PWM的调速原理与应用—小车调速
pwm调速循迹避障小车的总结与体会
PWM调速循迹避障小车是一种基于单片机控制系统的智能小车,具有很高的实用价值和教学意义。
在实际应用中,PWM调速循迹避障小车可以应用于智能家居、智能物流等领域,为人们的生活和工作带来便利。
在设计和制造PWM调速循迹避障小车的过程中,我们经历了许多挑战和收获了许多成果。
在此,我将共享我对PWM调速循迹避障小车的总结与体会。
一、总结1. PWM调速原理PWM即脉冲宽度调制,是一种用来调节模拟电路的技术。
在PWM 调速循迹避障小车中,我们通过改变电机工作周期内的通电时间来控制电机的转速,从而实现小车的速度调节。
2. 循迹原理循迹是指小车根据预设的路径行驶,通常使用红外线传感器、摄像头等设备来实现。
在PWM调速循迹避障小车中,我们利用红外线传感器来检测小车周围的环境,根据检测结果来调整小车的行驶方向,实现循迹功能。
3. 避障原理避障是指小车在行驶过程中遇到障碍物时,能够及时停车或绕行,避免发生碰撞。
在PWM调速循迹避障小车中,我们通过超声波传感器等设备来检测前方障碍物的距离,根据检测结果来控制小车的行驶,实现避障功能。
4. 控制系统PWM调速循迹避障小车的控制系统由单片机、传感器、驱动电路和执行机构等部分组成。
通过单片机对传感器检测结果的分析和处理,再通过驱动电路和执行机构的协调工作,实现对小车的调速、循迹和避障控制。
二、体会1. 技术挑战在设计和制造PWM调速循迹避障小车的过程中,我们遇到了许多技术挑战,比如传感器的精度和稳定性、控制算法的优化等。
通过不断的尝试和改进,我们最终克服了这些挑战,成功实现了小车的功能。
2. 团队合作制造PWM调速循迹避障小车是一个涉及多个领域知识的复杂任务,需要团队成员之间的合作和协调。
在这个过程中,我们学会了有效的交流和合作,培养了团队精神,提高了解决问题的能力。
3. 实践意义通过制造PWM调速循迹避障小车,我们不仅加深了对相关知识的理解,还锻炼了动手能力和解决实际问题的能力。
两轮智能车pwm电机调速程序
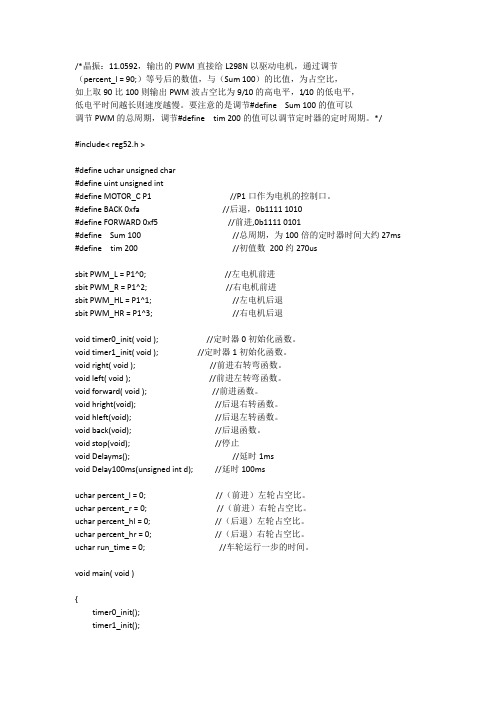
/*晶振:11.0592,输出的PWM直接给L298N以驱动电机,通过调节(percent_l = 90;)等号后的数值,与(Sum 100)的比值,为占空比,如上取90比100则输出PWM波占空比为9/10的高电平,1/10的低电平,低电平时间越长则速度越慢。
要注意的是调节#define Sum 100的值可以调节PWM的总周期,调节#define tim 200的值可以调节定时器的定时周期。
*/#include< reg52.h >#define uchar unsigned char#define uint unsigned int#define MOTOR_C P1 //P1口作为电机的控制口。
#define BACK 0xfa //后退,0b1111 1010#define FORWARD 0xf5 //前进,0b1111 0101#define Sum 100 //总周期,为100倍的定时器时间大约27ms #define tim 200 //初值数200约270ussbit PWM_L = P1^0; //左电机前进sbit PWM_R = P1^2; //右电机前进sbit PWM_HL = P1^1; //左电机后退sbit PWM_HR = P1^3; //右电机后退void timer0_init( void ); //定时器0初始化函数。
void timer1_init( void ); //定时器1初始化函数。
void right( void ); //前进右转弯函数。
void left( void ); //前进左转弯函数。
void forward( void ); //前进函数。
void hright(void); //后退右转函数。
void hleft(void); //后退左转函数。
void back(void); //后退函数。
void stop(void); //停止void Delayms(); //延时1msvoid Delay100ms(unsigned int d); //延时100msuchar percent_l = 0; //(前进)左轮占空比。
pwm调速系统解释 -回复

pwm调速系统解释-回复PWM调速系统解释随着科技的不断进步和工业的快速发展,调速系统在许多领域变得越来越重要。
其中一种常见的调速方式是脉冲宽度调制(PWM)调速系统。
本文将介绍PWM调速系统的原理、应用和优势。
一、脉冲宽度调制(PWM)调速系统的原理在PWM调速系统中,通过改变信号的占空比,控制电源电压的大小,从而改变电机的速度。
具体来说,PWM调速系统在每个周期内发出一系列短暂的高频脉冲信号,每个脉冲信号由高电平和低电平组成。
高电平的持续时间称为脉宽,低电平的持续时间称为间隔。
通过改变脉冲的脉宽来控制电机的速度。
脉冲宽度调制的原理基于能量守恒定律。
在PWM调速系统中,电源电压的大小是不变的,因此根据能量守恒定律,电源输出的能量必须与电机负载吸收的能量相等。
当脉冲的脉宽增加时,电机得到的能量也增加,速度就会提高。
反之亦然,当脉冲的脉宽减小时,电机得到的能量减少,速度就会降低。
二、脉冲宽度调制(PWM)调速系统的应用PWM调速系统在许多领域都有广泛的应用。
以下是几个例子:1. 电动汽车:PWM调速系统用于控制电动汽车的电机,实现高效的能量转换和精确的速度调节,从而提高电动汽车的性能和续航里程。
2. 工业生产:PWM调速系统用于控制各种工业设备中的电机,如风机、泵等,实现精确的速度控制,提高生产效率和工艺质量。
3. 家用电器:PWM调速系统用于控制家用电器中的电机,如洗衣机、空调等,以实现不同的运行模式和节能。
4. 机器人技术:PWM调速系统用于控制机器人的电机,实现精确的运动和操作,提高机器人的灵活性和准确性。
5. 飞机和船舶:PWM调速系统用于控制飞机和船舶的引擎,实现可靠的动力输出和稳定的速度控制,提高交通工具的性能和安全性。
三、脉冲宽度调制(PWM)调速系统的优势与传统的调速方式相比,PWM调速系统具有以下几点优势:1. 高效能:PWM调速系统在能量转换过程中的损失较小,提高了系统的能效。
51单片机智能小车按键调速前进程序源代码、电路原理图和电路器件表
51单片机智能小车按键调速前进程序源代码、电路原理图、电路器件表智能小车PWM调速是通过设置pwmval_left_init的和pwmval_right_init这2个变量的值来实现的,需要通过修改程序代码中这2个变量的值,这2个变量的值设置好后,在程序运行的过程中是不能修改的。
而智能小车的按键调速通过按键达到修改这2个变量的值,从而达到对智能小车调速的目的。
每按下K3按键一次,变量pwmval_left_init和pwmval_right_init减1,智能小车减速。
每按下K4按键一次,变量pwmval_left_init和pwmval_right_init加1,智能小车加速。
具体实现方法见下文的程序源代码。
下文主要提供了智能小车按键调速前进完整程序原代码、电路原理图以及电路器件表。
智能小车核心板原理图STC15W4K56S4智能小车核心板器件(BOM)表实物图060306030603PIN插针PIN2x1406030603直插LQFP7x7-48 STC15W4K56S4智能小车核心板正面STC15W4K56S4智能小车核心板背面智能小车驱动板原理图51单片机(STC15W4K56S4)智能小车驱动板器件(BOM)表实物图直插直插直插直插直插直插直插直插直插直插PIN与PIN之间的间隔2.54mm插电池盒PIN与PIN间隔2.54mm,插电机3PIN插针,针与针间隔2.54mm插舵机红色插针和黑色插针3.3V红色插针、GND黑色插针PIN红色插针和黑色插针5V PIN红色插针和黑色插针VINPIN与PIN之间的间隔2.54mm 插MQ2模块针与针间隔2.54mm插GP2Y1014AU模块针与针间隔2.54mm语音播报实验时,串口4插语音播报模块针与针间隔2.54mmIO扩展用,没有必要不要焊接针与针间隔2.54mm插DHT11模块用4PIN插针,针与针间隔2.54mm用杜邦线连接超声波模块针与针间隔2.54mm插蓝牙模块(要原厂原装的)用8PIN插针,针与针间隔2.54mm杜邦线连接红外循迹避障模块用4PIN插针,针与针间隔2.54mm用杜邦线连接测速模块针与针间隔2.54mm插5V的LCD1602液晶MPU6050不要焊接。
用PWM方法实现电机调速(模板)任务

一、电机调速控制模块:方案一:采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。
但是电阻网络只能实现有级调速,而数字电阻的元器件价格比较昂贵。
更主要的问题在于一般电动机的电阻很小,但电流很大;分压不仅会降低效率,而且实现很困难。
方案二:采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度进行调整。
这个方案的优点是电路较为简单,缺点是继电器的响应时间慢、机械结构易损坏、寿命较短、可靠性不高。
方案三:采用集成芯片L298N 。
L298N是SGS(通标标准技术服务有限公司>公司的产品,内部包含4通道逻辑驱动电路。
是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。
其有控制精度高、稳定性好、响应速度快等优点,使用它和PWM技术可控制驱动电流大小以达到电机速度的调整。
兼于方案三调速特性优良、调整平滑、调速范围广、过载能力大,因此本设计采用方案三。
二、电机测速模块方案一:使用霍尔传感器。
霍尔传感器是利用霍尔效应实现磁电转换的一种传感器,它具有灵敏度高,线性度好,稳定性高、体积小和耐高温等特点,在机车控制系统中占有非常重要的地位。
对测速装置的要求是分辨能力强、高精度和尽可能短的检测时间。
其对硬件电路要求也要高。
方案二:使用光电码盘。
光电码盘是由光学玻璃制成,在上面刻有许多同心码道,每个码道上都有按一定规律排列的透光和不透光部分。
工作时,光投射在码盘上,码盘随运动物体一起旋转,透过亮区的光经过狭缝后由光敏元件接受,光敏元件的排列与码道一一对应,对于亮区和暗区的光敏元件输出的信号,前者为“1”,后者为“0”,当码盘旋转在不同位置时,光敏元件输出信号的组合反映出一定规律的数字量,代表了码盘轴的角位移。
但其使用较麻烦,准确度与反应速度不高。
对软件方面要求也高。
方案三:使用光电开关GK105。
光电开关<光电传感器)是光电接近开关的简称,它是利用被检测物对光束的遮挡或反射,由同步回路选通电路,从而检测物体有无的。
PWM的调速原理与应用—小车调速

12
Copyright © Http://
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
P89V51RD2的PWM功能应用
利用P89V51RD2的PWM功能,在P1.7口输出占空比为50%的PWM脉冲信 号。程序清单为:
MOV MOV MOV MOV SETB MOV MOV MOV CMOD,#04H; , TMOD,#02H , TL0,#20H , TH0,#20H , TR0 CCAPM4,#42H , CCAP4H,#127 , CCON,#40H , 阵列的CEX4的PWM功能 ;启用PCA阵列的 启用 阵列的 的 功能 ;设定PWM的占空比 设定 的占空比 ;启动PCA计数器工作 启动 计数器工作 初始化, 作为PCA阵列的计数脉冲来源 ;PCA初始化,选择 作为 初始化 选择T0作为 阵列的计数脉冲来源 ;T0初始化 初始化 ;设定PWM的周期 设定 的周期
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
10
Copyright © Http://
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
CMOD-PCA计数器方式寄存器 - 计数器方式寄存器
位 符号 D7 CIDL D6 WDTE D5 D4 D3 D2 CPS1 D1 CPS0 D0 ECF
CIDL:计数器空闲控制:CIDL=0时,空闲模式下 :计数器空闲控制: 计数器继续工作。 时 空闲模式下PCA计数器继续工作。CIDL=1时, 计数器继续工作 = 时 空闲模式下PCA计数器禁能。 计数器禁能。 空闲模式下 计数器禁能 WDTE:看门狗定时器使能:WDTE=0时,禁止模块 的看门狗定时器功能。WDTE=1 :看门狗定时器使能: 的看门狗定时器功能。 时 禁止模块4的看门狗定时器功能 时使能看门狗定时器。 时使能看门狗定时器。 CPS1、CPS0 :PCA计数脉冲选择。 、 计数脉冲选择。 计数脉冲选择
智能小车PWM调速原理
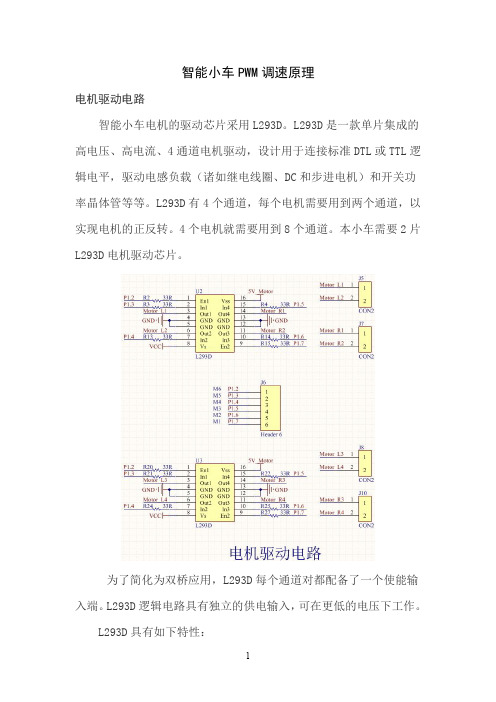
智能小车PWM调速原理电机驱动电路智能小车电机的驱动芯片采用L293D。
L293D是一款单片集成的高电压、高电流、4通道电机驱动,设计用于连接标准DTL或TTL逻辑电平,驱动电感负载(诸如继电线圈、DC和步进电机)和开关功率晶体管等等。
L293D有4个通道,每个电机需要用到两个通道,以实现电机的正反转。
4个电机就需要用到8个通道。
本小车需要2片L293D电机驱动芯片。
为了简化为双桥应用,L293D每个通道对都配备了一个使能输入端。
L293D逻辑电路具有独立的供电输入,可在更低的电压下工作。
L293D具有如下特性:1、L293D每个通道的电流输出能力达600 mA2、L293D每个通道的峰值输出电流达1.2 A(非重复)3、便于使能4、L293D具有过温保护5、逻辑“0”输入电压高达1.5 V(高抗噪性)6、内置箝位二极管智能小车的调速智能小车的部分实验中,电机不能时刻保持在全速运转的状态,需要控制小车速度才能完成一些特定的功能。
比如在“智能小车循迹实验”中,如果小车速度过快,来不及反应做出方向的调整,小车会很容易跑离轨迹。
PWM调速是目前电机的主流调速方式。
智能小车采用脉宽调制(PWM)的办法来控制电机的转速,从而控制智能小车的速度。
在此种情况下,电池电源并非连续地向直流电机供电,而是在一个特定的频率下为直流电机提供电能。
不同占空比的方波信号,调节对直流电机的通断电,能起到对直流电机调速作用。
这是因为电机实际上是一个大电感,它有阻碍输入电流和电压突变的能力,因此脉冲输入信号被平均分配到作用时间上。
这样,改变L293D始能端EN1和EN2上输入方波的占空比就能改变加在电机两端的电压大小,从而改变了直流电机转速。
电路中用微处理机来实现脉宽调制,通常的方法有两种:(1)用软件方式来实现:通过执行软件延时交替改变EN1和EN2输出逻辑状态来产生脉宽调制信号,设置不同的延时时间得到不同的占空比。
(2)用硬件方式实现:硬件自动产生PWM信号,不占用CPU处理的时间。
pwm电机 调速原理
pwm电机调速原理
PWM电机调速原理
PWM(Pulse Width Modulation,脉宽调制)是一种通过改变信号的脉冲宽度来控制电机转速的调速方法。
在PWM调速原理中,控制器向电机输出一段固定频率的方波信号,通过改变方波信号的脉冲宽度来调节占空比,从而达到调速的目的。
具体而言,PWM电机调速原理可以分为以下几个步骤:
1. 设定目标转速:通过设定控制器中的目标转速值,确定电机需要达到的转速。
2. 信号发生器:控制器中的信号发生器会生成一段固定频率的方波信号,频率一般是几十kHz至几百kHz。
3. 脉宽调制:通过调节方波信号的脉冲宽度,即调节方波中高电平的时间长度,来改变方波信号的占空比。
一般来说,脉冲宽度越长,占空比越高,电机转速也就越快。
4. 电机驱动:根据脉宽调制生成的方波信号,控制器会控制电机驱动电路,将相应的电流传递给电机。
5. 反馈控制:为了保持电机转速的稳定,通常会加入反馈控制系统。
通过测量电机转速并与设定的目标转速进行比较,控制器可以对脉宽调制的占空比进行自动调整,以使电机转速保持在设定范围内。
通过不断调整脉宽调制的占空比,控制器可以实现对电机转速的精确调节。
PWM调速原理广泛应用于许多领域,如机械传动、风扇调速、电动车辆等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12
Copyright © Http://
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
P89V51RD2的PWM功能应用
利用P89V51RD2的PWM功能,在P1.7口输出占空比为50%的PWM脉冲信 号。程序清单为:
MOV MOV MOV MOV SETB MOV MOV MOV CMOD,#04H; , TMOD,#02H , TL0,#20H , TH0,#20H , TR0 CCAPM4,#42H , CCAP4H,#127 , CCON,#40H , 阵列的CEX4的PWM功能 ;启用PCA阵列的 启用 阵列的 的 功能 ;设定PWM的占空比 设定 的占空比 ;启动PCA计数器工作 启动 计数器工作 初始化, 作为PCA阵列的计数脉冲来源 ;PCA初始化,选择 作为 初始化 选择T0作为 阵列的计数脉冲来源 ;T0初始化 初始化 ;设定PWM的周期 设定 的周期
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
P89V51RD2的PCA模块结构(共有5个模组CEX0-CEX4)
PCA的时钟基准 的时钟基准 PCA的5路模块 的 路模块
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
3
Copyright © Http://
17-1. PWM调速基本原理 调速基本原理
PWM脉冲驱动电路
PWM脉冲的占空 脉冲的占空 决定电机M1 比,决定电机 直流电机的速度控制中,需要对控制信号进行功率驱动或电气隔离, 的转速。 的转速。 以下为典型应用电路(负载为直流电机M1)。
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
10
Copyright © Http://
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
2
Copyright © Http://
17-1. PWM调速基本原理 调速基本原理
PWM信号输入 信号输入
光电隔离处理
功率驱动级
4
负载电源
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
Copyright © Http://
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
9
Copyright © Http://
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
四川工程职业技术学院
单片机应用技术课程电子教案
第 17 讲
PWM的调速原理与应用 小车调速 的调速原理与应用—小车调速 的调速原理与应用
Copyright ©
本讲主要内容: 本讲主要内容:
17-1. PWM调速基本原理 17-2. P89V51RD2的PWM功能模块结构与应用 17-3. 智能小车电机调速案例分析 17-4. 课后思考和实验准备
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
8
Copyright © Http://
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
CCAPMn-PCA模块比较 捕获寄存器(n=1、2、3、4、5) - 模块比较/捕获寄存器 模块比较 捕获寄存器( 、 、 、 、 )
位 符号 D7 D6 ECOMn D5 CAPPn D4 CAPNn D3 MATn D2 TOGn D1 PWMn D0 ECCFn
ECOMn 使能比较器。ECOMn=1时使能比较器功能。 使能比较器。 时使能比较器功能。 = 时使能比较器功能 CAPPn CAPNn MATn TOGn PWMn ECCFn 正捕获。 时使能上升沿捕获。 正捕获。CAPPn=1时使能上升沿捕获。 = 时使能上升沿捕获 负捕获。 时使能下降沿捕获。 负捕获。CAPNn=1时使能下降沿捕获。 = 时使能下降沿捕获 匹配。 计数值与模块的比较/捕获寄存器的值的匹配将 匹配。当MATn=1时,PCA计数值与模块的比较 捕获寄存器的值的匹配将 = 时 计数值与模块的比较 翻转。 计数值与模块的比较/捕获寄存器的值的匹配将 翻转。当TOGn=1时,PCA计数值与模块的比较 捕获寄存器的值的匹配将 = 时 计数值与模块的比较 脉宽调节模式。 脚用作脉宽调节输出。 脉宽调节模式。当PWMn=1时,使能 = 时 使能CEXn脚用作脉宽调节输出。 脚用作脉宽调节输出 使能CCF中断。使能寄存器CCON的比较 捕获标志 中断。使能寄存器 的比较/捕获标志 使能 中断 的比较 捕获标志CCFn,产生中断。 ,产生中断。
CCON-PCON计数器控制寄存器 - 计数器控制寄存器
位 符号 D7 CF D6 CR D5 D4 CCF4 D3 CCF3 D2 CCF2 D1 CCF1 D0 CCF0
CF:PCA计数器溢出标志。计数值翻转时该位由硬件置位。如果 : 计数器溢出标志。 计数器溢出标志 计数值翻转时该位由硬件置位。如果CMOD寄存器的 寄存器的 ECF位置位,CF标志可用来产生中断。CF位可通过硬件或软件置位,但只可通过软 位置位, 标志可用来产生中断 标志可用来产生中断。 位可通过硬件或软件置位 位可通过硬件或软件置位, 位置位 件清零。 件清零。 CR:PCA计数器运行控制位。该位通过软件置位,用来起动 : 计数器运行控制位。 计数器计数。 计数器运行控制位 该位通过软件置位,用来起动PCA计数器计数。该位 计数器计数 通过软件清零,用来关闭 计数器。 通过软件清零,用来关闭PCA计数器。 计数器 CCF0~CCF4:PCA模块 : 模块0~4中断标志。当出现匹配或捕获时该位由硬件置位。该位必 中断标志。 模块 中断标志 当出现匹配或捕获时该位由硬件置位。 须通过软件清零。 须通过软件清零。
PWM
高电平“ 高电平“1”
UP
低电平“ 低电平“0”
t T
T内平均电压
t/T:为PWM脉冲的 为 脉冲的 占空比, 占空比,决定平均 电压的大小! 电压的大小!
脉冲电压幅度
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
P89V51RD2的几个重要寄存器
CMOD-PCA计数器方式寄存器 - 计数器方式寄存器 CCON-PCON计数器控制寄存器 - 计数器控制寄存器 CCAPMn-PCA模块比较 捕获寄存器(n=1、2、3、4、5) - 模块比较/捕获寄存器 模块比较 捕获寄存器( 、 、 、 、 )
“0”占空比为: 占空比为: 占空比为 CCAPnH/256
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
T0运行、PWM使能、设定 运行、 使能、 运行 使能 设定PWM的占空比 的占空比
启动PCA计数器,输出PWM脉冲 计数器,输出 启动 计数器 脉冲
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
6
Copyright © Http://
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
PCA模块应用于PWM时的内部结构
占空比设定单元 PWM输出控制 输出控制
PWM比较 比较SFR 比较
PCA自加计数器 自加计数器 PWM信号输出 信号输出
5路模块 端口 路模块I/O端口 路模块
5
Copyright © Http://
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
P89V51RD2的PCA模块功能
捕获模式
软件定时
PCA 8位PWM 看门狗
电子发烧友 电子技பைடு நூலகம்论坛SiChuan Engineering Technical College-1959
Copyright © Http://
17-2. P89V51RD2的PWM功能模块结构与应用 的 功能模块结构与应用
P89V51RD2的PWM功能应用流程
CMOD初始化 初始化 PCA时钟源选择 时钟源选择 T0工作方式设定 工作方式设定 使用工作方式2 使用工作方式
00:fosc/6 : 01:fosc/12 : 10:定时器0溢出 :定时器 溢出 11:ECI/P1.2脚的外部时钟 : 脚的外部时钟
ECF:PCA使能计数溢出中断:ECF=1时,使能寄存器 : 使能计数溢出中断: 位的中断。 使能计数溢出中断 时 使能寄存器CCON CF位的中断。ECF=0时, 位的中断 时 禁止该功N能 禁止该功 能。
11
置位CCON寄存器的中断标志位 寄存器的中断标志位CCFn。 置位 寄存器的中断标志位 。 脚翻转。 使CEXn脚翻转。 脚翻转
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
PWM使能控制位 使能控制位
电子发烧友 电子技术论坛SiChuan Engineering Technical College-1959
7
Copyright © Http://
CMOD-PCA计数器方式寄存器 - 计数器方式寄存器
位 符号 D7 CIDL D6 WDTE D5 D4 D3 D2 CPS1 D1 CPS0 D0 ECF