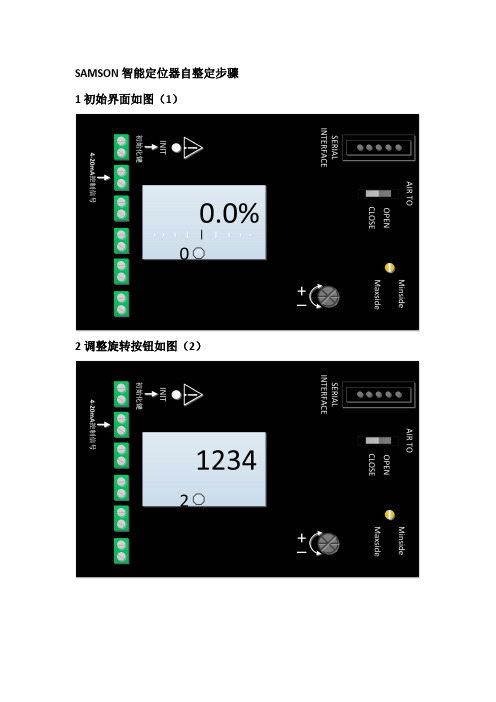
SAMSON智能定位器自整定步骤1初始界面如图(1)
2调整旋转按钮如图(2)
3调整旋转按钮至3选项如图(3)
按下旋钮后,旋转旋钮将NO改为YES后按下旋转按钮
4调整旋钮至图(4){销钉安装位置}
5调整旋钮至图(5){阀的公称行程}
6调整旋钮至图(6)
按下旋转按钮后,旋转按钮将NOM改为MAX,按住按钮确认
完成以上步骤后,用小螺丝刀捅入INIT圆孔内自整定开始
整定画面在TUNE和MAX中双向切换
整定结束后,显示屏画面出现WAIT如图
然后跳转到TEST,整定结束
另外通过第20项可选择特性,在广东石化所使用的SAMSON定位器中角行程普遍选择5选项即旋转阀芯阀线性,所对应的阀位显示为4mA-0%,8mA-35.6%,12mA-56.5%,16mA-75.4%,20mA-100%
具体特性数字为
0线性1等百分数2可逆等百分数3蝶阀线性4蝶阀等百分数
5旋转阀芯阀线性6旋转阀芯阀等百分数7部分球阀线性
8部分球阀等百分数9用户自定义
当定位器的屏幕上出现S字符时,需用通过第36项进行出厂设置旋转按钮调至36项后,找到std项,按住按钮即可。
SAMSON 调节阀定位器基本操作
SUB 初始化模式用于在生产过程进行中更换阀门定位器。为
此,可用机械方法将控制阀固定某个确定的阀位,或借助气动方式,即使
用外接气动信号使控制阀动作到某一个确定阀位。此固定住的阀位能够确
保生产装置能够正常运行。
更换上的阀门定位器不要初始化,如果需要,使用代码36 对定
模式,必须输入以下参数:销钉位置(代码4)及额定行程/转角(代码
5)。校验好的阀位传感器能够将有效行程预置得非常准确。初始化过程
中,定位器检查控制阀是否无碰撞地走完指定的工作行程范围(行程或转
角)。最大可能的行程必须始终大于设置的工作行程,否则初始化将被禁
止(出错显示代码52),因为不能达到工作行程。
是自动操作模式下最后时刻的给定值。此时阀位以%显示。
• 调整手动给定值
转动旋钮按钮至显示屏出现代码1。按一下旋钮按钮确定设
置,代码1 闪烁。当代码1 闪烁时,可通过转动旋钮按键将控制阀移
动至需要位置。继续转动直到阀门定位器输出压力变化和控制阀门开
始反应。若两分钟内未激活旋钮按键,则定位器将自动返回至手动模
器的过
渡时间决定,可能耗时几分钟。
MAX 是基于最大额定行程的初始化的默认设置。如果代码3
已确认允许组态,可通过代码6 改变到其它初始化模式。如定位器已
初始化了一次,在给定输入控制信号后,定位器会自动切换到上一次
的操作模式,相应显示为代码0。
• 初始化模式
通过代码3 启用允许组态和进入代码6之后,可以选择初始
保两个O形密封圈能够放置正确。
6、从定位器的反馈杆M(1)上把标准配置的连接销钉(2)拆除,将安装套
件中的φ5 金属连接销钉拧紧到90°销钉位置孔中。
samson 3725 定位器

Series 3725Electropneumatic Positioner Type 3725ApplicationSingle-acting positioner for attachment to pneumatic globe and rotary valves.Self-calibrating,automatic adaptation to valve and actuator.Reference variable 4 to 20 mA Travels 3.75 to 50 mm Opening angles 24 to 100°The positioner ensures a predetermined assignment of the valve stem position (controlled variable x)to the electric input signal (reference variable w).It compares the control signal received from a controller to the travel or opening angle of the control valve and issues a corresponding output signal pressure (output variable y).Special features•Simple direct attachment to SAMSON Type 3277Actuator (120 to 700 cm², Fig. 1)•Attachment according to NAMUR (IEC 60534-6-1)•Attachment to rotary actuators according to VDI/VDE 3845(Fig. 3)•Attachment to SAMSON Type 3372Actuator from the V2001 valve series (Fig. 2)•Easy operation with intuitive navigation menu using three ca-pacitive keys•LCD easy to read in any mounting position due to selectable reading direction•Variable, automatic start-up•Preset parameters –only values deviating from the standard need to be adjusted•All parameters saved in EEPROM (protection against power failure)•Two-wire system with a small electrical load of 300W •Tight-closing function can be activated •Continuous monitoring of zero point •Non-contact position sensing•Unaffected by environmental effects and steam hammeringVersion–Type 3725·Electropneumatic postioner with local opera-tion and LCDAssociated Information Sheet T 8350EN Edition December 2011Data SheetT 8394 ENFig.1Type 3725,direct attach-ment to Type 3277Pneumatic ActuatorFig.3Type 3725,attachment to rotary actuator according to VDI/VDE3845Fig.2Type 3725,attachment to Type 3372ActuatorPrinciple of operationThe electropneumatic positioner is mounted on pneumatic con-trol valves.It is used to assign the valve stem position(controlled variable x)to the input signal(reference variable w).The input signal received from a control system is compared to the travel or opening angle of the control valve and an output signal pres-sure (output variable y) is produced.The positioner consists of an anisotropic magnetoresistive (AMR)sensor(2),an analog i/p converter(6)with a down-stream booster(7)and the electronics unit with microcontroller (4).The travel or opening angle is measured by the pick-up lever connected to a magnet and an AMR sensor installed in the hous-ing.The motion of the pick-up lever causes the direction of the magnetic field to change.This change is sensed by the AMR sensor.The microprocessor determines the momentary valve position from this information.When a deviation occurs,the actuator is pressurized or vented. If required,the changes in the signal pressure can be slowed down by a volume restriction.The i/p module(6)is supplied with a constant upstream pressu-re by the pressure regulator(8)to make it independent of the supply air pressure.OperationA user-friendly,intuitive concept using three capacitive keys and a LCD has been developed:Users select parameters by touching the arrow keys and confirm the settings with the confir-mation key.In the menu,all parameters are listed in one level, meaning there is no need to search through submenus.All pa-rameter settings can be read and changed on site.All values are displayed on the LCD.The reading direction of the LCD can be rotated by 180°.2T8394ENTable 1·Technical data3T8394ENPositioner attachmentThe Type 3725Electropneumatic Positioner can be attached di-rectly to the Type 3277 Actuator over a connection block.When attached to the Type 3277-5Actuator (120cm²),the sig-nal pressure is routed over an internal bore in the actuator yoke to the actuator.In actuators with fail-safe action “Actuator stem retracts”and in actuators with effective diaphragm areas of 240cm²or larger,the signal pressure is routed to the actuator over ready-made external piping.Ordering textType 3725 Positioner–Without pneumatic connecting rail (only for direct attachment to Type 3277 Actuator)–Direct attachment to Type 3277 Actuator (120 to 700 cm²)–Attachment according to IEC 60534-6-1 (NAMUR)–Attachment to rotary actuators acc. to VDI/VDE 3845–Attachment to Type 3278 Rotary Actuator (160/320 cm²)–With pneumatic connecting rail G ¼–With pneumatic connecting rail ¼ NPT–Without/with pressure gauge up to max. 6 barT 8394ENSAMSON AG ·MESS- UND REGELTECHNIKWeismüllerstraße 3·60314 Frankfurt am Main · Germany Phone: +49 69 4009-0·Fax: +49 69 4009-1507Internet:http://www.samson.de2012-02Summary of explosion protection certificates (issued)Article codeII 2G Ex ia IIC T4according to ATEX11。
Samson 3730-3定位器中文操作说明
Samson 3730-3定位器中文操作说明Samson 3730-3 定位器操作说明一、安全信息1、请勿靠近高压、热源、有毒物质或易燃物质。
2、确保保持清洁,产品表面无污染,并在安装过程中避免静电放电现象。
3、请确保蓄电池安装的牢固,避免振动之类的物理伤害。
4、请确保电源处于安全和可靠的使用状态,确保电气安全。
二、基本性能Samson 3730-3定位器是一款高精度定位器,具有高稳定性和可靠性,可用于多种应用场景,最大特点是可根据传感器和用户设置的模型实时检测对象位置,有效保护对象压力变化。
1、重复定位精度:超过1mm;2、测量范围:200mm;3、传感器类型:可编程和固定;4、传感器电流:最大100mA;5、启用保护:供电欠压保护(<3V);6、可靠性性能:可用于恶劣环境;7、配置文件:通过以太网或GPRS通信。
三、操作过程(1)把电源打开;(2)安装定位器头部和控制单元;(3)安装传感器和安装模块;(4)连接电源和连接到控制单元;(5)运行传感器定位程序:将安装模块安装在定位头部上,并在控制单元上运行传感器定位程序;2、设置参数:(1)在定位头部上设置传感器,根据传感器型号设置参数:(2)设置定位器的参数:根据定位器的设置,设置相应的参数;3、连接网络:(2)通过以太网或GPRS通信连接到定位器上,用户可以通过设置合适的参数校准定位器;(3)设置定位器的IP地址,可通过配置文件实现远程控制定位器。
四、常见故障处理1、定位器失灵:(2)检查传感器是否连接正确;(3)确认定位器及控制单元是否有损坏;(5)重启定位器即可恢复。
2、信号弱:(3)检查路径结构或检查环境可能会降低信号强度;(4)更换增强信号的设备或信号放大器;。
SAMSON阀门定位器
SAMSON的阀门定位器也跟随着控制技术的发展,经历了由气动、电动、数字、发展到现在的区域总线阀门定位器。
在世界同类产品中,SAMSON 的阀门定位器以它的结构紧凑、耗气量低、工作可靠、定位器中可选附加功能多等优势得到了大家广泛的好评。
为了便于大家讨论,我们首先复习一下定位器中的基本自控元件。
定位器中基本自控元件介绍——电/气转换器原理随着仪表技术的发展,气动仪表领域已逐步被电动仪表和计算机控制所占领,现在只有在一些特殊的场合还在使用气动仪表,作为仪表中的阀门附件“定位器”也由原来的气动阀门(P/P)定位器逐步由电/气(E/P)阀门定位器所代替。
那么在电/气阀门定位器中输入的电信号是如何转换成气信号的呢?我们以SAMSON 6111 型电/气转换器为例介绍一下它的工作原理(见图1):图1 Function Diagram of 6111图1A Type 4763气动功率放大器(8)在设计时;选用合适的弹簧力(8.2),使当输入信号为0 mA 时保持输出PA 在100mbar ,这样输出的压力通过恒节流孔(8.4)使喷嘴(7)内有一定的背压。
当输入的信号增加时;通电的线圈(2)切割永久磁铁(3)的磁力线,产生向上的力→挡板(6)靠近喷嘴(7)使背压(PK)增加→膜片(8.3)↓→打开阀芯(8.5)→输出PA↑。
当输入信号减少时;挡板(6)离开喷嘴(7)→背压(PK)减少→输出压力(PA)作用下膜片(8.3)↑→阀芯(8.5)关死→输出压力通过阀芯(8.5)释放。
当PA 同PK 平衡时输出压力保持不变;这时电信号在线圈(2)中产生的力也同背压(PK)取得平衡。
这样输入的电信号就转换成气信号了。
定位器的组成以SAMSON 的4763 电/气阀门定位器(图1A)为例,定位器主要组成部分见图2。
图2 1.反馈杆(1)2.反馈弹簧(6)3.反馈风箱(7)4. 气动功率放大器(7下部)5. 电/气转换器(21)定位器工作原理1. 模拟定位器我们还是以SAMSON的4763定位器为例(参考图3)。
3730定位器使用说明
3730-2/-3 萨姆森定位器使用说明1.安装1)将其按在3277型萨姆森执行器。
行程由7,5 15 15/30 mm 几种。
安装前,抬起定位器杠杆,使跟随螺钉固定在执行器杆上。
2)确定控制阀从全关至全开位置的最大行程3)选择与最大行程范围线匹配的梢钉位置,紧固在定位器上。
4)梢钉位置选择,见盖盘上的目录。
5)当阀门行程在50% 时,旋紧指示名牌至阀杆上,使其指示在中间位置。
6)确定杠杆可以移动7)气路连接:把各管线旋紧至阀门所带配件上。
2.启动1) 连接仪表空气1.4—6bar,连接电变量4—20 MA2)设置失效安全模式,气开或气关3)仅对面积小于240cm2的执行器设置min side (侧联),min back(背联) 4)改变显示读数Turn O----Code2 J turn O-----display ok J5) 操作选择参数和数值,每一个参数有一个代码显示,利用O旋转推压钮进行选择,旋转按钮选择参数或数值按确认键确认。
按ESC阻止数值输入。
带有*的数值仅在他们预先使用代码3激活状态下更改。
组态方式在显示屏上以------〉显示。
详见盖内描述。
3. 初始化注意,经行初始化要预先进行设置(code36)Turn O-→code 3Jturn O→on J J: 代表确认Turn O→code36J select RUN J3.1最简方式安装和启动定位器按压INIT key ,定位器自动适应阀门最大行程。
3.2精确方式安装启动定位器后,按如下操作TurnO→code3JturnO-→ON JTurnO→code4J select pin positionJTurnO→code5J enter rated traval/angleJTurnO→ code6J select NOMJPRESS INIT key3.3手动方式类似于NOM方式,但最后值手动输入,操作如下TurnO→code0J turn O→select MANJTURNO→code1JTURNO→.V ALVE OPEN POSITION JTURN O→code3J TURNO→ON JTURN O→code6 J select MAN JPRESS INIT KEY注意:在加入电信号以后,定位器处在上一次使用的操作方式,代码0显示在屏幕,初始化未完成手动符号显示出现。
SAMSON 阀门定位器
SAMSON 阀门定位器A:概述:(电/气阀门定位器: 数字定位器有:Type 3730-2,3730-3(HART)智能型直接结合在3277型执行器)1 阀门定位器阀门定位器是控制阀的重要附属装置,实质上是一个定值控制的闭合回路,它与气动执行器配套使用,可以改善控制阀的静态特性和动态特性、克服阀杆的摩擦力和消除不平衡力的影响,实现控制阀根据控制信号的准确定位,最终保证控制系统及工业过程有效运行。
按照阀门定位器设计结构和工作原理可分类为:1.气动阀门定位器2.电气阀门定位器3. 数字式电气阀门定位器(也称为智能电气阀门定位器smart positioner)数字式电气阀门定位器是采用微处理技术和功能模块的新一代高性能电气阀门定位器,具有自校准自适应自诊断功能和免维护运行,也分带通信类型(HART、Profibus-PA、FF)和不带通信类型。
阀门定位器的生产厂商很多,系列/型号繁杂,但能提供高性能数字式电气阀门定位器的还不多,目前主要有:samson的378x型373x系列、Fisher的DVC2000/DVC5000/DVC6000系列2 SAMSON阀门定位器德国SAMSON公司是1907年成立的全球知名控制阀及控制设备专业制造商,设计生产有品种齐全的控制阀及控制仪表,同时生产高性能的全系列阀门定位器。
1952年生产出欧洲第一台气动阀门定位器,1989年推出数字式电气阀门定位器,目前更是全球数字式电气阀门定位器的领军厂商。
Samson设计生产的全系列阀门定位器有:(1)数字式电气阀门定位器·4~20mA 不带通信3730-1型,微处理器、LCD显示和单键式操作,符合IEC 65108/SIL 4;3730-2型,微处理器、LCD显示和单键式操作、本机自诊断,符合IEC 65108/SIL 4。
·4~20mA带HART通信3730-3型,微处理器、LCD显示和单键式操作、本机自诊断,符合IEC 65108/SIL 4;其中最新的373x系列数字式电气阀门定位器集成了先进的微处理技术、信息技术、诊断软件和功能模块,独特的数字/模拟电路控制定位和气动放大器清扫功能,单键旋钮组态操作,LCD显示(含本机诊断),多种总线连接通信和SAMSON SSP串行接口,还可通过控制系统、PC机(DD、DTM工具、AMS、PDM、PRM系统和SAMSONTROVIS-VIEW)或手持式终端设备进行组态和诊断。
samson 3760 型 气动阀门定位器 电气阀门定位器 说明书
EB 8385 ZH13760型气动阀门定位器 电气阀门定位器图1·3760型定位器安装与操作说明EB 8385 ZH2008年6月版目录目录页码1 设计和工作原理 (6)2 装配到气动执行器 (8)2.1 调整操作方向 (8)2.2 根据IEC 60534-6标准进行装配 (10)3 连接 (13)3.1 气动连接 (13)3.1.1 信号压力指示 (13)3.1.2 供气压力 (13)3.1.3 防护级别IP65 (13)3.2 电气连接 (14)3.2.1 开关放大器 (14)4 操作....................................................................... (15)4.1 起始值和给定值................................................................. (15)4.2 对“气动执行器杆伸出”的调整 (16)4.3 对“气动执行器杆缩回”的调整 (17)5 调整阀位开关...................................................................... . (18)5.1 阀位开关的改装................................................. . (18)6 定位器形式转换................................................................... . (20)6.1 气动式p/p转型成电气式i/p (21)6.2 电气式i/p转型成气动式p/p (22)7 尺寸mm ................................................................. (23)测试证书EB 8385 ZH2安全指导EB 8385 ZH 3EB 8385 ZH4定位器 型号 3760- X X X X X X防爆保护不带根据ATEX 指令的Ex II 2G EEx iA IIC T6 CSA/FM根据ATEX 指令的Ex II 3 G EEx nA II T6 附件不带感应接近开关气动连接 G1/81/8NPT电气连接 不带M20 x 1.5 蓝色M20 x 1.5 黑色 插塞接头符合 DIN 43650 输入控制信号 0.2 至 1 bar / 3 至 15 psi 4 至 20 mA 带 i/p 模块 6109 0 至 20 mA 带 i/p 模块 6112 1 至 5 mA 带 i/p 模块 6112选型0 1 3 80 1 2 3011201230122EB 8385 ZH5行程范围 0至5, 0至7。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Series 3725Electropneumatic Positioner Type 3725ApplicationSingle-acting positioner for attachment to pneumatic globe and rotary valves.Self-calibrating,automatic adaptation to valve and actuator.Reference variable 4 to 20 mA Travels 3.75 to 50 mm Opening angles 24 to 100°The positioner ensures a predetermined assignment of the valve stem position (controlled variable x)to the electric input signal (reference variable w).It compares the control signal received from a controller to the travel or opening angle of the control valve and issues a corresponding output signal pressure (output variable y).Special features•Simple direct attachment to SAMSON Type 3277Actuator (120 to 700 cm², Fig. 1)•Attachment according to NAMUR (IEC 60534-6-1)•Attachment to rotary actuators according to VDI/VDE 3845(Fig. 3)•Attachment to SAMSON Type 3372Actuator from the V2001 valve series (Fig. 2)•Easy operation with intuitive navigation menu using three ca-pacitive keys•LCD easy to read in any mounting position due to selectable reading direction•Variable, automatic start-up•Preset parameters –only values deviating from the standard need to be adjusted•All parameters saved in EEPROM (protection against power failure)•Two-wire system with a small electrical load of 300W •Tight-closing function can be activated •Continuous monitoring of zero point •Non-contact position sensing•Unaffected by environmental effects and steam hammeringVersion–Type 3725·Electropneumatic postioner with local opera-tion and LCDAssociated Information Sheet T 8350EN Edition December 2011Data SheetT 8394 ENFig.1Type 3725,direct attach-ment to Type 3277Pneumatic ActuatorFig.3Type 3725,attachment to rotary actuator according to VDI/VDE3845Fig.2Type 3725,attachment to Type 3372ActuatorPrinciple of operationThe electropneumatic positioner is mounted on pneumatic con-trol valves.It is used to assign the valve stem position(controlled variable x)to the input signal(reference variable w).The input signal received from a control system is compared to the travel or opening angle of the control valve and an output signal pres-sure (output variable y) is produced.The positioner consists of an anisotropic magnetoresistive (AMR)sensor(2),an analog i/p converter(6)with a down-stream booster(7)and the electronics unit with microcontroller (4).The travel or opening angle is measured by the pick-up lever connected to a magnet and an AMR sensor installed in the hous-ing.The motion of the pick-up lever causes the direction of the magnetic field to change.This change is sensed by the AMR sensor.The microprocessor determines the momentary valve position from this information.When a deviation occurs,the actuator is pressurized or vented. If required,the changes in the signal pressure can be slowed down by a volume restriction.The i/p module(6)is supplied with a constant upstream pressu-re by the pressure regulator(8)to make it independent of the supply air pressure.OperationA user-friendly,intuitive concept using three capacitive keys and a LCD has been developed:Users select parameters by touching the arrow keys and confirm the settings with the confir-mation key.In the menu,all parameters are listed in one level, meaning there is no need to search through submenus.All pa-rameter settings can be read and changed on site.All values are displayed on the LCD.The reading direction of the LCD can be rotated by 180°.2T8394ENTable 1·Technical data3T8394ENPositioner attachmentThe Type 3725Electropneumatic Positioner can be attached di-rectly to the Type 3277 Actuator over a connection block.When attached to the Type 3277-5Actuator (120cm²),the sig-nal pressure is routed over an internal bore in the actuator yoke to the actuator.In actuators with fail-safe action “Actuator stem retracts”and in actuators with effective diaphragm areas of 240cm²or larger,the signal pressure is routed to the actuator over ready-made external piping.Ordering textType 3725 Positioner–Without pneumatic connecting rail (only for direct attachment to Type 3277 Actuator)–Direct attachment to Type 3277 Actuator (120 to 700 cm²)–Attachment according to IEC 60534-6-1 (NAMUR)–Attachment to rotary actuators acc. to VDI/VDE 3845–Attachment to Type 3278 Rotary Actuator (160/320 cm²)–With pneumatic connecting rail G ¼–With pneumatic connecting rail ¼ NPT–Without/with pressure gauge up to max. 6 barT 8394ENSAMSON AG ·MESS- UND REGELTECHNIKWeismüllerstraße 3·60314 Frankfurt am Main · Germany Phone: +49 69 4009-0·Fax: +49 69 4009-1507Internet:http://www.samson.de2012-02Summary of explosion protection certificates (issued)Article codeII 2G Ex ia IIC T4according to ATEX11。