温度的PID控制及程序示例
pid位置控制算法例题
假设有一个温度控制系统,需要将温度保持在设定值(例如50℃)附近。
使用PID位置控制算法来实现这个系统。
1. 确定系统的输入和输出:
输入:设定温度值(例如50℃)
输出:加热器功率(例如0-100%)
2. 确定控制器参数:
比例增益Kp、积分增益Ki、微分增益Kd
3. 实现PID控制器:
根据公式:u(t) = Kp*e(t) + Ki*∫e(t)dt + Kd*de(t)/dt,其中u(t)为控制器输出,e(t)为误差信号(设定温度与实际温度之差),计算得到加热器功率的控制信号。
4. 实现系统闭环控制:
将计算出的加热器功率控制信号施加到系统中,不断检测实际温度并反馈给控制器,通过调整加热器功率来使实际温度保持在设定温度附近。
C语言编写PID温度控制程序
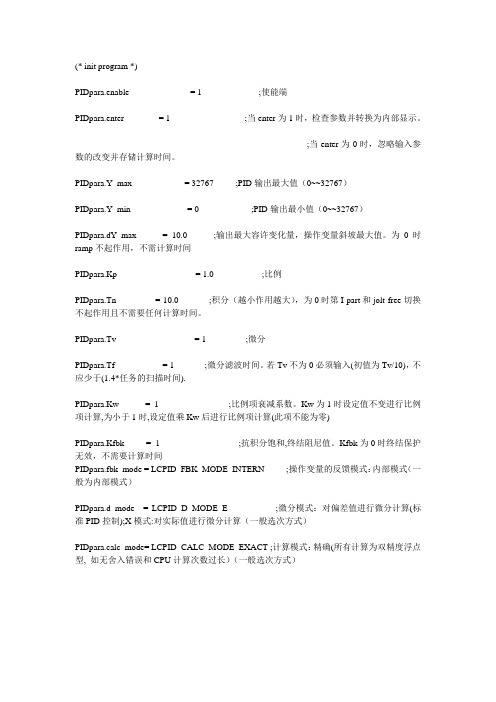
(* init program *)PIDpara.enable = 1 ;使能端PIDpara.enter = 1 ;当enter为1时,检查参数并转换为内部显示。
;当enter为0时,忽略输入参数的改变并存储计算时间。
PIDpara.Y_max = 32767 ;PID输出最大值(0~~32767)PIDpara.Y_min = 0 ;PID输出最小值(0~~32767)PIDpara.dY_max = 10.0 ;输出最大容许变化量,操作变量斜坡最大值。
为0时ramp不起作用,不需计算时间PIDpara.Kp = 1.0 ;比例PIDpara.Tn = 10.0 ;积分(越小作用越大),为0时第I part和jolt-free切换不起作用且不需要任何计算时间。
= 1 ;微分PIDpara.Tf = 1 ;微分滤波时间。
若Tv不为0必须输入(初值为Tv/10),不应少于(1.4*任务的扫描时间).PIDpara.Kw = 1 ;比例项衰减系数。
Kw为1时设定值不变进行比例项计算,为小于1时,设定值乘Kw后进行比例项计算(此项不能为零)PIDpara.Kfbk = 1 ;抗积分饱和,终结阻尼值。
Kfbk为0时终结保护无效,不需要计算时间PIDpara.fbk_mode = LCPID_FBK_MODE_INTERN ;操作变量的反馈模式:内部模式(一般为内部模式)PIDpara.d_mode = LCPID_D_MODE_E ;微分模式:对偏差值进行微分计算(标准PID控制);X模式:对实际值进行微分计算(一般选次方式)PIDpara.calc_mode= LCPID_CALC_MODE_EXACT ;计算模式:精确(所有计算为双精度浮点型, 如无舍入错误和CPU计算次数过长)(一般选次方式)PIDpara FUB LCPIDpara() ;调用PID参数功能块循环程序中程序如下,此程序只对P、I、D三个参数由变量进行输值,变量可在pid程序运行中实时修改,如果大家还需要某些参数实时修改,方法相同:(* cyclic program *)PIDpara.enable = PIDpara.enablePIDpara FUB LCPIDpara() = D_Ctrl ;积分(越小作用越大),为0时第I part和jolt-free 切换不起作用且不需要任何计算时间。
matlab温度pid控制实验代码
一、概述MATLAB是一个功能强大的数学计算软件,在工程领域中被广泛应用。
其中,PID控制是一种常见的控制策略,用于调节系统的稳定性和响应性能。
本文将介绍如何使用MATLAB进行温度PID控制实验,并提供相应的实验代码。
二、实验准备1. 实验器材:- 温度传感器- 加热器- 控制系统2. MATLAB环境:- 安装MATLAB软件- 配置相关工具箱(如Control System Toolbox)三、PID控制原理PID控制器是Proportional(比例)、Integral(积分)和Derivative(微分)三个控制环节的组合。
其控制原理如下:1. 比例环节:根据误差的大小,以一定比例调节输出2. 积分环节:根据误差的积分值,对输出进行修正3. 微分环节:根据误差的变化率,预测未来的趋势,进一步调节输出四、实验步骤1. 确定系统模型:- 使用MATLAB进行系统建模,得到温度控制系统的传递函数2. 设计PID控制器:- 通过MATLAB的控制系统工具箱进行PID控制器的设计3. 实验验证:- 利用实验器材进行温度控制实验,观察系统的响应情况4. 参数调整:- 根据实验结果,逐步调整PID参数,优化系统的控制效果五、实验代码示例以下是一个简单的MATLAB代码示例,用于实现温度PID控制器的设计和实验验证:```matlab温度控制系统建模s = tf('s');G = 1 / (s^2 + 2*s + 1);设计PID控制器Kp = 1.2;Ki = 0.8;Kd = 0.5;C = pid(Kp, Ki, Kd);控制系统闭环T = feedback(C*G,1);绘制系统阶跃响应曲线t = 0:0.01:10;step(T,t);```六、实验结果与分析经过实验验证,利用上述PID控制器设计,在温度控制系统中取得了良好的控制效果。
通过实时调整PID参数,可以有效地实现温度的快速稳定控制,同时确保系统的稳定性和抗干扰能力。
温度的PID控制及程序示例

温度的PID 控制一.温度检测部分首先要OK. 二、PID 调节作用 PID 控制时域的公式))()(1)(()(⎰++=dtt de Td t e Ti t e Kp t y 分解开来:(1) 比例调节器y(t) = Kp * e(t)e(k) 为当前的温差(设定值与检测值的插值) y(k) 为当前输出的控制信号(需要转化为PWM 形式)# 输出与输入偏差成正比。
只要偏差出现,就能及时地产生与之成比例的调节作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点。
但是, Kp 过大会导致动态品质变坏,甚至使系统不稳定。
比例调节器的特性曲线. (2) 积分调节器y(t) = Ki * ∫(e(t))dt Ki = Kp/Ti Ti 为积分时间#TI 是积分时间常数,它表示积分速度的大小,Ti 越大,积分速度越慢,积分作用越弱。
只要偏差不为零就会产生对应的控制量并依此影响被控量。
增大Ti 会减小积分作用,即减慢消除静差的过程,减小超调,提高稳定性。
(3) 微分调节器y(t) = Kd*d(e(t))/dt Kd = Kp*Td Td 为微分时间#微分分量对偏差的任何变化都会产生控制作用,以调整系统输出,阻止偏差变化。
偏差变化越快,则产生的阻止作用越大。
从分析看出,微分作用的特点是:加入微分调节将有助于减小超调量,克服震荡,使系统趋于稳定。
他加快了系统的动作速度,减小调整的时间,从而改善了系统的动态性能。
三.PID 算法:由时域的公式离散化后可得如下公式:y(k) = y(k-1)+(Kp+Ki+Kd)*e(k)-(Kp +2*Kd)*e(k-1) + Kd*e(k-2)y(k) 为当前输出的控制信号(需要转化为PWM形式)y(k-1)为前一次输出的控制信号e(k) 为当前的温差(设定值与检测值的插值)e(k-1) 为一次前的温差e(k-2) 为二次前的温差Kp 为比例系数Ki = Kp*T/Ti T为采样周期Kd = Kp*Td/T四.PID参数整定(确定Kp,Ts,Ti,Td):温度控制适合衰减曲线法,需要根据多次采样的数据画出响应曲线。
PID温控程序

以下为PID温控程序,没有采用SFB41是因为些模块比较大,影响系统反应速度。
些温度控制系统不用微分(D)控制,只用PI控制Kc 为回路的增Ts 为采样的时间间隔Ti 为积分时间MDSPn 为采样时刻n的设定值PVn 为采样时刻n的过程变量值MX 为采样时刻n-1的积分项(又称为积分前项)PID运算公式1:MPN=KC*(SPN-PVN)PID运算公式2;MIN=KC*TS/TI*(SPN-PVN)+MXPID运算公式3:MN=MPN+MIN不用微分(D)控制,原工式为:MN=MPN+MIN+MDNPI运算程序对应的DB1:主程序对应的DB2:模拟输入量:IW2模拟输出量:PQDOKc 为回路的增Ts 为采样的时间间隔Ti 为积分时间MDSPn 为采样时刻n的设定值PVn 为采样时刻n的过程变量值MX 为采样时刻n-1的积分项(又称为积分前项)对应地址:网络1和 2 是模拟采集的“模拟输入量:IW2”和组态画面上Kc Ts Ti SPn PVn 的设定值。
实际操作中不需要。
改变模拟输入量:IW2观察模拟输出量变化:PQDO观察模拟输出量变化:PQDO观察模拟输出量变化:PQDO观察模拟输出量变化:PQDOOK!其他变量改变后一样能回到平衡:如改以下值:Kc 为回路的增Ts 为采样的时间间隔Ti 为积分时间MDSPn 为采样时刻n的设定值以下为PID运算温控程序,没有采用SFB41是因为些模块比较大,影响系统反应速度。
些温度控制系统不用微分(D)控制,只用PI控制下面是主程序:FB2下面是各电机启动程序模拟量输入,数据格式转换模拟量输出,数据格式转换限制输出范围:0~32767停止后全部清零,为组态画面变量编写的程序以下为模拟给PN当前值,SP设定值,TI积分时间,TS采样时间,KC增益量,结果:FB2我们看一下温度显示:Kc DB2。
DBD 66 为回路的增Ts DB2。
DBD74 为采样的时间间隔Ti DB2。
温度控制的PID算法及C程序实现

本文档如对你有帮助,请帮忙下载支持!温度控制与PID 算法温度控制与PID 算法j 较为复杂,下面结合实际浅显易懂的阐述一下 PID 控制理论,将温度控制及PID 算法作一个简单的描述。
1.温度控制的框图asgstiB这是一个典型的闭环控制系统,用于控制加热温区的温度( PV )保持在恒定的温度 设定值(SV )。
系统通过温度采集单元反馈回来的实时温度信号( PV )获取偏差值(EV ),偏差值经过 PID 调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近 于零。
例如,当某一时刻炉内过PCB 板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回升。
其调节过程如下:温度控制的功率输出采用脉宽调制的方法。
固态继电器电压U ouT 。
当SSR 的触发角触发时,电源电压U AN 通过SSR 的输出端加到发热管的两 端;当SSR 的触发角没有触发信号时,SSR 关断。
因此,发热管两端的平均电压为U d = (t/T )* U AN =K* U AN其中K= t/T ,为一个周期T 中,SSR 触发导通的比率,称为负载电压系数或是占空比, K的变化率在0- 1之间。
一般是周期 T 固定不便,调节t,当t 在0-T 的范围内变化时, 发热管的电压即在 0- U AN 之间变化,这种调节方法称为定频调宽法。
下面将要描述的 PID调节器的算式在这里的实质即是运算求出一个实时变化的,能够保证加热温区在外界干扰的情况下仍能保持温度在一个较小的范围内变化的合理的负载电压系数K 。
甌汕血Ikinl 曲汀 備錢(哉0.1/ 1A『'、、A____ 5^50 工 /it TTVI PID 调节鼬 固憲继电器勻岌恿習 X ?n -Tr-Zn 4f t 沮LEV)*冲端出易度 A 崭1出功率SSR 的输出端为脉宽可调的2.温度控制的两个阶段本文档如对你有帮助,请帮忙下载支持! 本文档如对你有帮助,请帮忙下载支持!温度控制系统是一个惯性较大的系统,也就是说,当给温区开始加热之后, 并不能立即观察得到温区温度的明显上升;同样的,当关闭加热之后, 温区的温度仍然有一定程度的上升。
S7-200中的PID控制(温度控制举例)
Slide 12
1
PID温度控制示例-实现过程
通过PID向导配置PID回路 PID相关指令及回路表 通过文本显示向导配置TD200C显示屏 编写程序
Slide 13
1
实现过程-通过PID向导配置PID回路
步骤
1 进入PID配置向导
2选择要配置的PID回路
Slide 6
6
PID温度控制示例
提纲
PID控制理论简介 PID温度控制示例
工作原理 任务目标 实现过程
Slide 7
7
S7-200 PID 温度控制
PID温度控制示例
工作原理 任务目标 实现过程
Slide 8
8
PID温度控制示例-工作原理
PID温度控制系统是一个闭环系统,由 PLC的输出控制加热器对热电阻的加热 程度.
1. 选择一个未使用的V存储区来存放模块的配置信息,可 以点击“建议地址”按钮,让系统来选定一个合适的存 储区。这里PID回路存储区的首地址为VB400。
2. 点击“下一步”按钮。
Slide 20
2
配置PID回路-步骤7:指定子程序和中断程序
1. 为向导子程序和中断程序命名。 2. 点击“下一步”按钮。
相关指令
通过向导完成对PID回路的 配置后回生成子程序 “PIDx_INIT”。
Slide 24
2
PID相关指令及回路表- PIDx_INIT指令
PIDx_INIT 指令根据在PID向导中设 置的输入和输出执行 PID 功能。 每次扫描均调用该指令。
PIDx_INIT 指令的输入和输出取决 于在PID 向导中所作的选择。例 如,如果选择“增加PID手动控制 ”功能则在指令中将显示 Auto_Manual(自动/手动切换)和 ManualOutput(手动模式下的输出 值)输入,如果在 PID 向导的“ 回路报警选项”屏幕中选择“使 能低限报警(PV)”,则在指令 中将显示LowAlarm(低限报警) 输出。
PID烤箱温度控制(温度专用的PID自动调整功能)设计实例详解.doc
PID 烤箱温度控制(温度专用的PID 自动调整功能)设计实例详解【控制要求】使用者对烤箱的温度环境特性不了解,控制的目标温度为80℃,利用PID 指令温度环境下专用的自动调整功能,实现烤箱温度的PID 控制。
利用DVP04PT-S 温度模块将烤箱的现在值温度测得后传给PLC 主机,DVP12SA 主机先使用温度自动调整参数功能(D204=K3)做初步调整,自动计算出最佳的PID 温度控制参数,调整完毕后,自动修改动作方向为已调整过的温度控制专用功能(D204=K4),并且使用该自动计算出的参数实现对烤箱温度的PID 控制。
使用该自动调整的参数进行PID 运算,其输出结果(D0)作为GP 指令的输入,GP 指令执行后Y0 输出可变宽度的脉冲(宽度由D0 决定)控制加热器装置,从而自动实现对烤箱温度的PID 控制。
【元件说明】【控制程序】【程序说明】该指令格式:S1-->目标值(SV)S2-->现在值(PV)S3-->参数(通常需自己进行调整和设置,参数的定义请参考本例最后的PID 参数表)D-->输出值(MV)(D 最好指定为停电保持的数据寄存器)PID 指令使用的控制环境很多,因此请适当地选取动作方向,本例中温度自动调整功能只适用于温度控制环境,切勿使用在速度、压力等控制环境中,以免造成不当的现象产生。
一般来说,由于控制环境不一样,PID 的控制参数(除温度控制环境下提供自动调整功能外)需靠经验和测试来调整,一般的PID 指令参数调整方法步骤1:首先将KI及KD值设为0,接着先后分别设设置KP为5、10、20 及40,别记录其SV 及PV 状态,其结果如下图所示:步骤2:观察上图后得知KP为40 时,其反应会有过冲现象,因此不选用;而KP为20 时,其PV 反应曲线接近SV 值且不会有过冲现象,但是由于启动过快,因此输出值MV瞬间值会很大,所以考虑暂不选用;接着KP为10 时,其PV 反应曲线接近SV 值并且是比较平滑接近,因此考虑使用此值;最后KP为 5 时,其反应过慢,因此也暂不考虑使用。
PID调节温度控制实例(西门子S7-300)
PID调节温度控制实例(西门⼦S7-300)控制要求
1.⽔罐⽔温设置在50℃
2.误差值在±1℃
硬件配置
设计⽅案
1.采样:使⽤ PT100 热电阻经过变送器把⽔缸温度传送给S7-300 PLC。
2. 数据的处理:在 S7-300 PLC 中经过 PID 调节运算输出模拟量信号到功率调节器中。
3.温度调节:在功率调节器中把对应的模拟量转化为对应的功率来驱动热得快;
程序编写
1. 创建名称为PID调节的⼯程,添加CPU314C-2DP.西门⼦CPU314C-2DP,⾃带有模
拟量输⼊输出通道,⽆需扩展模块,在这⾥我们要注意他们的地址,以及输⼊输出的测量类型与测量范围。
这次试验⽤的是4-20mA的变送器,输出我们采⽤0-10V电压输出,这些参数需要在硬件组态时进⾏设置,设置好以后注意编译保存下载。
2.程序的编写
3.PID 调节
⾸先在开始菜单中打开PID 调节⾯板,如下图所⽰:。
温度控制的PID算法 及C程序实现
温度控制与PID算法温度控制与PID算法j较为复杂,下面结合实际浅显易懂的阐述一下PID控制理论,将温度控制及PID算法作一个简单的描述。
1.温度控制的框图这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。
系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。
例如,当某一时刻炉内过PCB板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回升。
其调节过程如下:温度控制的功率输出采用脉宽调制的方法。
固态继电器SSR的输出端为脉宽可调的电压U OUT 。
当SSR的触发角触发时,电源电压U AN通过SSR的输出端加到发热管的两端;当SSR的触发角没有触发信号时,SSR关断。
因此,发热管两端的平均电压为U d=(t/T)* U AN=K* U AN其中K=t/T,为一个周期T中,SSR触发导通的比率,称为负载电压系数或是占空比,K 的变化率在0-1之间。
一般是周期T固定不便,调节t, 当t在0-T的范围内变化时,发热管的电压即在0-U AN之间变化,这种调节方法称为定频调宽法。
下面将要描述的PID 调节器的算式在这里的实质即是运算求出一个实时变化的,能够保证加热温区在外界干扰的情况下仍能保持温度在一个较小的范围内变化的合理的负载电压系数K。
2.温度控制的两个阶段温度控制系统是一个惯性较大的系统,也就是说,当给温区开始加热之后,并不能立即观察得到温区温度的明显上升;同样的,当关闭加热之后,温区的温度仍然有一定程度的上升。
另外,热电偶对温度的检测,与实际的温区温度相比较,也存在一定的滞后效应。
这给温度的控制带来了困难。
因此,如果在温度检测值(PV)到达设定值时才关断输出,可能因温度的滞后效应而长时间超出设定值,需要较长时间才能回到设定值;如果在温度检测值(PV)未到设定值时即关断输出,则可能因关断较早而导致温度难以达到设定值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
温度的PID 控制一.温度检测部分首先要OK. 二、PID 调节作用 PID 控制时域的公式))()(1)(()(⎰++=dtt de Td t e Ti t e Kp t y 分解开来:(1) 比例调节器y(t) = Kp * e(t)e(k) 为当前的温差(设定值与检测值的插值) y(k) 为当前输出的控制信号(需要转化为PWM 形式)# 输出与输入偏差成正比。
只要偏差出现,就能及时地产生与之成比例的调节作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点。
但是, Kp 过大会导致动态品质变坏,甚至使系统不稳定。
比例调节器的特性曲线. (2) 积分调节器y(t) = Ki * ∫(e(t))dt Ki = Kp/Ti Ti 为积分时间#TI 是积分时间常数,它表示积分速度的大小,Ti 越大,积分速度越慢,积分作用越弱。
只要偏差不为零就会产生对应的控制量并依此影响被控量。
增大Ti 会减小积分作用,即减慢消除静差的过程,减小超调,提高稳定性。
(3) 微分调节器y(t) = Kd*d(e(t))/dt Kd = Kp*Td Td 为微分时间#微分分量对偏差的任何变化都会产生控制作用,以调整系统输出,阻止偏差变化。
偏差变化越快,则产生的阻止作用越大。
从分析看出,微分作用的特点是:加入微分调节将有助于减小超调量,克服震荡,使系统趋于稳定。
他加快了系统的动作速度,减小调整的时间,从而改善了系统的动态性能。
三.PID 算法:由时域的公式离散化后可得如下公式:y(k) = y(k-1)+(Kp+Ki+Kd)*e(k)-(Kp +2*Kd)*e(k-1) + Kd*e(k-2)y(k) 为当前输出的控制信号(需要转化为PWM形式)y(k-1)为前一次输出的控制信号e(k) 为当前的温差(设定值与检测值的插值)e(k-1) 为一次前的温差e(k-2) 为二次前的温差Kp 为比例系数Ki = Kp*T/Ti T为采样周期Kd = Kp*Td/T四.PID参数整定(确定Kp,Ts,Ti,Td):温度控制适合衰减曲线法,需要根据多次采样的数据画出响应曲线。
所以需要通过串口将采样时间t, 输出y(t)记录下来,方便分析。
1)、不加入算法,系统全速加热,从常温加热到较高的温度的时间为Tk, 则采样时间一般设为 T = Tk/10。
2)、置调节器积分时间TI=∞,微分时间TD=0,即只加比例算法:y(k) = y(k-1)+Kp*e(k)比例带δ置于较大的值。
将系统投入运行。
(δ = 1/Kp)3)、待系统工作稳定后,对设定值作阶跃扰动,然后观察系统的响应。
若响应振荡衰减太快,就减小比例带;反之,则增大比例带。
如此反复,直到出现如图所示的衰减比为4:1的振荡过程时,记录此时的δ值(设为δS),以及TS 的值(如图中所示)。
当采用衰减比为10:1振荡过程时,应用上升时间Tr替代振荡周期TS计算。
系统衰减振荡曲线图中,TS为衰减振荡周期,Tr为响应上升时间。
据表中所给的经验公式计算δ、TI及TD的参数。
大致计算出Kp,Ti,Td后代入公式,然后完善算法。
让系统运作多测试几次。
直到满意为止。
以下是网上找的一个示例程序#include<reg51.h>#include<intrins.h>#define N0 40536#define nop() _nop_()#define uchar unsigned char#define uint unsigned int/*程序中变量数组定义*/uchar idata table[]={"Real-time Temp:"};//第一行显示"Real-time Temp:"uchar idata table1[5];uchar data1,kp,ki,kd;uint t,hightime,count; //占空比调节参数uint rltemp,settemp=350;int e1,e2,e3,duk,uk;/*引脚定义*/sbit EOC=P2^6;sbit OE=P2^5;sbit START=P2^7;sbit lcden=P3^2;sbit lcdrw=P3^1;sbit lcdrs=P3^0;sbit pwm=P3^3;/******************************延时子程序*******************************/void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=29;y>0;y--);}/******************************LCD忙检测*******************************/ bit lcd_busy(){bit result;lcdrw = 1;lcdrs = 0;lcden = 1;nop();nop();nop();nop();result = (bit)(P0&0x80);lcden = 0;return(result);}/****************************** LCD写命令子程序*******************************/ void write_com(uchar com){while(lcd_busy());//忙等待lcdrs = 0;lcdrw = 0;P1 = com;delay(5);lcden = 1;delay(5);lcden = 0;}/****************************** LCD写数据子程序*******************************/ void write_data(uchar date){while(lcd_busy()); //忙等待lcdrs = 1;lcdrw = 0;P1=date;delay(5);lcden = 1;delay(5);lcden = 0;}/******************************LCD初始化*******************************/ void lcd_init(){lcden = 0;write_com(0x38);delay(5);write_com(0x0f);delay(5);write_com(0x06);delay(5);write_com(0x01);delay(5);write_com(0x80);delay(5);write_com(0x01);}/****************************** 定时器初始化*******************************/ void time_init(){EA = 1;ET0 = 1;ET1 = 1;TR0 = 1;TR1 = 1;TMOD = 0x11;TH0 = N0/256;TL0 = N0%256;TH1 = 0X3C;TL1 = 0XB0;}/****************************** PID算法系数装载*******************************/ void Pid_init(){hightime= 0; //输出的占空比e1 = 0; //本次的温度差e2 = 0; //前一次的温度差e3 = 0; //两次前的温度差kp = 10; //需要根据试验确定参数ki = 5; //需要根据试验确定参数kd = 5; //需要根据试验确定参数}/******************************温度比较PID算法*******************************/void pid_ys(){if(rltemp<settemp) // 如果实际温度小于设定温度值{if(settemp-rltemp>20) // 如果相差20度(根据实际情况确定是多少){hightime=100; //全速加热}else //否则运行PID算法进行平滑加热{e1 = settemp-rltemp;duk=(kp*(e1-e2)+ki*e1+kd*(e1-e2*2+e3))/10; // 式(1)因为Kp是10,输入放大了10倍,所以duk的输出结果需要除以10uk = uk+duk;/*****************************式(1)与上面提到的公式类似y(k) = y(k-1)+(Kp+Ki+Kd)*e(k)-(Kp +2*Kd)*e(k-1) + Kd*e(k-2) 可以写成y(k)-y(k-1)=(kp*(e(k)-e(k))+ki*e(k)+kd*(e(k)-e(k-1)*2+e(k-2)) 式(1)中duk 相当于y(k)-(k-1)*****************************/if(uk>100)uk = 100; //设置饱和控制,else if(uk<-100)uk = -100;if(uk<0){hightime=-uk;}else{hightime=uk;}e3 = e2;e2 = e1;}}if(rltemp>=settemp) // 如果实际温度大于设定值{if(rltemp-settemp >0) //只要实际温度与设定值不相等{hightime=0; //停止加热}else /{e1 = rltemp-settemp;duk=(kp*(e1-e2)+ki*e1+kd*(e1-e2*2+e3));uk = uk+duk;if(uk>100)uk = 100;else if(uk<-100)uk = -100;e3 = e2;e2 = e1;}}}/******************************主函数*******************************/void main(){uint i;time_init();//定时器初始化Pid_init(); // PID初始化lcd_init();// LCD初始化table1[5]=0x43;table1[4]=0xdf;table1[2]=0x2e; //小数点摄氏度符号ASCII码for(i=0;i<15;i++) //带循环第一行显示"Real-time Temp:"{write_data(table[i]);delay(20);}while(1){t=data1*196/100;table1[3]=(t%100)%10+0x30;table1[1]=(t%100)/10+0x30;table1[0]=t/100+0x30; //以上温度数据转化rltemp = t; //给PID算法装载实际值write_com(0x80+0x45);//写LCD第二行的初地址for(i=0;i<5;i++) //该循环显示温度值{write_data(table1[i]);delay(20);}pid_ys();//运行温度比较PID算法}}/******************************温度采集转换的定时中断0.5s刷新一次数据*******************************/void timer0() interrupt 1{uint j;j++;if(j==20){OE = 0;START = 0;_nop_();START = 1;_nop_();START = 0;while(EOC==0);OE = 1;_nop_();data1 = P0;_nop_();OE = 0;j = 0;}TH0=N0/256;TL0=N0%256;}/****************************** PWM波输出的定时中断*******************************/ void timer1() interrupt 3{if(++count<=(hightime))pwm=0;else if(count<=100){pwm=1;}elsecount=0;TH1=0x3c;TL1=0xb0;}。