二阶系统串联校正的根轨迹
基于根轨迹法的串联校正
基于根轨迹法的串联校正注意:1)一般了解根轨迹校正方法。
若指标为时域指标采用;方法简单,容易理解;虽然计算均为代数计算,但是太繁杂,一般不采用。
2)重点掌握频率法的串联校正。
若指标为频域指标采用。
例5 已知待校正系统的单位反馈系统的开环传递函数为0()(0.51)K G s s s =+试设计串联校正环节,使得校正后系统()c G s 1) 静态速度误差系数;150v K s -≥2) 超调量; %25%σ≤3) 调节时间。
2s t s ≤解:1) 求取主导极点位置由,得,这里取。
%e 100%20%σ=≤0.4ζ≥0.5ζ=取,由,得,这里取。
0.02∆=42s nt ζω=≤4n ω≥4n ω=则闭环主导极点1,22n s j j ζωω=-±=-±2)将系统传递函数化成零极点形式:02()(0.51)(2)K K G s s s s s ==++011(0)(2)(20)(22)30(21),0,1,2s s j j l l π-∠--∠+=-∠-+--∠-++=-≠+=±± 不满足则进行动态校正。
3) 动态校正——相当于频率法中超前校正-----------------------------------------------------以下是讨论----------------------------------------设校正装置,则此时。
111()()c cc c c s z G s k s p -=-'1112()()(2)()c c c Kk s z G s s s s p -=+-注意:校正前系统阶数为2,现在系统阶数为3。
因此,会出现两种情况:A: 校正后系统的阶数不变。
——加入的校正装置后系统的一个极点会与一个零点相互抵消。
这里令(为什么不,那就白加校正装置了)12c s z s -=+11c c s z s p -=-则,此时,阶数不变。
17春北交自动控制原理在线作业二
北交《自动控制原理》在线作业、单选题(共15道试题,共30分。
)1. 最小相位系统的开环增益越大,其()•A. 振荡次数越多B. 稳定裕量越大C. 相位变化越小D. 稳态误差越小正确答案:2. 常用的比例、积分与微分控制规律的另一种表示方法是()。
A. PDIB. PDIC. IPDD. PID正确答案:3. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个()A. 比例环节B. 微分环节C. 积分环节D. 惯性环节正确答案:4. 时域分析的性能指标,哪个指标是反映相对稳定性的()A. 上升时间B. 峰值时间C. 调整时间D. 最大超调量正确答案:5. A、B是高阶系统的二个极点,一般当极点A距离虚轴比极点B距离虚轴大于()时, 分析系统时可忽略极点A。
A. 5倍B. 4倍C. 3倍D. 2倍正确答案:6. 设一阶系统的传递G(s)=7/(s+2),其阶跃响应曲线在t=0处的切线斜率为()A. 7B. 2C. 7/2D. 1/2正确答案:7. 系统和输入已知,求输出并对动态特性进行研究,称为()A. 系统综合B. 系统辨识C. 系统分析D. 系统设计正确答案:8. 系统已给出,确定输入,使输出尽可能符合给定的最佳要求,称为()A. 最优控制B. 系统辨识C. 系统分析D. 最优设计正确答案:9. 3从0变化到+ R时,延迟环节频率特性极坐标图为().A. 圆B. 半圆C. 椭圆D. 双曲线正确答案:10. 在用实验法求取系统的幅频特性时,一般是通过改变输入信号的()来求得输出信号的幅值。
A. 相位B. 频率C. 稳定裕量D. 时间常数正确答案:11. 某典型环节的传递函数是G (s)=1/Ts,则该环节是()A. 比例环节B. 惯性环节C. 积分环节D. 微分环节正确答案:12. 二阶振荡环节乃奎斯特图中与虚轴交点的频率为()A. 谐振频率B. 截止频率C. 最大相位频率D. 固有频率正确答案:13. 实际生产过程的控制系统大部分是()A. 一阶系统B. 二阶系统D. 高阶系统正确答案:14. 若已知某串联校正装置的传递函数为GC (s)=(s+1)/(0.1s+1),则它是一种()A. 相位超前校正B. 相位滞后校正C. 相位滞后一超前校正D. 反馈校正正确答案:15. 相位超前校正装置的奈氏曲线为( )。
2012chen讲过的基于根轨迹法的串联分析法校正例题超详细步骤,仅供参考!一般掌握 .pdf

基于根轨迹法的串联校正注意:1)一般了解根轨迹校正方法。
若指标为时域指标采用;根轨迹校正方法简单,容易理解;虽然计算均为代数计算,但是太繁杂,一般不采用。
2)若指标为频域指标,或者可以转化为频域指标,一般尽可能采用基于频率法的串联校正。
重点掌握基于频率法的串联校正。
例5 已知待校正系统的单位反馈系统的开环传递函数为0()(0.51)KG s s s =+试设计串联校正环节()c G s ,使得校正后系统 ① 静态速度误差系数150v K s -≥; ②超调量%25%σ≤; ③调节时间2s t s ≤。
解:1) 求取闭环主导极点位置由%e 100%20%σ=≤,得0.4ζ≥,这里取0.5ζ=。
取0.02∆=,由42s nt ζω=≤,得4n ω≥,这里取4n ω=。
则闭环主导极点1,22n s j j ζωω=-±=-±2)将系统传递函数化成零极点形式:02()(0.51)(2)K KG s s s s s ==++0011(0)(2)(20)(22)12090(21),0,1,2s s j j l l π-∠--∠+=-∠-+-∠-+=--≠+=±±不满足则进行动态校正。
---以下只是讨论,实际做题时直接省掉即可------ 3) 动态校正—相当于频率法中超前校正 设校正装置111()()c cc c c s z G s k s p -=-,则此时'1112()()(2)()c c c Kk s z G s s s s p -=+-。
注意:校正前系统阶数为2,现在系统阶数为3。
因此,会出现两种情况:A: 校正后系统的阶数不变。
——加入的校正装置后系统的一个极点会与一个零点相互抵消。
这里令12c s z s -=+(为什么不11c c s z s p -=-,那就白加校正装置了) 则12c z =-,此时,'112()()c c Kk G s s s p =-阶数不变。
根轨迹法校正
1 j1.73
按例1,先确定超前网络
c 60 超前角
取 zc 1 ,
得 pc 4
s 1 Gc2 s s4
s1处, 23.8 k* 在
k* k 4 4 1.49
取希望的
k' 5
k' 5 1 3.3 k 1.49
留余量 4 则 0.25
2. 由给定性能指标,确定希望主导 极点(动态性能满足时,希望主导极点 在轨迹上或附近)
* 3. 计算主导极点处增益 k 或需增 大 k 的倍数
4. 计算网络的
值,且留余量
5. 计算zc
s zc G ,构成网络, c s s p c
6. 检验,不满足时,改变余量,重新
设计。
k* 例2:设开环传递函数 Gc s ss 1s 4
s 4.95
s1 处增益 k1* =30.4 在
6. 检验,画根轨迹
1.2 kk 1.84 4 4.95
* 1
k * s 1.2 Gc s Gs ss 1s 4s 4.95
可见:在轨迹 s1, 2 附近。
注意:未校正系统具有距虚轴较近、 开环复数极点时,或系统开环极点 虽均为实数,但过分接近原点,以 及系统具右半平面开环极点时,均 不宜采用串联超前校正。 利用超前校正,其最大超前角 一般取 20 ~ 60
0.5 要求:经校正 t s 10
k 5 1
s
解:1. 画出根轨迹
2. 0.5 ,t s 10 有 n 0.66 s1,2 0.33 0.57 j
可见: s1 在轨迹上或附近,满足动态性能 3. 但在 s1 处的 k * 0.66 0.9 2.66 1.58
控制系统仿真与CAD课程设计(二阶系统串联校正装置设计与分析)

设计二:二阶系统串联校正装置设计与分析一设计题目设某被控系统的传递函数G(s)如下:)2()(+=s s K s G二设计要求选用合适的方法设计一个串联校正装置K(s),使闭环系统的阶跃响应曲线超调量%20%<σ,过渡过程时间)(5.1s T s ≤,开环比例系数)/1(10s K v ≥,并分析串联校正装置中增益、极点和零点对系统性能的影响。
三设计内容1. 设计方法:采用根轨迹校正工具进行串联校正2. 设计步骤:[1] 启动SISO 设计器在MATLAB 命令窗口中直接键入sisotool 命令,启动SISO Design Tool[2] 控制系统结构图选择串联校正系统结构图:控制器C 与控制对象G 串联,在引入单位负反馈构成闭环系统[3] 输入系统模型当选定系统的结构后,为所设计的线性系统输入模型数据。
根据设计要求:开环比例系数)/1(01s K v ≥ 即 20102)(lim 0≥≥==→k ks sG k s v 得 取k=40, 传递函数)2(40)(+=s s s G在控制器C 取值为常数1的情况下,绘制此单位负反馈线性系统的根轨迹图、系统的伯德图以及闭环阶跃响应曲线10101010Frequency (rad/sec)Open-Loop Bode E ditor (C)Root Locus E ditor (C)Real AxisStep ResponseTime (sec)A m p l i t u d e由阶跃响应曲线可以看到,此时在没有串联校正装置情况下,超调量%20%60%>=σ,过渡过程时间)(5.1)(5.3s s T s >=达不到指标要求。
[4] 系统设计在完成线性系统数据的输入之后,在SISO Design Tool 窗口中,对控制器C 进行设置。
利用增加和删除零极点的设置菜单,对控制器C 的零极点任意设置。
同时对控制器C 的增益进行设置。
[5] 系统分析在系统设计完成后,需要对其做进一步分析。
基于根轨迹法的串联超前校正器的设计

图 1 有源超前 校正器
此校正器的传递 函数为 : G
。
,其 中, =
>l ,T=RC . 2
徼
l ) 瓜 G f c =
.
【 收稿 日期】 0 1 1 1 2 1—1- 2
【 作者简介】 白莉 (97 ) 张 17 - ,女 ,山西原 平人 ,忻 州师 范学院物理 电子 系讲师 ,硕 士 ,从事 电子技术应用研究。
来 决定 . 系统 要 求实 现 的动 态性 能指 标计 算 出 系统 的期 望 闭环 极 点 ,如 果 系统 的根 轨 迹 没有 通过 期 望 的 根据
闭环极点 ,说 明性能指标不符合要求 ,这时可以通过引人新的开环零点和极点来改变根轨迹的走 向,如果
引 入 的开环 零 极点 合适 ,就可 以使 根 轨迹经 过 期望 的 闭环极 点 ] . 3 串联 超前 校 正参数 计 算
i =1 =l
当 S满 足相 角方 程 时 ,必然 可 以找到 一个 K, 的值 ,使 其 同 时满 足幅 值方 程 . 如果 系统 实 现预 期性 能 指标 对应 的两个 主 导极 点 - : 满 足相 角 方程 ,就 必须 引入 校 正装 置 增 加新 的 ,不 S
开环零点和开环极点来改变根轨迹的走 向. 如果采用 的是串联超前校正 ,其传递 函数为 G () +  ̄ s c :l cT
KH 一 , z )
系统 的开 环传 递 函数 的一般 表 达式 为 G () 。 :
, =lBiblioteka 兀 一 , P) ,=l
其根 轨 迹 的幅 值方 程为
1
—
其 轨 相 方 为 ∑ 一t ∑Zs P) + k 18 (=,,) 根 迹的 角 程 Z一 ( j= ( +)0 02 . ) — 2 1。 1… ,
二阶系统参数与根轨迹

二阶系统是控制系统中的一种重要模型,其数学表达式为dy/dt = c*y + u,其中c为二阶系统的阻尼系数,u为输入。
根轨迹图是二阶系统的一个重要特性,它展示了系统参数c与系统稳定性和性能之间的关系。
参数c决定了系统的阻尼程度和周期性。
当c>0时,系统是稳定的,且随着c的增加,系统的阻尼会减小,周期性也会减小,即系统的性能会变好。
当c<0时,系统是不稳定的,且随着c的减小,系统的周期性会增加,即系统的性能会变差。
根轨迹图是二阶系统的动态特性在s平面上的投影。
通过观察根轨迹图,可以了解系统的稳定性和性能。
根轨迹图的形状和位置取决于系统的参数c。
当c增加时,根轨迹图向-1/s轴移动,这意味着系统的阻尼和周期性减小,性能变好。
当c减少时,根轨迹图向虚轴移动,这意味着系统的稳定性受到影响,周期性增加,性能变差。
通过分析根轨迹图,可以确定控制系统设计的最佳参数。
例如,可以通过控制输入信号的频率和幅度来优化系统的性能。
在控制系统设计中,根轨迹图还可以用于确定反馈控制器的参数,以实现系统的稳定性和性能优化。
总之,二阶系统的根轨迹图是系统动态特性的重要表示,它提供了关于系统稳定性和性能的直观信息。
通过理解根轨迹图的形成和特点,可以更好地设计和优化控制系统,从而实现更好的动态性能和稳定性。
因此,对根轨迹图的理解和分析对于控制系统设计具有重要意义。
自控原理II实验采样系统校正报告
采样系统校正一、实验目的1.掌握用连续系统设计方法对采样系统进行设计。
2.掌握采样系统中采样周期的选择方法。
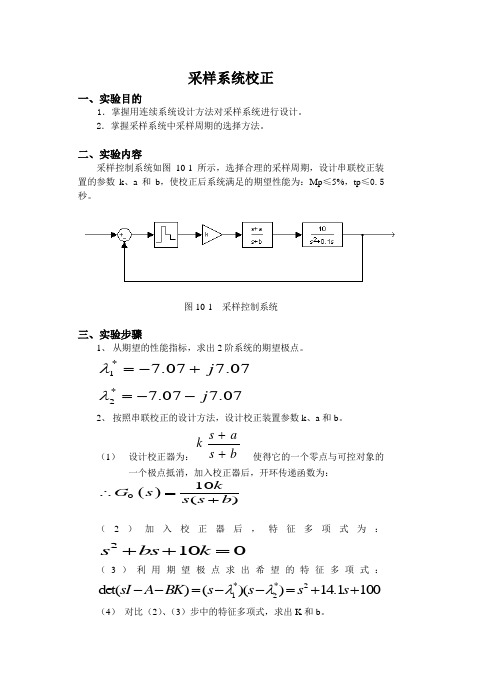
二、实验内容采样控制系统如图10-1所示,选择合理的采样周期,设计串联校正装置的参数k 、a 和b ,使校正后系统满足的期望性能为:Mp ≤5%,tp ≤0.5秒。
图10-1 采样控制系统三、实验步骤1、 从期望的性能指标,求出2阶系统的期望极点。
*17.077.07j λ=-+*27.077.07j λ=--2、 按照串联校正的设计方法,设计校正装置参数k 、a 和b 。
(1) 设计校正器为:s a ks b ++ 使得它的一个零点与可控对象的一个极点抵消,加入校正器后,开环传递函数为:()010()kG s s s b ∴=+(2)加入校正器后,特征多项式为:2100s b s k ++=(3)利用期望极点求出希望的特征多项式:**212det()()()14.1100sI A B K s s s s λλ--=--=++(4) 对比(2)、(3)步中的特征多项式,求出K 和b 。
K=10 a=0.1 b=14.13、在MA TLAB环境下,对校正后的系统性能进行仿真验证。
四、实验结果:T:0.5ST:0.1ST:0.01ST:0.005S结论:采样周期设置得越小,超调量越小,峰值时间也越小,五、思考题1、将连续系统的设计方法用于采样系统设计,应注意那些问题?注意采样周期的选择。
2、设计采样系统的校正网络,可采用那些方法?如果性能指标以单位阶跃响应的峰值时间、调整时间、超条量、阻尼比等时域特征量给出时,一般采样根轨迹校正。
如果性能指标以稳定裕量的形式给出,采用频率法校正。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕 业 设 计 (论 文)设计(论文)题目:_______ ______________________________________________________单 位(系别):______________________ 学 生 姓 名:______________________ 专 业:______________________ 班 级:______________________ 学 号:______________________ 指 导 教 师:______________________ 答辩组负责人:______________________填表时间: 20 年 月 重庆邮电大学移通学院教务处编 号:____________审定成绩:____________摘 要对于一个系统,首要的要求就是系统的绝对稳定性。
在系统稳定的情况下,要求系统的动态性能和稳态性能要好,这些可以通过设计校正来达到期望的性能标准。
本文用劳斯判据判断系统的稳定性,用根轨迹法改造系统的根轨迹,使系统达到要求的性能指标。
从根轨迹图可以看出,只调整增益往往不能获得所希望的性能。
通过增加新的(或者消去原有的)开环零点或者开环极点来改变原根轨迹的走向,得到新的闭环极点,从而使系统可以实现给定的性能指标来达到系统的设计要求。
本文对原系统采用串联校正的方法改善系统的性能指标,其步骤如下: 1.作原系统的根轨迹图,并根据动态期望指标推出满足条件的ζ、n ω。
2.检验动态性能。
计算出主导极点,分析开环增益。
3.检验稳态性能。
计算开环增益,判断校正方式。
4.计算校正装置,设置校正装置并检验。
5.作校正后的根轨迹图,判断校正后的系统性能。
最终使系统在输入为()5r t t =+时的静态指标ss e ≤0.2,同时使动态期望指标p σ≤ 5%;s t ≤ 5sec 。
并且用MATLAB 对原系统和校正后的系统分别进行仿真,对比其根轨迹以及在指定输入下的输出,分析其是否达到要求。
【关键词】根轨迹法 串联校正 MALTAB 仿真 动态性能 稳态性能ABSTRACTFor a system, the first requirement is that the absolute stability of the system. Under the stability of the system, the requirements of the system dynamic performance and steady-state performance is better, they can achieve the desired performance standards by designing correction.In this paper, Rolls criterion to judge the system stability, root locus method using root locus transformation of the system, allowing the system to achieve the performance required. Can be seen from the root locus, often can not only adjust the gain to obtain the desired properties. By adding new (or eliminate the original) open-loop or open-loop pole zero change to the original root locus, get new closed-loop poles, so that the system can achieve a given performance indicators to meet the design requirements of the system.In this paper, the system uses a series of original calibration method to improve system performance, the following steps:1. The root locus for the original system, and introduced to meet the conditions of the dynamic expectations index.2. Verify that the dynamic performance. Calculate the dominant pole, analyze open-loop gain.3. Verify that the steady-state performance. Open-loop gain is calculated to determine the correction mode.4. Calculate the correction means, the correction means and test set.5. corrected for root locus determining system performance after correction.Eventually make the system too static index ≤0.2 input while enabling dynamic ex pectations index ≤ 5%; ≤ 5 sec. And the original system using MATLAB and corrected system simulation respectively, compared to its root locus, and output in the specified input, analyze whether it meet the requirements.目录前言在现代科学技术众多领域中,自动控制技术的地位变得越来越重要。
自动控制,就是在没有人参与的情况下,通过控制器或者控制装置来控制机器或者设备等物理装置,使机器设备的受控物理量按照希望的规律变化,达到控制目的。
在当今的社会,自动控制已经深入到各个领域,无处不在,与人类的生活息息相关。
在工业方面,对于冶金、化工、机械制造等生产过程中遇到的各种物理量,包括温度、流量、压力、厚度、张力、速度、位置、频率、相位等,都有相应的控制系统。
在此基础上通过采用数字计算机还建立起了控制性能更好和自动化程度更高的数字控制系统,以及具有控制与管理双重功能的过程控制系统。
在农业方面,水位自动控制系统、农业机械的自动操作系统中都有自动控制的身影。
在军事技术方面,自动控制可应用在各种类型的伺服系统、火力控制系统、制导与控制系统等。
在航天、航空和航海方面,自动控制应用于导航系统、遥控系统和各种仿真器以及各种形式的控制系统。
此外,自动控制技术已经渗入到办公室办公、图书管理、交通管理以及日常家务等方面。
不仅如此,随着控制理论和控制技术的发展,自动控制将在更多的领域中发挥作用,包括生物、社会、医学、生态、经济等所有领域。
经过20多年的发展,中国工业自动控制系统装置制造行业取得了不错的成绩。
随着现代应用数学新成果的推出和电子计算机的应用,为适应宇航技术的发展,自动控制理论跨入了一个新阶段——现代控制理论。
主要研究具有高性能,高精度的多变量变参数的最优控制问题,主要采用的方法是以状态为基础的状态空间法。
目前,自动控制理论还在继续发展,正向以控制论,信息论,仿生学为基础的智能控制理论深入。
本文针对二阶系统的性能指标满足实际工业要求,对系统进行分析校正,改变系统的静态性能和稳态性能,使系统的各项性能达到工业指标。
第一章二阶系统的概述第一节自动控制系统的发展历史及应用自动控制经过了三个不同的阶段。
从简单到复杂,从量变到质变。
第一阶段:经典控制论阶段(20世纪50年代末以前)。
早在古代,古人发明的指南车就应用了反馈的原理。
1788年,离心式飞摆控速器也应用了反馈的思想……1948年,W.R.Evans提出了系统的根轨迹分析法,进一步完善了频域分析法。
1954年,钱学森出版了《工程控制论》,全面总结了经典控制理论,标志着经典理论的成熟。
第二阶段:现代控制论阶段(50年代末期到70年代初期)。
这个时候,输入可以是多输入,多输出系统,系统可以是线性或者非线性,定常或时变的,单变量与多变量,连续与离散系统,并运用极点配置,状态反馈,输出反馈的方法,解决最优化控制、随机控制、自适应控制问题。
1959年,极大值原理创立,滤波器理论被提出。
1960年卡尔曼对系统采用状态方程描述方法,提出了系统的能控性、能观测性……第三阶段:大系统理论阶段与智能控制理论阶段(70年代初期到现在)。
主要以时域法为主,通过大系统的多级递阶控制、分解-协调原理。
分散最优控制和大系统模型降阶理论,解决大系统的最优化。
本文采用根轨迹法对系统进行分析校正,而根轨迹法是一种求特征根的简单方法,具有直观的特点,利用系统的根轨迹可以分析结构和参数已知的闭环系统的稳定性和瞬态响应特性,还可分析参数变化对系统性能的影响。
在设计线性控制系统时,可以根据对系统性能指标的要求确定可调整参数以及系统开环零极点的位置,因此根轨迹法已在控制系统的分析与设计中得到广泛的运用。
根轨迹法的运用与设计,能分析开环增益(或者其他参数)对系统行为的影响;能分析附加环节对系统性能的影响;能用于设计系统的校正装置。
利用根轨迹法直观的分析系统的稳定性,各项性能指标,并且能设计出较好的校正装置。
最终使得系统的各个性能指标达到我们期望的数值。
第二节自动控制系统简介一、系统说明Ⅰ型2阶系统就是开环传递函数中只能提出一个积分环节,并且其特征多项式的最高阶数为2。
Ⅰ型2阶系统有跟踪速率信号的能力,但是在跟踪过程中,只能实现有差跟踪。
能通过加大开环增益来减小误差,但是不能消除它。
图1.1 二阶系统结构框图二、系统环节介绍(一)积分环节输出量与输入量成积分关系的环节,称为积分环节。
其特点:输出量与输入量的积分成正比例,当输入消失,输出保持不变,具有记忆功能;积分环节受到扰动自身无法达到稳定。
(二)一阶惯性环节一阶惯性环节的微分方程是一阶的,且输出响应需要一定时间后才能达到稳态值,因此称为一阶惯性环节。
其特点:输出信号对输入信号的响应存在惯性(输入信号阶跃加入后,输出信号不能突然变化,只能随时间增加逐渐变化)。