电机—matlab实验_哈工大2
哈工大 机电产品现代设计方法实验报告

1 实验目的(1)掌握典型机电产品多学科协同优化设计软件环境组成,包括建模软件、分析软件、协同平台;(2)自主设计产品模型、分析过程、优化目标;(3) 对得到的优化结果进行定性分析,解释结果的合理性,编写上机实验报告。
2 实验内容(1) 轴或负载台的有限元分析(2) 基于Adams的运动学分析与仿真3实验相关情况介绍(包含使用软件或实验设备等情况)网络协同设计环境,如图1所示:包括产品CAD建模、有限元分析FEM、动力学仿真ADAMS和控制仿真MATLAB。
计算机网络硬件环境和相应软件环境。
图形工作站和路由器,安装协同设计仿真软件。
型图1 协同设计仿真平台组成典型机电产品协同设计仿真工作流程如下图2所示。
1)利用CAD建模工具,建立产品模型;2)利用ADAMS建立产品运动学模型;3)根据CAD和ADAMS传过来的结构模型和边界条件分析零件应力场和应变场;4)用ADAMS分析得到的运动参数(位移、速度)。
图2 协同设计仿真平台组成SysML语言是UML语言(Unified Modeling Language,统一建模语言,一种面向对象的标准建模语言,用于软件系统的可视化建模)在系统工程应用领域的延续和扩展,是近年提出的用于系统体系结构设计的多用途建模语言,用于对由软硬件、数据和人综合而成的复杂系统的集成体系结构进行可视化的说明、分析、设计及校验。
在这里我们绘制参数图如下。
在下面的参数图中,我们确定了系统中各部件的相互约束情况。
图4产品初步结构与SysML图4实验结果(含操作过程说明、结果记录及分析和实验总结等,可附页)(一)底座转台关键件有限元分析:1,在CAD中打开零件的三维模型图,导出为IGES格式模型文件(*.igs),在Ansys中运行file->import->IGSE...导入该模型; 或者按照以下步骤创建零件模型。
运行Preprocessor->Modeling->V olumns->Cylinder->Solide Cylinder,弹出如下对话框,在对话框中输入相应数值,。
异步电机矢量控制Matlab仿真实验_(电机模型部分)
摘要异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,由磁链方程、电压方程、转矩方程和运动方程组成,为非线性,所以控制起来极为不便。
异步电机的模型之所以复杂,关键在于各个磁通间的耦合。
如果把异步电动机模型解耦成有磁链和转速分别控制的简单模型,就可以模拟直流电动机的控制模型来控制交流电动机。
本文研究了按转子磁链定向的矢量控制系统的电流闭环控制的设计方法,通过坐标变换,在按转子磁链定向同步旋转正交坐标系中,得到等效的直流电动机模型,然后仿照直流电动机的控制方法控制电磁转矩与磁链,将转子磁链定向坐标系中的控制量反变换得到三相坐标系的对应量,以实施控制,并用MATLAB进行仿真。
关键词:异步电动机直流电动机磁链 MATLAB仿真目录1 课程任务设计书 (2)2 异步电动机数学模型基本原理 (3)2.1 异步电动机的三相动态数学模型 (3)2.2 异步电机的坐标变换 (6)2.2.1 三相-两相变换(3/2变换) (6)2.2.2静止两相-旋转正交变换(2s/2r变换) (8)3 异步电动机按转子磁链定向的矢量控制系统 (9)3.1 按转子磁链定向矢量控制的基本思想 (9)3.2 以ω-is-ψr 为状态变量的状态方程 (9)3.2.1 dq坐标系中的状态方程 (9)3.2.2αβ坐标系中的状态方程 (10)3.3αβ坐标系下异步电机的仿真模型 (11)3.4矢量控制系统设计 (14)3.5 矢量控制系统的电流闭环控制方式思想 (14)4 异步电动机矢量控制系统仿真 (15)4.1 仿真模型的参数计算 (15)4.2 矢量控制系统的仿真模型 (16)4.3仿真结果分析 (17)5. 总结与体会 (18)参考文献 (19)1课程任务设计书2 异步电动机数学模型基本原理异步电动机是个高阶、非线性、强耦合的多变量系统。
在研究异步电动机数学模型时,作如下的假设:120电角度,产生的磁动(1)忽略空间谐波,设三相绕组对称,在空间中互差势沿气隙周围按正弦规律分布;(2)忽略磁路饱和,各绕组的自感和互感都是恒定的;(3)忽略铁心饱和;(4)不考虑频率变化和温度变化对绕组电阻的影响。
哈工大_数学实验报告

数学实验报告实验一Matlab的使用1.上机实验各种数据输入方法:程序语句:a=[1 2 3;4 5 6 ;7,8,9] 程序语句:linspace(1,10,5) 等等…………计算结果:a = 计算结果:ans =1 2 34 5 6 1.0000 3.2500 5.5000 7.7500 10.00007 8 92.(1) (a)方法:(b) 方法:程序语句:程序语句:a=[-3 5 0 8;1 -8 2 -1;0 -5 9 3;-7 0 -4 5]; a=[-3 5 0 8;1 -8 2 -1;0 -5 9 3;-7 0 -4 5];b=[0;2;-1;6]; b=[0;2;-1;6];inv(a)*b a\b计算结果:计算结果:ans = ans =-0.6386 -0.6386-0.4210 -0.4210-0.3529 -0.35290.0237 0.0237(2) 4个矩阵的生成语句:矩阵a 的生成语句:e=eye(3,3); a=[e r;o s]r=rand(3,2); 验证语句:o=zeros(2,3); a^2s=diag([1,2]);%此为一个任取的2X2 矩阵b=[e r+r*s; o s^2]计算结果相同:ans =1.0000 0 0 1.9003 1.45790 1.0000 0 0.4623 2.67390 0 1.0000 1.2137 2.28630 0 0 1.0000 00 0 0 0 4.00003.生成多项式的语句:poly ([2,-3,1+2i,1-2i,0,-6])计算结果:ans = 1 5 -9 -1 72 -180 0 计算x=0.8,-x=-1.2 之值的指令与结果:指令:polyval([1,5,-9,-1,72,-180,0],0.8) 结果:ans= -100.2179指令:polyval([1,5,-9,-1,72,-180,0],-1.2) 结果:ans= 293.29004.求a的指令与结果:指令:a=compan([1,0,-6,3,-8])结果:a =0 6 -3 81 0 0 00 1 0 00 0 1 0求a的特征值的指令与结果:roots(p)的指令与结果为:指令:eig(a) 指令:roots([1,0,-6,3,-8])结果:结果:ans = ans =-2.8374 -2.83742.4692 2.46920.1841 + 1.0526i 0.1841 + 1.0526i0.1841 - 1.0526i 0.1841 - 1.0526i结论:利用友元阵函数a=company(p) 和eig(a) 可以与roots(p)有相同的作用,结果相同。
哈工大 电机学 MATLAB 仿真 实验报告
基于MATLAB的电机学计算机辅助分析与仿真实验报告班级:学号:姓名:完成时间:一、实验内容1.1单相变压器不同负载性质的相量图通过MATLAB 画出单相变压器带感性,阻性,容性三种不同性质负载的变压器向量图1.2感应电机的S T -曲线通过MATLAB 画出三相感应电动机的转矩转差率曲线二、实验要求2.1单相变压器不同负载性质的相量图根据给定的仿真实例画出负载相位角30,0,302-=j 三种情况下得向量图,观察电压大小与相位的关系,了解总结负载性质不同对向量图的影响2.2感应电机的S T -曲线根据给定的实例,画出3.1~3.1-=s 的S T -曲线,了解感应电机临界转差率的大小和稳定工作区间的大小,给出定性分析三、实验方法3.1单相变压器不同负载性质的相量图1.单相变压器不同负载性质的相量图 (1)先画出负载电压'2U 的相量;(2)根据负载的性质和阻抗角画出二次电流(规算值)的相量(3)在2U 上加上一个与电流方向相同的压降,其大小为二次电流规算值'2I 与二次漏电阻规算值'2R 之积;再加上一个超前电流方向︒90的压降,其大小为二次电流'2I 规算值与二次漏电抗规算值'2χ之积; (4)根据上一步结果连线,得出'2E ; (5)超前'2E 方向︒90画出m Φ;(6)根据励磁电阻与电抗的大小得出励磁阻抗角,并超前m Φ一个励磁阻抗角的大小得出m I 的方向;(7)根据平行四边形法则,做出'2I -与m I 的和,即为1I ; (8)根据'21E E =得出1E ,并得出1E -。
(9)在1E -上加上一个与电流方向相同的压降,其大小为一次电流1I 与一次漏电阻1R 之积;再加上一个超前电流方向︒90的压降,其大小为一次电流1I 与一次漏电抗1χ之积;(10) 根据上一步结果连线,得出1U ;3.2感应电机的S T -曲线实验采用matlab 对转矩转差率曲线进行仿真。
哈工大自控实验—基于MATLABSimulink的控制系统分析
Harbin Institute of Technologyb/;;/自动控制理论实验报告院系:电气工程及自动化学院班级:姓名:学号:实验名称:基于MATLAB/Simulink的控制系统分析同组人:实验时间:2015年11月11日哈尔滨工业大学实验五 线性系统的时域分析一、实验目的1、学会使用MATLAB 绘制控制系统的单位阶跃响应曲线;2、研究二阶控制系统中 、 对系统阶跃响应的影响3、掌握系统动态性能指标的获得方法及参数对系统动态性能的影响。
二、 实验设备Pc 机一台,MATLAB 软件。
三、实验内容1、已知二阶单位反馈闭环传递函数系统:求:(1)当 及 时系统单位阶跃响应的曲线。
① 时系统单位阶跃响应的曲线。
Time (seconds)A m p l i t u d e② 时系统单位阶跃响应的曲线。
Time (sec)A m p l i t u d eTime (sec)01020304050607080(2)从图中求出系统的动态指标: 超调量M p、上升时间t p及过渡过程调节时间t s。
,超调量=30.9%,上升时间=3,48s,=27.5s;,超调量=16.3%,=4.1s,=20.2s。
,=30.9%,=6.95s,=54.9s;,=30.9%,=2.33s,=18.3s。
(3)分析二阶系统中、的值变化对系统阶跃响应曲线的影响。
当不变,变大,系统的上升时间减小,最大超调量变小,调整时间减小。
当,变大,系统的上升时间减小,最大超调量不变,调整时间减小。
2、已知三阶系统单位反馈闭环传递函数为(1)求取系统闭环极点及其单位阶跃响应,读取动态性能指标。
(2)将原极点 S=-4 改成 S=-0.5,使闭环极点靠近虚轴,观察单位阶跃响应和动态性能指标的变化。
Time (sec)=7.26%,=1.03s,=3.64s;将原极点 S=-4 改成 S=-0.5(绿线)后, ,=4.12s,过渡过程调节时间=7.84s(3)改变系统闭环零点的位置将原零点 S=-2 改成 S=-1, 观察单位阶跃响应和动态性能指标的变化。
MATLAB电机控制综合仿真实验
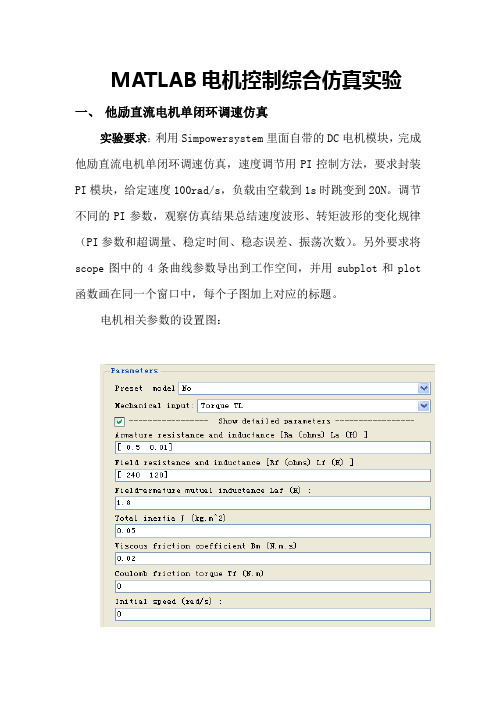
MATLAB电机控制综合仿真实验一、他励直流电机单闭环调速仿真实验要求:利用Simpowersystem里面自带的DC电机模块,完成他励直流电机单闭环调速仿真,速度调节用PI控制方法,要求封装PI模块,给定速度100rad/s,负载由空载到1s时跳变到20N。
调节不同的PI参数,观察仿真结果总结速度波形、转矩波形的变化规律(PI参数和超调量、稳定时间、稳态误差、振荡次数)。
另外要求将scope图中的4条曲线参数导出到工作空间,并用subplot和plot 函数画在同一个窗口中,每个子图加上对应的标题。
电机相关参数的设置图:仿真原理图:在仿真试验中需要按照实验要求对PI控制器子系统进行封装,然后更改Kp、Ki参数值的大小。
封装PI模块图如下:Plot绘图程序:>>subplot(411)>> plot(t,W,'r'),title('转速')>> subplot(412)>> plot(t,Ia,'b'),title('电枢电流')>> subplot(413)>> plot(t,Te,'g'),title('转矩')>> subplot(414)>> plot(t,If,'y'),title('励磁电流')速度调节用PI控制方法,给定速度100rad/s,负载由空载到1s 时跳变到20N,调节不同的PI参数,从PI模块封装中调节,修改不同的参数Ki 、Kp观察仿真结果。
Ki=100, Kp=5;050100w (r a d /s )00.51 1.52 2.53 3.54 4.55-2000200I a (A )-202I f (A )-1000100T e (N .m )Ki=2, Kp=1;w (r a d /s)I a (A)00.51 1.52 2.53 3.54 4.55I f (A)00.51 1.52 2.53 3.54 4.55T e (N .m )二、 他励直流电机闭环调速系统仿真实验要求:利用Simulink 基本模块搭建他励直流电机闭环调速系统直流电机子模块,根据以下电机数学模型搭建:电磁转矩公式:e M a T C I =Φ 动力学平衡方程:e L m d T T B J dtωω--=电机模块要求封装,参数20.05kg m J =⋅,0.02N m s m B =⋅⋅,165m C =,0.01Wb f Φ=,恒定负载T L =20N 点击封装模块时输入。
哈工大电机学仿真实验
电机学难重点的MA TLAB仿真实验报告班级:1111111学号:1111111111姓名:哈哈完成时间:2015.11.28实验一一、实验内容及目的1.实验内容型号为50Hz热轧硅钢片DR610-50(D21)的铁磁材料的基于Matlab的磁化曲线拟合。
2.实验目的1)了解磁化曲线的非线性和饱和特性2)掌握采用Matlab进行曲线拟合的方法二、实验要求及要点描述1.实验要求50Hz热轧硅钢片DR610-50(D21)磁化曲线1)绘制相关磁化曲线2)根据所提供的数据,合理选取全部和部分数据绘制磁化曲线,并进行比较,不少于4条曲线3)绘制每条磁化曲线对应的图和表4)在一个图中显示全部曲线,并进行区分2.实验要点1)采用屏幕图形方式直观显示2)利用编程方法和Matlab的拟合函数3)采用多种函数如多项式,指数函数,对数函数等进行拟合,并进行比较,最后给出拟合精度最高的表达式三、基本知识及实验方法描述1.基本知识在非铁磁材料中,磁通密度B 和磁场强度H 之间是线性关系,其系数就是空气的磁导率0μ。
而在铁磁材料中,二者是非线性关系,称为磁化曲线。
当外磁场由零逐渐增大时,开始磁感应强度B 随着磁场强度H 增加缓慢,磁感应强度B 随着H 的增大而迅速增长,接近于线性,之后增长放慢,并趋近于饱和,达到饱和后,磁化曲线基本上成为与非铁磁材料的B=0μH 特性相平行的直线。
一般的,磁化曲线分为起始段,直线段,饱和段和过饱和段四部分,其中直线段和饱和段的交界点就是曲线的膝点。
由于表征磁化曲线是用磁通密度B 和磁场强度H 两维数组表示的,是不连续的,而且其变化特征也比较复杂。
当数据量很大时,采用这种数组形式很不方便,也占用存储量。
最好的处理方式,是采用曲线拟合方法,把磁化曲线表示成显函数形式的解析表达式。
2.实验方法描述常用的曲线拟合方法有两种(1)最佳平方逼近。
该方法是连续函数的最近平方逼近问题,是用已知的一组互不相关的基函数,通过最佳平方逼近的方法求得未知的连续函数f (x )。
电机学2
同步发电机的matlab仿真一、实验目的1、掌握matlab的部件simulink中电力系统模块集(power systemblockset)里的同步发电机模块及相关工具。
2、掌握使用simulink进行同步电机仿真的方法。
3、掌握采用matlab语言编程进行同步发电机功角特性仿真的方法。
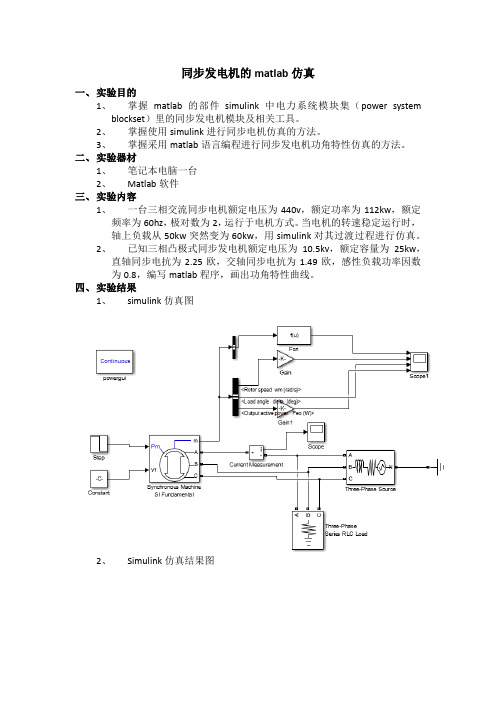
二、实验器材1、笔记本电脑一台2、Matlab软件三、实验内容1、一台三相交流同步电机额定电压为440v,额定功率为112kw,额定频率为60hz,极对数为2,运行于电机方式。
当电机的转速稳定运行时,轴上负载从50kw突然变为60kw,用simulink对其过渡过程进行仿真。
2、已知三相凸极式同步发电机额定电压为10.5kv,额定容量为25kw,直轴同步电抗为2.25欧,交轴同步电抗为1.49欧,感性负载功率因数为0.8,编写matlab程序,画出功角特性曲线。
四、实验结果1、simulink仿真图2、Simulink仿真结果图3、Matlab程序U=10500/(3^0.5);Xq=1.49;Xd=2.25;I=25000000/(10500*3^0.5);l=acos(0.8);y=atan((U*sin(l)+I*Xq)/U*0.8);zeta=y-l;E0=U*cos(o)+I*Xd;deta=0:0.001:3.14;Pe=3*E0*U*sin(deta)/Xd+3*U^2*(1/Xq-1/Xd)*sin(2*deta)/2; plot(deta,Pe);xlabel('deta');ylabel('pe');grid on4、Matalab程序结果五、实验结果分析1、由simulink仿真图可知当同步电机负载突变时(50kw——60kw),其负载电流先波动后趋于稳定,变大。
转速先波动后趋于稳定,不变。
功率角减小,电磁转矩减小,符合给定的技术数据。
2、由程序结果图知其功角特性曲线为一条变形的正弦曲线,且对发电机来说其deta的取值为[0,180]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MATLAB的电机学计算机辅助分析与仿真实验报告一、实验内容(0.25分)基于matlab 的他励直流电动机的调速特性曲线的绘制一台他励直流电动机,外加电压U=220V ,电枢电阻Ra=0.1Ω,系数Ct Φ=1.53Nm/A,额定力矩120Nm ,负载与空载转矩的变化规律如下,分析其三种调速特性。
n0 370 800 1050 1250 1400 1550 T2+T0 15 25 50 75 100 125 150二、实验要求(0.25分)1.采用屏幕图形方式直观显示2.利用matlab 编程实现3.每种调速方式至少要有三条曲线,并求出各曲线交点4.给出定性的分析结论三、实验方法描述(2.5分)配合linspace ,spline 函数使用插值法画出负载的机械特性曲线,然后再通过转速n 的公式em em T e a e kT n T C C R C U n -=Φ-Φ=02分别通过改变U 的值,Ra 的值以及ΦT C 的值来得到三个不同的图。
画图采用了画线性坐标系plot 语句,使用xlabel ,ylabel 语句来标示x 轴y 轴,使用text 语句来标示曲线名称,其中又采用\fontsize,\fontname 分别标示汉字大小和字体,并加入箭头标志,使用\Omega 标示Ω,\Phi 标示Φ,_{}来标示下标,得到完整清晰的标注,然后再通过Data Cursor 得到交点坐标,完成实验四、实验源程序(1分)1.直流电动机调压调速特性源程序x=[15,25,50,75,100,125,150];y=[0,370,800,1050,1250,1400,1550];xx=linspace(15,150,1000);yy=spline(x,y,xx);plot(xx,yy)xlabel('\fontsize{12}\fontname{宋体}转矩Te\rightarrow')ylabel('\fontsize{12}\fontname{宋体}转速n\rightarrow')hold on;tem=[0:0.001:150];u=220;ra=0.1;cto=1.53;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)u=200;ra=0.1;cto=1.53;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)hold on;u=180;ra=0.1;cto=1.53;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)hold on;u=160;ra=0.1;cto=1.53;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)text(50,1400,'\itU_{1}=220V');text(50,1250,'\itU_{2}=200V');text(50,1130,'\itU_{3}=180V');text(50,1000,'\itU_{4}=160V');title('\fontsize{14}\fontname{隶书}直流电动机的调压调速特性');2.直流电动机串电阻调速特性源程序x=[15,25,50,75,100,125,150];y=[0,370,800,1050,1250,1400,1550];xx=linspace(15,150,1000);yy=spline(x,y,xx);plot(xx,yy)xlabel('\fontsize{12}\fontname{宋体}转矩Te\rightarrow')ylabel('\fontsize{12}\fontname{宋体}转速n\rightarrow')hold on;tem=[0:0.001:150];u=220;ra=0.1;cto=1.53;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)hold on;tem=[0:0.001:150];ra=0.5;cto=1.53;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)hold on;tem=[0:0.001:150];u=220;ra=0.8;cto=1.53;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)hold on;tem=[0:0.001:150];u=220;ra=1.2;cto=1.53;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)hold on;title('\fontsize{14}\fontname{隶书}直流电动机的串电阻调速特性'); text(135,1350,'\itR_{a1}=0.1\Omega');text(135,1150,'\itR_{a2}=0.5\Omega');text(135,950,'\itR_{a3}=0.8\Omega');text(135,750,'\itR_{a4}=1.2\Omega');3.直流电动机变磁通调速特性源程序x=[15,25,50,75,100,125,150];y=[0,370,800,1050,1250,1400,1550];xx=linspace(15,150,1000);yy=spline(x,y,xx);plot(xx,yy)xlabel('\fontsize{12}\fontname{宋体}转矩Te\rightarrow')ylabel('\fontsize{12}\fontname{宋体}转速n\rightarrow')hold on;tem=[0:0.001:150];u=220;ra=0.1;cto=1.53;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)tem=[0:0.001:150];u=220;ra=0.1;cto=2;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)hold on;tem=[0:0.001:150];u=220;ra=0.1;cto=2.7;ceo=cto*2*pi/60;n=u/ceo-ra*tem/(ceo*cto);plot(tem,n)hold on;title('\fontsize{14}\fontname{隶书}直流电动机的变磁通调速特性'); text(25,1400,'\itC_{e}\Phi=1.53');text(25,1090,'\itC_{e}\Phi=2.00');text(25,830,'\itC_{e}\Phi=2.70');五、实验结果(2.5分)1.交点从下到上分别为Te1=66.61Nm,n1=971.4 r/minTe2=79.16Nm,n2=1091 r/minTe3=94.57Nm, n3=1210 r/minTe4=112.1Nm, n3=1327r/min2.交点从下到上依次为Te1=71.86Nm,n1=1021r/min Te2=81.55Nm, n2=1107r/min Te3=91.25Nm,n3=1187r/min Te4=112.6Nm,n4=1327r/min3.交点从下到上分别为Te1=47.55Nm,n1=771.9r/minTe2= 73.26 Nm,n2=1033r/minTe3=112.6Nm,n3=1327r/min分析结论:根据公式em em T e a e kT n T C C R C U n -=Φ-Φ=021.调压调速时,特征曲线是斜率相同,截距不同的一组平行线,基本趋势是电压越高,负载转速越快。
2. 串电阻调速时,特性曲线是斜率变化,截距相同的一组相交线,基本趋势是串的电阻越大,负载转速越低。
3.变磁通时,特性曲线是斜率和截距都变化的一组相交线,规律比较复杂,基本趋势是磁通变小时负载转速升高。
六、心得体会(3.5分)该实验是对他励直流电动机的调速特性曲线的绘制。
题目相对还说比较基本,但是对于初步使用matlab 的我来说,做起来还是比较麻烦。
便是过程中,有好多错误出现,而且有好多错误,自己好多次也发现不了。
这是,多亏了大家一起合作,互相帮助,互相检查,那些错误都得以纠正。
整个实验的大部分都是组长带头做的,因为我对matlab 的生疏,基本上都是做辅助工作。
但是经过这次试验,我对matlab 有个更深刻地认识,也有了更熟练地运用。