maya基础教程——脚部建模
MAYA基础培训 第9章
9.2.3
平滑绑定
分配的。如果一个蒙皮物体点完全受一个关
“平滑绑定”方式能使骨架链中的多个
关节共同影响被蒙皮模型表面(皮肤)上同
一个蒙皮物体点,提供一种平滑的关节连接 变形效果。从理论上讲,一个被平滑绑定后 的模型表面会受到骨架链中所有关节的共同 影响,但在对模型进行蒙皮操作之前,可以 利用选项参数设置来决定只有最靠近相应模 型表面的几个关节才能对蒙皮物体点产生变
9.1 骨架系统
9.1.1 9.1.2
课堂案例:创建人体骨架 课堂案例:插入关节Βιβλιοθήκη 9.1.3了解骨架结构
骨架是由“关节”和“骨”两部分构成的。关节位于骨与骨之间的连接位置,由 关节的移动或旋转来带动与其相关的骨的运动。每个关节可以连接一个或多个骨,关 节在场景视图中显示为球形线框结构物体;骨是连接在两个关节之间的物体结构,它 能起到传递关节运动的作用,骨在场景视图中显示为棱锥状线框结构物体。另外骨也
动。动物的运动实际上都是由肌肉来控制的,在肌肉的带动下,筋腱拉动骨架沿着各个关 节产生转动或在某些局部发生移动,从而表现出整个形体的运动状态。但在数字空间中, 骨架、肌肉和皮肤的功能与现实中是不同的。数字角色的形态只由一个因素来决定,就是 角色的三维模型,也就是数字空间中的皮肤。一般情况下,数字角色是没有肌肉的,控制 数字角色运动的就是三维软件里提供的骨架系统。所以,通常所说的角色动画,就是制作 数字角色骨架的动画,骨架控制着皮肤,或是由骨架控制着肌肉,再由肌肉控制皮肤来实 现角色动画。总体来说,在数字空间中只有两个因素最重要,一是模型,它控制着角色的 形体;另外一个是骨架,它控制角色的运动。肌肉系统在角色动画中只是为了让角色在运 动时,让形体的变形更加符合解剖学原理,也就是使角色动画更加生动。
maya基础建模教案

Maya基础建模教案第一章:Maya 2024概述1.1 Maya 2024简介了解Maya 2024的基本功能和应用领域熟悉Maya 2024的用户界面和工作流程1.2 Maya 2024的安装与启动掌握Maya 2024的安装步骤和系统要求学习如何启动Maya 2024并调整界面设置第二章:基础几何建模2.1 创建基础几何体学习使用Maya 2024创建基本几何体如球体、圆柱体、茶杯等熟悉编辑几何体的参数和属性2.2 变换几何体学习使用变换工具对几何体进行移动、旋转和缩放掌握使用变换工具的快捷键和属性设置2.3 修改几何体学习使用Maya 2024的修改器对几何体进行修改,如挤压、细分、布尔操作等熟悉修改器的参数和应用场景第三章:多边形建模3.1 创建多边形网格学习使用Maya 2024创建多边形网格,如四边形和六边形网格熟悉编辑多边形网格的顶点、边和面的操作3.2 编辑多边形网格学习使用编辑工具对多边形网格进行顶点焊接、删除、移动、旋转和缩放等操作掌握多边形网格的循环边和环面编辑技巧3.3 应用多边形建模实例通过实例学习多边形建模的实际应用,如创建一个简单的车辆模型熟悉多边形建模的工作流程和技巧第四章:曲面建模4.1 创建曲面学习使用Maya 2024创建曲面,如NURBS和曲面放样等熟悉编辑曲面的参数和属性4.2 编辑曲面学习使用编辑工具对曲面进行节点编辑、曲线拟合和曲面修剪等操作掌握曲面的变换和修改技巧4.3 应用曲面建模实例通过实例学习曲面建模的实际应用,如创建一个简单的台灯模型熟悉曲面建模的工作流程和技巧第五章:基础动画制作5.1 设置关键帧学习使用Maya 2024设置关键帧对物体进行动画制作熟悉关键帧的添加、编辑和删除操作5.2 添加过渡效果学习使用过渡效果对动画进行平滑过渡和过渡控制掌握过渡效果的参数和应用场景5.3 渲染动画学习使用Maya 2024的渲染功能对动画进行渲染输出熟悉渲染设置和输出选项的设置第六章:Maya 2024材质与纹理6.1 材质基础了解材质在三维建模中的作用学习如何在Maya 2024中创建和应用材质6.2 纹理映射学习纹理映射的基本概念掌握如何在Maya 2024中为模型添加纹理6.3 材质与纹理实例通过实例学习材质与纹理的实际应用熟悉材质与纹理的工作流程和技巧第七章:Maya 2024灯光与摄像机7.1 灯光基础了解灯光在三维建模中的作用学习如何在Maya 2024中创建和调整灯光7.2 摄像机基础了解摄像机在三维建模中的作用学习如何在Maya 2024中创建和调整摄像机7.3 灯光与摄像机实例通过实例学习灯光与摄像机的实际应用熟悉灯光与摄像机的工作流程和技巧第八章:Maya 2024动力学8.1 粒子系统了解粒子系统在三维建模中的作用学习如何在Maya 2024中使用粒子系统8.2 刚体与软体动力学学习刚体与软体动力学的基本概念掌握如何在Maya 2024中设置刚体与软体动力学8.3 动力学实例通过实例学习动力学的实际应用熟悉动力学的工作流程和技巧第九章:Maya 2024渲染与输出9.1 渲染基础了解渲染在三维建模中的作用学习如何在Maya 2024中进行渲染9.2 输出设置学习如何设置输出尺寸、格式和压缩掌握输出设置的技巧和注意事项9.3 渲染与输出实例通过实例学习渲染与输出的实际应用熟悉渲染与输出的工作流程和技巧第十章:综合实例与实战10.1 实例:创建一个茶壶模型综合运用前面学到的建模技巧,创建一个茶壶模型熟悉整个建模的工作流程和技巧10.2 实战:参与一个三维建模项目了解项目需求和制作流程运用Maya 2024进行三维建模,完成项目要求探索三维建模在实际应用中的更多可能性重点和难点解析重点环节1:Maya 2024的用户界面和工作流程补充说明:用户界面包括菜单栏、工具箱、工具架、视图port、属性编辑器等部分。
MAYA建模步骤
课程设计报告课程名称:三维游戏美工设计题目:那样纯洁的爱--鹿狐决恋院(系):计算机学院(软件学院)专业年级:14级软工一班(数媒)学号:141530257姓名:魏加新指导教师:徐丽敏2016年12月20 日目录一.剧情简介 (3)二.主题思想 (3)三.角色设计 (3)四.场景设计 (3)五.实现过程 (3)六.技术难点 (6)七.解决方案 (7)八.作品渲染 (7)九.参考文献 (8)一.剧情简介在一个风景美丽的草原上,有一户人家养着一只小狗和一头小鹿,而在草原的另一边住着一只狐狸。
在一个阳光明媚的一天,这只小狗和这头小鹿一起出去游玩,而就在这天小鹿和小狐偶然相遇了,然而就是那回眸一笑,双方一见钟情,深深的陷入了爱河,就在小狐送给小鹿玫瑰的那一天,小鹿同意和小狐私奔,而早就喜欢这小鹿的小狗就趁机咬死了小鹿,最后小鹿在漫天的玫瑰花下死亡而小狐就伤心的依偎在小鹿身边,久久不忍离去。
反观小狗则是嘿嘿笑着。
二.主题思想主题思想:爱就要爱的纯粹,如果相互喜欢就要敢于追求。
相反,如果不喜欢就要和平结束,不要因爱生恨。
警示:推物及人,不要让动物的悲剧在人的身上重演。
三.角色设计共设计了三个动物角色:小狗、小鹿和小狐四.场景设计分为一部分:室外场景五.实现过程1.创建骨骼2.下肢骨骼装配(1)下肢骨骼IK控制○1.打断盆骨与腿部的连接,再次确定命名,镜像腿部骨骼○2.为腿部添加IK控制柄工具注意:大腿到脚底为RP,脚底到脚掌为SC,脚掌到脚趾为SC(2).下肢控制器○1.创建方盒子,绘制点线○2.复制线框捕捉到脚腕处,调整大小,冻结变换,复制一个到另一侧,同样冻结变换3.命名:“L_con_FOOT”○(3).下肢控制器添加驱动○1.选择脚部控制盒子,为其添加属性○2.锁定并隐藏缩放属性○3.设置驱动关键帧:walk○4.设置驱动脚尖:Top Toe(4).向量约束○1. 创建圆形修改形状○2. 捕捉到膝盖,复制一个○3. 同时移动两个至正前方,删历史,冻结○4. 选择形状和RPIK执行向量约束○5. 把形状P给脚部控制器(方盒子)图一3.腿臂骨骼装配(1).腿骨骼控制○1. 锁定肘关节的旋转X,Z○2. 添加IK控制手柄○3. 复制控制器到手腕的位置(冻结)○4. 2个IK同时P给控制器○5.制作肘关节的极向量约束4.脖子骨骼装配(1).脖子骨骼控制○1. 脖子IK控制手柄○2. 添加控制器到脖子的位置(冻结)图二5.腰部骨骼装配(1).腰部骨骼IK○1. 添加线性IK控制,重置曲线上点的位置至骨节上○2. 创建骨骼并添加骨骼组,先选曲线再选骨骼,执行蒙皮(选定关节)注意:可以使用变形器中的簇制作腰部骨骼控制(2).腰部控制器○1. 创建圆形,复制并吸附到腰部关节(3个),调整外形(删历史,冻结变换)○2. 分别打组,并命名控制器及组:con_spring_01○3. 控制器对控制骨骼做父子约束(3个)(3).腰部高级旋转控制○1. 打开腰部IK的IK解算器属性,启用高级扭曲控制:对象旋转上方向(开始/结束)○1. 绘制1线性的腰部控制○2. 分别把腰部的3个控制器P给腰部总控制器:con_root注意:腰部的线性IK曲线需要打开其属性勾掉其继承变换图四6.蒙皮(1).执行角色的交互式蒙皮注意:先选模型,再选骨骼的最高层级(2).修改交互式蒙皮的影响范围注意:选骨骼,通过缩放调整范围,旋转和位移调整位置六.技术难点1.脖子的拉伸控制;2.腿骨骼的创建;3.腰部的弯曲控制;4.头部的关节控制;5.蒙皮的权重影响范围的调整七.解决方案1.脖子使用测量工具—距离工具,在动画编辑器中的表达式编辑器里输入控制语句来控制脖子的拉伸;2.腿的关节,采用1线性的CV曲线绘制手部曲线,打断曲线,创建关节,同时按C.V键进行吸附,即可创建手臂处关节;3.腰部的弯曲要分级控制,大骨骼控制腰部的线性IK,圆形控制器控制大骨骼,总控制器控制圆形控制器;4.通过胶囊调整骨骼影响的范围,使用笔刷工具调整部分多余受影响的地方,结合模型和控制器的移动一点点调整直至达到预期效果。
MAYA创建三维卡通人——腿部和脚部

第七周创建三维卡通人——腿部和脚部学习目标:用maya制作三维机器人的腿部和脚部。
知识点:1、加线工具的使用。
2、挤压工具的使用。
重点: 1、挤压工具的使用。
课时安排:第七周10课时课后作业:根据所讲知识,熟练的掌握maya人物的布线过程的使用。
制作过程:1.打开正视图我们来看看腿部的位置和结构。
2.选择胯骨底部合适的位置加入线段,将生成的圆洞删除掉。
3.积压圆洞的边缘使其形成向内部延展的洞型结构。
4.复制一个肩膀部分的连接结构作为我们机器人胯骨与腿部的连接结构。
旋转调整位置并缩放它的大小。
5.复制两个之后,我们建立一个圆柱体作为大腿部分的基本模型。
6.给腿部顶端加入几排环形线,然后给环形线的点加上晶格。
7.旋转调整晶格的位置,使其带动模型发生变化。
8.编辑腿部模型底面的线段,积压出一个连接结构。
方法参考手臂连接结构的制作方法。
9.建立一个圆柱体作为小腿部分的基本结构。
调整形状使其符合参考图的形状。
10.积压小腿部分的顶面形成一个平台形状的连接部分。
11.编辑顶面并建立出对应大腿结构的连接部分。
12.选择小腿部分的底面我们来创建腿部和脚部的连接结构。
13.进入侧视图我们来制作机器人的脚。
机器人的脚分为前后两个部分。
14.我们创建一个立方体作为脚的后半部分。
调整点的形状使其符合参考图的形状。
15.加入环形线调整机器人脚部的形状。
16.选择脚部的顶面积压出一个面作为脚踝的连接部分。
给连接部分的四周加入环形线。
17.进入侧视图我们来创建脚的前半部分。
首先建立一个立方体作为基本形状,调整点的位置使其符合参考图的形状,并给模型加入环形线。
18.加入垂直的两条环形线,积压出两个连接结构。
19.选择后脚的部分积压出一个面作为与前脚的连接部分。
20.最后进入立体视图调整一下脚的形状。
这样我们机器人的脚部就做完了。
【教程】Maya逼真人腿模型制作

用Maya 制作一双逼真的腿的模型[s:374]效果图1.如下图所示通过一个box得到大体的脚步轮廓,在这里我主要介绍的是建模的思路,而不是具体的操作步骤,你可以通过各种方法来达到这样的效果。
2.接下来添加细节,下图中脚布线的拓扑结构比较差,这是为了先快速得到一个效果,之后再作修改。
最好的办法是使用真人的照片作为参考,我找到了4张女性的脚部照片,近距离的不同角度,平踩在地面,这正是我需要的。
3.对于那些认为3d建模不需要传统艺术教育的人,我希望接下来的工作会改变一点你的看法。
首先我绘制出脚部的形状,然后分配好布线结构,还有一个横截面的图表现了脚踝后面边的位置4.首先如左下图所示为初始模型添加边,用红色表示。
然后如右下图所示删掉高粱标注的边。
5.如下图所示将标注出的点推向内侧。
6.如下图一系列步骤插入和删除边来添加细节及安排布线结构7.光滑后的模型并不如意,还是缺少细节。
我又重新设计了一张草图,标注出脚部血管和骨节突起的位置。
另外一点,尤其是女性更为明显,就是大拇指第一个指节要比其它脚趾的指节位置低。
添加突起最终拓扑结构选择所有的边,执行Subdiv Surface > Full Crease。
许多人认为使用3或5边形转化为SubD's 会产生不好的影响,尤其是在其它软件中。
不过我从来没有发现因为这个原因会让系统变慢,或在想要平滑的地方产生凹凸(不过MR 还不支持non-quads),虽然保持4边形会让模型整体看起来很整齐,但我个人认为这不是什么重要的问题。
你可以看到,在我的建模方法中就用到了3角形和5边形。
不要担心这些布线,它们同样能做很好的变形效果。
如下图所示。
UV 贴图及纹理:颜色、高光、凹凸。
另一张渲染,使用Maya 默认渲染器,使用depth-mapped spotlight。
maya骨骼绑定详细教程

反转脚1.创建好腿部骨骼和反转脚2.创建腿部ik控制器3.先选择反转脚在选择反转脚离ik最近的骨骼设置点约束如下图坐标轴的位置的骨骼4.在选择反转脚在选择第二个骨骼和脚步骨骼的第二个骨骼设置方向约束5.绿色的是骨骼白色的是翻转角选择蓝色数字1下面的白色骨骼和红色数字1琐事的骨骼便是第四部的设置6.选择蓝色数字2下的白色骨骼和红色数字2所示的骨骼设置方向约束。
要先选择翻转角在选择翻转角上的骨骼约束要保持偏移和所有轴7.下图是脚后跟抬脚脚尖抬脚打组方式控制脚步运动去除刚才翻转角的设置1.选择ik sc 选择脚踝的关节在选择脚中间的骨节打上ik sc2.选择中间的骨节在选择脚尖的骨节打上ik sc3.选择腿部ik 和中间ik 打上组shift 加选两个ik 然后Ctrl+G 打组4.他们的坐标不在中间骨节哪里我们按住d 并且按住v键坐标会自动吸附到骨骼上5.在大纲视图里选中组1 旋转法线脚尖也在运动选择脚尖的ik 按住Ctrl+a 选择ik3的ik控制手柄属性选择粘滞这样脚尖就不会跟着运动了脚中间抬脚6.选择组1在选择脚尖ik 打组将坐标移到脚尖的位置可以做脚尖的抬脚动画7.在对组组3进行打组并将坐标移动到脚跟骨节的位置可以做到脚跟抬脚的动画脚步控制器的制作去除刚才ik sc打组的设置打开反转脚用曲线做出和脚形状类似的形状先选择反转脚在选择线按p键将反转脚和曲线做个父子约束选择曲线将中心调到脚跟位置按d 键v键就可以膝关节控制器的制作选择创建-文本输入l为左脚的控制器选择l 按住d键将坐标调到中间然后按住v键将他吸附到膝关节的位置在往前来一点距离清除历史冻结变换选择控制器选择ik选择极向量约束可以用控制器调节膝关节的移动选择控制器在选择脚步的控制器按住p键将两个做一个父子约束为脚部控制器创建管理属性选择脚步控制器在层编辑器选择编辑-属性-添加属性我们可以为属性命名和最大值最小值初始值层通道盒子会显示刚才添加的属性选择窗口-常规编辑器-连接编辑器打开属性连接面板选择关节9即是我们要用这个属性控制的关节点击重新加载右侧在左侧找到抬脚属性一般在最下面在选择右侧在右侧找到关节9的z轴旋转属性rotatez 即是z轴的旋转属性然后直接关闭属性连接器调整抬脚属性的数值看看有没有变化按住中键左右拖动改变数值如果感觉第一次设置的抬脚属性的数值不满意可以选择抬脚-编辑-编辑属性选择抬脚改变数值同样的方法为关节9设置左右旋转的属性为脚尖设置抬脚的属性设置受驱动关键帧控制抬脚去除刚才属性编辑器的设置重新添加抬脚属性设置-20 最大值20默认值0选择抬脚属性编辑-设置受驱动关键帧加载抬脚属性为驱动者选择骨骼7 ,8 ,9加载受驱动者除了离ik最近的骨骼其他三个要全选选择脚步控制器的抬脚数值输入0在选择关节9选中要控制的轴点击驱动关键帧的关键帧选项就给这个动作在抬脚数值是0的时候设置了关键帧然后选择抬脚属性将属性设置为10 选择关节9的z轴然后调整z轴旋转的位置点击关键帧这样就在当抬脚属性是10的时候z轴旋转的位置接着为关节7设置属性和关节9一样只不过他的数值不是0-10而是10到20 当抬脚属性是10的时候关节8是一个状态当关节8是20的时候又是一个状态关节7同样设置可以0—20之间做出变换属性手指关节的创建1.新建一个平面2.将平面移动到小指处将平面作为参考面做出骨骼平面分段为10.103.选择激活选定对象最后一个磁铁就是激活选定对象4.选择骨架进行创建骨骼5.选择骨架确定关节方向使关节方向一致6.同样的方法为大拇指创建骨骼7.8.完成人体的绑定在绑定下部的时候要多留一个骨节作为选择所有骨节的关节9.将做好的骨骼ik 控制器分别放进不同的层里手臂骨骼绑定ik控制器首先为手臂创建ik控制手柄在为手臂创建控制器,一般先用圆形曲线做控制器选择圆形控制器选择ik进行点约束保持偏移所有坐标在选择控制器选择手关节进行方向约束用圆形控制器控制手骨骼的旋转选择创建-定位器将定位器放置到手肘的关节上按v键吸附到手肘的位置向后移动一下位置选择定位器选择ik 给他们添加极向量约束这样手臂在运动的时候手肘也会运动的还有一种方法可以控制肘部就是连接编辑器为圆形控制器添加属性zhoubu为zhoubu添加属性最大10最下-10默认0选择zhoubu-编辑-连接属性编辑器用zhoubu控制ik的twist属性就是ik的扭曲属性手指关节的控制器创建一个圆形的控制器来控致手指的弯曲我们为控制器创建一个弯曲z轴的属性选择弯曲z-属性-连接编辑器-选择弯曲z选择手指关节3跟关节都选上然后在编辑器里选择载入右侧选择关节的z轴旋转属性在选择第二个关节如上图选择重新载入右侧我们重新选择第二跟关节的z轴旋转选择第三根关节选择编辑器里重新载入右侧我们重新为最后一个关节连接旋转属性也就是用控制器的旋转属性控制三根骨节的z轴旋转选择控制器在添加一个y轴的旋转添加y轴旋转只要选择手指控制器和手指关节创建一个xuanzhuany轴的属性连接编辑器只要对3跟骨节创建一个整体的旋转就可以了其他手指的创建和上面的方法一样另外做完后要为手指控制器和手部控制器做一个父子连接将手指控制器p到手控制器上手臂fk控制器的创建创建一个圆形的控制器将他移动到肩部手臂跟骨骼分别复制出来3个园来控制手臂第三个园为了区分我做成四角形的因为我们只用到旋转命令所以我们将用不到的选项锁定并隐藏选择肩部的圆圈在选择手臂骨骼对其进行方向约束选择肘部的圆圈在选择肘部的骨骼对其进行方向约束选择手部的四角形在选择手部的骨骼对其进行方向约束做好约束之后因为有ik控制器所以fk不起作用我们创建一个圆形的控制器将他吸附到肘部关节的位置调整大小向后面移动一段距离清除历史冻结变换为控制器创建一个属性属性的最大值为1最小值为0当最大值为1时受ik控制大控制器的ikfk属性是0时受fk 控制选择ikfk-编辑-设置受驱动关键帧将ikfk设置为驱动者加载将ik设置为受驱动者加载当ikfk等于0时ik混合选项等于0设置关键帧当ikfk等于1时ik混合选项等于1设置关键帧选择肘部的圆形控制器在选择肩部的控制器做一个父子连接选择四角形控制器在选择肘部控制器做一个父子连接这样其他两个控制器就会随着肩部控制器运动选中手指控制手指控制器现在和手的控制器是在一个组里我们选中手指控制器按住shlft+p进行解组重新选择手指控制器然后选择手腕的骨骼将控制器和手腕p到一起我们点击手腕的骨骼发现手腕即受ik控制器的控制又受fk 控制器的控制我们选择手腕下面的ikfk属性选择设置受驱动关键帧一定要选择下面的属性在选择加载受驱动者Nurbs Circle 3w0 这个是ikNurbs Circle 10w1 这个是fk有可能和大家的显示不一样一般上面是ik 下面是fk模型上面的控制器太多我们可以选择ikfk的控制器当ikfk控制器是1的时候让ik控制器显示fk控制器隐藏选择ikfk控制设置驱动关键帧将ikfk加载成驱动者将ik控制器加载为受驱动者当ikfk等于1是ik的可见性为显示设置关键帧当ikfk等于0时ik的可见性等于不显示设置关键帧Fk同样的方法设置设置脊椎控制器首先做出五个园分别代表头部颈椎胸部腰部重心(臀部)控制器将五个控制器吸附到相应的骨骼上选中头部骨骼对其进行方向约束再选中脖子的骨骼将脖子的骨骼p给头部控制器这样头部控制器就是脖子的子物体以此做出前四个的控制器最后一个控制器需要父对象因为他不只有旋转还有移动选择骨骼断开臀部的父子连接编辑菜单最下面shift+p 断开连接我们让上半身控制上半身下半身控制下半身在做一个上半身的控制器选中骨骼选中控制器按p 让控制器控制上半身在选择骨骼控制下半身的控制器同样p上去选择下半身控制器加选上半身控制器按p键进行父子连接现在手臂控制没有跟着运动我们做一个肩部的控制器给他和肩部骨骼做一个方向约束然后将手臂控制器p给肩部再将肩部p给胸部控制器。
Maya基础训练教程反转脚的设置
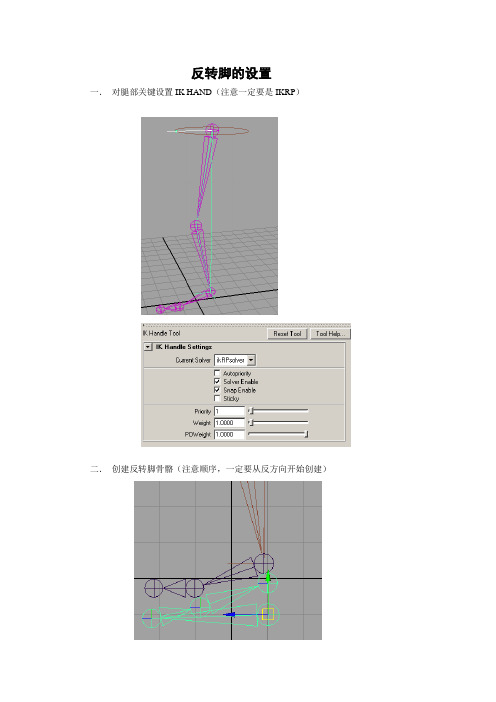
反转脚的设置
一.对腿部关键设置IK HAND(注意一定要是IKRP)二.创建反转脚骨骼(注意顺序,一定要从反方向开始创建)
三.给脚部的两节骨骼创建IK HAND(注意IK HAND的类型要改为IKSC)
四.对脚部的IK手柄和创建的反转脚骨骼进行父子关系(parent)
1.对脚踝处的IK手柄与反转脚的末端球型骨节进行父子关系(先选IK手柄再shift
选球型骨节,然后P一下)
2.再对脚面处的IK手柄和反转脚的末端第二段骨节进行父子关系(步骤与上面一
致)
3.最后对脚趾处的IK手柄和反转脚的末端第三段骨节进行父子关系(步骤同上)
4.旋转反转脚骨骼测试绑定是否正确。
MAYA人体骨骼绑定教学总结
M A Y A人体骨骼绑定人体骨骼绑定1:脚部骨骼绑定1,腿部绑定有两种方式,一种格式创建反转骨骼,一种是控制器打组方式。
反转脚的建立:,首先选择末端关键,再选择脚部IK创建点约束。
要做抬脚动画,选择末端关节,在选择脚部骨骼绑定方向约束,接着选择倒数第二段关节,再选择脚部末端关节,同样加一个方向约束。
打组方式绑定:打组方式要把脚部两个关节也打上IK,用IS。
把脚部IK(1)和脚掌IK (2)打组,如果抬脚跟动作是,脚尖也跟着动,可以进入脚尖IK(3)属性,选粘带。
以脚尖抬脚跟,然后和3打组,把中心放到3上。
同样要做抬脚尖的动作,就把前面的打组,把中心方脚跟关节。
二.脚部控制器的创建一个圆环,调整跟叫差不多,选择反转脚,再选择控制器,按P创建父子连接。
最后把控制器中心放到脚跟。
三.膝盖控制器1,把控制器归零操作。
不能直接清零,要把历史记录删去,再,。
控制腿部的旋转,创建一个文本或则其他图形,调整位置,然后清零(冻结变化),选择控制器,再选择IK在用极向量约束。
,最后为了让腿部控制器跟随脚部运动,选择脚部控制器在选择脚部控制器,按P建立父子连接。
四.为脚步控制建立管理属性(关联控制)。
有两种方法控制属性,一种是连接控制器控制,一种是设置驱动关键帧控制。
1.选择控制器,添加属性,,4,为脚部控制器创建管理属性,在左侧找到刚才添加的属性名称,再右边找到要控制的属性名称,关闭就可以。
2.设驱动关键帧控制属性。
添加属性后,选择控制器,加载驱动者,选翻转脚骨骼3,加载受驱动,选择要驱动的轴向。
可以用一个属性控制几个属性,不可以多个控制一个。
原始打一个关键帧,调关键帧帧数,再调驱动者的运动,再调受驱动者的运动,打关键帧,完成。
2,CTRL+D复制快捷键。
Ctrl+G打组。
五.脊柱骨骼绑定1、,要对某个关节调节,按INSERT键调节。
脊柱绑定操作1.脊柱绑定一般用FK绑定,在脊柱上设置5个控制器,,选着控制器再选择要绑定的关节用方向约束,为了让控制在控制时能跟随运动,选着下一个骨骼在选择控制器,按P键添加一个连接,例如:头部的控制器,就要和颈部的骨骼建立连接。