简单Vissim仿真流程
vissim仿真教程

vissim仿真教程Vissim是一种交通仿真软件,可用于模拟和分析不同道路网络的交通流量和交通行为。
在本教程中,我们将介绍如何使用Vissim进行仿真,并提供一些常用的操作和技巧。
1. 创建新模型:在Vissim中,点击"File"菜单,然后选择"New"来创建一个新的模型。
输入模型的名称和文件路径,然后点击"OK"。
2. 添加道路网络:在新创建的模型中,点击"Network"菜单,然后选择"Add"来添加道路网络。
在弹出的窗口中,可以选择添加不同类型的道路和交叉口。
3. 设定仿真参数:在Vissim的"Simulation"菜单中,点击"Parameters"来设定仿真参数。
包括仿真时间、车辆生成率、车辆类型等。
4. 添加车辆类型:在Vissim的"Vehicle"菜单中,点击"Vehicle types"来添加不同类型的车辆。
可以设定车辆的速度、加速度和行为等参数。
5. 生成车辆流:在Vissim的"Vehicle"菜单中,点击"Generate vehicles"来生成车辆流。
可以选择生成的车辆类型、车辆流量和生成的时间段。
6. 运行仿真:在Vissim的"Simulation"菜单中,点击"Run"来开始仿真。
可以观察车辆在道路网络中行驶的情况。
7. 分析数据:在Vissim的"Evaluation"菜单中,可以进行对仿真数据的分析。
可以查看车辆的平均速度、交通流量等信息,并生成相应的报告。
8. 保存模型:在Vissim的"File"菜单中,点击"Save"来保存模型。
可以选择保存为.vissim文件或者其他格式的文件。
VISSIM初级教程(一)
设置冲突区域
31Байду номын сангаас
Front Gap和Rear Gap适用于交 叉,Safety Dist. Factor适用于汇 入
观察路径:介于[0,1]之间, 描述的是多少比例的支路车辆 需要考虑主路上接近的车辆路 径
27
6、设置冲突区域和优先规则
仿真发现冲突问题 冲突区域 设置优先规则 最小时间空挡 最小空间空挡
VISSIM路网建模
28
设置优先级原则
VISSIM路网建模
29
设置优化规则
设置冲突区域
30
前提:创建了车辆输入。 对路段有影响,影响了两个方向驾驶员通过
路口的计划。 四种类型:交叉、汇入、分叉 四种状态:green(有优先权), red(没有
VISSIM路网建模
24
3、定义车辆类别、车速分布、交通构成
车辆模型 车辆类型 车辆类别 车速分布 交通组成
VISSIM路网建模
25
4、交通流量输入,不含公交车流量
创建 设置(交通组成、时间段、精确输入或随机输入)
VISSIM路网建模
26
5、行驶路径
设置分配路径
粘贴、拷贝
VISSIM路网建模
VISSIM模型参数
主要有三类参数: (1)车辆特性; (2)驾驶行为; (3)道路行车环境。
12
(1)期望行驶速度; (2)仿真分辨率; (3)消失等待时间; (4)最小车头空距; (5)前视距离; (6)加速度、减速度; (7)前视车辆数; (8)安全停车距离等。 (9)其它交通构成参数。 === 导致饱和流量、行程时间 等核心参数出现较大偏差。
VISSIM交通仿真软件模型的构建
VISSIM交通仿真软件模型的构建VISSIM是一款交通仿真软件,它可用于模拟城市、高速公路、机场等多种场景下的交通流动与管理情况,为相关决策提供科学依据。
VISSIM的模型构建需要以下步骤:1. 建立基本结构:首先需要建立所需模型的基本结构,包括道路、交叉口、车辆、交通信号等,可以使用VISSIM自带的工具或按照自己需求自行设计。
2. 配置交通流参数:根据需要模拟的场景,设定模型的交通流率、流量、速度、密度、车道等参数,这些参数对模型的仿真效果有很大影响,需要合理设定。
3. 编辑路网:将道路、交叉口等基础结构拼接成完整的路网,多个路口之间需要使用连接器建立联系,确保车辆行驶时不会出现断层,同时也要规划道路宽度、车道数量等。
4. 装配车辆:VISSIM中可以选择不同类型的车辆进行模拟,需要设定车辆的尺寸、最大速度、加速度、刹车距离等参数,并按比例配置不同类型的车辆流量,以真实模拟道路上行驶的车辆。
5. 设计交通信号:交通信号是模拟交通流的核心因素,需要设定不同路段的信号灯状态、时间及可行性等,实现车辆行驶的安全顺畅。
以上五个步骤可以完成VISSIM模型的构建,但如果需要更精细的仿真效果,可以继续进行以下操作:6. 设定期望值:设定期望值,包括道路通行能力、停车流出时间、车道使用时间等,这些期望值不仅对路网模型有影响,也对车辆驾驶模型产生影响。
7. 调整灵敏度:可以根据实际场景调整模型的灵敏度参数,例如削减车辆的最大加速度或减速度等。
通过以上步骤,可以构建出贴合实际情况的VISSIM模型,实现真实的交通流仿真效果。
模型的优化需要不断地测试和调整,频繁地进行微调,以达到更接近现实的模型效果,为交通管理和设计提供准确、有效的模拟分析结果。
VISSIM交通仿真软件模型的构建

VISSIM交通仿真软件模型的构建VISSIM交通仿真软件是一款用于城市交通模拟的工具,可以帮助交通工程师和规划师评估不同交通策略的效果,预测交通流量和拥堵情况,优化道路设计和信号灯控制。
在使用VISSIM之前,需要进行模型的构建。
下面是VISSIM交通仿真软件模型的构建流程。
第一步:定义区域首先,需要定义仿真区域的范围和形状。
可以选择一个现有的地图文件或者手动绘制道路的形状。
VISSIM支持多种导入格式,包括AutoCAD、Shapefile、OpenStreetMap等。
选择合适的导入格式后,可以将地图导入到VISSIM中进行编辑和调整。
第二步:添加道路在定义好区域后,需要在地图上添加道路。
通过VISSIM的“道路编辑器”可以添加和编辑各种类型的道路元素,如车道、交叉口、地下通道等。
在添加道路时,需要确定车道数、道路宽度、道路类型等参数。
为了保证模拟的精度和真实性,需要参考现实中的交通规划和道路设计标准。
第三步:定义车辆和行人VISSIM可以模拟各种类型的车辆和行人,并且可以根据实际情况调整其行为和特性。
在模拟车辆时,需要设置车辆类型、颜色、速度、加速度等参数。
在模拟行人时,需要设置行人类型、速度、行走路径等参数。
可以通过VISSIM的“行为模型编辑器”来定义车辆和行人的行为和特性。
第四步:设置交通信号灯和控制在仿真中,交通信号灯和控制是必不可少的。
可以在VISSIM中设置各种类型的信号灯和控制器,并且可以调整它们的时序、周期和配时。
通过VISSIM的“信号灯编辑器”可以方便地设置信号灯和控制器的参数。
第五步:定义路口和交叉口第六步:保存和导出模型完成模型的设置后,需要保存和导出模型,在VISSIM中保存的模型可以随时打开和修改。
还可以将模型导出为各种格式的文件,如CSV、TXT、SHX等,以便在其他软件中使用和分析。
总结VISSIM交通仿真软件模型的构建需要经过多个步骤,包括定义区域、添加道路、定义车辆和行人、设置交通信号灯和控制、定义路口和交叉口、保存和导出模型等。
VISSIM车辆及行人交通仿真操作步骤
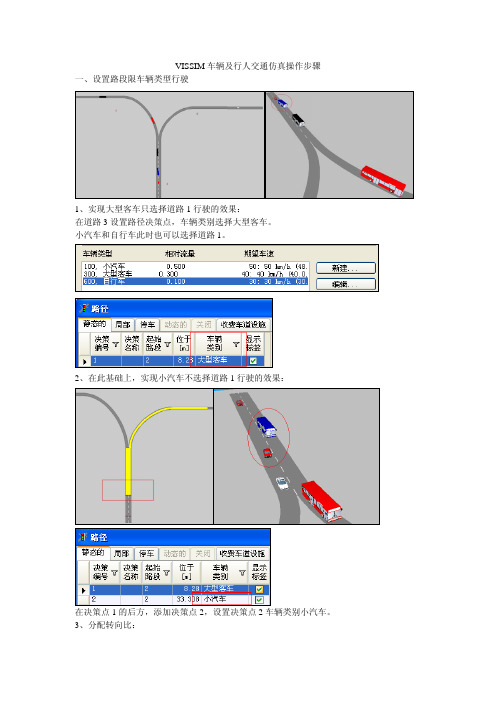
VISSIM车辆及行人交通仿真操作步骤一、设置路段限车辆类型行驶
1、实现大型客车只选择道路1行驶的效果:
在道路3设置路径决策点,车辆类别选择大型客车。
小汽车和自行车此时也可以选择道路1。
2、在此基础上,实现小汽车不选择道路1行驶的效果:
在决策点1的后方,添加决策点2,设置决策点2车辆类别小汽车。
3、分配转向比:
决策点的不同路径编号中,设置相对流量比,设置转向比。
4、控制决策点到连接器的距离
决策点到下一连接器之间要有一定距离,否则会报错。
二、公交站点车门开闭
1 菜单分布的公交车3D模式中设置车门位置和运用
2 先设置站台,再设置线路,保证站台是被激活的
3 设置线路发车间隔,并选定占用率大于1,保证有人下车,设置车辆在站点的下车方向
4 需要配置站台和候车区面域
5 上车行人路线的终点是到候车面域,下车区域的起点是在站台,下车路线的中间点不能让在候车面域上,否则还会回去上车。
6 候车区域面积不能太大
三、设置行人路径
1 根据底图绘制行人面域,扶梯是容易出现错误的环节,等完成面域的定义之后再绘制扶梯,障碍物对行人路径的选择产生影响,特别是与扶梯相交叉的情况会报错。
2 添加行人流量的时间区间应该在车辆发车之前
四、闸机设置
对于局部路径的设置,需要注意,主路径不能比局部路径还要具体,也就是说ABCD
A起点B中间点C中间点D终点
主路径可以是ABD 在B设置局部路径然后布局路径中可以包含C也可以直接到D
但是下列情况不允许主路径ABCD 而局部路径直接由B指向D。
这就发生一种误解,局部路径的客流会认为目的地是C,而局部路径不包含C而是指向了更远的点D。
简单Vissim仿真流程-文档资料

4)Lane Change:变换车道距离。车辆为了进入目标车道开始变换 车道的距离(距前方连接的距离)。
5)Gradient:坡度。连接单元的坡度。注意:连接单元的高程由其 两端的路段单元高程决定。
01.07.2020
1
VISSIM操作界面(图-1)
01.07.2020
2
2. 建立仿真路网
1.导入底图 为了建立路网的仿真模型,首先必须导入仿真对象的现状平面图或设
计平面图,且平面图必须带比例尺。下文以平面十字交叉口仿真研 究为例,建立路网的步骤如下: (1)通过Options→Background→Open导入平面设计图的bmp文 件。 (2)底图必需是BMP格式的图片。 (3)通过Options→Background→Scale按比例缩放图片。 (4)通过Options→Background→Orgin手工拖/拉背景图片。 (5)为了避免以后使用时再次导入相同图片的繁琐程序,用户可以 通过Options→Background→Parameters→Save保存当前图片信 息参数(保存文件格式为*.hgr)。
单元的起始高度和终点高度。
10)Opp.Direction:复制对向车道。 11)NO. of Lanes:复制的对向车道的车道数。 12)Animation:打开/关闭车道上的车辆显示。 13)Change Direct.:改变车道的方向。 14)Cost…:计算行驶成本,仅在安装了动态分布功能的模块时生 效。 15)Evaluation:确定评价路段时所用区段(segment)的单位长度。 16)Lane Closure…:车道关闭。可以禁止某类车辆在路段的某条车
vissim教程01
按钮凸显 路径决策点 路径决策点
决策编号
路径决策终点1 路径编号 两条路径的 相对车流比
路径决策点 路径决策终点2
1.5 冲突区的设置
删除出口匝道 添加相交道路
终点
按钮凸显
起点
1.5 冲突区的设置
添加相交道路流量
路段流量 按钮凸显 车辆构成黑色线段黑色来自段1.5 冲突区的设置
设置冲突区
竖直路段显红色, 表示需要让行 按钮凸显 主路显绿色,表 示具有优先权
《交通仿真实验》
第1章 VISSIM仿真基础
第1章 VISSIM仿真基础
实验目的:掌握交通仿真系统VISSIM基本功能的使用。 实验原理:本章以基本路段、出口匝道和平交路口为 例,练习这些基本的交通仿真操作。 难点提示: (1)道路连接。 (2)路径决策。 (3)检测器设置。
1.1 界面认识
1.5 冲突区的设置
仿真查看
上部工具栏 菜单栏
左侧工 具栏 视图区
状态栏
1.2 实现基本路段仿真
编辑基本路段
道路起点 车道数
道路终点 行为类型
1.2 实现基本路段仿真
为路段添加车流量
路段流量 按钮凸显 车辆构成
1.2 实现基本路段仿真
进行仿真
仿真运行速度
1.3 设置行程时间检测器
设置检测器
检测器起点
检测器终点 应设置位置 检测器终点 距离
按钮凸显
1.3 设置行程时间检测器
评价结果输出
选中行程时间
平均行程时间
1.4 道路的连接和路径决策
连接匝道 添加出口匝道
按钮凸显 按钮凸显 选择车道1 连接器起点 选中 匝道起点 连接器终点 选择车道1 匝道终点 输入5
Vissim仿真流程全解

Link-四车道
Link-三车道
2018/10/21
桂林电子科技大学
机电工程学院
11
方案一:三条车道连接三条,一条车道连接另外的一条
图-7 三条车道连接三条
2018/10/21 桂林电子科技大学 机电工程学院 12
VISSIM仿真流程
1.VISSIM操作界面介绍
VISSIM的操作界面分为5个区域(如图-1): 标题栏:显示仿真程序名称、文件名称、版本号。 菜单栏:设置、调整参数。 状态栏:第一部分:当前鼠标坐标。 第二部分:网络编辑模式中,显示当前选择的对 象信息;仿真过程中,显示仿真时间。 第三部分:网络编辑模式中,显示编辑提示信息 滚动条:上下翻滚视图。 工具栏:图形及模块工具 。
2018/10/21
桂林电子科技大学
机电工程学院
6
图-3 Link参数对话框
2018/10/21
桂林电子科技大学
机电工程学院
7
(2)定义Connector(连接)单元 Connector(连接)单元参数设置对话框中包括以下各项内容: 1)Name:连接的名称。 2)在From Link和To Link两栏中可以选择起始路段和终止路段对应 连接的车道(车道数必须匹配)。 3)Emerg.Stop:紧急停车距离。要进入目标车道的车辆如果在车流 量很大的情况下难以进入目标车道,它将在Emerg.Stop控制的地点 停车,等候间隙变道。 4)Lane Change:变换车道距离。车辆为了进入目标车道开始变换 车道的距离(距前方连接的距离)。 5)Gradient:坡度。连接单元的坡度。注意:连接单元的高程由其 两端的路段单元高程决定。 6)Points:Splines(连接曲线)的插入点数。选择Spline可以设 置Points的插入点数,点数越多,连接曲线越平滑;用户也可以用 鼠标右键在连接单元上添加节点。 7)大多数情况下,Direction并不起任何作用。只有当车辆被指定 了转向以后(用按纽 指定),该选项才需要设置。未被指定转向 的车辆只通过Direction为All的连接单元。 8)车道关闭(Lane Closure)的功能与路段单元相同,都是用来禁 止某种车辆通行的。 9)Cost…和Evaluation…的功能与路段(Link)中介绍的相同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.VISSIM操作界面介绍
VISSIM的操作界面分为5个区域(如图-1): 标题栏:显示仿真程序名称、文件名称、版本号。 菜单栏:设置、调整参数。 状态栏:第一部分:当前鼠标坐标。
第二部分:网络编辑模式中,显示当前选择的对象信 息;仿真过程中,显示仿真时间。
第三部分:网络编辑模式中,显示编辑提示信息 滚动条:上下翻滚视图。 工具栏:图形及模块工具 。
28.09.2020
.
1
VISSIM操作界面(图-1)
28.09.2020
.
2
2. 建立仿真路网
1.导入底图 为了建立路网的仿真模型,首先必须导入仿真对象的现状平面图或设
计平面图,且平面图必须带比例尺。下文以平面十字交叉口仿真研 究为例,建立路网的步骤如下: (1)通过Options→Background→Open导入平面设计图的bmp文 件。 (2)底图必需是BMP格式的图片。 (3)通过Options→Background→Scale按比例缩放图片。 (4)通过Options→Background→Orgin手工拖/拉背景图片。 (5)为了避免以后使用时再次导入相同图片的繁琐程序,用户可以 通过Options→Background→Parameters→Save保存当前图片信 息参数(保存文件格式为*.hgr)。
道上通行。(可用于设置公交专用道、小汽车专用道等)
28.09.2020
.
6
图-3 Link参数对话框
28.09.2020
.
7
(2)定义Connector(连接)单元 Connector(连接)单元参数设置对话框中包括以下各项内容: 1)Name:连接的名称。 2)在From Link和To Link两栏中可以选择起始路段和终止路段对应 连接的车道(车道数必须匹配)。 3)Emerg.Stop:紧急停车距离。要进入目标车道的车辆如果在车流 量很大的情况下难以进入目标车道,它将在Emerg.Stop控制的地 点停车,等候间隙变道。 4)Lane Change:变换车道距离。车辆为了进入目标车道开始变换 车道的距离(距前方连接的距离)。 5)Gradient:坡度。连接单元的坡度。注意:连接单元的高程由其 两端的路段单元高程决定。 6)Points:Splines(连接曲线)的插入点数。选择Spline可以设置 Points的插入点数,点数越多,连接曲线越平滑;用户也可以用鼠 标右键在连接单元上添加节点。 7)大多数情况下,Direction并不起任何作用。只有当车辆被指定了 转向以后(用按纽 指定),该选项才需要设置。未被指定转向的 车辆只通过Direction为All的连接单元。 8)车道关闭(Lane Closure)的功能与路段单元相同,都是用来禁 止某种车辆通行的。 9)Cost…和Evaluation…的功能与路段(Link)中介绍的相同。
(1)定义Link(路段) 1)Link(路段)单元参数设置对话框中包括以下各项内容: 2)number:路段编号。 3)Name:路段名称。 4)Type:路段类型。 5)Link Length:路段长度。 6)NO. of Lanes:路段车道数
28.09.2020
.
5
7)Lane Widths:车道宽度。 8)Gradient:路段坡度。 9)Height:路段高度,仅在3D显示时生效,左右两格分别代表路段
28.09.2020
.
3
导入VISSIM中的十字交叉口平面设计底图(图-2)
28.09.2020
.
4
2.建立路网的方法 VISSIM使用两个基本的组件(Link 和 Connector)来描述一个路网。 Link(路段):有方向性,是矢量。定义路段时需要输入该路段的车 道数、车道宽度、坡度等。按纽 用于建立和移动Link。按纽 用于编 辑Link。 Connector(连接):用于连接同方向Link中的车道,每条 Connector 可以同时连接一条或几条车道。 VISSIM通过Link和Connector来描述一条连续的路径,也可以描述整 个路网。
单元的起始高度和终点高度。
10)Opp.Direction:复制对向车道。 11)NO. of Lanes:复制的对向车道的车道数。 12)Animation:打开/关闭车道上的车辆显示。 13)Change Direct.:改变车道的方向。 14)Cost…:计算行驶成本,仅在安装了动态分布功能的模块时生 效。 15)Evaluation:确定评价路段时所用区段(segment)的单位长度。 16)Lane Closure…:车道关闭。可以禁止某类车辆在路段的某条车
28.09.2020
.
15
(3)进口道和出口道的连接
该交叉口的西进口共有四条车道,用两个Link来表示。每 一个Link代表一个车道组。所谓车道组(lane group)是 指具有完全相同功能的车道组合。注意车辆在Link之间是 不能变换车道的,只能在同一Link内的不同车道之间才可 以变换车道。该交叉口的北出口道用一个Link来表示,因 为这两条车道具有完全相同的功能。 西进口的左转车道和北出口道用一个Connector连接,需 要注意的是这里的Connector与西进口道的Link连接段应 尽量短。
Link-四车道
Link-三车道
28.09.2020
.
11
方案一:三条车道连接三条,一条车道连接另外的一条
图-7 三条车道连接三条
28.09.2020
.
12
图-8 一条车道连接另外一条
28.09.2020
.
13
方案二:两条Connector分别连二条车道
图-9Βιβλιοθήκη 28.09.2020.
14
图-10
28.09.2020
.
8
图-4 link连接对话框
28.09.2020
.
9
3.路网建立实例
(1)进口道路段的处理
路段上如对车道功能无特殊划分(如设公交专用道),可用一条多车 道的Link来表示,如果两条车道功能完全不相同,并且车辆不能相互 变换车道,最好用两条Link来表示。
意图 图
进 口 道 车 道 设 置 示
-5
Link-直行车道 Link-专用左转车道
Connector-1 Connector-2
三条车道
图-
28.09.2020
.
10
(2)车道展宽/缩减渐变段的处理
实际的道路上经常有车道增加和缩减的情况。车流在这种渐变段上的跟 车行为、变换车道行为都与正常路段不同,更为复杂。VISSIM中仍 然是通过Link和Connector单元来模拟,因此若处理不当会造成仿真 的严重失真。 图-6 车道展宽渐变段示意图