单片机的步进电机细分控制
基于51单片机步进电机的控制及细分驱动电路-简易软件
基于51单片机步进电机的控制及细分驱动电路悬赏分:20|解决时间:2009-6-22 21:11 |提问者:sailorman123我的邮箱sailor3848352@拜求高手指点,希望能附带相应的电路图,和一定的说明。
谢谢给位大虾了!!!最佳答案参考:/chary8088/blog/item/177332ce39cef70a92457ea9.html接触单片机快两年了,不过只是非常业余的兴趣,实践却不多,到现在还算是个初学者吧。
这几天给自己的任务就是搞定步进电机的单片机控制。
以前曾看过有关步进电机原理和控制的资料,毕竟自己没有做过,对其具体原理还不是很清楚。
今天从淘宝网买了一个EPSON的UMX-1型步进电机,此步进电机为双极性四相,接线共有六根,外形如下图所示:拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为360/(4×5)=18度。
地线与四线接触的顺序相反,电机的转向也相反。
如果用单片机来控制此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。
通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四线脉冲电流的顺序,则可实现对转向的控制。
所以,设计了如下电路图:C51程序代码为:代码一#include <AT89X51.h>static unsigned int count;static unsigned int endcount;void delay();void main(void){count = 0;P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 0;EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1 ET0 = 1; //定时器0中断允许TH0 = 0xFC;TL0 = 0x18; //设定时每隔1ms中断一次TR0 = 1; //开始计数startrun:P1_3 = 0;P1_0 = 1;delay();P1_0 = 0;P1_1 = 1;delay();P1_1 = 0;P1_2 = 1;delay();P1_2 = 0;P1_3 = 1;delay();goto startrun;}//定时器0中断处理void timeint(void) interrupt 1{TH0=0xFC;TL0=0x18; //设定时每隔1ms中断一次count++;}void delay(){endcount=2;count=0;do{}while(count<endcount);}将上面的程序编译,用ISP下载线下载至单片机运行,步进电机便转动起来了,初步告捷!不过,上面的程序还只是实现了步进电机的初步控制,速度和方向的控制还不够灵活,另外,由于没有利用步进电机内线圈之间的“中间状态”,步进电机的步进角度为18度。
基于STC单片机的SPWM步进电机细分控制研究与实现
步 驱动 控制 时 有 以下 缺 点 :步 距 角较 大 ,转 速 不
够 平 稳 ,低 速 时 容 易 产 生 振 动 ,机 械 噪 声 较 大 ,
波控 制 信 号 ,绕 组 中 电流 的 闭环 控 制 ,从 而 实 现
1 S WM步进 电机细分驱 动原理 P
11 基于 D/A 换 的细分 驱动 . 转 目前细 分 驱 动都 是 采用 D /A 转 换 的方 式 进
行 细 分 。所 谓 细 分 驱 动就 是把 一 个 机 械 步 距 角 细 分 成 若 干 个 电 的步 距 角 ,当转 子 从 一 个 位 置 转 到
制 领域 用步 进 电机 来 控 制 变得 非 常 简单 ,由 此步 进 电机 已被 广泛 地应 用 ,应用范 围正 不断 扩大 。 但 是 由于 其 结 构 及 运 行 上 的 特 点 使 它存 在 整
驱 动 步 进 电机 , 电机 每 运 行 一 步 ,其 绕 组 内的 电 流 将 从 0突 变 为 3 或 从 3 突变 到 0 A A ,o g
( 湖南广播 电视大学 ,长沙 4 0 0 ) 1 0 4
摘
要 : 步进电动机控制方 法多种多样 ,其驱 动方式与运行性 能关系极大。本文突破 目前通用的D A / 转换细分 电路方 式,创新性提出了一种基于S WM的细分控制方法 ,该细分采用S O805 单 P T 9 1 片机 实现了对步进 电机 的控制。这种细分控 制采 用S WM脉 冲实现 ,使硬 件结构简单 ,调整 P 方便 ,控制精度高 ,运行平稳 ,可靠性和抗干扰能力强 ,应用效果良好。
本科毕业论文__基于单片机的步进电机的细分控制器的设计 精品

基于单片机的步进电机的细分控制器的设计摘要步进电机是一种将电脉冲信号转换成相应的角位移或线位移的机电元件,具有易于开环控制、无积累误差等优点,在众多领域获得了广泛的应用。
步进电机的运行品质既与电机的本体性能有关,也与驱动器和控制器的性能有关。
一般步进电机的运行噪声大,控制精度低,无法满足很多场合下较高运行品质的要求,因此实现步进电机的细分控制可以较大地改善步进电机的系统性能。
本课题在总结和归纳多种步进电机细分控制技术的基础上,设计完成了基于单片机的步进电机细分控制系统。
细分驱动技术是一种能有效改善步进电机低频特性和提高步进精度的驱动技术。
广泛应用于对工况要求较高的场合,尤其在一些要求高精度、低噪音、低振动的系统中,细分驱动成为步进电机驱动的首选驱动技术。
本文先介绍了三相步进电机的结构和工作原理,然后在对步进电机细分驱动技术和单片机研究的基础上,分析了细分驱动对于改善步进电机运行性能的作用,该方案中电流细分技术基本上克服了传统步进电机低速振动大和噪音大的缺点,减小发生共振的几率。
该方案能避免其它相绕组的感应电压和绕组电流的漂移带来的误差,提高了细分精度。
本文采用控制电路主要由AT89C51单片机、晶振电路、地址锁存器、译码器、EEPROM存储器及可编程键盘/显示控制器Intel-8279等组成,单片机是控制系统的核心。
采用IR2130功率驱动芯片作为步进电机的功率驱动器件。
文中对整个系统的架构及硬件电路和驱动软件的实现都做了详细的介绍。
关键词单片机;步进电机;细分控制- I -Design of Stepper Motor Subdivision ControllerBased on MicrocontrollerAbstractStepper motor is a kind of electromechanical component that is driven in step angle or line displacement by electric pulse signal. Because of having the advantage of easy open-loop control and no accumulating error,stepper motor is being applied widely in many fields . As an integrated system including with both stepping motor and driver,its quality of operation is depended on the performance of motor,driver and controller .Generally,the noise of the stepping motor is great,and control precision is low,which can't meet request of the high running quality in many situations . So the performance is improved in stepping motor operation through realizing the subdivision operation of stepping motor. This topic in summarizes various stepping motor subdivision control technology, on the basis of these technology, completed the design of stepping motor subdivision system based on single-chip microcomputerThe stepper motor‟s micro-stepping driver is a kind of driving technology that can effectively improve the step precision and characteristic of low frequency. It is mostly used when the equipments require high-precision,low noise or low vibration system, and it is being a more and more popular driving technology.In this paper,the working principle and configuration of three-phase Stepper are introduced,then based on technologies such as stepper motor controller and microcontroller .we analysis the using of micro-stepping driving technology to improve operational performance . Current subdividing technology not only overcomes the disadvantages of motor‟s vibration and noise at low speeds but also reduces probability of resonance. It prevents the reactive voltage errors brought by other windings and the drift errors brought by current. It improves the precision of subdivision. In the thesis,we develop a single chip computer-based digital controlling system for a three-phase stepper motor that is mainly constructed from a AT89CS1 single chip computer and 8279IC which is used as the core of control parts and a three full-bridge driver IR2130. The power stage of this driver uses IGBT IR2130 that provides high reliability. Based on the approach,the system's whole architecture,the design of hardware and software are in traduced in detail. Keywords Single chip microcomputer;Stepper motor;Subdivide control- II -目录摘要 (I)Abstract ........................................................................................................................ I I第1章绪论 (1)1.1 课题背景 (1)1.2 步进电机概述 (1)1.3 步进电机驱动系统概述 (2)1.4 国内外研究状况及发展趋势 (3)1.5 论文研究内容 (4)第2章步进电机及其驱动系统 (5)2.1 步进电机及其工作原理 (5)2.1.1 步进电机的结构特点 (5)2.1.2 步进电机的基本工作原理 (5)2.1.3 绕组通电方式 (6)2.1.4 步距角的控制 (7)2.2 步进电机驱动系统 (7)2.2.1 步进电机驱动系统简介 (7)2.2.2 步进电机细分驱动原理及特点 (8)2.3 本章小结 (9)第3章控制芯片及相关器件简介 (10)3.1 单片机的介绍 (10)3.1.1 芯片的选择 (10)3.1.2 AT89C51单片机与管脚功能简介 (11)3.2 8位数模转换器DAC0832简介 (14)3.3 8279显示与键盘控制芯片简介 (15)3.3.1 8279显示键盘控制芯片的功能 (15)3.3.2 8279显示键盘控制芯片引脚定义 (15)3.4 IR2130驱动电路简介 (16)3.4.1 IR2130结构及功能 (16)3.4.2 IR2130的逆变器电路结构 (18)3.5 本章小结 (19)第4章系统构架与硬件电路的设计 (20)4.1 系统硬件结构 (20)4.2 系统硬件电路设计 (21)4.2.1 单片机控制电路 (21)4.2.2 电机驱动电路 (21)- III -4.2.4 开关电源电路 (22)4.2.5 显示和键处理电路 (23)4.3 本章小结 (24)第5章系统软件设计 (25)5.1 系统软件总体结构 (25)5.2 系统开发软硬件环境 (25)5.3 步进电机控制主程序设计 (26)5.4 步进电机细分驱动程序设计 (27)5.5 步进电机显示和键处理程序设计 (28)5.6 本章小结 (30)结论 (31)致谢 (32)参考文献 (33)附录A (34)附录B (42)附录C (48)- IV -第1章绪论1.1课题背景随着电力电子技术、微电子技术,控制技术的快速发展和EDA技术的日益成熟,特别是高性能可编程逻辑器件的出现,使得步进电机驱动系统集成化设计成为可能,并伴随着电动机本体的发展和变化,传统电机分类间的界面越来越模糊。
51单片机细分驱动步进电机
51单片机细分驱动步进步进电机一、引言步进电机是一种将电脉冲转化为角位移的执行机构。
步进电机与普通电机最大的不同就是步进电机能很好地控制电机的旋转角度。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机原理说明请参考/Article.asp?id=1699533。
大家看到配单片机学习开发板的大多是小巧的那种两相步进电机(六线、也称四相),而实际上应用最广泛的就是工业或专用设备的24V/2~4A的步进电机,这类电机则需要专门制作或购买带细分功能的步进驱动器来驱动,所以了解和学会使用这种驱动器是单片机应用的必修课。
不过无论电机大小,原理是一样的。
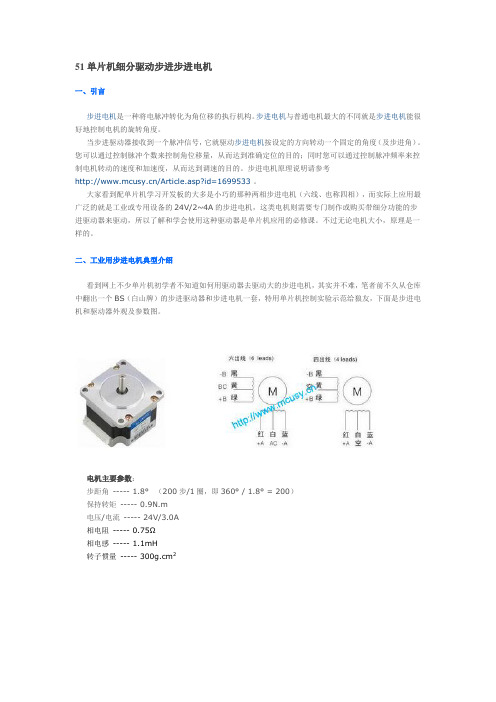
二、工业用步进电机典型介绍看到网上不少单片机初学者不知道如何用驱动器去驱动大的步进电机,其实并不难,笔者前不久从仓库中翻出一个BS(白山牌)的步进驱动器和步进电机一套,特用单片机控制实验示范给狼友,下面是步进电机和驱动器外观及参数图。
电机主要参数:步距角----- 1.8°(200步/1圈,即360° / 1.8° = 200)保持转矩----- 0.9N.m电压/电流----- 24V/3.0A相电阻----- 0.75Ω相电感----- 1.1mH转子惯量----- 300g.cm2步进驱动器主要参数:反应频率 ----- 200Kpps (最高)驱动电流 ----- 0.5~4A连续可调电压范围----- DC12~40V 特殊功能:双极恒流斩波方式;步进脉冲停止超过100ms 时,电机线圈自动减半。
设有12/8档等角度恒力矩细分,最高200细分。
细分数1248163264128 D0ON OFF ON OFF ON OFF ON OFF D1ON ON OFF OFF ON ON OFF OFF D2ON ON ON ON OFF OFF OFF OFF D3无效D4ON, 双脉冲:PU为正向步进脉冲信号,DR为反向步进脉冲信号OFF, 单脉冲:PU为步进脉冲信号,DR为方向控制信号D5自检测开关(OFF时接收外部脉冲,ON时驱动器内部发7.5KHz脉冲)二、用单片机驱动步进电机经过测试和电路了解,此驱动器内部各信号输入端具有光耦隔离电路,而且只需10MA左右即可驱动,因此单片机I/O直接接到驱动器即可。
单片机控制的步进电动机斩波恒流细分驱动器的实现

单片机控制的步进电动机斩波恒流细分驱动器的实现引言步进电动机是一种将离散的电脉冲信号转化为相应角位移或线位移的电磁机械装置,它输出的角位移与输入的脉冲数成正比,是一种输入与输出脉冲对应的增量驱动元件。
它具有转矩大、惯性小、响应频率高等优点,已经在工业上得到广泛的应用。
但其步矩角较大,一般为1.53,往往满意不了某些高精度定位、精密加工等方面的要求。
实现细分驱动是减小步矩角、提高步进辨别率、增加电动机运行平稳的一种行之有效的方法。
目前步进电动机细分驱动掌握,多采纳量化的梯形波、正弦波作为细分驱动的电流波形,但实际上这些电流波形一般在步进电动机上均不能得到满足的细分精度。
在合理选择电流波形的基础上,提出用at89c52单片机掌握实现的步进电动机斩波恒流细分驱动方案,其运行功率小,牢靠性高,通用性好,细分精度高,具有很强的有用性。
2 细分电流波形的选择及量化步进电动机的细分掌握,从本质上讲是通过对步进电机的励磁绕组中的电流掌握,使步进电动机内部的合成磁场为匀称的圆形旋转磁场,从而实现步进电动机步矩角的细分。
一般状况下,合成磁场矢量的幅值打算了步进电动机旋转力矩的大小,相邻两个合成磁场矢量之间的夹角大小打算了步矩角的大小。
因此,想要实现对步进电机的恒力矩匀称细分掌握,必需合理掌握步进电机绕组中的电流,使电动机内部合成磁场的幅值恒定,而且每个进给脉冲所引起的合成磁场的角度变化也要匀称。
我们知道在空间彼此相差2/m的m 相绕组,分别通以相位上差2/m而幅值相同的正弦电流,则合成的电流矢量便在空间做旋转运动,且幅值保持不便。
这一点对于反映式步进电动机来说比较困难,由于反应式步进电动机来说比较困难,由于反映式步进电动机的旋转磁场只与绕组电流的肯定值有关,而与电流的正反流向无关。
以比较经济合理的方式对步进电机实现步矩角的任意细分,绕组电流波形宣采纳如图1所示的形式<center style="color: rgb(0, 0, 0); font-size: 14px; line-height: 28px; font-family: simsun; orphans: 2; widows: 2;"</center 其中,为电动机转子偏离参考点的角度。
单片机课程设计——单片机控制步进电机分解

基于单片机的步进电机控制系统设计课题:步进电机的控制专业:机械设计制造及其自动化班级:机101-4姓名组长:学号:同组人:指导老师:姜风国课程设计题目:步进电机控制任务要求:1 完成单片机与功率驱动电路及小功率步进电机的连接。
2 控制步进电机的转动方向、转动速度及转过指定的角度。
3 通过按键改变电机的转向、转速等参数。
任务分配:编写程序绘制电气原理图调试程序对电气原理进行仿真选择各元器件及查询资料目录1步进电机原理及硬件和软件设计 (3)1.1步进电机原理及控制技术 (3)1.2总体设计方框图 (7)1.3设计原理分析 (7)1.3.1元器件介绍 (7)1.3.2方案论证 (10)1.3.3硬件设计 (11)1.3.4软件设计 (17)1.3.5源程序 (22)2.总结 (28)3.结束语 (28)4.参考文献 (29)前言步进电机是一种进行精确步进运动的机电执行元件,它广泛应用于工业机械的数字控制,为使系统的可靠性、通用性、可维护性以及性价比最优,根据控制系统功能要求及步进电机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电机的开环控制系统。
控制系统通过单片机存储器、I/O接口、中断、键盘、LED显示器的扩展、步进电机的环形分频器、驱动及保护电路、人机接口电路、中断系统及复位电路、单电压驱动电路等的设计,实现了四相步进电机的正反转,急停等功能。
为实现单片机控制步进电机系统在数控机床上的应用,系统设计了两个外部中断,以实现步进电机在某段时间内的反复正反转功能,也即数控机床的刀架自动进给运动,随着单片机技术的不断发展,单片机在日用电子产品中的应用越来越广泛,自六十年代初期以来,步进电机的应用得到很大的提高。
人们用它来驱动时钟和其他采用指针的仪器,打印机、绘图仪,磁盘光盘驱动器、各种自动控制阀、各种工具,还有机器人等机械装置。
此外作为执行元件,步进电机是机电一体化的关键产品之一,被广泛应用在各种自动化控制系统中,随着微电子和计算机技术的发展,它的需要量与日俱增,在各个国民经济领域都有应用。
步进电机的细分
步进电机的细分步进电机是一种将离散的电脉冲信号转化成相应的角位移或线位移的电磁机械装置,它具有转矩大、惯性小、响应频率高等优点,已经在当今工业上得到广泛的应用,但其步矩角较大,一般为1.5o~3o,往往满足不了某些高精密定位、精密加工等方面的要求。
实现细分驱动是减小步距角、提高步进分辨率、增加电机运行平稳性的一种行之有效的方法。
本文在选择了合理的电流波形的基础上,提出了基于Intel 80C196MC 单片机控制的步进电机恒转矩细分驱动方案,其运行功耗小,可靠性高,通用性好,具有很强的实用性。
细分电流波形的选择及量化步进电机的细分控制,从本质上讲是通过对步进电机的励磁绕组中电流的控制,使步进电机内部的合成磁场为均匀的圆形旋转磁场,从而实现步进电机步距角的细分。
一般情况下,合成磁场矢量的幅值决定了步进电机旋转力矩的大小,相邻两合成磁场矢量之间的夹角大小决定了步距角的大小。
因此,要想实现对步进电机的恒转矩均匀细分控制,必须合理控制电机绕组中的电流,使步进电机内部合成磁场的幅值恒定,而且每个进给脉冲所引起的合成磁场的角度变化也要均匀。
我们知道在空间彼此相差2p/m的m相绕组,分别通以相位上相差2p/m而幅值相同的正弦电流,合成的电流矢量便在空间作旋转运动,且幅值保持不变。
这—点对于反应式步进电机来说比较困难,因为反应式步进电机的旋转磁场只与绕组电流的绝对值有关,而与电流的正反流向无关。
以比较经济合理的方式对三相反应式步进电机实现步距角的任意细分,绕组电流波形宜采用如图1所示的形式。
图中,a为电机转子偏离参考点的角度。
ib滞后于ia,ic超前于ia。
此时,合成电流矢量在所有区间b=Ime-ja,从而保证合成磁场幅值恒定,实现电机的恒转矩运行。
且步进电机在这种情况下也最为平稳。
将绕组电流根据细分倍数均匀量化后,所得细分步距角也是均匀的。
为了进一步得到更加均匀的细分步距角,可通过实验测取一组在通入量化电流波形时的步进电机细分步距的数据,然后对其误差进行差值补偿,求得实际的补偿电流曲线。
基于单片机的仪表步进电机的细分控制原理及应用

基于单片机的仪表步进电机的细分控制原理及应用仪表步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机某相线圈加一脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,使得在速度、位置等控制领域用步进电机来控制变得非常简单。
虽然步进电机已被广泛地应用,但步进电机并不像普通的直流电机、交流电机那样在常规下使用。
它必须在双环形脉冲信号、功率驱动电路等组成控制系统下使用。
仪表步进电机属于步进电机中体积、功耗较小的类别,可以由单片机或专用芯片的引脚直接驱动,不需外接驱动器,因而在仪表中被用于指针的旋转控制。
需求分析本方案中使用的仪表具有如下特点和设计参数:●指针响应灵敏、走位准确,即收到驱动脉冲后不能丢步;●指针转动平稳,即指针从当前位置到目标位置之间的走位要平稳,正、反转都不能出现抖动;●两相、步距角10o、转动范围300o。
根据技术参数可知,采用两相四拍和两相八拍时的步距角为10o和5o,在300o的范围内只能作30 和60个刻度划分,在实际应用中,会发现指针步距角不能满足要求而且抖动不可避免。
为了实现指针高精度的准确走位和平稳运转,要对步进电机步距进行高分辨率细分,这也是设计的难点所在。
步进电机的细分技术是一种电子阻尼技术,其主要目的是提高电机的运转精度,实现步进电机步距角的高精度细分。
其基本概念为:步进电机通过细分驱动器的驱动,其步距角变小了。
如驱动器工作在10细分状态时,其步距角只为电机固有步距角的十分之一。
以两相四拍为例:当电机工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动10o;而用细分驱动器工作在10细分状态时,电机只转动了1o。
细分功能完全是由驱动器或单片机靠精确控制电机的相电流所实现的,与电机本身无关。
细分原理两相四拍A、B、/A、/B的驱动状态表如表1所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
⑥步进电机存在振荡和失步现象,必须对控制系统和机械负载采取相应措施。
步进电机具有控制和机械结构简单的优点。图 1 是四相六线制步进电机原理图,这类步进电机既可作为 四相电机使用,也可做为两相电机使用,使用灵活,因此和半步方式。以步进角 1.8°四相混合式步进电机为例,在整步 方式下,步进电机每接收一个脉冲,旋转 1.8°,旋转一周,则需要 2OO 个脉冲。在半步方式下,步进电机每 接收一个脉冲,旋转 0.9°,旋转一周,则需要 4OO 个脉冲。控制步进电机旋转必须按一定时序对步进电机 引线输入脉冲。以上述四相六线制电进电机为例,其半步工作方式和整步工作方式的控制时序如表 1 和表 2 所列。
以下是利用 TA8435 控制步进电机的程序,实现采用 l/8 细分方式控制步进电机顺时针方向转动的功 能。利用定时器 1 向 TA8435 输出脉冲,用来控制步进电机转速。
#include<8051.h> #define REFIN P1_5; #define M2 Pl_4} #define-M1 Pl_3; #defineCW Pl_2; #define CLK2 Pl_1; #deflne CLKl P1_O; void C10cklrqHandler(void)interrtlDt 3 //定时器 1 中断程序 {CLK2=!CLK2; TH0=0xef; TL0=0xff; void main()
实现细分方式有多种方法,最常用的是脉宽调制式斩波驱动方式,大多数专用的步进电机驱动芯片都采 用这种驱动方式,TA8435 就是其中一种芯片。
2 基于 TA8435H 芯片的步进电机细分方式 2.1 TA8435 芯片特点 TA8435 是东芝公司生产的单片正弦细分二相步进电机驱动专用芯片,该芯片具有以下特点: ①工作电压范围宽(10~40 v); ②输出电流可达 1.5 A(平均)和 2.5 A(峰值)); ③具有整步、半步、1/4 细分、1/8 细分运行方式可供选择; ④采用脉宽调制式斩波驱动方式; ⑤具有正/反转控制功能; ⑥带有复位和使能引脚; ⑦可选择使用单时钟输入或双时钟输入。 从图 2 中可以看出,TA8435 主要由 1 个解码器、2 个桥式驱动电路、2 个输出电流控制电路、2 个最大 电流限制电路、1 个斩波器等功能模块组成。
2.3 步进电机的应用
图 4 是单片机与 TA8435 相连控制步进电机的原理图。引脚 M1 和 M2 决定电机的转动方式:MI=0、M2=O, 电机按整步方式运转;Ml=1、M2=0,电机按半步方式运转;M1=O、M2=1,电机按 1/4 细分方式运转;Ml=1、M2=1, 电机按 l/8 步细分方式运转。CW/CWW 控制电机转动方向,CKl、CK2 时钟输入的最大频率不能超过 5 kHz。 控制时钟的频率,即可控制电机转动速率。REFIN 为高电平时,NFA 和 NFB 的输出电压为 0.8 V,REFIN 为低 电平时,NFA 和 NFB 输出电压为 0.5 V,这 2 个引脚控制步进电机输入电流,电流大小与 NF 端外接电阻关系 式为:,Io=Vref/Rnf。图 4 中,设 REFIN=l,选用步进电机额定电流为 0.4 A,Rl、R2 选用 1.6 Ω、2W 的 大功率电阻,O、C 两线不接。步进电机按二相双极性使用,四相按二相使用时可以提高步进电机的输出转矩。 D1~D4 快恢复二极管用来泄放绕组电流。
1 步进电机
步进电动机是纯粹的数字控制电动机,它将电脉冲信号转变成角位移,即给一个脉冲,步进电机就转一 个角度,因此非常适合单片机控制。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率 和脉冲数,而不受负载变化的影响,电机则转过一个步距角,同时步进电机只有周期性的误差而无累积误差, 精度高。
步进电机在低频工作时.会有振动大、噪声大的缺点。如果使用细分方式,就能很好的解决这个问题。 步进电机的细分控制,从本质上讲是通过对步进电机励磁绕组中电流的控制,使步进电机内部的合成磁场为 均匀的圆形旋转磁场,从而实现步进电机步距角的细分。一般情况下,合成磁场矢量的幅值决定了步进电机 旋转力矩的大小,相邻两合成磁场矢量之间的夹角大小决定了步距角的大小。步进电机半步工作方式就蕴涵 了细分的工作原理。
2.2 TA8435 细分工作原理
在图 3 中,第一个 CK 时钟周期时,解码器打开桥式驱动电路,电流从 VMA 流经电机的线圈后经 RNFA 后与 地构成回路,由于线圈电感的作用,电流是逐渐增大的,所以 RNFB 上的电压也随之上升。当 RNFB 上的电压大 于比较器正端的电压时,比较器使桥式驱动电路关闭,电机线圈上的电流开始衰减,RNFB 上的电压也相应减 小;当电压值小于比较器正向电压时,桥式驱动电路又重新导通,如此循环,电流不断的上升和下降形成锯齿 波,其波形如图 3 中 IA 波形的第 1 段。另外由于斩波器频率很高,一般在几十 kHz,其频率大小与所选用电 容有关。在 OSC 作用下.电流锯齿波纹是非常小的,可以近似认为输出电流是直流。在第 2 个时钟周期开始 时,输出电流控制电路输出电压 Ua 达到第 2 阶段,比较器正向电压也相应为第 2 阶段的电压,因此,流经步进 电机线圈的电流从第 l 阶段也升至第二阶段 2。电流波形如图 IA 第 2 部分。第 3 时钟周期,第 4 时钟周期 TA8435 的工作原理与第 1、2 是一样的,只是又升高比较器正向电压而已,输出电流波形如图 IA 中第 3、4 部分。如此最终形成阶梯电流,加在线圈 B 上的电流,如图 3 中 IB。在 CK 一个时钟周期内,流经线圈 A 和线 圈 B 的电流共同作用下,步进电机运转一个细分步。
步进电动机有如下特点:
①步进电动机的角位移与输入脉冲数严格成正比。因此,当它转一圈后,没有累计误差,具有良好的跟随 性。
②由步进电动机与驱动电路组成的开环数控系统,既简单、廉价,叉非常可靠。同时,它也可以与角度反 馈环节组成高性能的闭环数控系统。
③步进电动机的动态响应快,易于启停、正反转及变速。
④速度可在相当宽的范围内平稳调整,低速下仍能获得较大转矩,因此一般可以不用减速器而直接驱动 负载。