构建基于XPC目标的实时仿真测试系统
matlab real time(Xpc target)使用详解

下位机成功进入xpc
XPC Target流程
2、启动下位机与上位机进行连接
2.2 插入U盘启动下位机
右下角显示的为下位机自己的IP地址
上位机打开命令行,ping下位机ip检 测是否连通
XPC Target流程
2、启动下位机与上位机进行连接
2.2 插入U盘启动下位机
在matlab中命令行输入 xpc 检测是否 连接成功
Xpc Target (Matlab Real Time)
快速原型 讲解
XPC Target简介
xPC Target是MathWorks公司开发的一 个基于RTW体系框架的实时目标系统产 品,可将标准的PC兼容机转变为一个实 时系统,来实现控制系统或DSP系统的 快速原型化、硬件在回路中的测试和系 统半实物仿真等功能。随着目前PC兼容 机的普遍使用,从而xPC Target提供了 一种造价低廉的、性能较高的并且便捷 的实时应用系统。 xPC Target采用了宿主机-目标机的技术 实现途径,即“双机”模式,宿主机和目 标机可以是不同类型的计算机,两者之 间通过以太网或串口实现通讯。
XPC Target流程
2、启动下位机与上位机进行连接
2.2 插入U盘启动下位机 按F2或F12或delete加入bios
Bios界面
XPC Target流程
2、启动下位机与上位机进行连接
2.2 插入U盘启动下位机
启动选项 选择之前制作的启动U盘进行启动, 注意不要选择UEFI模式,选择 legacy模式
上位机虚拟被控对象程序
下位机显示
XPC Target流程
3、上位机编写程序烧入下位机
实际物理设备程序程序
XPC Target流程
搭建基于labview的xPC目标实时仿真系统控制平台

搭建基于labview的xPC目标实时仿真系统控制平台颜艳腾;叶周;张锐【摘要】介绍了实时控制系统平台xPC Target,并且研究了如何在xPC目标环境下构建实时仿真测试系统。
研究了xPC目标的C API接口编程及其API函数以及labview如何调用DLL动态链接库,建立了基于labview的xPC宿主机控制及遥测平台,该平台用于某卫星的姿轨控半物理仿真系统的地面验证,为其提供了功能强大并富于人性化的人机交互接口,实际应用表明该控制平台完全可以实现对xPC目标机程序的控制。
%The xPC Real-Time simulator was intruduced. Studied that how to build a real-time simulation testing system in xPC target environment. Studied the xPC target C API programming interface and API functions and how to call DLL dynamic link library. Established the control and telemetry platform of xPC host PC based on labview.The platform is used to a satellite attitude and orbit control ground verification system .and it can provide a powerful and rich computer interaction interface. The experiment and application show that this control platform can control the program of xPC Target completely.【期刊名称】《电子设计工程》【年(卷),期】2015(000)003【总页数】4页(P69-71,75)【关键词】实时仿真;xPC目标;API函数;labview【作者】颜艳腾;叶周;张锐【作者单位】中国科学院上海微系统与信息技术研究所,上海 200050; 上海微小卫星工程中心上海 201203;中国科学院上海微系统与信息技术研究所,上海200050; 上海微小卫星工程中心上海 201203;中国科学院上海微系统与信息技术研究所,上海 200050【正文语种】中文【中图分类】TN927+.2xPC目标是MathWorks公司提供和发行的一个基于RTW体系框架的附加产品,可将Intel80x86/Pentium计算机或PC兼容机转变为一个实时系统,而且支持许多类型的I/O设备,用户只需安装相关的软件、一个编译器和I/O设备板,就可将一个PC兼容机作为实时系统,来实现控制系统或DSP系统的快速原型化、硬件在回路中的测试和配备实时系统的功能[1-2]。
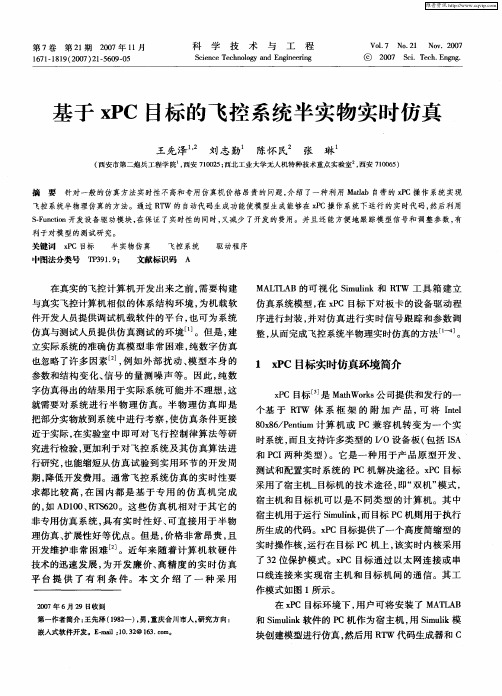
基于xPC目标的串口数据实时通信
I / O
0, D/ A,D1 0
C
磋伴
宿 主机 ( H o s t P C )
~蝤L T L AB
S i mu l i n k R TW
目标机 ( T a r g e t P C )
X P c目标
实时内捶 ( 3 2 位保护横 式 )
.
t r a ns mi s s i on me t ho d wa s p r opo s e d.Th e c om m un i c a t i on mo du l e u s i ng t h i s me t ho d wa s t e s t e d on t he El e c t r o— — hy dr a ul i c Fa t i g ue Te s t i n g Ma c hi n e,w h i c h c a n s e nd d a t a pe r mi l l i s e c o nd.T e s t s p r ov e t ha t me s s a ge t r a ns nl i s s i o n r a t e o f t he p r opo s e d me t hod o n g e ne r d PC s e r i a l po r t c a n be 8 00 00 b i t / s . Ke y wo r ds :xPC t a r g e t ;s e r i a l t r a n s mi s s i on; l a r ge a mo un t o f da t
I S SN 1 0 0 9 - 3 0 4 4
E-m a i h i nf o@dn z s . ne t . er l
无人机飞行控制半实物仿真系统设计与实现

ISSN 1002-4956 CN11-2034/T实验技术与管理Experimental Technology and M a n a g e m e n t第38卷第3期202丨年3月Vol.38 N o.3Mar. 2021D O I:10.16791/j.c n k i.s j g.2021.03.031无人机飞行控制半实物仿真系统设计与实现吕永玺,屈晓波,史静平(西北工业大学自动化学院,陕西省飞行控制与仿真技术重点实验室,陕西西安710072 )摘要:为保证无人机飞行试验的安全性,提升无人机飞控系统设计的可靠性,自主研发了无人机飞行控制半实物仿真系统。
结合准确的无人机6自由度非线性数学模型和x P C实时系统模块模拟生成无人机飞行状态信息,根据地面站控制指令、传感器故障模注人指令解算获得不同飞行模式和飞行状态下的舵面偏转量,实现了实时系统闭环反馈控制,并驱动舵面偏转检验控制系统的响应速度。
该系统不仅能验证飞控系统的逻辑性和实时性,而且借助虚拟现实技术和航迹地图显示,具备在线整定控制律参数的功能。
该系统模块化程度高,相关硬件和软件对无人机平台和飞控计算机通用性广,依据多平台实验和多架次试飞的实验流程实用性强,为无人机飞控系统开发提供了切实可行、高效可靠的途径。
关键词:飞行控制;实时系统;虚拟现实;在线调参;故障注人中图分类号:V249文献标识码:A文章编号:1002-4956(2021)03-0153-05Design and realization of hardware-in-the-loop simulationsystem for UAV flight controlLYU Yongxi,〇U Xiaobo,SHI Jingping(S h a a n x i P r o v i n c e K e y L a b o r a t o r y o f Flight Control a n d S i m u lation T e c h n o l o g y, S c h o o l o f A u t o m a t i o n,N o r t h w e s t e r n Polytechnical University, X i'a n 710072, C h i n a)Abstract: T o e n s u r e the safety o f U A V flight test a n d i m p r o v e the reliability o f U A V flight control s y s t e m design,the U A V flight control h a r d w a r e-i n-t h e-l o o p s i m u l a t i o n s y s t e m is i n d e p e n d e n t l y d e v e l o p e d.T h e flight statei n f o r m a t i o n o f U A V is g e n e r a t e d b y c o m b i n i n g the a c c u r a t e 6-D O F n o n l i n e a r m a t h e m a t i c a l m o d e l o f U A V a n dx P C real-time s y s t e m m o d u l e. A c c o r d i n g to the g r o u n d station control c o m m a n d a n d s e n s o r fault m o d e injectionc o m m a n d, the deflection o f the control surfaces u nde r different flight m o d e s a n d flight states c a n b e obtained. T h ec l o s e d-l o o p f e ed b a c k control o f the real-time s y s t e m is realized, a n d the control surfaces are d r i v e n to test ther e s p o n s e s p e e d o f the control s y s t e m. T h e s y s t e m c a n not o n l y verify the logic a n d real-time p e r f o r m a n c e o f theflight control s y s t e m,b u t also h a s the function o f onli n e t u n i n g control l a w p a r a m e t e r s w i t h the h e l p o f virtualreality t e c h n o l o g y a n d track m a p display. T h e s y s t e m h a s a h i g h d e g r e e o f m o d u l a r i z a t i o n, a n d the related h a r d w a r ea n d s o f t w a r e are w i d e l y u s e d for the U A V p l a t f o r m a n d flight control c o m p u t e r.A c c o r d i n g to the e x p e r i m e n t a lp r o c e s s o f m a n y p l a t f o r m e x p e r i m e n t s a n d flight tests, the s y s t e m is practical, efficient a n d reliable for thed e v e l o p m e n t o f U A V flight control s y s t e m.Key words: flight control; real t i m e s y s t e m; virtual reality; o n line p a r a m e t e r a d j u s t m e n t; fault injection随着信息技术的发展和社会需求的增长,无人机 目标侦查与打击[4_5]等领域。
采用xPC Target技术的半实物仿真系统的设计
采用xPC Target技术的半实物仿真系统的设计引言由于压电陶瓷执行器(Piezoelectric Actuator,PZT)具有定位精度高、带宽大、响应时间快等优点,所以被广泛地应用于如超精密加工、半导体光刻等领域的精密定位系统中。
但是随着工业化生产对产率要求的不断提高,在满足定位精度要求的同时,对定位速度提出了越来越严格的要求。
如何实现快速而精确的定位控制,如何准确评价控制算法的性能显得尤为重要。
对于PZT定位精度控制的研究主要集中于逆模型的建立,无论是基于现象的Preisach模型,还是具有明确函数表达式的Duhem模型,都可以有效补偿迟滞与蠕变效应带来影响,获得高精度的定位控制。
对于定位速度控制的研究,无论是动态性能更好的压电器件的使用,还是点到点运动控制算法的优化与应用,都取得了高速度的定位控制。
基于现有的PZT,三阶轨迹规划方法可以获得高精度、高速度的控制效果。
由于三阶轨迹规划算法离散化迭代计算的时间因子为控制系统的单位伺服周期,而以往的非实时计算平台,无法提供分辨率足够小的伺服周期,也就无法保证在算法开发验证阶段对其性能进行评价的准确性。
xPC Target采用主机与目标机结合的方式,目标机运行的实时内核可以在足够短的时间内计算控制算法的仿真模型,为三阶轨迹规划算法的实时执行及性能评价提供了有效的途径。
本文建立基于xPC Target 的PZT微动控制半实物仿真平台,对PZT的微动控制算法进行研究与验证,以获得高精度、高速度的PZT微动控制。
1 系统硬件设计PZT 微动控制半实物仿真系统硬件结构如图1 所示,整个系统硬件结构由以下几个部分组成:处于用户层的宿主机、处于中间层的xPC Target目标机和处于执行器层的PZT 驱动/控制系统。
其中,宿主机采用PC机,运行Matlab/Simulink/RTW 环境,控制算法的Simu-link模型在此环境上开发设计、编译及下载到目标机中执行;仿真过程中由目标机运行xPC Target实时内核以及控制算法,目标机采用ADV ANTECH 公司的PWS-1409TP便。
基于xPC的飞行控制系统半实物仿真设计

t e s mi h sc lsmu ain s s m a ih c n ie c e e h e — y i a i lt y t h sh g o f n e l v 1. p o e d
Ke wo ds: fihtc nr ls se ;x y r l g o to y tm PC a e ;s m ip sc lsm uai n t ̄ t e — hy ia i lto
WANG a . o g Xio d n ,DONG n. i ,YAO Xi r n a Cho g n。
( .es y X ’ n 7 0 3 , hn ; 1 C l eo E g e i , i o c n i ern nv ri , i a 1 0 8 C i a e n n t 2 T eT id Fih c d myo i F r e Jn h u1 1 0 C ia . h hr l t a e f r o c ,i z o 2 0 0, hn ) g A A
可 执行 代 码 。该 代 码 可 以 实 时 地运 行 在 无 任 何 操 作 系 统 的
半实物仿真是把数学模 型 、 实体模 型和系统 的实际 设 备联系在一起运行 , 组成仿真 系统 。实 时性是进 行半实物
仿真 的必 要 前 提 。从 系 统 的观 点 来 看 , 有 实 物 介 入 仿 真 因
基于xPC的光电平台系统半实物实时仿真
基于xPC的光电平台系统半实物实时仿真黄显林;鲍文亮;卢鸿谦;李明明【摘要】为了便捷高效地设计和调试光电平台系统的稳定、跟踪控制算法,基于Matlab的xPC Target环境设计开发了半实物实时仿真系统.阐述了系统的总体设计方案,给出了系统软、硬件实现方法.通过半实物仿真,完成了平台的模型结构参数辨识,设计并测试了比例积分控制器、校正控制器和μ综合控制器.对半实物仿真系统进行摇摆实验以评估所设计的控制系统的视轴稳定精度.实验结果显示,校正控制器因其在低频段具有更高的增益从而使系统获得了最高的稳定精度,通过实验结果可有效地选择出扰动抑制特性最优的控制器设计.%In order to design and debug the stabilizing and tracking control arithmetic of an electro-optical platform system conveniently and efficiently, a hardware-in-the-loop simulation system was designed and implemented based on Matlab xPC target environment. The overall design of the system was presented, and the implementation of software and hardware was described. Through hardware-in-the-loop simulation, the model structure and parameter of the plant were identified, furthermore, proportional integral controller, correction controller, and μ synthesis controll er were designed and tested. Vibration experiments were carried out for every control system designed to evaluate the line-of-sight stabilization accuracy. Experimental results show that the correction controller, which has the maxium gain value in the low frequency band, makes the system achieve the highest stabilization accuracy. According to experimental results, the controller which has optimal disturbance attenuation is selected.【期刊名称】《应用光学》【年(卷),期】2012(033)001【总页数】7页(P19-25)【关键词】光电平台;惯性稳定;xPC目标;半实物仿真;μ综合【作者】黄显林;鲍文亮;卢鸿谦;李明明【作者单位】哈尔滨工业大学控制理论与制导技术研究中心,哈尔滨黑龙江150001;哈尔滨工业大学控制理论与制导技术研究中心,哈尔滨黑龙江150001;哈尔滨工业大学控制理论与制导技术研究中心,哈尔滨黑龙江150001;哈尔滨工业大学控制理论与制导技术研究中心,哈尔滨黑龙江150001【正文语种】中文【中图分类】TN209;TP275引言光电稳定跟踪平台是近年来发展迅速的一种新型实时图像侦察设备,其主要功能是隔离载体的运动使平台承载的光学传感器能够获得目标或目标区域稳定清晰的图像[1-2]。
基于xPC目标的飞控系统半实物实时仿真
⑥
2 0 Si eh E gg 0 7 c.T c . nn.
基 于 x C 目标的飞控 系统半实物 实时仿真 P
王 先 泽 刘 志 勤 陈 怀 民 张 , 琳
( 西安市第 二炮兵 工程学 院 西安 7 0 2 ; , 10 5 西北工业大学无人机特种技术重点实验室 西安 7 0 6 ) , 1 0 5
MA T A L L B的可 视 化 Sm l k和 R W 工 具 箱 建 立 iui n T
仿真系统模型 , xC 目标下对板卡 的设备驱动程 在 P 序进行封装 , 并对仿真进行实时信号跟踪 和参数调
整 , 而完 成 飞控 系统半 物理 实 时仿 真 的方 法 从 。
仿真与测试人员提供仿真测试的环境¨ 。但是 , J 建 立实际系统的准确仿真模型非常困难 , 纯数字仿真
宿主机和 目标机可 以是不 同类 型的计 算机。其 中
宿 主机用 于运 行 Sm l k 而 目标 P iui , n C机 则 用于 执行 所生 成 的代码 。x C 目标 提供 了一个 高 度 简缩 型 的 P
理仿真 、 扩展性好等优点。但是 , 价格非常 昂贵 , 且 开发维护非常 困难 l 。近年来 随着计算机 软硬件 2 j 技术的迅速 发展 , 为开发廉 价、 高精度 的实 时仿真 平 台提 供 了有 利 条 件。本 文 介 绍 了 一 种 采 用
就需要对 系统进行 半物理仿 真。半物理仿 真 即是 把部分实物放到系统 中进行考察 , 使仿真条件更接 近于实际 , 在实验室 中即可对飞行控制律算法等研 究进行检验 , 更加利于对飞控系统及其仿 真算法进
行研究 , 能缩 短从 仿 真 试 验 到 实 用 环节 的 开发 周 也
8x6 Pn u 08/ et m计 算机 或 P i C兼容 机转变为一 个实
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据可通过局域网、Intemet进行连接;(2)支持任何台式Pc机、PC/104、CompactPCI、工业PC或SBC(单板机)作为实时目标系统;(3)依靠处理器的高性能水平,采样率可达到100kHz;(4)扩展了L/0驱动设备库,现已支持超过150种标准L/O板;(5)可以得到来自主机或目标机的信号,也可以动态调整参数;(6)在宿主机和目标机上都可进行交互式的数据可视化和信号跟踪;(7)使用xPcTargetEmbeddedOption能针对独立操作进行系统配置.图1XPC目标双机模式3系统的硬件连接在xPc目标的半实物仿真中,主要通过数据采集卡来实现计算机和外部设备的连接,既需要通过数据采集卡的A/D接口从外部模拟设备采集数据送到目标机,也需要通过D/A接口将目标机的计算结果送往外部模拟设备.3.1采用XPC目标提供的I/O设备xPc目标提供了支持超过150种标准工/o板的I/0驱动设备库.xPc目标所提供的D/A、A/D、DI、D0等模板,它实际上是为不同的板卡提供不同的驱动程序.在应用中,将所用到的L/o设备对应的模板拖人模型中,进行采集卡的参数设置(如通道数、电压范围、采样时间、基地址等),并在实际仿真测试系统中接入相应板卡.在编译模型文件时,其中的板卡的信息就会被编译为可执行代码,下载到目标机上后,目标就通过数据采集卡和外部设备建立了联系,构成实时仿真测试回路.在仿真过程中可以从这些板上输入输出数据,以进行半实物仿真.本文目标机安装的是研华公司(Advantech)的PCL一711B和PCL一728数据采集卡.水利水电技术第36卷2005年第1期张江滨,等∥构建基于xPC目标的实时仿真测试系统3.2采用其他I/O设备如果没有采用xPC目标提供的L/0设备,则需自己编写设备驱动程序,这时可参考xpcblocks文件夹下的各种设备驱动程序模块的源代码来编写程序,并存为filename.c,然后在MATLAB命令窗口输入命令:mex£1ename.c,MATLAB自动调用编译器生成mex动态连接库文件filename.dll,并将其设置到MATLAB的搜索路径中,最后将文件封装成一个s—function模块,进行参数设置即可.4目标启动盘的制作目标机必须通过特制的软盘启动才能调用和运行XPC目标的实时内核.在安装了xPC目标软件和网络通信硬件后,就可以设置宿主机和目标机的环境属性,进行目标启动盘的制作.本文的宿主机和目标机都安装了网卡,中问通过Hub连接.将软盘插入宿主机的软驱,在MATLAB命令行输入xpcsetup,出现xPcTar-getsetup对话框,就可以进行宿主机和目标机环境属性设置.最后单击BootDisk按钮,就可完成目标启动盘的制作.5仿真模型的构建根据实际测试要求可在Simulink环境中方便地构建模型.本文以发电机励磁测试系统为例,用Simulink提供的发电机和负荷模型代替现实中复杂的电力系统,忽略调速器,以一常数代替.在xPcTarge∥BlockLibrary的A/D库中拖动研华公司(Advantech)的PCL.711B(在目标机上已经安装了PCL一711B数据采集卡)作为励磁电压的数字输入通道,采用PcL_728作为发电机A相电压的模拟输出通道.这样通过数据采集卡就可以很方便地与实际的励磁控制器结合起来,进行控制器的闭环实时仿真测试.因为PCL-728的D/A输出范围为一5~+5V,为了使A相电压在这一范围完整地输出,可在电压测量元件输出端口加适当的比例环节.同时,如果要测量其他参数,可在发电机m—pu端口加入测量模块MeasurementDemux,可对发电机的三相电流、角速度、输出功率等参数进行观察.simulink模型如图2所示.6xPC目标应用程序的创建和下载6.1仿真参数的设置在simulink模型中,仿真和实时运行参数都可在simulationPammeters对话框中设置,主要包括S01ver、workspaceL/O、Diagnostics、Real-Timeworksh叩等471 万方数据张江滨,等∥构建基于xPc目标的实时仿真测试系统电压测量图2Simu¨nk模型负荷2l:800kwlL二]负荷11800kw400kvar个下拉菜单的参数设置.6.2创建和下载XPC目标应用程序仿真参数设置完毕后,同时通过启动盘启动目标机的实时内核,在Simulink窗口中选择T001s\Real-Timeworkshop\BuildModel命令,就可对simulink模型进行编译、链接生成可执行的目标应用程序,并将其下载到目标机.7在实时仿真测试系统中运行xPC目标应用程序7.1信号输入、输出信号的输入、输出通过采集卡的L/0通道实现.在PcL_711B数据采集卡的A/D通道接人励磁电压作为输入信号,PCL.728的D/A通道输出发电机A相电压.数据采集卡的D/I、D/O可为数字量提供输入输出,然后运行xPC目标应用程序.7.2信号跟踪(1)使用xpcscope进行信号跟踪.当xPC目标应用程序下载到目标机后,在Matlab命令行输入xpc-scope,在宿主机上出现管理器窗口(Manager),根据需要可决定示波器的个数和选择要跟踪的信号,这样就可进行多示波器窗口和多信号的跟踪显示.如图3所示为某一仿真时间段信号跟踪波形,图3中水平线为PCL.71lB数据采集卡励磁电压输入信号,曲线为PcL.728数据采集卡输出发电机A相电压信号.图中横坐标为仿真时间£,纵坐标为电压u.(a)励磁电压力O5V时(b)励磁电压为1V时图3不同励磁电压下发电机A相电压跟踪波形(2)使用xpctgscope进行信号跟踪.在MAT·LAB命令行输入xpctgscope,在目标机的监视器上出现示波器窗口同样可进行多示波器窗口和多信号的跟踪.(3)使用MATLAB命令进行信号跟踪.使用xPc目标提供的函数生成目标sc叩e对象,对信号进行选择和观察.7.3XPC目标应用程序的参数调整(1)使用MATLAB命令进行参数调节.可使用MATLAB函数来改变模块的参数,不需重新创建模型的目标应用程序,就可改变程序的参数.(2)使用Simulink外部模式在线调节参数.使用Simulink外部模式下,在simulink外部模块图的任何位置改变参数,simulink都将改变后的参数自动下载到正在运行的目标应用程序中.根据信号跟踪波形可随意改变模型参数检验励磁控制器的调节效果,也可实时地测试控制器的控制算法,参数设计,直至得到满意效果.如图3为不同励磁电压的信号跟踪波形图.7.4数据存储在环境下,进行信号跟踪的同时也可对所跟踪信号实现数据存储,供以后分析处理.在xpcscope中选择要跟踪的信号,然后单击Export选项,这时在MATLAB的WORKSPACE中就会自动生成MAT文件.这里可记录任意时间段的任意个(如500)信号数据,这样就可很方便地对测试结果进行分析、处理.7.5数据分析在测试中所采集的实时数据是分析的依据,利用MATLAB提供的图形编辑模块GuI,按照测试要求很容易编写友好的用户界面,并根据MAT数据文件绘制试验曲线、打印报表等,进行数据分析.试验测得的数据可以通过各个试验模块进行分析处理.8结语本文详细介绍了基于xPC目标构建实时仿真测试系统的方法.利用xPC目标提供的L/0驱动设备库,很容易与硬件结合起来,使用标准的PC硬件和现成的L/O接口板,xPc目标提供了一个构建理想的低价高效的半实物仿真测试系统的途径.这种设计方法使得系统设计者充分利用了Simulink提供的工具箱和函数库,进行数学建模,然后通过RTw将Simulink模块图自动转换为对应的c代码,并下载到目标机.这样,用户在设计阶段可以在硬件布置、编写产品控制软(下转第76页)水利水电技术第36卷2005年第1期 万方数据 万方数据构建基于XPC目标的实时仿真测试系统作者:张江滨, 姚辉, 杨晓萍, ZHANG Jiang-bin, YAO Hui, YANG Xiao-ping作者单位:西安理工大学,水利水电学院,陕西,西安,710048刊名:水利水电技术英文刊名:WATER RESOURCES AND HYDROPOWER ENGINEERING年,卷(期):2005,36(1)被引用次数:7次1.杨涤;杨旭;李立涛系统实时仿真开发环境与应用 20022.李兴玮;叶磊基于MATLAB/XPC Target构建实时仿真系统[期刊论文]-计算机仿真 2003(08)3.樊晓丹;孙应飞;李衍达一种基于RTW的实时控制系统快速开发方法[期刊论文]-清华大学学报(自然科学版)2003(07)4.吴天明;谢小竹;彭彬Matlab电力系统设计与分析 20045.吴剑;孙秀霞采用MATLAB中的XPC Target对硬件进行操作[期刊论文]-现代电子技术 2002(04)6.杨冠城电力系统自动装置原理 19951.王爽心.王玎婷.杨辉.刘国栋.Wang Shuangxin.Wang Dingting.Yang Hui.Liu Guodong基于xPC目标的液压疲劳控制系统半实物实时仿真[期刊论文]-仪器仪表学报2006,27(z1)2.谢晗.吴光强.邱绪云.XIE HAN.WU GUANGQIANG.QIU XUYUN基于xPC目标的实时仿真技术及实现[期刊论文]-微计算机信息2006,22(34)3.吴剑.孙秀霞采用MATLAB中的xPC Target对硬件进行操作[期刊论文]-现代电子技术2002(4)4.刘欢.张毅.LIU Huan.ZHANG Yi基于xPC Target的机械臂控制系统开发[期刊论文]-自动化与仪表2008,23(5)5.江绍明.毕效辉.JIANG Shao-ming.BI Xiao-hui采用U盘制作xPC目标启动盘[期刊论文]-自动化与仪表2008,23(6)6.宋天佳.陈劭.苗立东.孙逊.SONG Tian-jia.CHEN Shao.MIAO Li-dong.SUN Xun xPC目标在EPS试验台电机控制中的应用[期刊论文]-工程设计学报2009,16(6)7.翟坤.杨涤.刘振刚.曲溪.Zhai Kun.YANG Di.LIU Zhen-gang.QU Xi采用xPC实现转台的位置伺服系统[期刊论文]-系统工程与电子技术2005,27(4)8.赵斌.周军.卢晓东.Zhao Bin.Zhou Jun.Lu Xiaodong基于xPC Target的飞行器半实物仿真系统研究[期刊论文]-计算机测量与控制2011,19(3)9.苗立东.Miao Lidong xPC目标机的启动方法研究[期刊论文]-计算机应用与软件2009,26(6)10.李中健.杜娟.Li Zhongjian.Du Juan xPC驱动程序开发及在无人机仿真中的应用[期刊论文]-计算机测量与控制2009,17(3)1.韩加蓬.刘小莉基于xPC的TPMS数据采集系统的设计[期刊论文]-微计算机信息 2007(23)2.王爽心.王玎婷.杨辉.刘国栋基于xPC目标的液压疲劳控制系统半实物实时仿真[期刊论文]-仪器仪表学报2006(z1)3.刘小莉.韩加蓬MATLAB/xPC环境下数据采集系统的设计[期刊论文]-山东理工大学学报(自然科学版) 2007(4)4.时亚忠.王旭永.张红伟采用C MEX S函数编写xPC环境下设备驱动模块的研究[期刊论文]-测控技术 2006(7)5.丁荣军快速控制原型技术的发展现状[期刊论文]-机车电传动 2009(4)6.左鹏峰基于MATLAB环境的末制导炮弹制导系统半实物仿真[学位论文]硕士 20067.姜春宇中压共轨柴油机气门正时电控系统的设计[学位论文]硕士 2006本文链接:/Periodical_slsdjs200501020.aspx。