液位自动控制系统工作原理
水箱液位自动控制系统设计
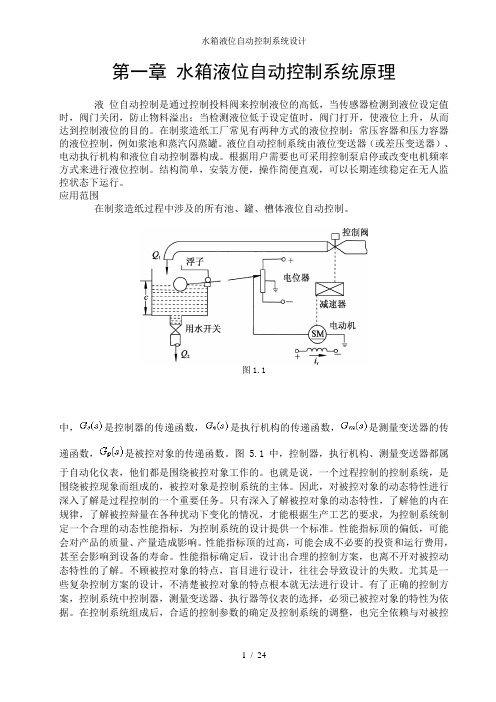
第一章水箱液位自动控制系统原理液位自动控制是通过控制投料阀来控制液位的高低,当传感器检测到液位设定值时,阀门关闭,防止物料溢出;当检测液位低于设定值时,阀门打开,使液位上升,从而达到控制液位的目的。
在制浆造纸工厂常见有两种方式的液位控制:常压容器和压力容器的液位控制,例如浆池和蒸汽闪蒸罐。
液位自动控制系统由液位变送器(或差压变送器)、电动执行机构和液位自动控制器构成。
根据用户需要也可采用控制泵启停或改变电机频率方式来进行液位控制。
结构简单,安装方便,操作简便直观,可以长期连续稳定在无人监控状态下运行。
应用范围在制浆造纸过程中涉及的所有池、罐、槽体液位自动控制。
图1.1中,是控制器的传递函数,是执行机构的传递函数,是测量变送器的传递函数,是被控对象的传递函数。
图5.1中,控制器,执行机构、测量变送器都属于自动化仪表,他们都是围绕被控对象工作的。
也就是说,一个过程控制的控制系统,是围绕被控现象而组成的,被控对象是控制系统的主体。
因此,对被控对象的动态特性进行深入了解是过程控制的一个重要任务。
只有深入了解被控对象的动态特性,了解他的内在规律,了解被控辩量在各种扰动下变化的情况,才能根据生产工艺的要求,为控制系统制定一个合理的动态性能指标,为控制系统的设计提供一个标准。
性能指标顶的偏低,可能会对产品的质量、产量造成影响。
性能指标顶的过高,可能会成不必要的投资和运行费用,甚至会影响到设备的寿命。
性能指标确定后,设计出合理的控制方案,也离不开对被控动态特性的了解。
不顾被控对象的特点,盲目进行设计,往往会导致设计的失败。
尤其是一些复杂控制方案的设计,不清楚被控对象的特点根本就无法进行设计。
有了正确的控制方案,控制系统中控制器,测量变送器、执行器等仪表的选择,必须已被控对象的特性为依据。
在控制系统组成后,合适的控制参数的确定及控制系统的调整,也完全依赖与对被控对象动态特性的了解。
由此可见,在控制工程中,了解被控制的对象是必须首先做好的一项工作。
水箱液位自动控制系统工作原理

水箱液位自动控制系统工作原理引言水箱液位自动控制系统是一种常见的自动化控制系统。
本文将对水箱液位自动控制系统的工作原理进行详细的介绍和探讨。
其中包括传感器的使用、控制器的设计以及执行器的操作等方面。
传感器水箱液位传感器是水箱液位自动控制系统的核心组件之一。
传感器通过测量水箱中的液位高度来获取相应的液位信息。
常见的液位传感器包括浮球式液位传感器和压力式液位传感器。
浮球式液位传感器浮球式液位传感器利用浮球的浮力来测量液位。
当液位上升时,浮球会随之上升;当液位下降时,浮球也会下降。
传感器通过检测浮球的位置来确定液位的高度。
压力式液位传感器压力式液位传感器通过测量液体对传感器的压力来确定液位的高度。
当液位上升时,液体对传感器的压力增加;当液位下降时,压力减小。
传感器通过检测液体对传感器的压力变化来确定液位的高度。
控制器控制器是水箱液位自动控制系统的另一个重要组成部分。
控制器根据传感器提供的液位信息,判断水箱液位是否在设定范围之内,然后发出相应的控制信号。
PID控制器PID控制器是一种常用的控制器类型。
它根据当前的偏差以及偏差的变化率来调整输出信号,使得系统的输出能够稳定在设定值附近。
PID控制器由比例项、积分项和微分项组成,分别对应于当前偏差、累积偏差和变化率。
控制信号控制信号是控制器向执行器发送的命令信号,用于控制水箱液位的变化。
通过调整控制信号的大小和方向,控制器可以实现水箱液位的自动上升和下降。
执行器执行器是控制水箱液位的关键部件。
执行器根据控制器发出的命令信号,调整水箱进水和排水的流量,从而实现水箱液位的自动控制。
电动阀门电动阀门是一种常用的执行器类型。
它通过电动机驱动阀门的开闭,从而调节水箱的进水和排水流量。
控制器通过控制电动阀门的开度,使得水箱液位保持在设定范围之内。
水泵水泵也是一种常见的执行器类型。
它通过驱动液体流动来调节水箱的液位。
控制器根据液位信息,调整水泵的工作状态,从而实现水箱液位的自动控制。
霍尔传感器液位控制系统工作原理
霍尔传感器液位控制系统工作原理一、引言液位控制系统是工业生产中常见的一种自动控制系统,它用于监控和控制液体的水平。
而霍尔传感器是一种常用的液位传感器,它基于霍尔效应原理,能够准确地测量液体的水平状态。
本文将介绍霍尔传感器液位控制系统的工作原理。
二、霍尔效应原理霍尔效应是指当电流通过一块导体时,垂直于电流方向的磁场作用下,导体两侧会产生电压差。
在霍尔传感器中,导体的材料通常是半导体材料,如硅。
当液体的水平状态改变时,液体与霍尔传感器之间的距离会发生变化,进而改变磁场的影响范围和强度。
这样,霍尔传感器两侧产生的电压差也会随之改变。
三、霍尔传感器液位控制系统的工作原理1. 传感器安装将霍尔传感器固定在容器的侧壁上,使其与液体接触。
霍尔传感器的位置应根据液位的变化范围进行调整,以确保传感器能够准确地测量液体的水平状态。
2. 信号检测当液体的水平发生改变时,霍尔传感器两侧产生的电压差会发生变化。
这个电压差信号会被传感器的电路接收和检测。
3. 信号处理接收到电压差信号后,传感器的电路会对信号进行放大和滤波处理。
放大是为了增强信号的强度,使其更容易被后续的电路处理;滤波则是为了去除噪声干扰,提高信号的准确性和稳定性。
4. 数据转换经过信号处理后,电路会将电压差信号转换为数字信号。
这样,液位的信息就被转化为数字形式,便于后续的控制和显示。
5. 控制反馈将转换后的数字信号与设定的液位阈值进行比较。
当液位超过或低于设定阈值时,控制系统会根据需要启动或停止相应的控制设备,以实现液位的调节和控制。
四、优点和应用领域1. 优点霍尔传感器液位控制系统具有以下优点:- 精度高:霍尔传感器能够提供准确的液位测量结果,其精度可以达到毫米级别。
- 反应快:霍尔传感器的响应速度非常快,能够实时监测液体的水平状态。
- 耐久性强:霍尔传感器采用半导体材料制成,具有较好的耐久性和抗腐蚀性。
- 安装方便:霍尔传感器的安装非常简单,只需将其固定在容器壁上即可。
水箱液位自动控制系统工作原理
水箱液位自动控制系统工作原理
1水箱液位自动控制系统
水箱液位自动控制系统是一种控制水箱液位的自动化控制系统,它包括一个液位探测器、一个液位计算机、水箱液位控制装置和一个加水控制装置。
1.1液位探测器
液位探测器是系统的最重要的组成部分,它可以实时测量水箱中液位和水温,并将其实时数据发送到液位计算机。
1.2液位计算机
液位计算机负责接收液位探测器发送过来的实时温度和液位数据,并对其进行分析,计算出水箱当前的液位状态和液位变化趋势,并将运算结果发送给控制装置。
1.3水箱液位控制装置
水箱液位控制装置接收到液位计算机发送过来的水箱当前液位状态和液位变化趋势,根据实际情况确定是否需要加水,并根据设定的液位变化趋势来决定加水的次数和加水量。
1.4加水控制装置
加水控制装置接收来自水箱液位控制装置发送过来的控制信号,根据设定次数和加水量,控制加水泵启动停止,最终实现自动控制水箱液位,保持水箱液位的稳定。
水箱液位自动控制系统通过液位探测器实时测量水箱液位和温度,液位计算机对测量数据进行分析,水箱液位控制装置根据设定液位趋势确定是否需要加水,加水控制装置根据设定次数和加水量控制加水泵启动停止,实现了水箱液位的稳定控制。
全自动液位控制器原理
全自动液位控制器原理引言液位控制是工业自动化系统中的重要环节之一,涉及到许多行业的生产过程。
为了实现对液位的准确控制,全自动液位控制器应运而生。
本文将介绍全自动液位控制器的原理,包括其工作原理、主要组成部分以及应用场景等内容。
一、工作原理全自动液位控制器主要通过传感器、控制器和执行器等组成部分实现对液位的监测和控制。
其工作原理如下:1. 传感器:全自动液位控制器采用不同类型的传感器来监测液位,常见的传感器包括浮球传感器、电容传感器和超声波传感器等。
这些传感器能够将液位信号转化为电信号,供控制器进行处理。
2. 控制器:控制器是全自动液位控制器的核心部分,负责接收传感器的信号并进行处理。
控制器根据预设的液位范围和液位变化速率等参数,通过算法计算出控制信号,并输出给执行器。
3. 执行器:执行器根据控制器输出的信号,对液位进行调节。
常见的执行器包括电磁阀、电动调节阀和泵等。
执行器通过开关控制液体的进出,以达到控制液位的目的。
二、主要组成部分全自动液位控制器主要由以下几个组成部分构成:1. 传感器:传感器是实现液位监测的关键部件,根据不同的液体特性和工作环境选择合适的传感器。
浮球传感器适用于液位范围较小且液体相对纯净的场景,电容传感器适用于液位范围较大的场景,而超声波传感器适用于需要非接触式测量的场景。
2. 控制器:控制器负责接收传感器的信号,并根据预设的参数进行处理。
控制器通常采用微处理器或PLC等设备,具备较强的运算和控制能力。
控制器还可根据实际需要实现液位报警、自动排放和数据记录等功能。
3. 执行器:执行器根据控制器输出的信号,对液位进行调节。
执行器的选择与液体的性质、流量要求和工作环境等因素有关。
电磁阀适用于控制液体的进出,电动调节阀适用于实现精确的流量控制,而泵适用于液体的输送和循环等场景。
三、应用场景全自动液位控制器广泛应用于许多行业的生产过程中,主要包括以下几个方面:1. 水处理:在水处理行业中,全自动液位控制器可用于水池的液位控制、水泵的自动启停以及水质监测等。
液位控制系统的工作原理及应用
液位控制系统的工作原理及应用1. 液位控制系统的概述液位控制系统是一种用于测量、监控和控制液体在容器中的高度的系统。
它主要通过测量液体的高度来调节液体的进出量,以保持液体在设定的液位范围内。
2. 液位控制系统的工作原理液位控制系统通常由以下几个组成部分组成:传感器、控制器和执行器。
下面是液位控制系统的工作原理:2.1 传感器液位传感器是液位控制系统中最关键的部分之一。
它通常通过物理或电子方法来测量液体的高度,并将测量结果转化为电信号。
常见的液位传感器包括浮球传感器、电容传感器和超声波传感器等。
2.2 控制器控制器是液位控制系统中的中枢部件,负责接收传感器的信号并进行处理和判断。
根据设定的液位范围,控制器可以发出控制信号来调节液体的进出量。
控制器还可以通过显示屏或指示灯等方式提供工作状态和警告信息。
2.3 执行器执行器是液位控制系统中用于调节液体进出量的设备。
常见的执行器包括阀门、泵和搅拌器等。
根据控制器的信号,执行器可以自动打开或关闭阀门、启动或停止泵等操作,从而实现液位的控制。
3. 液位控制系统的应用3.1 工业生产液位控制系统在工业生产中广泛应用。
例如,在化工过程中,液位控制系统可以用于调节液体的进出量,保持反应器中恰当的液位,从而确保反应的稳定性和安全性。
在石油行业,液位控制系统可以用于储罐中的油品或化学品的管理,提高生产效率和安全性。
3.2 水处理液位控制系统在水处理领域也有广泛的应用。
例如,在污水处理厂,液位控制系统可以用于调节混凝剂的投加量,控制沉淀池的液位,以确保废水的处理效果。
在供水系统中,液位控制系统可以用于监控水库或水井的液位,并自动控制水泵的启停,保持水源的稳定供应。
3.3 智能家居随着智能家居的发展,液位控制系统也开始在家庭生活中得到应用。
例如,在水器中,液位控制系统可以用于检测水位,防止水箱溢出。
在洗衣机中,液位控制系统可以用于监测洗衣机内的水位,确保洗衣的效果和节约水资源。
液位控制系统原理

液位控制系统原理
液位控制系统主要是根据液体容器中的液位变化来实现自动控制。
其基本原理是通过传感器或测量设备对液位进行实时监测,并将监测到的数据传输给控制器进行处理。
控制器根据设定的液位目标值和系统的工作要求,对执行机构进行控制,从而实现液位的稳定控制。
具体而言,液位控制系统的原理包括以下几个关键步骤:
1. 传感器测量液位:液位控制系统中,通常使用传感器来测量液体容器中的液位。
常见的液位传感器有浮子式液位传感器、压力传感器、毛细管传感器等。
传感器会将液位信息转换为电信号,以便后续的控制。
2. 信号处理与转换:液位传感器输出的电信号可能需要进行处理和转换,以适应控制器的要求。
通常使用信号调理器或模拟转换器对信号进行放大、滤波或线性化处理,并将其转化成数字信号,以便后续的控制器处理。
3. 控制器处理信号:控制器接收传感器发送的信号,并进行处理。
其主要任务是将测量到的液位与预设的目标液位进行比较,并根据控制策略确定控制命令。
控制器通常具有PID控制算
法或其他控制算法,并可以根据实际情况进行参数调整。
4. 执行机构控制:控制器根据处理结果,生成相应的控制信号,控制执行机构以实现液位的调节。
执行机构根据控制信号的不同,可以是开关阀门、调节阀、泵或其他调节装置。
通过对执
行机构的控制,液位控制系统可以实现液位的自动调节。
总体来说,液位控制系统利用传感器监测液位并将信号转换为控制器可处理的形式,控制器根据设定的液位目标值进行处理,并通过控制信号控制执行机构,从而实现液位的稳定控制。
这种液位控制系统常应用于化工、制药、水处理、液体储存等领域。
液位自动控制系统分析
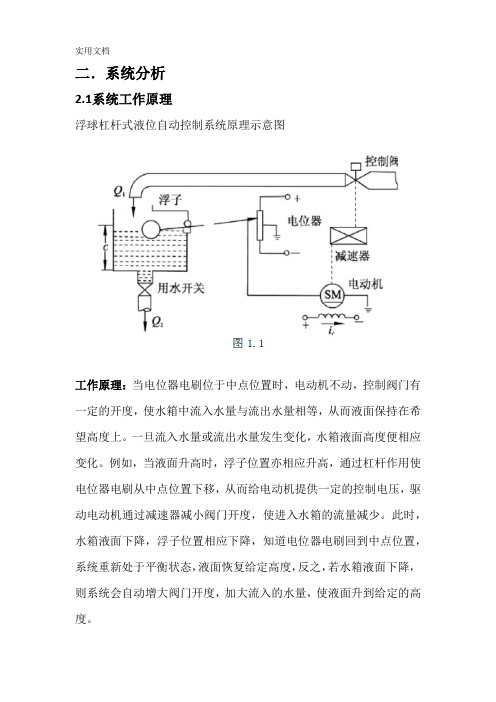
二.系统分析2.1系统工作原理浮球杠杆式液位自动控制系统原理示意图工作原理:当电位器电刷位于中点位置时,电动机不动,控制阀门有一定的开度,使水箱中流入水量与流出水量相等,从而液面保持在希望高度上。
一旦流入水量或流出水量发生变化,水箱液面高度便相应变化。
例如,当液面升高时,浮子位置亦相应升高,通过杠杆作用使电位器电刷从中点位置下移,从而给电动机提供一定的控制电压,驱动电动机通过减速器减小阀门开度,使进入水箱的流量减少。
此时,水箱液面下降,浮子位置相应下降,知道电位器电刷回到中点位置,系统重新处于平衡状态,液面恢复给定高度,反之,若水箱液面下降,则系统会自动增大阀门开度,加大流入的水量,使液面升到给定的高度。
2.2系统分解水位自动控制系统由浮子,杠杆,直流电动机,阀门及水箱控制部分构成。
根据不同的需要可以对各部分进行不同的设计。
该系统结构简单,安装方便,操作简便直观,可以长期连续稳定在无人监控状态下运行。
液位控制系统原理方框图如下所示:图22.3.数学模型2.3.1浮子、杠杆、电位计(比例环节)浮球杠杆测量液位高度的原理式U o=U总b∆ℎal式中Uo为电位计的输出电压,U总为电位计两端的总电势,b a⁄为杠杆的长度比,∆ℎ为高度的变化,l为电位计电阻丝的中点位置到电阻丝边缘的长度。
则:G1(s)=K12.3.2微分调理电路(微分环节)由于水面震荡,导致浮子不稳定,在电位计的输出电压与电动机的输入端之间接一个微分调理电路,对输入的电压进行调理传递函数为G2(s)=K2s2.3.3电动机(惯性环节)查资料知电动机的传递函数:G3(s)=K3Ts+12.3.4减速器(比例环节)这是一个比例环节,增益为减速器的减速比。
故,传递函数为G4(s)=K42.3.5控制阀(积分环节)这是一个积分环节,故,传递函数为G5(s)=K5s2.3.6水箱(积分环节)这是一个积分环节,实际液位Y是流入量Q in与流出量Q out的差值∆Q对时间t的积分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液位自动控制系统工作原理
液位自动控制系统的工作原理是通过传感器感知液位的变化,并将这些信号转换成电信号,然后由控制器对这些信号进行处理和分析,最终通过执行机构调节流量或液位来控制液位的变化。
具体而言,液位自动控制系统通常包括以下几个基本组成部分:
1. 传感器:常用的液位传感器有浮子传感器、电容式传感器、超声波传感器等。
传感器可以感知液位的变化,并将其转换成电信号。
2. 控制器:控制器接收传感器发出的电信号,并对其进行处理和分析。
根据预设的控制策略和设定值,控制器计算出相应的控制命令。
3. 执行机构:执行机构根据控制器发出的控制命令,控制液体的流量或液位。
常见的执行机构包括阀门、泵等。
4. 反馈回路:为了确保控制的准确性,液位自动控制系统通常还需要建立反馈回路。
反馈回路将实际液位信息反馈给控制器,控制器可以根据实际液位与设定值之间的差异进行调整,以实现闭环控制。
整个液位自动控制系统的工作原理是不断地感知、处理和调控液位的变化,以使液位保持在设定值附近。
通过控制液体流量
或液位,液位自动控制系统可以实现液位的稳定、准确的控制,从而满足工业生产的需求。