微机控制技术第三章、第四章练习题答案
微机原理及接口技术课后习题及参考答案

第一章课后习题1.1 把下列十进制数转换成二进制数、八进制数、十六进制数。
① 16.25 ② 35.75 ③ 123.875 ④ 97/1281.2 把下列二进制数转换成十进制数。
① 10101.01 ② 11001.0011 ③ 111.01 ④ 1010.11.3 把下列八进制数转换成十进制数和二进制数。
① 756.07 ② 63.73 ③ 35.6 ④ 323.451.4 把下列十六进制数转换成十进制数。
① A7.8 ② 9AD.BD ③ B7C.8D ④ 1EC1.5 求下列带符号十进制数的8位补码。
① +127 ② -1 ③ -0 ④ -1281.6 求下列带符号十进制数的16位补码。
① +355 ② -11.7 计算机分那几类?各有什么特点?1.8 简述微处理器、微计算机及微计算机系统三个术语的内涵。
1.9 80X86微处理器有几代?各代的名称是什么?1.10 你知道现在的微型机可以配备哪些外部设备?1.11 微型机的运算速度与CPU的工作频率有关吗?1.12 字长与计算机的什么性能有关?习题一参考答案1.1 ① 16.25D=10000.01B=20.2Q=10.4H② 35.75D=100011.11B=43.6Q=23.CH③ 123.875D=1111011.111B=173.7Q=7B.EH④ 97/128D=64/123+32/128+1/128=0.1100001B=0.604Q=0.C2H1.2 ① 10101.01B=21.25D ② 11001.0011B=25.1875D③ 111.01B=7.25D ④ 1010.1B=10.5D1.3 ① 756.07Q=111101110.000111B=494.109D ②63.73Q=110011.111011B=51.922D③ 35.6Q=11101.110B=29.75D ④323.45Q=11010011.100101B=211.578D1.4 ① A7.8H=167.5D ② 9AD.BDH=2477.738D③ B7C.8D=2940.551D ④ 1ECH=492D1.5 ① [+127]补=01111111 ② [-1]补= 11111111③ [-0]补=00000000 ④[-128]补=100000001.6 ① [+355]补= 0000000101100011 ② [-1]补= 1111 1111 1111 11111.7 答:传统上分为三类:大型主机、小型机、微型机。
第三章微机原理习题答案
第三章习题答案一、 单选题1. 8086是高性能的第三代微处理器,是Intel 系列的系列的 B 位微处理器。
位微处理器。
A .8 B .16 C .32D .64 2. 8086有20根地址线,可以寻址到的内存空间能达到根地址线,可以寻址到的内存空间能达到 B 字节。
字节。
A .1KB .1MC .1GD .1T 3. 80486的内部所有部件都连接在的内部所有部件都连接在 A 上,并通过上,并通过 B 交换数据交换数据A .内部总线.内部总线B .数据总线.数据总线C .地址总线.地址总线D .外部总线.外部总线4. C 的任务就是在内部控制总线信号的控制下,把内部数据总线上的数据送上外部地址总线,或与外部数据总线的某些位交换数据,并产生相应的外部控制信号。
址总线,或与外部数据总线的某些位交换数据,并产生相应的外部控制信号。
A .高速缓存部件.高速缓存部件B .代码预取部件.代码预取部件C .总线接口部件.总线接口部件D .指令译码部件.指令译码部件5. 在指令流水线技术中,预取指令部件一次可以从内部Cache 取 C 字节的指令代码,送预取指令队列等候执行。
送预取指令队列等候执行。
A .4B .8C .16D .32 6. 当存储器的读出时间大于CPU 要求的时间时,为了保证CPU 与存储器的周期配合,就要利用一个READY 信号,使CPU 插入一个插入一个 D 状态。
状态。
A .T 1 B .T 2 C .T 3D .T w 7. 指令队列的作用是指令队列的作用是D 。
A .暂存操作数地址.暂存操作数地址 B .暂存操作数.暂存操作数C .暂存指令地址.暂存指令地址D .暂存预取指令.暂存预取指令8. 在80486微处理器中设置有4个系统地址寄存器,用来在保护方式下管理4个系统表。
其中用来存放全局描述符表的是中用来存放全局描述符表的是A 。
A .全局描述符表寄存器.全局描述符表寄存器B .中断描述符表寄存器.中断描述符表寄存器C .局部描述符表寄存器.局部描述符表寄存器D .任务状态寄存器.任务状态寄存器9. 段寄存器和段寄存器和 D 一起为操作系统完成内存管理、一起为操作系统完成内存管理、多任务环境、多任务环境、多任务环境、任务保护提供硬件支持。
微型计算机控制技术课后习题答案

第一章计算机控制系统概述习题及参考答案1.计算机控制系统的控制过程是怎样的计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进展检测,并输入给计算机。
(2)实时控制决策:对采集到的表征被控参数的状态量进展分析,并按已定的控制规律,决定下一步的控制过程。
(3)实时控制输出:根据决策,适时地对执行机构发出控制信号,完成控制任务。
2.实时、在线方式和离线方式的含义是什么?(1)实时:所谓“实时〞,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进展处理,并在一定的时间内作出反响并进展控制,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线〞方式:在计算机控制系统中,如果生产过程设备直接及计算机连接,生产过程直承受计算机的控制,就叫做“联机〞方式或“在线〞方式。
(3)“离线〞方式:假设生产过程设备不直接及计算机相连接,其工作不直承受计算机的控制,而是通过中间记录介质,靠人进展联系并作相应操作的方式,那么叫做“脱机〞方式或“离线〞方式。
3.微型计算机控制系统的硬件由哪几局部组成?各局部的作用是什么?由四局部组成。
(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个局部发出各种命令,同时对被控对象的被控参数进展实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进展各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进展监视,使之处于最优工作状态;对事故进展预测和报警;编制生产技术报告,打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进展信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进展控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
(3)外部设备:这是实现微机和外界进展信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器(磁盘)。
微型计算机控制技术课后习题答案
第一章计算机控制系统概述习题及参考答案1.计算机控制系统的控制过程是怎样的?计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进行检测,并输入给计算机。
(2)实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程。
(3)实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务。
2.实时、在线方式和离线方式的含义是什么?(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进行处理,并在一定的时间内作出反应并进行控制,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:在计算机控制系统中,如果生产过程设备直接与计算机连接,生产过程直接受计算机的控制,就叫做“联机”方式或“在线”方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制,而是通过中间记录介质,靠人进行联系并作相应操作的方式,则叫做“脱机”方式或“离线”方式。
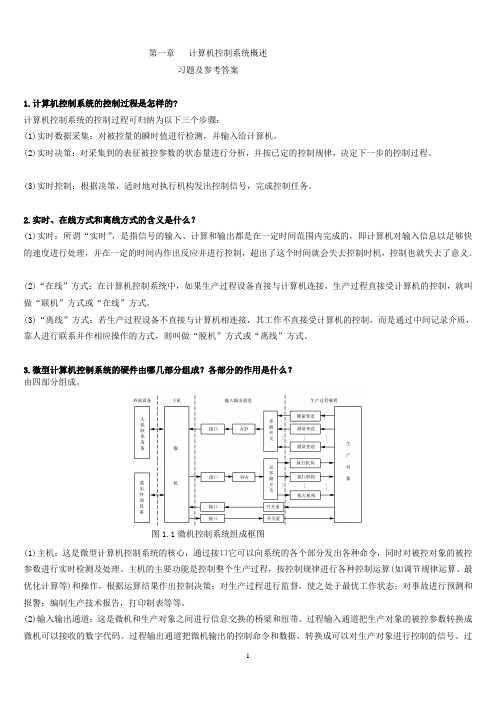
3.微型计算机控制系统的硬件由哪几部分组成?各部分的作用是什么?由四部分组成。
图1.1微机控制系统组成框图(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
(完整word版)微机习题答案
(完整word版)微机习题答案微机原理与接口技术试题库第一章基础知识一、填空1、计算机中采用二进制数,尾符用B 表示。
2、西文字符的编码是ASCII 码,用 1 个字节表示。
3、10111B用十六进制数表示为H,八进制数表示为O。
4、带符号的二进制数称为真值;如果把其符号位也数字化,称为原码。
5、已知一组二进制数为-1011B,其反码为10100B ,其补码为10101B 。
6、二进制码最小单位是位,基本单位是字节。
7、一个字节由8 位二进制数构成,一个字节简记为1B ,一个字节可以表示256 个信息。
8、用二进制数表示的十进制编码,简称为BCD 码。
9、8421码是一种有权BCD 码,余3码是一种无权BCD 码。
二、选择1、计算机中采用 A 进制数。
A. 2B. 8C. 16D. 102、以下的 C 编码是一种有权码。
A. 循环码B. BCD码C. 8421码D. 余3码3、八进制数的尾符是 B 。
A. BC. DD. H4、与十进制数254等值的数是 A 。
A. 11111110B. 11101111C. 11111011D. 111011105、下列不同数制表示的数中,数值最大的是 C 。
A. 11011101BB. 334OC. 1219DD. DAH6、与十六进制数BC等值的数是B 。
A. 10111011B. 10111100C. 11001100D. 110010117、下列字符中,ASCII码值最小的是 A 。
A. KB. YC. aD. i8、最大的10位无符号二进制整数转换成十进制数是C 。
A. 51B. 512C. 1023D. 10249、A的ASCII码值为65D,ASCII码值为68D的字母是C 。
A. BC. DD. E10、下列等式中,正确的是 D 。
A. 1KB=1024×1024BB. 1MB=1024BC. 1KB=1024D. 1MB=1024×1024B第二章微型机系统概述一、填空1、计算机的发展经历了4 时代,微型机属于第4 代计算机。
《微机原理与接口技术》(第四版)周何琴课后习题答案

第1章绪论作业1. 将下列二进制数转换成十进制数。
(1)11001010B=202 (2)00111101B=61(3)01001101B=77 (4)10100100B=1643. 将下列十进制数分别转换为二进制数和十六进制数。
(2)76= 100 1100B =4CH(4)134= 1000 0110B =86H4. 求下列十进制数的BCD码(1)327=11 0010 0111(BCD码)(2)1256=1 0010 0101 0110(BCD码)6. 求出下列10进制数的原码、反码和补码(2)+85 (4)-85解:85=0101 0101B原码:+85= 0101 0101B -85= 1101 0101B反码:+85= 0101 0101B -85= 1010 1010B补码:+85= 0101 0101B -85= 1010 1011B10. 画出微型计算机的基本结构框图,说明各部分的主要功能是什么?解:微型计算机的基本结构框图如下:微处理器CPU:控制微处理器与存储器或I/O设备间的数据交换;进行算术和逻辑运算等操作;判定和控制程序流向。
微处理器主要完成:(1)指令控制:从存储器中取指令,指令译码;(2)数据加工:简单的算术逻辑运算;(3)操作控制:在微处理器和存储器或者I/O之间传送数据;(4)时间控制:程序流向控制。
存储器:用来存放数据和指令。
I/O接口:主机和外设间的桥梁,提供数据缓冲驱动、信号电平转换、信息转换、地址译码、定时控制等各种功能。
I/O设备:输入原始数据和程序,转换成计算机能识别的信息,送入存储器去等待处理。
输出运算结果。
总线:连接计算机系统中各功能部件的信息通道。
第2章 8086CPU作业2. 8086CPU内部由哪两部分组成?它们的大致是如何工作的?答:(1)8086CPU由指令执行部件EU和总线接口部件BIU两部分组成。
(2)① BIU先执行读存储器操作,从给定地址单元中取出指令,送到先进先出的指令队列中等待执行。
于海生---微型计算机控制技术课后习题答案

第一章计算机控制系统概述习题及参考答案1.计算机控制系统的控制过程是怎样的计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进行检测,并输入给计算机。
(2)实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程。
!(3)实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务。
2.实时、在线方式和离线方式的含义是什么(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进行处理,并在一定的时间内作出反应并进行控制,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:在计算机控制系统中,如果生产过程设备直接与计算机连接,生产过程直接受计算机的控制,就叫做“联机”方式或“在线”方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制,而是通过中间记录介质,靠人进行联系并作相应操作的方式,则叫做“脱机”方式或“离线”方式。
3.微型计算机控制系统的硬件由哪几部分组成各部分的作用是什么—由四部分组成。
图微机控制系统组成框图(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
微机控制技术第三章、第四章练习题答案
微机控制技术第三章、第四章练习题答案第三章3-1选择题1、MOVX A,@DPTR指令中源操作数的寻址方式是(B)(A)寄存器寻址(B)寄存器间接寻址(C)直接寻址(D)立即寻址2.ORG 0003HLJMP 2000HORG 000BHLJMP 3000H 当CPU响应外部中断0后,PC的值是(B)(A)0003H (B)2000H (C)000BH (D)3000H3.执行PUSH ACC指令,MCS-51完成的操作是(A)(A)SP+1 SP (ACC)(SP)(B)(ACC)(SP)SP-1 SP(B)(C)SP-1 SP (ACC) (SP) (D)(ACC)(SP)SP+1 SP4、LCALL指令操作码地址是2000H,执行完相子程序返回指令后,PC=(D)(C)2000H (B)2001H (C)2002H (D)2003H5、51执行完MOV A,#08H后,PSW的一位被置位(D)(A)(A)C (B)F0 (C)OV (D)P6、下面条指令将MCS-51的工作寄存器置成3区(B)(A)MOV PSW,#13H (B)MOV PSW,#18H(B)SETB CLR (d) SETB CLR7、执行MOVX A,DPTR指令时,MCS-51产生的控制信号是(C)(D)/PSEN (B)ALE (C)/RD (D)/WR8、MOV C,#00H的寻址方式是(A)(A)位寻址(B)直接寻址(C)立即寻址(D)寄存器寻址9、ORG 0000HAJMP 0040HORG 0040HMOV SP,#00H当执行完左边的程序后,PC的值是(C)(A)0040H (B)0041H (C)0042H (D)0043H10、对程序存储器的读操作,只能使用(D)(A)MOV指令(B)PUSH指令(C)MOVX指令(D)MOVC指令3-2判断题。
4.MCS-51的相对转移指令最大负跳距是127B。
(错)128B5.当MCS-51上电复位时,堆栈指针SP=00H。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微机控制技术第三章、第四章练习题答案-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII微机控制技术第三章、第四章练习题答案第三章3-1选择题1、MOVX A,@DPTR指令中源操作数的寻址方式是(B)(A)寄存器寻址(B)寄存器间接寻址(C)直接寻址(D)立即寻址2.ORG 0003HLJMP 2000HORG 000BHLJMP 3000H 当CPU响应外部中断0后,PC的值是(B)(A)0003H (B)2000H (C)000BH (D)3000H3.执行PUSH ACC指令,MCS-51完成的操作是(A)(A)SP+1 SP (ACC)(SP)(B)(ACC)(SP)SP-1 SP(B)(C)SP-1 SP (ACC) (SP) (D)(ACC)(SP)SP+1 SP4、LCALL指令操作码地址是2000H,执行完相子程序返回指令后,PC=(D)(C)2000H (B)2001H (C)2002H (D)2003H5、51执行完MOV A,#08H后,PSW的一位被置位(D)(A)(A)C (B)F0 (C)OV (D)P6、下面条指令将MCS-51的工作寄存器置成3区(B)(A)MOV PSW,#13H (B)MOV PSW,#18H(B)SETB PSW.4 CLR PSW.3 (d) SETB PSW.3 CLR PSW.47、执行MOVX A,DPTR指令时,MCS-51产生的控制信号是(C)(D)/PSEN (B)ALE (C)/RD (D)/WR8、MOV C,#00H的寻址方式是(A)(A)位寻址(B)直接寻址(C)立即寻址(D)寄存器寻址9、ORG 0000HAJMP 0040HORG 0040HMOV SP,#00H当执行完左边的程序后,PC的值是(C)(A)0040H (B)0041H (C)0042H (D)0043H10、对程序存储器的读操作,只能使用(D)(A)MOV指令(B)PUSH指令(C)MOVX指令(D)MOVC指令3-2判断题。
4.MCS-51的相对转移指令最大负跳距是127B。
(错)128B5.当MCS-51上电复位时,堆栈指针SP=00H。
(SP=07H)(错)6.调用子程序指令(如:CALL)及返回指令(如:RET)与堆栈有关但与PC无关。
(错)子序的转返与PC也有关(PC入栈与出栈)7.MOV @R1,#80H (错)5、INC DPTR (对)6、CLR R0 (错)指令系统中没有。
7、MOV @R1,#80H (对)8、ANL R1,#0FH (错)9、ADDC A,C (错)10、XOR P1,#31H (对)3-3简答题1 简述MCS-51汇编语言指令格式。
答:MCS-51汇编语言格式如下:[标号:]操作码助记符[操作数1] [操作数2] [操作数3][注释]标号是用户定义的符号,其值代表这条指令的地址。
操作码助记符是指令系统规定的代表特定指令功能的英文缩写符。
每条指令都有操作码记符。
指令的操作数最多有3个,也有无操作数的指令。
注释字段是用户对程序的说明,便于对程序的阅读和理解。
简答2 MCS-51指令系统主要有哪几种寻址方式?试举例说明。
答:MCS-51指令操作数主要有以下7种寻址方式:寻址方式举例立即寻址 MOV A,#16直接寻址 MOV 20H,P1寄存器寻址 MOV A,R0寄存器间接寻址 MOVX A, @DPTR变址寻址 MOVC A, @A+DPRT相对寻址 SJMP LOOP位寻址 ANL C,70H3对访问内部RAM和外部RAM,各应采用哪些寻址方式?答:对内部RAM的寻址方式有直接寻址、寄存器间接寻址和可对位寻址的位寻址。
对外部RAM的寻址方式只能用寄存器R0/R1(8位地址)或DPTR(16位地址)间接寻址。
4设内部RAM(30H)=5AH,(5AH)=40H,(40H)=00H,端口P1=7FH,问执行下列指令后,各有关存储单元(即R0,R1,A,B,P1,30H,40H及5AH单元)的内容如何?MOV R0,#30H ;R0=30HMOV A,@R0 ;A=5AHMOV R1,A ;R1=5AHMOV B,R1 ;B=5AHMOV @R1,P1 ;(5AH)=7FHMOV A,P1 ;A=7FHMOV 40H,#20H ;(40H)=20HMOV 30H,40H ;(30H)=20H解:每一条指令执行后的结果如注释字段所标。
最后结果为:R0=30H,R1=5AH,A=7FH,B=5AH,P1=7FH,(30H)=20H,(40H)=20H,(5AH)=7FH。
5 SJMP(短转移)指令和AJMP(绝对转移)指令的主要区别。
前者提供了以SJMP的下一条指令的起始地址为中心的256字节范围的转移(-128~+127),后者的转移目标地址必须在与AJMP的下一条指令的第一字节相同的2KB区的程序储存器中。
短转移方便了可重定位编码。
SJMP方便了PC可重定位编码,但转移范围小。
而ASJMP转移范围大,但存在跳区的限制,AJMP指令只能位于2KB区的最后2个字节处时,才可跳到下一个区去。
因此用AJMP指令来代替SJMP指令是有条件的,也就是目标地址必须与它下面的指令存放地址在同一个2KB区域内。
3-4编程题1 编程将片内RAM30H单元开始的15B的数据传送到片外RAM3000H开始的单元中去。
解:STRAT:MOV R0,#30HMOV R7,#0FHMOV DPTR,#3000HLOOP: MOV A,@R0MOVX @DPTR,AINC R0INC DPTRDJNZ R7,LOOPRET2 片内RAM30H开始的单元中有10B的二进制数,请编程求它们之和(和<256 ).解ADDIO:MOV R0,30HMOV R7,#9MOV A,@R0LOOP: INC R0ADD A,@R0DJNZ R7,LOOPMOV 30H,ARET3 编一个程序,将累加器中的一个字符从串行接口发送出去.解 SOUT:MOV SCON,#40H ;设置串行接口为工作方式MOV TMOD,#20H ;定时器T1工作于模式2 MOV TL1,#0E8H; ;设置波特率为1200b/sMOV TH1,#0E8HSETB TR1MOV SBUF,AJNB T1,$CLB T1RET4 用查表法编一子程序,将R3中的BCD码转换成ASCII码.解MAIN: MOV A,R3 ;待转换的数送AMOV DPTR,#TAR ;表首地址送DPTRMOVC A,@A+DPTR ;查ASCII码表MOV R3,A ;查表结果送R3RETTAR DB 30H,31H,32H,33H,34HDB 35H,36H,37H,38H,39H5 片内RAM40H开始的单元内有10B二进制数,编程找出其中最大值并存于50H单元中.解 START: MOV R0,#40H ;数据块首地址送R0MOV R7,#09H ;比较次数送R7MOV A,@R0 ;取数送ALOOP: INC R0MOV 30H,@R0 ;取数送30HCJNE A,30H,NEHT ;(A)与(30H)相比NEXT: JNC BIE1 (A)≥(30H)转BIR1MOV A,30H ;(A)<(30H),大数送ABIE1: DJNZ R7,LOOP ;比较次数减1,不为0,继续比较MOV 50H,A ;比较结束,大数送50HRET6 编一子程序,从串行接口接受一个字符.解: START: MOV TMOD,#20H ;定时器T1工作于模式2MOV TH1,#0E8H ;设置波特率为1 200b/sMOV TL1,#0E8HSETB TR1 ;启动T1MOV SCON,#50H ;串行接口工作于方式1,充许接收L1: JNB RI,L1 ;等待接收数据,末接收到数据,继续等待CLR RI ;接收到数据,清RIMOV A,SBUF ;接收到数据送ARET7 利用调子程序的方法,进行两个无符号数相加。
请编主程序及子程序。
解用R0和R1作数据指针,R0指向第一个加数,并兼作“和”的指针,R1指向另一个加数,字节存放到R2中作计数初值。
主程序:JAFA: MOV R0,#20H ;指向加数最低字节MOV R1,#29H ;指向另一加数最低字节MOV R2,#04H ;字节数作计数值ACALL JASUB ;调用加法子程序AJMP $RTE多字节加法子程序:JASUB: CLR CJASUB1: MOV A,@R0 ;取出加数的一个字节(4B无符号数加数)ADDC A,@R1 ;加上另一数的一个字节MOV @R0,A ;保存和数INC R0 ;指向加数的高位INC R1 ;指向另一加数的高位DJNZ R2,JASUB1 ;全部加完了吗?RET8 若图数据块是有符号数,求正数个数,编程并注释。
解 ORG 0030HSTART: MOV 20H,#00H ;计正数个数计数器MOV DPTR,#0000H ;MOVX A,@DPTR ;数据块长度→10HMOV 10H,AINC DPTR ;DPTR指向第一个数的地址TWO: MOVX A,@DPTR ;取数→AJB ACC.7,ONE ;是负数转ONE,准备取下一个数INC 20H ;是正数,正数计数器加1ONE: INC DPTR ;地址指针加1DJNZ 10H,TW ;数据块长度减1不等于0,继续寻找RET9 编制一个循环闪烁灯的程序。
有8个发光二极管,每次其中某个灯闪烁点亮10次后,转到下一个闪烁10次,循环不止。
画出电路图。
解其程序如下:MOV A,#01H ;灯亮初值SHIFT: LCAIL FLASH ;调闪亮10次子程序RR A ;右移一位SJMP SHIFT ;循环FLASH: MOV R2,#0AH 闪烁10次计数FLASH1; MOV P1,A ;点亮LCALL DELAY ;延时MOV P1,#00H ;熄灭LCALL DELAY ;延时DJNZ R2,FLASH1 ;循环RET第四章4-1填空1.MCS-51的Po口作为输出端口时,每位能驱动 8 个SL型TTL负载.2.MCS-51有 4个并行I\O口,其中P0~P3是准双向口,所以由输出转输入时必须先写入"1"3.设计8031系统时,_P0、P2 口不能用作一般I\O口.4.MCS-51串行接口有4种工作方式,这可在初始化程序中用软件填写特殊功能寄存器__SCON _加以选择.5.当使用慢速外设时,最佳的传输方式是中断 .6.当定时器To工作在方式3 时,要占定时器T1的TR1和TF1_两个控制位.7.MCS-51有 5 个中断源,有2 个中断优先级,优先级由软件填写特殊功能寄存器IP 加以选择..8.用串口扩并口时,串行接口工作方式应选为方式 0 .9.在串行通信中,有数据传送方向单工、半双工、全双工三种方式.10.外部中断入口地址为_ 0013H4-2判断1.MCS-51的5个中断源优先级相同。