参数设置(精)
VASP参数设置详解(精)
VASP参数设置详解计算材料2010-11-30 20:11:32 阅读197 评论0 字号:大中小订阅转自小木虫,略有增减软件主要功能:采用周期性边界条件(或超原胞模型)处理原子、分子、团簇、纳米线(或管)、薄膜、晶体、准晶和无定性材料,以及表面体系和固体l 计算材料的结构参数(键长、键角、晶格常数、原子位置等)和构型l 计算材料的状态方程和力学性质(体弹性模量和弹性常数)l 计算材料的电子结构(能级、电荷密度分布、能带、电子态密度和ELF)l 计算材料的光学性质l 计算材料的磁学性质l 计算材料的晶格动力学性质(声子谱等)l 表面体系的模拟(重构、表面态和STM模拟)l 从头分子动力学模拟l 计算材料的激发态(GW准粒子修正)计算主要的四个参数文件:INCAR ,POSCAR,POTCAR ,KPOINTS,下面简要介绍,详细权威的请参照手册INCAR文件:该文件控制VASP进行何种性质的计算,并设置了计算方法中一些重要的参数,这些参数主要包括以下几类:对所计算的体系进行注释:SYSTEM●定义如何输入或构造初始的电荷密度和波函数:ISTART,ICHARG,INIWA V●定义电子的优化–平面波切断动能和缀加电荷时的切断值:ENCUT,ENAUG–电子部分优化的方法:ALGO,IALGO,LDIAG–电荷密度混合的方法:IMIX,AMIX,AMIN,BMIX,AMIX_MAG,BMIX_MAG,WC,INIMIX,MIXPRE,MAXMIX–自洽迭代步数和收敛标准:NELM,NELMIN,NELMDL,EDIFF●定义离子或原子的优化–原子位置优化的方法、移动的步长和步数:IBRION,NFREE,POTIM,NSW–分子动力学相关参数:SMASS,TEBEG,TEEND,POMASS,NBLOCK,KBLOCK,PSTRESS–离子弛豫收敛标准:EDIFFG●定义态密度积分的方法和参数–smearing方法和参数:ISMEAR,SIGMA–计算态密度时能量范围和点数:EMIN,EMAX,NEDOS–计算分波态密度的参数:RWIGS,LORBIT●其它–计算精度控制:PREC–磁性计算:ISPIN,MAGMOM,NUPDOWN–交换关联函数:GGA,VOSKOWN–计算ELF和总的局域势:LELF,LVTOT–结构优化参数:ISIF–等等。
如何进行参数设置(SET-UP)(精)

3.1.4 如何进行参数设置(SET-UP)要进行参数设置(SET-UP)须按以下操作进行:●关机。
●同时按下STATION1和STATION2键,然后开机,直到打印机初始化动作完成。
●在进纸槽中插入一张A4规格的纸。
这时,打印机打印出一行提示信息:按STATION1认可当前参数按STATION2选择下一参数按LOCAL开始设定参数●按下LOCAL键,机器进入设置状态。
同时打印出如下一行:MENU:配置模式●如果这时按下STATION1键,将意味着认可当前参数“配置模式”项,并对“配置模式”下的“配置参数设置”逐一进行选择。
●如果这时按下STATION2键,将意味着不选择当前参数“配置模式”项,这时打印机将打印出:IBM配置同理:如果接下来按下STATION1键,将意味着认可当前参数选项(“IBM配置”),并对其下的“配置参数设置”逐一进行选择。
如果这时按下STATION2键,将意味着不认可当前参数选项,这时打印机又将打印出下一选项,直至进入“配置参数设置”逐一进行选择。
●进入“配置参数设置”,“配置参数设置”是进入了“配置模式”、“IBM配置”、“OLIVETTI配置”、“水平磁条选件”(配有水平磁条选件才有此选项)、“OKI配置”和“LQ配置”之中的任何一种选择后进行的子项选择。
进入“配置参数设置”项后,须操作STATION1键和STATION2键对配置参数进行设置。
SET-UP进程根据操作者选键的不同而进行不同的子流程。
a. 按下STATION1键,则选取当前选项提示出的数据或某种操作方式。
同时又进入到下一选择项。
b. 按下STATION2键,则不打算选取当前选项提示出的数据或某种操作,要求重新选择。
这时又会提示出新的数据或某种操作以供选择。
重复上述a或b的操作即可完成“配置参数设置”的工作。
●当进入“配置模式”、“IBM配置”、“OLIVETTI配置”、“水平磁条选件”、“OKI配置”和“LQ配置”,每一项设置完成后都会打印出:“存参数?”●存参数同样按照上述a或b的操作即可实现你设定的参数存储与否。
ProE数控加工参数设置经验(精)
ProE数控加工参数设置经验(精)Pro/ENGINEER是由美国PTC公司研制的一套CAD/CAE/CAM 软件,是目前国内外最为流行的3D CAD/CAE/CAM软件之一,在Pro/NC中设置加工参数不仅需要熟悉Pro/NC加工的设置流程及各加工参数的确切含义,更重要的是要熟悉数控加工编程中工艺参数的选择对加工质量的影响,否则不仅不能保证产品质量,而且容易导致过切等现象,甚至损坏加工设备,给生产单位造成重大损失。
本文介绍了Pro/NO 加工的一般流程和常用参数的含义,分析和探讨了Pro/NC 软件环境中工艺参数的设定方法和原则。
一Pro/NC制造过程操作流程Pro/ENGINEER目前的流行版本为wildfire 3.0,其NC模块由Pro/NC-MILL、Pw/NC-TURN、Pro/NC-WEDM、PDo/NC-ADVANCED几个小模块组成,用户在使用时,并不需要去分辨当前是在哪一个模块下操作,只需在操作界面中根据加工需要进行设置,系统会自动调用相应的模块去处理。
Pro/ENGINEER能够生成数控加工的全过程,其工作过程是利用计算机(CAD)的图形编辑功能,将零件的几何图形绘制到计算机上,形成零件的图形文件,然后直接调用计算机内相应的数控编程模块,进行刀具轨迹处理(即建立操作及定义NC工序。
建立操作用于设置机床类型、刀具类型、机床坐标和退刀面的位置等,而定义NC工序用于设置待加工的曲面以及切削参数,每一个操作定义了若干个关联的NC工序),由计算机对零件加工轨迹的每个节点进行计算和数学处理,从而在生成刀位数据文件后,进行相应的后处理,自动生成数控加工程序,并在计算机上动态地显示刀具的加工轨迹图形H1。
在加工设备不变的条件下,实际上问题的关键是刀具的选择与切削用量的确定。
二、选择刀具和安排刀具排列顺序的基本原捌(一)选择刀具数控加工刀具必须适应数控机床高速、高效和自动化程度高的特点,一般应包括通用刀具、通用连接刀柄及少量专用刀柄。
扫描仪有关参数设置调整的说明(精)
二、分辨率设置
如图将分辨率设置为300×300
三、亮度、对比度设置
亮度、对比度设置为:128,128。各扫描人员可以根据实际 情况,对亮度、对比度反复测试,调整最佳数值。
四、扫描仪自动去黑边设置
正常情况上、下、左、右设置为‘5’,黑边比较大 的情况下设置为‘8’。
上述设置供各区县参考,在此我们也
希望大家在扫描中加强责任心,认真细致, 不断总结扫描经验,总结共性规律,供全 市档案扫描人员参考借鉴。切实提高我市 电子档案扫描质量。
扫描仪有关参数设置调整的说明
经过6-9月电子档案质量抽查和10月份全市电子档案
全部审核,各区县电子档案质量有所提高,但在扫描清晰
度、标引、档案分类等方面仍然存在这样那样的问题。一
方面是对电子档案技术规范、扫描业务不很熟悉有关,同
时和扫描仪的相关设置不当也有一定的关系。通过这几个
月的质量抽查,我们也在了解电子档案质量比较好的区县
扫描仪的设置情况,总结共性规律供全市电子档案扫描参
考借鉴。如朝阳、大兴、己好的做法。现就实际中
扫描仪有关设置调整说明如下:
一、阴影 高光度设置
点选如图‘高级’按钮
图像模式选‘灰度’,预设伽玛值选‘自定义’,阴影
设置‘50’,高光度设置‘200’。如果执照复印件字浅, 可以调大阴影,高光度不变。(各区县可不断摸索,根据实 际情况调整出最佳数值。)
3PLC程序的PID参数的设定与调节(精)
PID参数的设置与调节PID控制简介目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
智能控制的典型实例是模糊全自动洗衣机等。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口﹑执行机构﹐加到被控系统上﹔控制系统的被控量﹐经过传感器﹐变送器﹐通过输入接口送到控制器。
不同的控制系统﹐其传感器﹑变送器﹑执行机构是不一样的。
比如压力控制系统要采用压力传感器。
电加热控制系统的传感器是温度传感器。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器(intellig ent regulator),其中PID控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
有利用PID控制实现的压力、温度、流量、液位控制器,能实现PID控制功能的可编程控制器(PLC),还有可实现PID控制的PC系统等等。
可编程控制器(PLC)是利用其闭环控制模块来实现PID控制,而可编程控制器(PLC)可以直接与Cont rolNet相连,如Rockwell的PLC-5等。
还有可以实现PID控制功能的控制器,如Rockwell的Logix产品系列,它可以直接与Contro lNet相连,利用网络来实现其远程控制功能。
1、开环控制系统开环控制系统(open-loop control system)是指被控对象的输出(被控制量)对控制器(controller)的输出没有影响。
在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
2、闭环控制系统闭环控制系统(closed-loop control system)的特点是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个闭环。
欧陆590开卷应用参数设置明细(精)
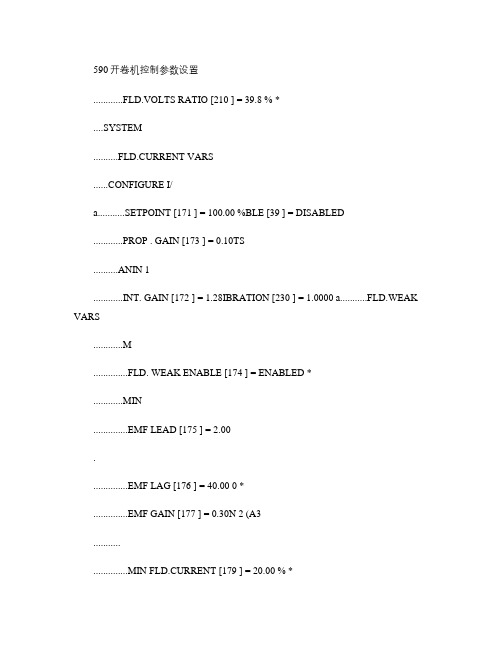
590开卷机控制参数设置............FLD.VOLTS RATIO [210 ] = 39.8 % *....SYSTEM..........FLD.CURRENT VARS......CONFIGURE I/a...........SETPOINT [171 ] = 100.00 %BLE [39 ] = DISABLED............PROP . GAIN [173 ] = 0.10TS..........ANIN 1............INT. GAIN [172 ] = 1.28IBRATION [230 ] = 1.0000 a...........FLD.WEAK VARS............M..............FLD. WEAK ENABLE [174 ] = ENABLED * (I)..............EMF LEAD [175 ] = 2.00...............EMF LAG [176 ] = 40.00 0 *..............EMF GAIN [177 ] = 0.30N 2 (A3.........................MIN FLD.CURRENT [179 ] = 20.00 % *............MAX VALUE..............MAX VOLTS [178 ] = 98.00 % *............CALIBRATION [2..........IMAX BRK1(SPD1 [93 ] = 200.0 % *............MAX VALUE [240..........IMAX BRK2(SPD2 [33 ] = 200.0 % *............MIN VALUE [2h.......INVERSE TIMEh.........AIMING POINT [204 ] = 110.00 %TION TAG [250 ] = 439 * h.........DELA Y [199 ] = 10.0 SECS..........ANIN 5 (A6a.........CONTACTOR DELAY [302 ] = 1.0 SECS *..........CURR DECAY RATE [594 ] = 0.00..........ANOUT 1 (A7..........PROG STOP TIME [26 ] = 0.1 SECS = 100.00 %a.........PROG STOP LIMIT [216 ] = 60.0 SECS = FALSE..........PROG STOP I LIM [91 ] = 100.00 %.00 %..........STOP ZERO SPEED [29 ] = 2.00 % 62 ........CALIBRATION.ANOUT 2 (A8..........CONFIGURE ENABLE [39 ] = DISABLED [248 ] =100.00 % ............SOURCE TAG..........FIELD CURRENT [5 (I)..........ARMATURE V CAL. [20 ] = 1.0000DIGITAL INPUT C4..........IR COMPENSATION [21 ] = 0.00 %..........ENCODER RPM [22 ] = 1000 RPM............DESTINATION TAG [49a.........ENCODER LINES [24 ] = 1500 *..........DIGIN 1 (C6..........ANALOG TACH CAL [23 ] = 1.0000 [103 ] = 0.01 %..........ZERO SPD. OFFSET [10 ] = 0.00 %OR FALSE [104 ] =0.00 % ..........ARMATURE I (A9 [25 ] = BIPOLAR..DESTINATION TAG [102 ] = 228a.........SPDFBK ALM LEVEL [180 ] =..........DIGIN 2 (C7........INHIBIT ALARMSE [110 ] = 0.00 %..........FIELD FAIL [19 ] = ENABLED............DESTINATION TA..........5703 RCV ERROR [111 ] = ENABLEDa.........STALL TRIP [28 ] = ENABLED..........DIGOUT 1 (B5a.........TRIP RESET [305 ] = TRUEHOLD (> [195 ] = 0.00 % ..........SPEED FBK ALARM [81 ] = ENABLED............MODULUS [43 ] = TR..........ENCODER ALARM [92 ] = ENABLED............SOURCE TAG [97 ]..........DIGOUT 3 (B7..........DISCONTINUOUS [137a.........ADDITIONAL DEM [30 ] = 0.00 % ] = TRUEa.........BIPOLAR CLAMPS [90 ] = DISABLED] = 125..........REGEN MODE [201 ] = 4Q (REGEN [361 ] = FALSE..........MASTER BRIDGE [527 ] = OFF 5703...................POS. I CLAMP [301 ] =..........CUR.LIMIT/SCALER [15 ] = 100.00 %.RAISE/LOWER DEST [260 ] = 0 ........SPEED LOOP............SPD.PROP .GAIN [14 ] = 5.00 *..........RAMP O/P DEST [293 ] =..........SPD.INT .TIME [13 ] = 0.641 SECS *......SPEED ERROR [297 ]a.........INT . DEFEAT [202 ] = OFFUM 1 DEST [294 ] = 289 ..........PRESET TORQUE [595 ] = 0.00 %CURRENT DEMAND [299 ] = ..........PRESET T SCALE [604 ] = 100.00 % = 0..........ENCODER SIGN [49 ] = POSITIVE= 0.0..........SPEED FBK SELECT [47 ] = ANALOG TACH * 420 *S. I CLAMP [87 ] = 0.0 %..........SPD.FBK.FIL TER [547 ] = 0.000..........POS...............SPD BRK1 (LOW [269 ] = 1.00 %....................SPD BRK2 (HIGH [270 ] = 5.00 %..NEG. I CLA..............PROP . GAIN [271 ] = 5.00......AT CURRENT LIMIT [42 ] = F..............SPD.INT .TIME [272 ] = 0.500 SECS...............SOURCE TAG [36............I GAIN IN RAMP [274 ] = 1.0000......DRIVEh...........POS. LOOP P GAIN [273 ] = 0.00 % ............DESTINATION TAG ............ZERO SPD. QUENCH [212 ] = STOP ..............ZERO SPD. LEVEL [284 ] = 0.50 % ..........LINK 3E [169 ] = D ..............ZERO IAD LE..........SETPOINTS..........DESTINATI ............SETPOINT 1......DIGITAL I............SIGN 2 (A3 [9 ] = POSITIVE.......LINK 8 ......................RATIO 2 (A3 [7 ] = 1.0000 ............SETPOINT 2 (A3 [290 ] = 0.04 %G [461 ] = 0 ............SETPOINT 3 [291 ] (C7...............SETPOINT SUM 1392 ] = OFF ..........RATIO 1 [6 ] = 1.0000..RAMP OUTP .................RATIO 0 [208 ] = 1.0000a.........SIGN 1 [8 ] = POSITIVE............AUX.SOUa.........SIGN 0 [292 ] = POSITIVEa.........DIVIDER 1 [419 ] = 1.0000..........LINK 12..........DIVIDER 0 [420 ] = 1.0............ILOOP PI MODE [163 ]a.........INPUT 1 [100 ] = 0.00 %...........a.........INPUT 0 [309 ] = 0.00 %......PASSWORD.....TOGGLE RE........ENTER PASSWORD [120 ] = 0x0000.....h.......BY-PASS PASSWORD [526 ] = FALSEPD [166 ] = 2a.......CHANGE PASSWORD [121 ] = 0x0000AL RE............TOGG......ALARM STATUSST ALARM [528 ] = NO ACTIVE ALARMS10 ] = ENABLEDUX DIGOUT 2 [95 ] = OFF a.......HEALTH WORD [115 ] = 0x0000....a.......HEALTH STORE [116 ] = 0x0000 1 *FF ........THERMISTOR STATE [337 ] = FALSE..ANOUT 1 ......SERIAL LINKSE [497 ]........TEC OPTION..........TEC OPTION TYPE [500 ] = NONE] = OG/SLACK ..........TEC OPTION IN 1 [501 ] = 0 ............II [154 ] = 0..........TEC OPTION IN 2 [502 ] = 0........RAMP RATE [355 ]..........TEC OPTION IN 3 [503 ] = 0ESTR CHK [229 ] = 2 ..........TEC OPTION IN 4 [504 ] = 0R ............MIN BS DEAD..........TEC OPTION IN 5 [505 ] = 0 ............PLL..........TEC OPTION FAULT [506 ] = NONE ..........P3 SETUP............MODE [130 ] = {0005} *ANALOG IP OFFSET [265 ] = 2 ............5703 SUPPORT..................SETPT. RATIO [132 ] = 0.0000........................SETPT. SIGN [133 ] = POSITIVE....................RAW INPUT [187 ] = 0.00 %........................SCALED INPUT [189 ] = 0.00 %......mi............BISYNCH SUPPORT.VALUE 1 [339 ] = ..............GROUP ID (GID [329 ] = 0x0000........VALUE 2 [340 ] =..........UDP XFER (TX [345 ] = 0.00..........VERSION NUMBER [155 ] = 0x0702........VALUE 8 [379 ] = 0........PNO CONFIG..........PNO 112 [312 ] = 0 [380 ] = 0.00 %..........PNO 113 [313 ] = 0VALUE 10 [381 ] = 0.00 % ..........PNO 114 [314 ] = 0 ........VALUE 11 [38..........PNO 115 [315 ] = 0........VALU..........PNO 116 [316 ] = 0..........PNO 117 [317 ] = 0 0.00 %..........PNO 118 [318 ] = 14..........PNO 121 [321 ] = 3800 %FF..........PNO 122 [322 ] = 381] = 0.00 %..........PNO 123 [323 ] = 382RROR [297 ] = 0.00 % ..........PNO 124 [324 ] = 383.SPEED LOOP O/P [549 ] = 0.00 % ..........PNO 125 [325 ] = 384 [352........CURRENT DEMAND [299..........PNO 126 [326 ] = 385 [353 ] = OFF........CURRENT..........PNO 127 [327 ] = 0......SYSTEMENT FBK.AMPS........SOFTWARE0 AMPSa.......CONFIGURE I/O...............CONFIGURE ENABLE [39 ] = DISABLED...............ANALOG INPUTS] = 0.0 % ............ANIN 1 (A2a.......POS...............CALIBRATION [230 ] = 1.000 ............ANIN 2 (A3.................CALIBRATION [233 ] = 1.0000 ] = FALSE .................MAX VALUE [234 ] = 100.00 % a.......A T ZE..............MIN VALUE [235 ] = -100.00 % a.......A T STANDSTILL [79 ..............OUTPUT [493 ] = 0.04 %a.......RAMPING [113 ] = FALSE ............ANIN 3 (A4a.......PROGRAM STOP [ ..............CALIBRATION [236 ] = 1.0000 ........COAST STOP [525 ] = FALSE ] = ..............MAX VALUE [237 ] = 100.00 % [82 ] = OFF (I)..........PRO..............MIN VALUE [238 ] = -100.00 %a.......OPa..................MODULUS [362 ] = FALSEa.......DIGITAL I..............OFFSET [464 ] = 0.00 %SECSa.......DIGITAL INPUT C5 [7..............SOURCE TAG [251 ] = 0 *.....DIGIN 1 (C6 [71 ] = OFF............ANOUT 2 (A8.DIGIN 2 (C7 [..............% TO GET 10V [248 ] = 100.00 %N 3 (C8 [73 ] = OFFED GAIN [475 ] = 0 ..............MODULUS [363 ] = FALSE ON........TENS+COMP CALC...............OFFSET [465 ] = 0.00 % [487 ] = 0.00 %a.......DIGOUT 3..............SOURCE TAG [252 ] = 0 *COMP........RAISE/LOWER O/P [264 ] = 0...........DIGITAL INPUTS..........REWINDa...........DIGITAL INPUT C4 0.00 %..............DESTINA TION TAG [494 ] = 496 = FALSEa...a...........DIGITAL INPUT C5.00 %480 ] =..............VALUE FOR TRUE [106 ] = 10.00 % *..........TENSION SC........BACK EMF [60 ] =..............VALUE FOR FALSE [107 ] = 0.00 %.ARM VOLTS FBK [605 ] = 0 VOLTSD ENABLE..............DESTINA TION TAG [105 ] = 100 *UT [308 ] = 0.0 %L MODE IS [209 ] = CURRENT C............DIGIN 3 (C8.TACH INPUT [58 ] =..............VALUE FOR TRUE [109 ] = 0.01 %........ENCODER [206 ] = 0 RPM210 ] = ..............VALUE FOR FALSE [110 NFIL.ENCODER..............SOURCE TAG [97 ] = 77LED *.....................INVERTED [359 ] = FALSEEMF LEAD [175 ] =......SETUP............DIGOUT 2 (B6........RAMPS..................THRESHOLD (> [196 ] = 0.00 %3.0 SECS *..........................MODULUS [44 ] = TRUEE [3 ] = 3.0 SECS *..............SOURCE TAG [98 ] = 122.......CONSTANT ACCEL [4 ] =ENABLED ..............INVERTED [360 ] = FALSE.......RAMP HOLD [118 ] = OFF%* ............DIGOUT 3 (B7..........INVERT [..............THRESHOLD (> [19 [..........BLOCK DIAGRAM (I)a...............RAMP O/P DEST [293 ] = 291.a.......AUX............SPT SUM 1 DEST [294 ] = 289 = ON......IN.......a...........PID O/P DEST [400 ] = 0 [204 ]..........AUX ENABLE [168 ] = ONa...........DIAMETER [431 ] = 128 *.AUX DIGOUT 1 [94 ] = OFFSa...........TAPER [442 ] = 129 * 2 [95 ] = OFF [200 ] = 60.0 SEC a...........SETPOINT SUM 2 [450 ] = FF......STOP RATES............LINK 1O..............SOURCE TAG [364 ] = 62 *............JOG SETPOINT [513 ] = 5.00..............DESTINA TION TAG [365 ] = 437 *.......LOCAL KEY ENABLE [511 ] = TRUE00 % ............LINK 2......................SOURCE TAG [366 ] = 5 *........SETPOINT [519 ] = 0.00 %................DESTINA TION TAG [3..............DESTINA TION TAG [371 ] = 0..................LINK 5ECEL TIME [515 ]..............SOURCE TAG [454 ] = 0........OVER S........JOG/SLACK=..............DESTINA TION TAG [455 ] = 0 5.00 %.....FIELD I CAL. [182 ] =1.0000 ............LINK 6EED 2 [219 ] =..............SOURCE TAG [456 ] = 0..............TAKE UP 1 [253 ] = 5...............DESTINA TION TAG [457 ] = 0......TAKE UP 2 [254 ] = -5.00 % ............LINK 7......................SOURCE TAG [458 ] = 0............LINK 10 [262 ] = FALSE..............SOURCE TAG [469 ] = 0.MIN VALUE [258 ] = -100.00 %TOTUNE ..............DESTINA TION TAG [470 ] = 0 [259 ] = 100.00 %WARD [136 ] = 2.00............LINK 11...EXTERNAL RESET..............SOURCE TAG [390 ] = 0 %........PRESET SPEEDS..............DESTINA TION TAG [391 ] = 0..........SELECT..............ADVANC..............SOURCE TAG [395 ] = 0 ] = FALSE.....................DESTINA TION TAG [396 ] = 0..........INPUT 0 [564 ]..............ADVANCED [397 ] = OFF [14 ] =..........INPUT 1 [565 ]..............MODE [398 ] = SWITCH. TIME CONS ..........INPUT 2 [566..............AUX.SOURCE [399 ] = 0..........INPUT 3 [567 ] = 0.0h.......RESERVEDh.........FACTORY USE ONLY] = 0.0OSITIVE h...........DO NOT ALTER !!.....INPUT 5 [569 ] = h.............MIN MMI CYCLE TM [162 ] = 0x00A0...INPUT 6 [570 ] = 0.0 ........ADVh.............ILOOP PI MODE [163 ] = 0x0002 0.0 ............MODE [26h.............TOGGLE PERIOD [164 ] = 0x00.....h.............PRED STEPh.............SCAN THRESHOLD [223 ] = 0x0004%0 % h.............FIELD FBKSTOP [34 ] = 155.00 %..........EXTERNALh.............FIELD FFRSTOP [35 ] = 20905.00 %..........RESET VALUE [584 ]h.............IFFB DELAY [36 ] = 20.......STAND..........QUENCH [585 ] = FAh.............II [154 ] = 0x5900..........AT SPEED LEVEL [586 ]h.............MIN BS DEAD TIME [101 ] = 1..........AT SPEED [587 ] = FALSECE TAh.............MAX BS DEAD TIME [553 ] = 20PUT [588 ] = 0.00 %h.............TOTAL I DMD [356 ] = 0.00 %9 ] = 0.00 %h.............PLL INT [277 ] = 325.00 SECSh.............FILTER T.C. [386 ] = 20 [401 ] = 0.000 SECSh.............ARM ENDSTOP [279 ] = 12500ITIVE LIMIT [405 ] = 100.00 % h.............SCAN TC [283 ] = 10.......NEGATIVE LIMIT [406 ] = -100.00h.............HF C/O DISC GAIN [280 ] = 1800a...........O/P SCALER(TRIM [407 ] = 0.2000h.............HF C/O FILTER TC [281 ] = 3.........INPUT 1 [410 ] = 0h.............BEMF THRESHOLD [282 ] = 42 [411 ] = 0.00 %h.............ANALOG IP OFFSETIO 1 [h.............CHANGEOVER BIAS [336 ] = 0x4780ULL MENUS [37a...........ENABLE [408h.............STANDBY FIELD [471 ] = 50.00 %...........INT. DEFEAT [409 ] = OFFh.............3-PHASE FIELD [476 ] = DISABLEDC. [403 ] = 0.100 SECS....SERIAL LINKSh.............ENABLE 12 PULSE [550 ] = 03 ] = 0.SRL LINK ENABLE [146 ] = ENABLEDh.............MASTER BRIDGE [551 ] = FALSE0h.............SLAVE BRIDGE [552 ] = FALSE ] = 0.0(UID [139 ] = 0 h.............NOT 570 STACK [522 ] = TRUE.....PROTOCOL [............STATICh.............OP STATION ERROR [158 ] = 0x00C0BAUD RATE [150............DYNAMIC COMPh.............SYSTEM IO [40 ] = 0x0304 SUP. (ASCII [152 ] = DI............REh.............POSITION COUNT [267 ] = 0x0000] = 10.....PARITY [334 ] = EVE h.............POSITION DIVIDER [275 ] = 1 PORT (P2........a........h.............RAW POS COUNT [387 ] = 0........GROUP ID (GIDa....h.............PLL ERROR [278 ] = 46........UNIT ID (UID [14h.............FILTER INPUT [295 ] = 0.00 %0000........PROTOCOL [149 ] = EI Ah.............FILTER OUTPUT [296 ] = 0.00 %..a...........LINE SPEED [424 ] = 0.00 %h.............R/L DELTA [372 ] = 0.00 %.........REEL SPEED [43h.............PNO 55 [531 ] = 0x0700 *3 ] = 50.0 SECS *h.............PNO 63 [532 ] = 0x0000..DIAMETER [42h.............PNO 71 [533 ] = 0x0002 *......MOD OF LINE SPD [428 ] = 0.00 h.............PNO 95 [534 ] = 0x0000............MOD OF REEL SPa.......PEEK 0.00 % IN..........PEEK DATA [123 ] = [0x0078] = A0A7............UNFILT DIAMETER [430 ] = 100.0 ..........PEEK SCALE [124 ] = 8.00a.........TAPER CALC.a.......miniLINK...........TAPERa.........VALUE 1 [339 ] = 0.00 %P ID (GID [329 ]a...........TENSIa.........VALUE 2 [340 ] =a.........SETPOINT SUM 2a.........VALUE 11 [382 ] = 0.00 % [445 ] = 0.00 %ER -> P3a.........VALUE 12 [383 ] = 0.00 % 1 [443 ] = 0.00 % [312 ] = a.........VALUE 13 [384 ] = 0.00 %UT 0 [444 ] = 0.00 %13 [3 a.........LOGIC 3 [348 ] = OFFa.........LOGIC 4 [349 ] = OFFa.........LOGIC 5 [350 ] = OFFa.........LOGIC 6 [351 ] = OFFa.........LOGIC 7 [352 ] = OFFa.........LOGIC 8 [353 ] = OFF......PARAMETER SAVE [354 ] = UP TO ACTION......CONFIGURE DRIVE........CONFIGURE ENABLE [39 ] =........NOM MOTOR VOLTS [521 ] = 440 VOLTS *........ARMATURE CURRENT [523 ] = 340.0 AMPS *........FIELD CURRENT [524 ] = 22.4 AMPS *h.......ZERO CAL INPUTS [543 ] = UP TO ACTION........FLD.CTRL MODE [209 ] = CURRENT CONTROL *........FLD.VOLTS RATIO [210 ] = 39.8 % *........MAIN CURR. LIMIT [421 ] = 120.00 % *........AUTOTUNE [18 ] = OFF........SPEED FBK SELECT [47 ] = ANALOG TACH *........ENCODER LINES [24 ] = 1500 *........ENCODER RPM [22 ] = 1000 RPM........ENCODER SIGN [49 ] = POSITIVE ........SPD.INT.TIME [13 ] = 0.641 SECS * ........SPD.PROP.GAIN [14 ] = 5.00 *。
ABB参数设置及修改(精)
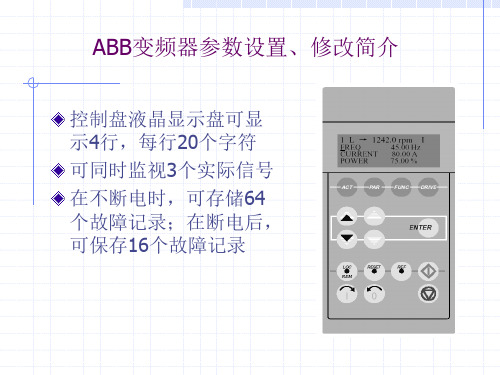
ABB变频器的调试步骤 (SCALAR)
注: 本文面向安装、调试、使用、维护传动单元的人员,读者应 具备电工学、电子学和识别电气原理图符号等基本知识。 本文针对ABB ACS800系列变频器,适用于一些特殊场合: -用于一台变频器同时驱动多台电机,且电机台数是可变的多电 机运行场合; -当电机的额定电流小于变频器额定输出电流的1/6时; -变频器输出端连接有接触器,且接触器在变频器运行时有可能 经常性断开的场合; -无电机连接,用于测试目的时。 通常情况下禁止现场调试人员随意改用SCALAR,只有请示本公司 工程设计部门主管同意后才可改用SCALAR。(选用SCALAR,控 制精度会降低,保护功能会减少)
慢调
选择参数,改变数值
选择参数,改变数值
设置给定值
显示故障
执行功能
ABB变频器的调试步骤(DTC)
本文面向安装、调试、使用、维护传动单元的人员, 读者应具备电工学、电子学和识别电气原理图符号等 基本知识。 本文针对ABB ACS800系列变频器,适用于大多数应用 场合,下列场合不适用DTC: -用于一台变频器同时驱动多台电机,且电机台数是 可变的多电机运行场合; -当电机的额定电流小于变频器额定输出电流的1/6时; -变频器输出端连接有接触器,且接触器在变频器运 行时有可能经常性断开的场合; -无电机连接,用于测试目的时。
调试步骤:
记录电机铭牌(电压、电流、功率、转速); 要求电机与负载、联轴器脱离; 检查电机,手动盘车,确认电机转动正常; 变频器上电; 如果将99.03设置YES,可还原参数; 设置电机参数(99.05、99.06、99.07、99.08、99.09); 设置参数99.04=DTC、99.10=STANDARD; 进行电机自辨识(大约2-3分钟); 根据图纸中变频器接线方式,选择设置99.02参数(推荐FACTORY); 通过控制盘启动电机,低速运行,同时要求相关人员在现场确定电机方 向; 设置其他参数; 将电机与负载和联轴器连接; 配合联调。
varyforsu渲染参数设置(精)

VFS (vr for sketchup参数设置1、亮光木材:漫射:贴图反射:35灰高光:0.8亚光木材:漫射:贴图反射:35灰高光:0.8 光泽(模糊):0.852、镜面不锈钢:漫射:黑色反射:255灰亚面不锈钢:漫射:黑色反射:200灰光泽(模糊):0.8拉丝不锈钢:漫射:黑色反射:衰减贴图(黑色部分贴图)光泽(模糊):0.83、陶器:漫射:白色反射:255 菲涅耳4、亚面石材:漫射:贴图反射:100灰高光:0.5 光泽(模糊):0.85 凹凸贴图5、抛光砖:漫射:平铺贴图反射:255 高光:0.8 光泽(模糊):0.98 菲涅耳普通地砖:漫射:平铺贴图缝隙0.2 反射:255 高光:0.8 光泽(模糊):0.9 菲涅耳6、木地板:漫射:平铺贴图缝隙0.01 反射:70 光泽(模糊):0.9 凹凸贴图7、清玻璃:漫射:255 反射:灰色/白色折射255 折射率1.5 【“菲涅耳”全开】(有色玻璃在“烟雾颜色”处调整颜色,并开启“影响阴影”,烟雾倍增调至0.6 )磨砂玻璃:漫射:灰色反射:255 高光:0.8 光泽(模糊):0.9 ,折射255 光泽(模糊):0.9 光折射率 1.58、普通布料: 漫射:贴图凹凸贴图 (根据实际情况加UVP 贴图)。
绒布: 漫射:衰减贴图置换贴图 (根据实际情况加UVP 贴图)。
地毯:1500X2000 VR置换模式 2D 贴图数量 50 把置换的贴图拉到材质球上,平铺4 X 4。
把地毯贴图赋予地毯。
9、皮革:漫射:贴图反射:50 高光:0.6 光泽(模糊):0.8 凹凸贴图 100 (UVP贴图)。
贴图:“漫射”去掉。
漫射:漫射可以更改颜色。
10、水材质 :漫射:黑色反射:255 衰减贴图菲涅耳折射:255 折射率:1.33 烟雾颜色:浅青色, 烟雾倍增:0.05左右 , 凹凸:20 贴图:澡波(350)11、纱窗:漫射:颜色/白色折射:灰白贴图折射率1 接收GI :2(调整贴图:输出—使用色彩贴图曲线---显示最终效果使物体变亮:选取物体右击--vr 属性--接受全局照明{调高一些GI :2},BRDF—沃德—影响阴影)整理过的vray 材质3墙体材质:漫射:246.246.246 折射/反射深度:2磨砂塑料:漫射:适宜色反射:30.30.30 高光光泽度:0.5 光泽度:0.86 细分:24塑钢窗:漫射:251.247.237 光泽度:0.8 深度:2 折射深度:2窗外背景(标准材质):漫射:贴图高光级别:10 光泽度:10金属拉丝柜门把手:漫射:白色反射:72.72.72 光泽度:0.5 细分:15 深度:2折射:101.101.101 细分:20 深度:27金属1漫射:默认反射:白色光泽度:0.5 细分:12 折射:默认细分:10金属2漫射:黑色反射:白色折射/反射细分:10 折射/反射深度:3 折射:默认细分:10白色柜门:漫射:251.247.237 反射/折射:默认光泽度:0.7 细分:12 深度:4灯泡自发光(Vr 材质包裹器):: ^; T; C5 n' V5 p产生全局照明2.0 基本材质---自发光颜色:75 高光级别/光泽度:10灯芯自发光(Vr 灯光材质):2.0 勾选双面灯罩玻璃:漫射:121.175.160 反射:默认细分:20 折射:180.180.180 细分:20盆栽材质:土壤(标准材质): Blinn---环境光/漫反射:土壤色植物(标准材质): Phong---环境光/漫反射:植物色高光级别/光泽度:50 盆(vr 材质):反射:白色光泽度:0.6 菲涅耳干支:漫射:67.38.14 63.44.4 折射/反射深度:2装饰花瓶:漫射:适宜色反射:默认光泽度:0.8 细分:50 菲涅耳折射细分20 折射率:木纹:漫射:贴图反射:18.18.18 光泽度:0.7 折射/反射深度:3镜面玻璃:漫射:默认反射:白色细分:12 折射:默认细分:50丝绸:漫射:falloff 并设置其颜色前深后浅垂直/平行反射:17.17.17 光泽度:17折射:falloff 并设置其颜色前深后浅垂直/平行凹凸通道:凹凸贴图值30 ( b7 d5 i, W! J8 `+ p地毯:漫射:falloff 并设置其颜色前:绒毛地毯贴图垂直/平行黑色塑料:漫射:黑色反射:20.20.20 光泽度:0.5 细分:6 折射细分50浴缸水:漫射:黑色反射:白色 falloff 细分:20 折射:白色 falloff 细分:20 折射率:1.2凹凸通道:凹凸值 5 noise 噪波类型:分形大小:350黑格线:漫射:黑色光泽度:0.7 折射/反射深度:21转椅(布面):漫射:falloff 并设置其颜色前深后浅垂直/平行凹凸通道:noise 噪波类型:规则大小:2转椅(皮面):漫射:皮革贴图反射:14.14.14 光泽度:0.65 折射/反射深度:3玻璃桌面:漫射:玻璃色反射:fallof---深绿/浅绿 fresnel 光泽度:0.98 细分:3 深度:3折射:细分:20 深度:3 烟雾颜色:淡绿烟雾倍增:0.1立柱石材:漫射:贴图反射:20.20.20 光泽度:0.9 细分:10 深度2 菲涅耳折射:20.20.20 光泽度:0.2 细分:10 深度2VFS (vr for sketchup参数设置1、亮光木材:漫射:贴图反射:35灰高光:0.8亚光木材:漫射:贴图反射:35灰高光:0.8 光泽(模糊):0.852、镜面不锈钢:漫射:黑色反射:255灰亚面不锈钢:漫射:黑色反射:200灰光泽(模糊):0.8拉丝不锈钢:漫射:黑色反射:衰减贴图(黑色部分贴图)光泽(模糊):0.83、陶器:漫射:白色反射:255 菲涅耳4、亚面石材:漫射:贴图反射:100灰高光:0.5 光泽(模糊):0.85 凹凸贴图5、抛光砖:漫射:平铺贴图反射:255 高光:0.8 光泽(模糊):0.98 菲涅耳普通地砖:漫射:平铺贴图缝隙0.2 反射:255 高光:0.8 光泽(模糊):0.9 菲涅耳6、木地板:漫射:平铺贴图缝隙0.01 反射:70 光泽(模糊):0.9 凹凸贴图7、清玻璃:漫射:255 反射:灰色/白色折射255 折射率1.5 【“菲涅耳”全开】(有色玻璃在“烟雾颜色”处调整颜色,并开启“影响阴影”,烟雾倍增调至0.6 )磨砂玻璃:漫射:灰色反射:255 高光:0.8 光泽(模糊):0.9折射255 光泽(模糊):0.9 光折射率 1.58、普通布料: 漫射:贴图凹凸贴图 (根据实际情况加UVP 贴图)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数控系统调试与维修
l、常见参数故障设置实验
2.与刀架有关的PMC参数设置试验
普通车床使用的四工位刀架能够正常工作,是菲PLC的控制完成的,在换刀过程中为了对刀架进行保护,设置了一个换刀超时时间,如果换刀过程在规定的时间内不能正常完成,系统就会提示报警。
为了能让刀架正确选择刀具,设置了一个刀架正转延时时间。
选择刀具后,要对所选择的刀具进行锁紧,我们在硼C参数中又设置了一个刀架反转延时时间常数,在系统PMC参数中,有关刀架的参数定义如下:
P2————换刀超时时间(系统设定为10S)
P3————刀具锁紧时间(系统设定为1S)
P4————正转延时时间(系统设定为0.1S)
我们可以根据上述参数定义,来对这些参数进行人为的修改,来认识这些参数的功能,具体做法如下:
(1)首先确认刀架电机运转正常。
换刀、锁紧等动作都准确无误;
(2)进入系统参数编辑状态,选择PMC系统参数,更改换刀锁紧时间、换刀超时时间、正转延时时间参数,·观察刀架换刀动作是否正常,并用手扳动动刀架,判断刀架是否锁紧,选者刀具悬否到位等。
然后把所观察到的现象添入下面表格中:
(3)测试完毕后将参数进行恢复到原来正常工作时的状态。
故障号:11
机床出现急停报警
故障设置:断开强电允许线,或断开某个行程开关点;或断开伺服轴伺服准备好信号等其中的使能信号 使用方法: 1、观察法
看机床操作面板及手持单元的急停按钮是否按下;
2、打开PLC 配置系统界面,观察强电允许点的状态是否正确,并观察超程限位各开关输入点状态是否正确,以判断是否有线断或线虚的地方。
或者可以利用万用表直接测量找出断点。
3、PLC 中规定的系统复位所需要完成的信息未满足要求。
如伺服动力电源准备好、主轴驱动准备好等信息。
若使用伺服,伺服动力电源是否未准备好:检查电源模块;检查电源模块接线;检查伺服动力电源空气开关。
X0 X0 X0 X0
24V
继电伺服允
故障号:11机床不能回参考点
故障设置方法:修改“回参考点”参数;调换某轴“+”“-”回零信号,或者去掉某轴某方向回零信号线;或断开与某轴回零信号相连的公共断信号。
故障号:12
将伺服驱动器的控制电源中的24V断开,运行Z轴,观察系统及驱动器的现象;
现象:系统报跟误差大
故障号13:
调换伺服放大器任两相像序。
修改伺服参数指令接受形式。
G8.11
分析:首先观察出现此报警后在手动运行模式下,系统发出指令,该轴工作台是否运行?以及指令运行方向与实际机床运行方向是否一致;若根本不运行则考虑伺服放大器等器件的问题如(3)(4),若运行且方向一致则应考虑(1)若运行且方向不一致则考虑(2)。
故障号:14
故障设置:将刀架正反转信号调换。
现象:刀架接到换刀指令后不动,接回原电路即可。
故障号:14
乱刀
故障设置:打开plc配置系统界面,打乱换刀霍耳元件输入信号的顺序或状态。