catia 参数化设计与机构运动仿真
基于CATIA的齿轮参数化设计建模及运动仿真
基于CATIA的齿轮参数化建模及运动仿真作者:许昌军 指导老师:朱梅(安徽农业大学工学院 07机械设计制造及其自动化 合肥230036)摘要:文章介绍了运用参数化三维软件CATIA对渐开线直齿轮及斜齿轮进行参数化三维建模。
通过GSD模块中的fog方式生成参数方程建立渐开线,再通过镜像、剪切、特征阵列等命令建立齿轮轮廓,通过拉伸、开槽等命令建立渐开线齿轮三维模型,大大提高了设计人员的工作效率。
然后用建模的直齿轮创建直齿轮库,最后进入电子样机运动模块(KIN)对两啮合齿轮进行运动仿真及干涉分析。
关键词:参数化 CATIA 运动仿真 渐开线直齿轮1 引言本文基于CATIA 的三维建模环境, 设计开发了渐开线直齿轮参数化设计系统,建立零件的3D模型, 为渐开线直齿轮的传动、仿真、优化设计、有限元分析打下基础。
用户只需根据修改齿轮参数就可以生成新的渐开线直齿轮, 减少繁琐复杂的重复劳动, 从而大大提高设计效率。
1.1CATIA软件介绍CATIA(Computer Aided Tri-dimensional Interface Application) 是法国达索(Dassault Systemes)飞机公司于1975年开始发展起来的一整套完整的3D CAD/CAM/CAE软件,CATIA V5作为新一代的CATIA版本,提供更多的新功能,其界面更加人性化,基于Windows的操作界面非常友好,因此使得复杂、枯燥的设计工作变得轻松而又愉快。
CATIA以强大的曲面设计功能在飞机、汽车、轮船等设计领域享有很高的荣誉。
2 CATIA参数化设计分析基于特征参数化设计的关键是特征及其相关尺寸、公差的描述,包括数据特性描述、规则特性描述、关系特性描述。
数据特性描述包含特征的静态信息和制造特性;规则或方法属性定义特征特定的设计和制造特性;关系特性描述特征间的相互依赖关系或定义形状特征间的位置关系。
形状特征实际上是几何实体的无任何语义的结构化组合,形状特征月特征(语义特征)间是一对多的关系,这体现了特征的应用多视角性。
catia-第8讲 运动机构模拟

8.3.7 刚体接头(Planar Joint) 通过刚体接头,可以使两个零件成为一个刚体,成为刚 体后,两零件彼此间相对位置将不改变。 单击图标 ,弹出创建刚体接头对话框,内容如下: ( 1 ) Mechanism : 接 头 隶 属 于 哪 一 个 运 动 机 构 , 可 通 过”New Mechanism“按钮新建一个运动机构; (2)Joint Name:接头名称; (3)Part 1:第一个杆件; (4)Part 2:第二个杆件。 此接头不提供外部驱动功能,仅作为杆件的连接。
运动机构模拟
航空学院 20092009-2
目录
8.1 8.2 8.3 8.4 概述 运动机构模拟环境 运动机构创建 动态仿真
8.1 概述 对于产品的数字模型而言,进行准确的 运动状态分析,是十分基本且重要的功能。 在 数 字 模 型 运 动 机 构 模 拟 中 ( DMU Kinematics)单元中,用户可以依照运动学 原理,通过约束自由度的方式,建立机构, 并且分析机构的运动状态与移动轨迹。 此单元中提供数种基本的接头(Joint), 共用户建立机构,并且可以进行动态仿真, 记录运动情形,制作成影片播放。
8.3.11 点-曲面接头(Point Surface Joint) 通过点-曲面接头,可以让让一个点在曲面上移动,点 与曲面分别位于不同的零件上,如此零件(点)即可沿着曲 面移动。使用此接头时,点必须位于曲面上,因此需要先进 行好组装,再使用此接头。 单击图标 ,弹出创建点-曲面接头对话框,内容如下: ( 1 ) Mechanism : 接 头 隶 属 于 哪 一 个 运 动 机 构 , 可 通 过”New Mechanism“按钮新建一个运动机构; (2)Joint Name:接头名称; (3)Surface 1:第一个杆件上的曲面; (4)Point 1:第二个杆件上的点。 此接头不提供外部驱动功能,仅作 为杆件的连接。
CATIA参数化建模设计教程

CATIA参数化建模设计教程首先,打开CATIA软件并创建一个新的零件文件。
在工具栏上选择“文件”,然后选择“新建”。
在弹出窗口中选择“零件”并点击“确定”。
第二步是创建一个基础特征。
在CATIA中,基础特征是构成整个模型的基础。
常用的基础特征有创建草图、拉伸、旋转、倒角等。
选择“创建”工具栏上的“草图”按钮,然后在工作平面上绘制草图。
草图可以是二维的线条、圆、矩形等,在CATIA中,草图是创建三维模型的基础。
在草图绘制完成之后,选择“拉伸”工具栏上的按钮,然后选择要拉伸的草图和拉伸的距离。
拉伸可以将二维草图转化为三维模型。
接下来,我们可以使用更高级的功能来对模型进行操作。
一种常见的操作是进行旋转。
选择“旋转”工具栏上的按钮,然后选择要旋转的模型和旋转轴。
通过旋转可以将模型进行翻转、倾斜等操作。
此外,CATIA还提供了一些高级的功能,如倒角、剪切等。
倒角是用于给模型边缘添加圆角,使其更加平滑。
选择“倒角”工具栏上的按钮,然后选择要倒角的边和倒角的半径。
剪切功能可以用来从模型中移除一部分材料。
选择“剪切”工具栏上的按钮,然后选择要剪切的模型和剪切面。
最后,我们需要对模型进行参数化。
参数化是CATIA的一个重要特性,它可以使模型的尺寸和形状具有可调性。
在CATIA中,我们可以使用变量和公式来定义模型的尺寸和形状。
选择“参数”工具栏上的按钮,然后定义变量和公式。
通过调整变量的值,模型的尺寸和形状会相应地改变。
以上就是使用CATIA进行参数化建模设计的基础教程。
通过学习这些基本的操作,您可以使用CATIA来创建复杂的三维模型,并灵活地调整其尺寸和形状。
希望本教程对您有所帮助。
CATIA-V5-运动仿真分析
第16章 CATIA 运动分析16.1 曲轴连杆运动分析四缸发动机曲轴、连杆和活塞的运动分析是较复杂的机械运动。
曲轴做旋转运动,连杆左做平动,活塞是直线往复运动。
在用CATIA作曲轴、连杆和活塞的运动分析的步骤如下所示。
(1)设置曲轴、连杆、活塞及活塞销的运动连接。
(2)创建简易缸套机座。
(3)设置曲轴与机座、活塞与活塞缸套之间的运动连接。
(4)模拟仿真。
(5)运动分析。
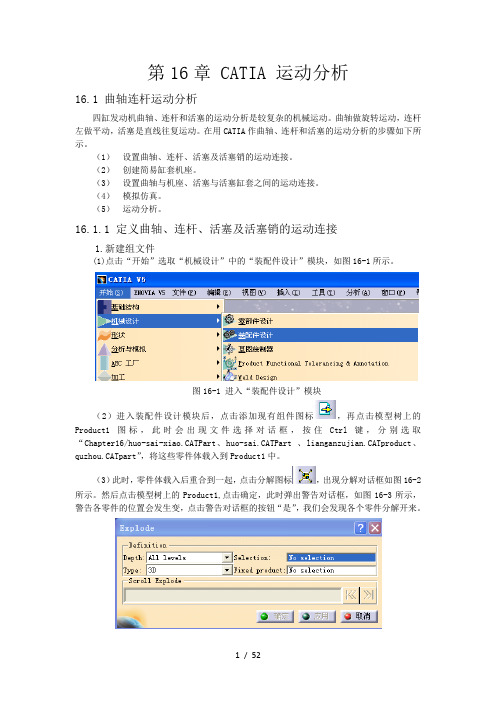
16.1.1 定义曲轴、连杆、活塞及活塞销的运动连接1.新建组文件(1)点击“开始”选取“机械设计”中的“装配件设计”模块,如图16-1所示。
图16-1 进入“装配件设计”模块(2)进入装配件设计模块后,点击添加现有组件图标,再点击模型树上的Product1图标,此时会出现文件选择对话框,按住Ctrl键,分别选取“Chapter16/huo-sai-xiao.CATPart、huo-sai.CATPart 、lianganzujian.CATproduct、quzhou.CATpart”,将这些零件体载入到Product1中。
(3)此时,零件体载入后重合到一起,点击分解图标,出现分解对话框如图16-2所示。
然后点击模型树上的Product1,点击确定,此时弹出警告对话框,如图16-3所示,警告各零件的位置会发生变,点击警告对话框的按钮“是”,我们会发现各个零件分解开来。
图16-2 分解对话框图16-3 警告对话框(3)由于连杆体零件是装配体,各部分之间存在约束,点击“全部更新”按钮,我们会发现连杆体组件恢复装配后的样子。
(4)点击“约束”工具栏中的“相合约束”图标,分别选择活塞销中心线及活塞孔中心线,如图16-4所示。
然后点击“约束”工具栏中的“偏移约束”图标,选择活塞销的一个端面及活塞孔一侧的凹下去细环端面,如图16-5所示,此时出现“约束属性”对话框,如图16-6所示。
将对话框中的“偏移”一栏改为“3.75mm”,点击“确定”按钮,完成活塞销端面和活塞内凹孔细环端面之间的偏移约束关系。
CATIADMU运动机构仿真教程

CATIADMU运动机构仿真教程CATIA是一款广泛应用于机械设计和制造领域的三维建模软件,而DMU(Digital Mock-Up)则是CATIA的一项重要功能,它能够在虚拟环境中对机械产品进行完整模拟和测量。
本篇文章将重点介绍如何使用CATIA DMU进行运动机构仿真。
首先,我们需要打开CATIA软件,并新建一个机械装配模型。
在装配模型中,我们可以选择和放置各种零件,然后使用约束关系将它们链接在一起,从而形成一个机械运动机构。
在确定机构设计之后,我们需要进行运动仿真来验证其运动性能和机构强度。
在装配模型中,选择"DMU Kinematics"工具栏中的"Module Creation"来创建一个新的运动模块。
然后,在"Product1"下创建一个新的机构,命名为"Motion"。
在"Motion"中选择"Insert",然后选择"Mechanisms"来添加运动机构零件。
接下来,我们需要选择合适的约束关系来定义机构的运动自由度。
在CATIA中,可以使用各种约束关系来模拟机构零件之间的运动关系,比如:旋转关节、滑动关节、齿轮齿条传动等。
例如,我们可以选择两个零件之间的旋转关节来定义它们之间的旋转运动。
在"Motion"中选择"Insert",然后选择"Rigid"关节来添加一个旋转关节。
然后选择两个需要链接的零件,按住Ctrl键并点击它们。
CATIA将自动在两个零件之间创建一个旋转关节。
设置旋转关节的旋转轴和角度范围后,即可完成约束的定义。
定义完所有的约束关系后,我们可以通过点击"Close"来关闭约束定义窗口。
然后选择"Motion Analysis"工具栏中的"Define Simulation"来定义仿真参数。
catia-第8讲 运动机构模拟
(4)Line 2:第二个杆件的方向; (5)Plane 1:第一个杆件需对齐的平面; (6)Plane 2:第二个杆件需对齐的平面; (7)Length driven:是否为外部驱动接头。
8.3.3 圆柱接头(Cylindrical Joint) 通过圆柱接头,可以让两个零件绕一轴转动,并沿此轴 向移动,这两个零件在结合处必须各有一个轴线。将两零件 的轴线重合,即成为具有两个自由度(旋转与平移)的圆柱 接头,这两个自由度各自独立,互不影响。 单击图标 ,弹出创建圆柱接头对话框,内容如下: ( 1 ) Mechanism : 接 头 隶 属 于 哪 一 个 运 动 机 构 , 可 通 过”New Mechanism 按钮新建一个运动机构; Mechanism“按钮新建一个运动机构; (2)Joint Name:接头名称; (3)Line 1:第一个杆件的方向;
8.3 运动机构创建 创建运动接头(Joint)是进行数字模型运动分 析的首要步骤。本单元共提供17种接头,可以模拟 大部分机构的运动方式,这些接头共分成四大类, 分别是: •实体接头:由实体零件所构成的接头。 •几何接头:利用几何图形(点、曲线、曲面)间的 关系所创建的接头。 •复合接头:为多自由度的运动接头,可以利用虚拟 的约束条件创建接头,不需要实际的几何关系。 •坐标对齐:利用对其坐标轴方式创建接头。
8.3.13 CV接头(CV Joint) CV接头由两个万向接头所构成,可以传递旋转运动,且 输入的转轴需与输出转轴平行。 单击图标 ,弹出创建CV接头对话框,内容如下: ( 1 ) Mechanism : 接 头 隶 属 于 哪 一 个 运 动 机 构 , 可 通 过”New Mechanism“按钮新建一个运动机构; (2)Joint Name:接头名称; (3)Spin 1:第一个杆件上的轴线; (4)Spin 2:第二个杆件上的轴线; (5)Spin 3:第三个杆件上的轴线。 此接头不提供外部驱动功能,仅作 为杆件的连接。
CATIA航空产品设计与制造课件:运动仿真

运动仿真
1
工程图基础
2
视图的创建
3
三维尺寸标注
CONTENTS
目
录
项目
1
运动机构仿真基础
进入运动机构仿真工作台 运动机构仿真结构树
运动机构仿真基础
1.1 概述
运动机构仿真基础
1.2进入运动机构仿真模块
运动机构仿真基础
用户界面:运动机构仿真
运动机构仿真基础
结构树:运动பைடு நூலகம்构仿真
运动机构仿真 3.1 运动机构仿真
运动机构仿真基础 3.2 定义固定部件
运动机构仿真基础 3.3 机构运动副的添加
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础 3.4 驱动命令的添加
运动机构仿真基础
运动机构仿真基础 3.5 机制修饰的添加
运动机构仿真基础 3.6 驱动命令添加规则
➢ 点和曲面副
运动副的创建
➢ 滑动曲线副
运动副的创建
➢ 滚动曲线副
运动副的创建
➢ 点、曲面副
运动副的创建
➢ 万向节副
运动副的创建
➢ CV关联副
运动副的创建
➢ 齿轮副
运动副的创建
➢ 齿条副
运动副的创建
01 02 03
➢ 课程导学 ➢ 课程录屏
项目
3
运动机构仿真
运动机构仿真一般步骤 运动机构副的添加 运动机构仿真
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础 3.7 使用命令或者规则进行机构仿真
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础 3.8 运动机构仿真的记录和回放
CATIA软件参数化设计方法

CATIA软件参数化设计方法CATIA是一款广泛应用于机械设计和制造领域的三维建模软件,它提供了丰富的功能和工具,帮助工程师们进行产品设计与开发。
其中,参数化设计是CATIA软件的一个重要特点,它能够帮助用户灵活地调整设计参数,提高设计效率和质量。
本文将介绍CATIA软件中的参数化设计方法,旨在帮助读者更好地利用该软件进行设计工作。
1. 参数化设计的概念参数化设计是指通过设定各项设计参数,并在设计过程中动态地调整这些参数值,从而实现设计的灵活性和变化性。
在CATIA软件中,参数化设计的核心思想是将设计过程中的几何尺寸、位置、约束等信息与参数关联起来,通过修改参数的值来实现设计的变化。
2. 参数化设计的优势参数化设计在CATIA软件中具有许多优势。
首先,它可以提高设计效率。
通过设定参数,设计师可以方便地调整尺寸和约束条件,快速生成各种不同的设计方案。
其次,参数化设计可以降低设计错误的风险。
通过将关键参数与几何特征相连接,当一个参数发生改变时,相关的几何特征也会相应更新,避免了人为错误。
此外,参数化设计还能够提高产品质量和可靠性,当设计需求发生变化时,只需要修改相关参数,而不需要重新设计整个产品。
3. 设计表格的应用在CATIA软件中,设计表格是参数化设计的一种常用工具。
设计表格是将设计参数和相关的几何特征以表格形式展示,通过修改表格中的数值来改变设计参数的值。
设计表格能够极大地简化参数化设计的流程,使设计师更加方便地控制设计参数。
设计表格还可以与其他设计模块相结合,如装配模块、仿真模块等,实现全面的参数化设计。
4. 规则建模的应用除了设计表格,CATIA软件还提供了规则建模功能,用于实现更复杂的参数化设计。
规则建模是指通过建立一组规则和条件,自动地生成和更新几何模型。
在规则建模中,设计师可以定义不同的参数和约束,并基于这些参数和约束建立模型。
当参数发生改变时,模型会自动更新,从而实现设计的变化。
规则建模可以高效地进行复杂的设计任务,提高设计效率和质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对其约束前
对其约束后
(6)对完成约束齿轮机构进行的干涉检验和校核最小间隙。
(7) 切换到运动仿真模块定义相应的运动副,与旋转副、齿 轮副等。
CATIA中提供的运动副
模拟齿轮 机构所定义的 运动副
(8)对齿轮机构进行运动仿真及生成运动动画
检查运动干涉,并定义运动属性 编辑运动,并生成运动动画
齿轮机构运动动画
一个模型内,对象的不同参数、相应规则和公式是相互 关联的!应用知识工程开发的设计,用户只需 “改变工程参 数或添加修改工程规则”,系统会根据这些工程规则对产品 几何参数计算,驱动生成要求的几何造型!
如,设计一个机床空心轴类零件,要求: 当 0mm<D<=30mm 时, d=0.7*D, h=30mm 当 30mm<D<=50mm时, d=0.7*D, h=50mm 当 50mm<D<=100mm时, d=0.7*D, h=70mm 其中,外径:D 内径:d 高:h
只要控制变量D,轴类零件相应的因 变量d和h,就会相应改变。这就是知本原理
3.1 虚拟装配 虚拟装配是将零件模型在总体坐标系中进行重新定位
的过程。它真实地模拟了产品三维装配过程。
在虚拟装配过程中可以发现设计制造中可能出现的问 题,在产品实际生产前采取措施,保证产品的一次性成功。
1.2 CATIA是Computer Aided Three-Dimensional Interface Application 的缩写
1.3 行业应用:
猎鹰
(1) 航空航天 (2) 汽车工业 (3) 造船工业 (4) 厂房设计 (5) 加工和装配 (6) 消费品
CATIA源于航空航天工业, 是业界无可争辩的老大
谢谢大家!
法国阵风
CATIA是汽车工业的事实标准,是欧洲、北 美和亚洲顶尖汽车制造商所用的核心系统
美国弗吉尼亚级攻击潜艇 CATIA 为造船工业提供了优秀的解决方 案,包括专门的船体产品和船载设备、 机械解决方案。
1.4 CATIA的操作界面
装配设计模块 DUM 运动机构模块
零件设计模块
2 参数化与知识工程设计
z=17 (常数变量)
压力角 a=20deg (角度变量)
模数
m=3mm (长度变量)
分度圆直径d=m*z=51mm
参数化为产品模型的可变性、可重用性、 并行设计等提供了手段,使设计人员可以利 用以前的模型方便地进行模型的重建,并可以在 遵循原设计意图的情况下,方便地改动模型,生成系列化产品!
2.2 知识工程设计原理
类的运动副或者通过自动转换机械装配约束条件而产生的运 动副,依照运动学的原理,以约束自由度的方式,建立机构, 对各种规模的机构进行运动状态模拟,通过运动干涉检验和 校核最小间隙来进行机构运动状态分析!它还可以通过与其他 DUM 产品的集成做更多复杂组合的运动仿真分析!
4 轮系的参数化建模与运动仿真
2.1 参数化设计原理
参数化设计是指设计对象模型的尺寸用变量及其关系表 示,而不要用具体的数值。
Z=17 m=3mm
Z=30 m=3mm
Z=30 m=4mm
建型前,需自定义模型所需的相应变量,如长度、角度或常数等变 量,且赋予相应变量要求的值。
若变量之间存在一定的函数关系,则可定义一函数。
例 齿数
3.2 运动仿真
运动仿真是指通过构建运动机构模型,分析其运动 规律,进行机构的干涉分析,跟踪零件的运动轨迹,分 析机构中零件的速度、加速度和作用力、反作用力和力 矩等,其分析结果可以修改零件的结构设计或调整零件 材料。
• 3.3数字模型运动分析 CATIA数字模型运动分析单元,通过调用已有的多个种
(1)自定义齿轮所需参数、公式和法则。
(2)根据上面的参数、公式和法则建立三维齿轮模型。 (3)根据创建好的单个齿轮,创建设计表。
(4)在设计表的基础上,创建齿轮零件库。
装配过程中,可直接调用零 件库内的零件模型,且根据需要 任意修改零件参数。
(5)在装配模块中,调入齿轮库中的零件,并对其进行相应约 束。
基于CATIA 机床零部件参数 化设计及机构运动仿真
1 CATIA 简介
2 参数化与知识工程设计 2.1参数化设计原理 2.2知识工程设计原理
3 虚拟装配与运动仿真的基本原理 3.1虚拟装配 3.2运动仿真 3.3数字模型运动分析
4 轮系的参数化建模与运动仿真
1 CATIA 简介 图标
1.1 CATIA是法国 Dassault System公司旗下的CAD/CAE/CAM一体化软件