微机控制技术第四章部分习题答案
微机原理作业与答案第四章1
第四章汇编语言程序设计4-2下列程序执行后,寄存器AX BX CX的内容分别是多少?D SEGMENAT 0202H;定位数据段地址ORG 0202H ;定位偏移地址DA_WORD DW 20HMOV AX,DA_WORD ;(AX)=0020HMOV BX,OFFSET DA_WORD ;(BX)=0202HMOV CL,BYTE PTR DA_WORD ;(CL)=20H将变量DA_WOR的属性改变为字节型) MOVCH,TYPE DA_WORD ;(CH)=2( 变量类型数值);( CX)=0220H4-4试编制一程序,把CHAR中各小写字母分别转换为对应的大写字母,并存放在CHAR 开始的单元中(题目要求:不改变CHAR的内容)方法1,小写字母转换一个输出显示一个,前3种方法均使用了AL寄存器D SEGMENTCHAR1 DB "abcdefghijklmnopqrstuvwxyz"N EQU $-CHAR1 ; 变量必须先定义后使用,而不能相反CHAR2 DB N DUP(0);; 不能把此句与上一句对调,CHAR2 DB $-CHAR t ; 的同学这样写,错在哪?CHAR2DB$-CHAR1DUP(0) 是可以的D ENDSS SEGMENT STACKDB 200 DUP(0)S ENDSC SEGMENTASSUME CS:C,DS:D,SS:S ;ASSUM是伪指令,后面不能写冒号START: MOV AX,DMOV DS,AX;MOV ES,AX ; 只要用到串操作指令且DILEA SI,CHAR1 ;MOV SI,OFFSET CHAR1LEA DI,CHAR2 ; MOV DI,OFFSET CHAR2 MOV CXN, ;$-CHAR1, 不可以AGAIN:MOV AL,[SI]SUB AL,20H ; AND AL,5FH 有的同学是这样实现的MOV [DI],ALMOV DL,ALMOV AH,2INT 21H ; 从屏幕显示INC SIINC DILOOP AGAINMOV AH,4CHINT 21H ; ; 不是必须的C ENDSEND START方法2:使用通用数据传送指令MOVD SEGMENTCHAR1 DB ‘abcdefghijklmnopqrstuvwxyz 'N EQU $-CHAR1 ; 变量必须先定义后使用, 而不能相反CHAR2 DB N DUP(0); 不能把此句与上一句对调D ENDSSTACK SEGMENT STACKDB 200 DUP(0)STACK ENDS ;P126( 代码段和堆栈段是不可少的) C SEGMENTASSUME CS:C ,DS:D ,SS:SSTART: MOV AX,DMOV DS,AXMOV ES,AX ; 只要用到串操作指令且DIMOV SI,0 ;LEA SI,CHAR1MOV DI,0 ;LEA DI,CHAR2MOV CX,NAGAIN: MOV AL,CHAR1[SI] ; MOV AL,[SI] SUB AL,20HMOV CHAR2[DI],AL ; MOV [DI],ALINC SIINC DILOOP AGAINMOV AH,4CHINT 21H ; 不是必须的C ENDSEND START第3 种方法: 使用串的读写指令LODSB STOSB D SEGMENTCHAR1 DB ‘abcdef 'N EQU $-CHAR1CHAR2 DB $-CHAR1 DUP(0)D ENDSSTACK SEGMENT STACKDB 200 DUP(0)STACK ENDS ;P126( 代码段和堆栈段是不可少的) C SEGMENTASSUME CS:C,DS:D,SS:SSTART: MOV AX,DMOV DS,AXMOV ES,AXMOV SI,0 ;LEA SI,CHAR1MOV DI,0 ;LEA DI,CHAR2MOV CX,NCLD ; 不写( 隐含)也是0(递增)但不能STD AGAIN: LODSB ;执行一次, 隐含修改SISUB AL,32STOSB ;MOV [DI],AL ; 执行一次, 隐含修改DI INC DILOOP AGAIN ;LOOP指令只修改ex,不管SI,DIMOV AH,4CH iNT 21H ; 不是必须的e ENDsEND sTART 第四种方法2006级,没有显示使用MOVS指令D sEGMENTeHAR1 DB "abcdefghijklmnopqrstuvwxyz"N EQU $-eHAR1 eHAR2 DB N DUP(0) D ENDSS SEGMENT STAeK DB 200 DUP(0)S ENDS e SEGMENTASSUME eS:e,DS:D,SS:SSTART:MOV Ax,DMOV DS,AxMOV ES,AxLEA Si,eHAR1LEA Di,eHAR2MOV ex,NAGAiN:MOVSB ; SUB [Si],20HDEe Di ; MOVSBSUB BYTEPTR[Di],20H ;LOOP AGAiN 错在哪里?结果如何?iNeDiLOOP AGAiNMOV AH,4eH iNT 21H e ENDSEND START 方法5: 只用一个地址指针SiD SEGMENTeHAR1 DB "abcdefghijklmnopqrstuvwxyz"N EQU $-eHAR1 eHAR2 DB N DUP(0) D ENDSS SEGMENT STAeKDB 200 DUP(0)S ENDS e SEGMENTASSUME CS:C,DS:D,SS:SSTART:MOV AX,DMOV DS,AXMOV ES,AXMOV SI,0MOV CX,NAGAINMOV AL,CHAR1[SI];只用一个地址指针,SI[CHAR1]是错误的SUB AL,20HMOV CHAR2[SI],ALINC SILOOP AGAINint 3MOV AH,4CHINT 21HC ENDSEND START有的同学按数据是由键盘录入的来考虑的,也可行,程序中还有不少问题方法6:由键盘输入小写字母再转换输出, 回车符也占一个字节,输入需要小写转换成大写字母的内容从输入串的第3 个元素开始D SEGMENTA DB"CHAR1",0DH,0AH,"$"B DB"CHAR2",0DH,0AH,"$"CHAR1 DB 11,?,11 DUP(0); 准备输入1 0个小写字母CHAR2 DB 10 DUP(0)D ENDSS SEGMENT STACKDB 200 DUP(0)S ENDSC SEGMENTASSUME CS:C,DS:D,SS:SSTART:MOV AX,DMOV DS,AXMOV ES,AXMOV DX,OFFSET AMOV AH,9INT 21HLEA DX,CHAR1MOV AH,0AHINT 21H ; 由键盘输入字符串,1 0个字母(显示) , 1 个回车,共11 个字节LEA SI,CHAR1[2]LEA DI,CHAR2MOV CX,10 ; 需要转换的字符长度为10 个字节AGAIN:MOV AL,[SI]SUB AL,20HMOV [DI],ALINC SIINC DILOOP AGAIN ; 将小写字母字符串转换成大写字母字符串MOV BYTE PTR[DI],0DHINC DIMOV BYTE PTR[DI],0AHINC DIMOV BYTE PTR[DI],'$' ; 必须指明数据类型MOV DX,OFFSET CHAR2MOV AH,9INT 21H ; 输出'$' 结尾的大写字母字符串int 3MOV AH,4CHINT 21HC ENDS END START4-6在BUF地址处起,存放有100个字节的字符串,设其中有一个以上的“ A字符,编程查找出第一个“ A”字符相对起始地址的距离,并将其存入LEN单元。
微机控制技术复习题(部分参考答案)
微机控制技术复习题(部分参考答案)一、填空题:1、8位D/A 转换器的分辩率是满刻度值/2^8 。
2、数字调节器与模拟调节器相比更能实现复杂控制规律。
3、计算机具有分时控制能力,可实现多回路控制。
4、为了实现最少拍有波纹控制,闭环脉冲传递函数)(Z Φ中应包含)(Z G 的所有单位圆上和单位圆外零点,为了实现最少拍无波纹控制,闭环脉冲传递函数)(Z Φ中应包含)(Z G 的所有零点。
5、按最少拍原则设计的系统是时间最优系统。
6、最少拍无波纹与最少拍有波纹系统相比其闭环脉冲传递函数)(Z Φ中1-Z的阶次要高一些,调整时间要长一些。
7、大林把这种控制量以1/2 的采样频率振荡的现象称为“ 振铃”。
8、分析结果表明:)(Z U 与)(Z R 间的脉冲传递函数表达式中,包含有Z 平面单位圆内接近-1 的负实数极点,则会产生振铃现象。
9、如果按大林提出的简单修正算法来防止振铃现象,则对系统的稳态输出无影响,但对系统的动态性能有影响。
10、数字控制器的模拟化设计法是在采样周期必须足够小,除必须满足采样定例外采样周期的变化对系统性能影响不大的条件下使用的。
11、数字量输出保持一般有两种方案,一种是输出通路设置一个D/A 转换器的结构形式(数字量保持方案),一种是多个输出通路公用一个D/A 转换器的结构式(模拟量保持方案),前者与后者相比D/A 转换器使用数量多。
12、常用的A/D 转换器有计数器式,双积分式,逐次逼近式。
13、为了消除稳态误差,)(Z e Φ的表达式中须含有因式(1-z^-1)^q 。
补充填空题:1、常用的I/O 控制方式是程序控制方式,中断控制方式,直接存储器存取方式。
2、微型计算机控制系统中解决中断优先级的办法是软件查询方式,雏菊链法,专用硬件方式。
3、满足实时控制要求的使用条件是所有外围设备的服务时间的总和必须小于或等于任意外围设备的最短响应时间。
4、最短响应时间是某台设备相应两次请求服务的最短间隔时间。
微型计算机控制技术课后习题答案

第一章计算机控制系统概述习题及参考答案1.计算机控制系统的控制过程是怎样的计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进展检测,并输入给计算机。
(2)实时控制决策:对采集到的表征被控参数的状态量进展分析,并按已定的控制规律,决定下一步的控制过程。
(3)实时控制输出:根据决策,适时地对执行机构发出控制信号,完成控制任务。
2.实时、在线方式和离线方式的含义是什么?(1)实时:所谓“实时〞,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进展处理,并在一定的时间内作出反响并进展控制,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线〞方式:在计算机控制系统中,如果生产过程设备直接及计算机连接,生产过程直承受计算机的控制,就叫做“联机〞方式或“在线〞方式。
(3)“离线〞方式:假设生产过程设备不直接及计算机相连接,其工作不直承受计算机的控制,而是通过中间记录介质,靠人进展联系并作相应操作的方式,那么叫做“脱机〞方式或“离线〞方式。
3.微型计算机控制系统的硬件由哪几局部组成?各局部的作用是什么?由四局部组成。
(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个局部发出各种命令,同时对被控对象的被控参数进展实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进展各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进展监视,使之处于最优工作状态;对事故进展预测和报警;编制生产技术报告,打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进展信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进展控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
(3)外部设备:这是实现微机和外界进展信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器(磁盘)。
微型计算机控制技术课后习题答案
第一章计算机控制系统概述习题及参考答案1.计算机控制系统的控制过程是怎样的?计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进行检测,并输入给计算机。
(2)实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程。
(3)实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务。
2.实时、在线方式和离线方式的含义是什么?(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进行处理,并在一定的时间内作出反应并进行控制,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:在计算机控制系统中,如果生产过程设备直接与计算机连接,生产过程直接受计算机的控制,就叫做“联机”方式或“在线”方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制,而是通过中间记录介质,靠人进行联系并作相应操作的方式,则叫做“脱机”方式或“离线”方式。
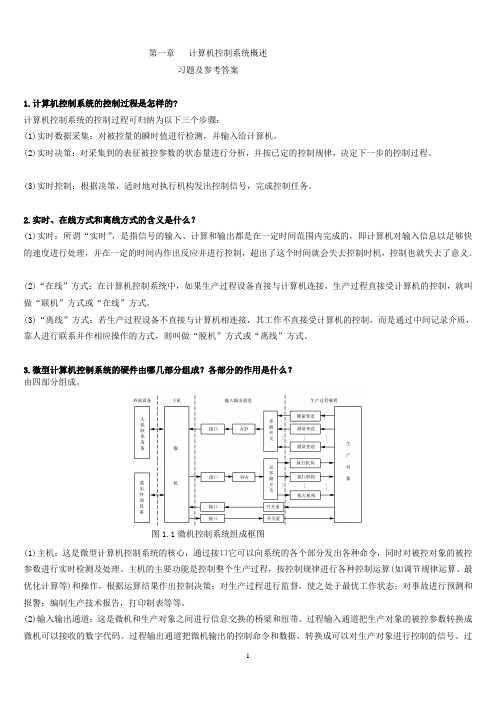
3.微型计算机控制系统的硬件由哪几部分组成?各部分的作用是什么?由四部分组成。
图1.1微机控制系统组成框图(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
微机原理 第4章作业答案

第3章指令系统3.9 设段寄存器DS=1000H,SS=2000H,ES=3000H,通用寄存器BX=4000H,BP=5000H,SI=6000H,DI=7000H。
在下列各指令中指出存储器操作数的寻址方式,求出有效地址EA、物理地址PA,并分别用物理地址和逻辑地址说明指令执行结果。
(1)MOV CX, [2300H]直接寻址EA=2300HPA=DS*16+EA=1000H*16+2300H=12300H 执行结果:(12300H)→CL,(12301H)→CH (2)MOV BYTE PTR [BX], 8FH寄存器间接寻址EA=BX=4000HPA=DS*16+EA=1000H*16+4000H=14000H 执行结果:8FH→(14000H)(3)MOV DH, [BP+3000H]基址寻址EA=BP+3000H=8000HPA=SS*16+EA=2000H*16+8000H=28000H 执行结果:(28000H)→DH(4)MOV ES: [SI+1210H], AX变址寻址EA=SI+1210H=7210HPA=ES*16+EA=3000H*16+7210H=37210H 执行结果:AL→(37210H),AH→(37211H) (5)MOV [BX+DI+50H], AL基址变址位移寻址EA=BX+DI+50H=0B050HPA=DS*16+EA=1000H*16+0B050H=1B050 H执行结果:AL→(1B050H)(6)INC WORD PTR [BX+SI]基址变址寻址EA=BX+SI=0A000HPA=DS*16+EA=1000H*16+0A000H=1A000 H执行结果:(1A000H)中存放的字的值加13.11 指出下列指令中源操作数的寻址方式。
(1)MOV BL, 0F9H 立即寻址(2)ADD [BX], SI 寄存器寻址(3)SUB CL, [4000H] 直接寻址(4)CMP DX, [SI] 寄存器间接寻址(5)AND SL, [BX+1] 基址寻址(6)OR BP, [DI+2100H] 变址寻址(7)XOR AX, [BP+SI] 基址变址寻址(8)MOV CX, 300 立即寻址3.12 下列指令都是非法的,指出各指令错在哪里?(1)MOV SI, AH两个操作数字长不一致(2)MOV 70H, BL立即数不能做目的操作数(3)MOV CX, F123H十六进制的数以字母打头必须在前面补0 (4)MOV [BX], 6AH两个操作数的字长不确定(5)MOV ES, 5000H立即数不能直接送段寄存器(6)MOV [DI], [3000H]两个操作数不能同为内存操作数(7)MOV DS, SS两个操作数不能同为段寄存器(8)MOV CS, AX不能对CS赋值(9)MOV AL, [CX]寄存器间接寻址中不能使用CX(10)MOV [BX+BP], DX存储器寻址方式中表示有效地址不能同为两个基址寄存器(11)MOV BH, [SI+DI+2]存储器寻址方式中表示有效地址不能同为两个变址寄存器(12)PUSH AL入栈出栈操作必须以字为单位(13)LEA AX, BXLEA指令中源操作数必须为存储器寻址方式(14)LDS BL, [5100H]LDS指令中目的操作数必须为16位的通用寄存器(15)IN AH, DXIN指令中目的操作数必须为AL或AX (16)OUT 288H, AL输入输出指令中端口地址为16位,必须先送给DX(17)ADD [2400H], 1234H两个操作数的字长不确定(18)XOR [2500H], [BX+10H]两个操作数不能同为内存操作数(19)INC [SI]操作数的字长不确定(20)MUL 10MUL指令的操作数不能为立即数(21)IDIV [BP+DI+1300H]操作数的字长不确定(22)SAL AL, 2移位次数大于1必须先送给CL3.14 设SP=2000H,AX=3000H,BX=5000H,执行以下3条指令后,问SP=?AX=?BX=? PUSH AX ;SP减2,栈顶元素为3000HPUSH BX ;SP减2,栈顶元素为5000HPOP AX ;SP加2,将栈顶元素5000H弹出至AX结果:SP=1FFEH,AX=5000H,BX=5000H3.16 下列程序执行完后,AX=?BX=?CX=? MOV AX, 1122HMOV BX, 3344HPUSH AX ;栈顶元素为1122H POP CX ;将栈顶元素1122H 弹出至CXXCHG BX, CX ;BX=1122H,CX=3344HLEA CX, [BX] ;CX=BX=1122H结果:AX=1122H,BX=1122H,CX=1122H3.17 CPU分别执行下列各程序段后,写出各个执行结果的状态标志位OF、SF、ZF、AF、PF、CF的值。
微型计算机技术及应用(第四版)习题解答
微型计算机技术及应用(第四版)习题解答微型计算机技术及应用习题解答第一章微型计算机概述1.1微处理器、微型计算机和微型计算机系统三者之间有什么不同?答:①微处理器是微型计算机的核心,是微型计算机的一部分。
它是集成在一块芯片上的CPU,由运算器和控制器组成。
②微型计算机包括微处理器、存储器、I/O接口和系统总线,是微型计算机系统的主体。
③微型计算机系统包括微型计算机、外设及系统软件三部分。
1.2累加器和其他通用寄存器相比,有何不同?答:许多指令的执行过程以累加器为中心;输入/输出指令一般也以累加器来完成1.3 16位微机和32位微机的内存容量最大时分别是多少?16位有20条地址总线,所以是2的20次方1MB 如8086和8088 有的16位是24条地址总线是2的24次方16MB如80286 32位的是2的32方吃方是4GB附带64位的是2的36次方第二章8086微处理器2.1段寄存器CS=1200H,指令指针寄存器IP=FF00H,此时,指令的物理地址为多少?指向这一物理地址的CS值和IP值是唯一的吗?答:1.该指令的物理地址=CS×10H+IP=21F00H。
2.指向这一物理地址的CS值和IP值不是唯一的。
2.2状态标志和控制标志有何不同?程序中是怎样利用这两类标志的?8086的状态标志和控制标志分别有哪些?答:1.不同之处在于:状态标志由前面指令执行操作的结果对状态标志产生影响,即前面指令执行操作的结果决定状态标志的值。
控制标志是人为设置的。
2.利用状态标志可进行计算和判断等操作。
利用控制标志可对某一种特定功能(如单步操作、可屏蔽中断、串操作指令运行的方向)起控制作用。
3.8086的状态标志有:SF、ZF、PF、CF、AF和OF计6个。
8086的控制标志有:DF、IF、TF计3个。
2.3总线周期的含义是什么?8086/8088的基本总线周期由几个时钟组成?如一个CPU的时钟频率为24MHz,那么,它的一个时钟周期为多少?一个基本总线周期为多少?如主频为15MHz呢?(后2问课本上没有)答:1.总线周期的含义是总线接口部件完成一个取指令或传送数据的完整操作所需的最少时钟周期数。
04级微机系统第四章综合练习题(参考答案)

微机系统第三章综合练习题专业班级学号姓名一.选择题1.下列4种描述中正确的是()。
A.汇编语言只由指令语句构成。
B.汇编语言语句包括指令语句和伪指令语句和宏指令语句。
C.指令语句和伪指令语句都能经汇编程序翻译成机器代码。
D.指令语句和伪指令语句都不能经汇编程序翻译成机器代码。
2.下列不合法的标识符是()。
A.RABC B.2A7tB C.?A2SB D._Wl'43.指定起始地址偏移量的伪指令是()。
A.PARA B.ORG C.SEGMENT D.PROC4.伪指令VAR DW ? 将在内存预留的存储空间是()。
A.1字节 B.2字节 C.6字节 D.4字节5.伪指令BUF DB 20 DUP(0,1) 在内存中占用的存储空间是()。
A.80字节 B.20字节 C.60字节 D.40字节6.伪指令VAR DT ?将在内存预留的存储空间是()。
A.2字节 B.4字节 C.10字节 D.16字节7.阅读下列程序段,说明程序段执行后AX寄存器的内容是()。
┆TAB DW 1,2,3,4,5,6 ;定义1~6为字数据ENTRY EQU 3 ;定义ENTRY=3┆MOV BX,OFFSET TAB ;将TAB的偏移地址送BXADD BX,ENTRY ;BX←BX+3MOV AX,WORD PTR [BX] ;将BX对应2个单元数据送AX┆A.0403H B.0300H C.0506H D. 0003H8.已知VAR DW l,2,$+2,5,6,若汇编时VAR分配的偏移地址是0010H,汇编后0014H单元的内容是()。
A.16H B.05H C.14H D.06H解:符号$用在伪操作的参数字段时,表示地址计数器的当前值。
若汇编时VAR分配的偏移地址是0010H,且定义的是字数据,第1个字“1”即0001H,存放的存储单元的偏移地址是0010H和0011H,占两个存储单元;第2个字存放0002H,占用两个存储单元,其偏移地址是0012H和0013H,到第3个字时,$的值应该是VAR的偏移地址加上4个单元,即0014H,所以这时第3个字的值 $+2=0014+2=0016H,则汇编后的存储区如图题4-2所示。
于海生---微型计算机控制技术课后习题答案

第一章计算机控制系统概述习题及参考答案1.计算机控制系统的控制过程是怎样的计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进行检测,并输入给计算机。
(2)实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程。
!(3)实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务。
2.实时、在线方式和离线方式的含义是什么(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进行处理,并在一定的时间内作出反应并进行控制,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:在计算机控制系统中,如果生产过程设备直接与计算机连接,生产过程直接受计算机的控制,就叫做“联机”方式或“在线”方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制,而是通过中间记录介质,靠人进行联系并作相应操作的方式,则叫做“脱机”方式或“离线”方式。
3.微型计算机控制系统的硬件由哪几部分组成各部分的作用是什么—由四部分组成。
图微机控制系统组成框图(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9、已知被控对象的传递函数为)
11.0(10)(+=s s s G c 采样周期s T 1=,采用零阶保持器。
要求:
(1)针对单位速度输入信号设计最少拍无纹波系统的D(z),并计算输出响应)(k y 、控
制信号)(k u 和误差)(k e 序列,画出它们对时间变化的波形。
(2)针对单位阶跃输入信号设计最少拍有纹波系统)(z D ,并计算)(k y 、)(k u 、)(k e
序列,画出它们对时间变化的波形。
【解】(1)首先求取广义对象的脉冲传递函数
)
1)(1()111.01(9)1111)1(10)(1(101110)1()11.0(10)1()11.0(11)(110111110121112121----------------+=-+----=⎥⎦⎤⎢⎣⎡++--=⎥⎦⎤⎢⎣⎡+-=⎥⎦⎤⎢⎣⎡+•-=z e z z z z e z z z z s s s Z z s s Z z s s
e Z z G Ts
由)(z G 的表达式和)(s G c 知,满足无纹波设计的必要条件,
且q j j w v q d ≤=====且,1,1,1,2,0
故有2
1=+-==+=q j v n d w m 对单位速度输入信号,选择
)1()1()()1()1()(1)(111211111----=-+-=-⎥⎦
⎤⎢⎣⎡-=Φ-=Φ∏z f z z F z z a z z q j v i i e
))(111.01()()1()(2221211211---=--++=⎥⎦⎤⎢⎣⎡-=Φ∏z f z f z z F z b z z w i i d
)1()1())(111.01(1)(1111212221211-----+-=++-=Φ-z f z z f z f z z
即:⎪⎩⎪⎨⎧-=+-=--=-22112122112111111.0)111.0(212f f f f f f f ,故有⎪⎩⎪⎨⎧-===990.0890.1110.022
2111f f f
)111.01()1()(121--+-=Φz z z e
)990.0890.1)(111.01()(211----+=Φz z z z
)
111.01()1()990.0890.1)(105.41(111.0)
111.01()1()990.0890.1)(111.01()
1)(1()111.01(91)(1)()(1)(121115121211110111---------------+--⨯-=+--+•--+=Φ-Φ•=z z z z z z z z z z e z z z z z z G z D ++++=-+-=Φ=---------5432211211
54389.1)990.0890.1)(111.01()
1()()()(z z z z z z z z Tz z z R z Y +•++=+--=Φ=-------321121211
0111.0)111.01()1()
1()()()(z z z z z z Tz z z R z E e +++=--⨯-=Φ==--------321121151.01.021.0)
1()99.089.1)(105.41(111.0)()()()()()(z z z z z z z z G z z R z G z Y z U
(2))(z G 同(1)题
对单位阶跃输入信号,由)(z G 的表达式和)(s G c 知,满足有纹波设计的必要条件,
且q j j u v q d ≤=====且,1,0,1,1,0
故有1
0=+-==+=q j v n d u m 对单位阶跃输入信号,选择
)1()()1()1()(1)(11111---=--=-⎥⎦
⎤⎢⎣⎡-=Φ-=Φ∏z z F z z a z z q j v i i e
121211)()1()(-=--=⎥⎦⎤⎢⎣⎡-=Φ∏z f z F z b z z u i i d
)1(1)(11121---=-=Φ-z z f z
故有121=f
)1()(1--=Φz z e
1)(-=Φz z
)
111.01(9)105.41()1()
1)(1()111.01(91)(1)()(1)(11511110111----------+⨯-=-•--+=Φ-Φ•=z z z z z e z z z z z z G z D
+++=-=Φ=-=---32111
1)()()(z z z z
z z z R z Y +•+•==--=Φ=---1011011)1()
1(1)()()(z z z z z z R z E e ++-=+⨯-=Φ==-----2111
50014.00124.0111.0)
111.01(9105.41)()()()()()(z z z z z G z z R z G z Y z U
10、被控对象的传递函数为21)(s
s G c = 采样周期s T 1=,采用零阶保持器,针对单位速度输入函数,按以下要求设计:
(1)用最少拍无纹波系统的设计方法,设计)(z Φ和)(z D ;
(2)求出数字控制器输出序列)(k u 的递推形式;
(3)画出采样瞬间数字控制器的输出和系统的输出曲线。
【解】:首先求取广义对象的脉冲传递函数
2111312)1(2)1(1)1(11)(------+=⎥⎦⎤⎢⎣⎡-=⎥⎦
⎤⎢⎣⎡•-=z z z s Z z s s e Z z G Ts 由)(z G 的表达式和)(s G c 知,满足无纹波设计的必要条件,
且q j j w v q d ≤=====且,2,1,2,2,0
故有2
1=+-==+=q j v n d w m 对单位速度输入信号,选择
)1()1()()1()1()(1)(111211111----=-+-=-⎥⎦
⎤⎢⎣⎡-=Φ-=Φ∏z f z z F z z a z z q j v i i e
))(1()()1()(2221211211---=--++=⎥⎦⎤⎢⎣⎡-=Φ∏z f z f z z F z b z z w i i d
)1()1())(1(1)(1111212221211-----+-=++-=Φ-z f z z f z f z z
即:⎪⎩⎪⎨⎧-=+-=--=-22112122112111)(212f f f f f f f ,故有⎪⎩⎪⎨⎧-===75.025.175.022
2111f f f
)75.01()1()(121--+-=Φz z z e
)75.025.1)(1()(211----+=Φz z z z
)
75.01()75.025.1(2)75.01()1()75.025.1)(1()1(2)1(1)(1)()(1)(111212112
111----------+-=+--+•-+=Φ-Φ•=z z z z z z z z z z z z z G z D ++++=-+-=Φ=---------5432211211
54325.1)75.025.1)(1()
1()()()(z z z z z z z z Tz z z R z Y 215.15.2)
()()()()()(---=Φ==
z z z G z z R z G z Y z U 图。