船舶操纵课件--第2章操纵手段的作用及其运用教学案例
第二章 船舶操纵基本知识
第二章船舶操作基本知识船舶操纵是指船舶驾驶人员根据船舶操纵性能和客观环境因素,正确地控制船舶以保持或改变船舶的运动状态,以达到船舶运行安全的目的。
船舶操纵是通过车、舵并借助锚、缆和拖船来实现的。
要完成操纵任务,除保证所有操纵设备处于正常良好的技术状态外,操纵人员必须掌握船舶操纵性能(惯性和旋回性等)及对客观环境(风、流、水域的范围等)的正确估计。
第一节车的作用推动船舶向前运动的工具叫船舶推进器,推进器的种类很多,目前常见的有明轮、喷水器推进器螺旋桨、平旋推进器、侧推器等。
因为螺旋桨结构简单、性能可靠且推进效率高,所以被广泛应用于海上运输船舶。
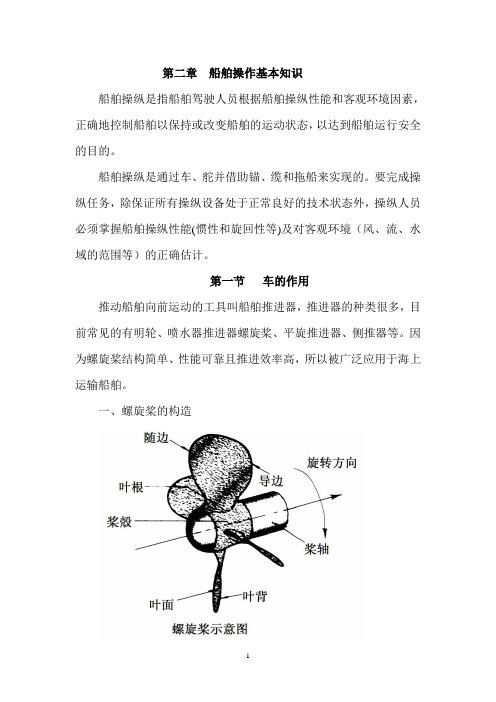
一、螺旋桨的构造1、螺旋桨的材料和组成螺旋桨常用铸锰黄铜、青铜和不锈钢制作。
现在也有采用玻璃制作的。
螺旋桨有桨叶和浆毂两部分组成,连接尾轴上。
(1)桨叶,一般为三片和四片,个别也有五片甚至六片的,低速船采用宽叶,高速船采用窄叶。
(2)桨毂,多数浆毂与桨叶铸成一体。
浆毂中心又圆锥形空,用以套在尾轴后部。
(3)整流帽(4)尾轴2、螺旋桨的配置一般海船都采用单螺旋桨,叫单车船。
也有部分船舶(客船和军舰)采用双螺旋桨,叫双车船。
单桨船的螺旋桨通常是右旋转式的。
右旋是指船舶在前进时,从船尾向船首看,螺旋桨在顺车时沿顺时针方向转动的称为右旋,沿逆时针方向转动的称为左旋。
目前,大多数商船均采用右旋式。
双桨船的螺旋桨按其旋转方向可分为外旋式和内旋式两,对于双桨船,往舷外方向转动的称为外旋,反之称内旋。
通常采用外旋,以防止水上浮物卷入而卡住桨叶。
进车时,左舷螺旋桨左转,右舷螺旋桨右转,则称为外旋式;反之,称为内旋式。
二、推力、阻力和功率1、船舶推力在主机驱动下,螺旋桨正车旋转时推水向后运动,水对螺旋桨的反作用力在船首方向的分量就是推船前进的推力,倒车时则产生指向船尾的拉力。
流向螺旋桨盘面的水流称为吸入流(suction current);离开螺旋桨盘面的水流称为排出流(discharge current)。
船舶操纵
2.2 操纵运动方程的线性化
水动力学数学模型
船舶静水中运动时的受力,采用三阶泰勒展开 水动力导数超过50个,可以参见 Fossen T. I. Guidance and Control of Ocean Vehicles, John Wiley & Sons, New York, USA, 1994
阿勃柯维奇
野本兼作(1957)
1.1 船舶操纵性总论
船舶操纵性研究的发展过程
迪德
提出了用于评价航向稳定性的螺旋试验方法 6自由度运动方程,及泰勒基数展开,为非线性研究 提供了数学工具 整个系统看作一个动态系统,研究了船舶对操舵的 频域响应(舵做输入,船运动作输出)
阿勃柯维奇
野本兼作(1957)
1.1 船舶操纵性总论
船舶操纵性研究的发展过程
独木舟时期:刳木为舟,剡木为楫,具有推进 和操纵功能; 随船舶容积的增加:一排长桨---〉短而宽的船 尾桨; 摇橹和舵是中国在操船技术上的重大发明,具 有重要意义; 19世纪后,风帆被蒸汽机和柴油机动力所代替, 但是舵却一直沿用至今。 经历了从简单到复杂,试验到理论的过程
水动力导数的物理意义
水动力和力矩的角加速度导数
正的回转角加速度在船首产横负的 在船尾产生正的 和负的 因此, 较小,取决于船型; 是一个很大的负值
和
和负的;
相当于船舶的附加惯性力 矩系数。
2.2 船舶操纵运动方程
水动力导数的物理意义
舵导数(控制导数)
右舵角为正,正的舵角产生负的舵力, 舵力矩使船向右转,是正的,故
2.2 操纵运动方程的线性化
92船舶操纵PPT课件
横距是指从操舵开始到船舶的航向转过任一 角度时船舶重心所移动的横向距离。通常, 旋回资料中所说的横距,特指当航向转过 900时的横距,并以Tr表示之,它大约为旋 回初径的一半。
10
(3)旋回初径(tactical diameter)
旋回初径是指从操舵开始到船舶的航向转过 1800时重心所移动的横向距离,并以DT表示 之。它大约为3~6倍的船长。
14
上述六个尺度,各从不同的角度在实际上规定着 旋回圈的形状及大小。在航海实践中,旋回圈的 大小常常用其旋回初径DT表示。有的也采用其旋 回初径与其船长L(一般为两柱间长)的比值DT /L来表示,称为相对旋回初径。
15
2.描述船舶旋回运动状态的运动要素
表征船舶旋回运动状态的运动要素主要有漂角、转 心及其位置、旋回中的降速和旋回中的横倾等,它 们与船舶的旋回性能有着密切的关系。增大。
16
(1)漂角(drift angle)
船舶首尾线上某一点的线速度与 船舶首尾面的交角叫做漂角,如 图1-3所示。用β表示之。一般船 舶的漂角大约在30~150之间。
漂角越大的船舶,其旋回性越好, 旋回直径也越小。超大型船舶较
一般货船的方形系数值较高,长
宽比较低,有着较好的旋回性,
它在定常旋回中的漂角也较大, 最大可达到200左右。
5
2.第二阶段
操舵后,随着船舶横移速度与漂角的增大,船舶 的运动速度矢量将逐渐偏离首尾面而向外转动, 越来越明显的斜航运动将使船舶的旋回运动进入 加速旋回阶段
运动特点 : 船舶的横移速度和漂角逐渐增大,开始阶段船
舶旋回的角加速度较大,随着船舶角速度的不断 提高,角加速度渐次降低,并逐渐向定常旋回阶 段过渡;斜航中船舶降速也因漂角的增大而加剧; 伴随内倾的消失,船舶将出现外倾角并渐次增大。
《船舶操纵》课件

2.船舶推力
船舶推力是指转动的螺旋桨 推水向后,水对螺旋桨的反作 用力在船首方向的分量。倒车 时,则产生指向船尾的拉力。 流向螺旋桨盘面的流称为吸入 流,离开螺旋桨盘面的流称为排出流。吸入流的特点 是流速较慢、范围较大,流线几乎相互平行;排出流 的特点是流速较快,范围较小。水流旋转激烈。 对于给定的螺旋桨,它所产生推力T和转矩M Q 的大 小与其转速n、船速Vs,以及螺旋桨轴在水下的沉深 有关。船速Vs一定时,推力T与转速n2成正比,转矩MQ 也与n 2 成正比;当转速n一定时,则相应方向的船速 Vs越低,螺旋桨推力T越大,转矩MQ也越大。
2.功率种类和效率
1)功率种类
(1)指示功率(IHP) 指示功率是指在主机的气缸内产生的功率,主要用于 蒸汽机。 (2)制动功率(BHP) 制动功率是指输出于主机之外可实际加以利用的功率, 主要用于柴油机。 (3)轴功率(SHP) 轴功率是指传递到与螺旋桨尾轴相接的中间轴上的功 率,主要用于汽轮机。 (4)收到功率(DHP) 收到功率是指通过船尾轴管后向螺旋桨提供的功率。
上述输出功率的相互比例,将因主机的种类和 新旧程度不同而不同,一般情况下如下表所示。
种 类 最大持续输出功率 常用(海上)输出功率 过载(应急)输出功率 输出功率比 100% 80%~90% 105%~110%
倒车输出功率 40%~60% 进港航行或雾航时往往需要备车,此时的 输出功率也称备车输出功率,通常约为最大持 续输出功率的50%~60%。
据统计,船速Vs和船舶长度均较接近的船舶,其航 向稳定性指数T与该船的方形系数Cb和长宽比有密切 关系。方形系数Cb较低、长宽比较高的船,一般说来, 具有较高的航向稳定性
4.舵效
1)舵效的含义 舵效是指运动中的船舶,操一定舵角后,使船在 较短时间内,较小的水域上得到的转头角,即改向 角的大小。 若转头角大,则认为舵效好,否则,舵效就差。 2)影响舵效的主要因素以及提高舵效的措施 (1)舵角: 因为舵角的大小直接影响转船力矩和转头角的大 小,所以加大舵角是提高舵效的有效措施。 (2)舵速: 舵速是由船速、伴流和螺旋桨排出流流速三部分 组成。船舶在低速航行中,当需要大角度转向时, 则可加大螺旋桨转速,提高滑失比,增大排出流流 速以提高舵效。
《船舶操纵》课件

4) 旋回直径(final diameter)
旋回直径是指船舶作定常旋回时重心轨迹圆的直径, 亦称旋回终径,并以D表示之,它大约为旋回初径的 0.9~ 1.2倍。 5) 滞距(reach)
亦称心距。正常旋回时,船舶旋回直径的中心 O 总较操 舵时船舶重心位置更偏于前方。滞距是该中心 O 的纵距,并 以Re代表之,大约为1~2倍船长,它表示操舵后到船舶进入 旋回的“滞后距离”,也是衡量船舶舵效的标准之一。
二节 船舶操纵方程及船舶操纵性指数
一、船舶操纵运动方程
Tŕ+r=Kδ
式中:K —— 旋回性指数(s-1); T —— 追随性指数(s); r —— 旋回角速度(1/s); ŕ —— 旋回角加速度(1/s2);
δ —— 舵角(°)。
该方程最早是由日本学者野本谦作提出的,因此也称为 野本方程。该式中,T称之为船舶的追随性指数(turning lag index), 单 位 为 s;K 称 之 为 船 舶 的 旋 回 性 指 数 ( turning ability index)。
11.螺旋桨的转动方向
由于受螺旋桨横向力的影响,船舶向左或向右旋回时的旋回 圈的大小将有所不同。对于右旋固定螺距螺旋桨单车船而言,
在其他条件相同的情况下,向左旋回时的旋回初径要比向右 旋回时的旋回初径要小一些。但对于超大型船舶而言,这一 差别很小。 另外,船体的污底、风、流的作用都将对船舶旋回圈 的大小产生影响。例如顶风、顶流使旋回圈进距减小,顺风、 顺流使旋回圈进距增大等等。
四、旋回圈要素在实际操船中的应用
由旋回试验测定的旋回圈资料是船舶操纵性能的重要 内容之一,它不仅用来评价船舶的旋回性能,同时还可以 直接用于实际操船。
1.旋回初径、进距、横距、滞距和在实际操船 中的应用
《船舶操纵》课件(精选)97页PPT
16、业余生活要有意义,不要越轨。——华盛顿 17、一个人即使已登上顶峰,也仍要自强不息。——罗素·贝克 18、最大的挑战和突破在于用人,而用人最大的突破在于信任人。——马云 19、自己活着,就是为了使别人过得更美好。——雷锋 20、要掌握书,莫被书掌握;要为生而读,莫为读而生。——布尔沃
《船舶操纵》课件(精选)
26、机遇对于有准备的头脑有特别的 亲和力 。 27、自信是人格的核心。
28、目标的坚定是性格中最必要的力 量泉源 之一, 也是成 功的利 器之一 。没有 它,天 才也会 在矛盾 无定的 迷径中 ,徒劳 无功。- -查士 德斐尔 爵士。 29、困难就是机遇。--温斯顿.丘吉 尔。 30、我奋斗,所以我快乐。--格林斯 潘。
船舶操纵的基本原理(共10张PPT)

12、0)影对响右旋旋回单圈桨大船小,的慢因速素航行时,由SWT的作用,向左回转的旋回圈在直径较小,但对V型船尾高速航行掉头时,由于伴流效应横向力
航海吃水和以最大营运船速航行时,将舵从一舷的350转至另一 、船尾体流 横螺倾旋时性,效由应于横左向右力浸均水使体船积首不右等偏,,低且速大时多,能受克阻服力水推面力效转应船横力向矩力作的用作,用操,舵因向此低向舷右侧回转时的, 旋其回旋圈回直圈径直较径小小;于向左回旋的旋回圈 舷的350,或且从任何一舷的350转至另一舷的300的时间应不 直舵径面。 积系数μ越大,旋回圈直径就越小。 及3通量)对常θ≈反应 所9移0的说0量~超时的(1间横2偏过0极距0距为是之)2重指后L要当,8K ,航进s驾向入;驶转员过一应90熟°般时练的掌情横握距况,。以下便准,确操由纵船正舶。舵至一舷350为止的时间约15s左 右。内河船舶装备机动舵机,当L﹥30m时其主操舵装 (反3移)量逆是风指回转转舵时后的,旋船回舶圈重直心径从小原于航顺向风向回操转舵时相的反旋一回侧圈横直移径的;距离。
船舶制动能力是指船舶在某一船速下,主机停车或倒车以后, 船舶对主机工况的反应能力。它可用主机停车或倒车后船舶 对岸相对静止所需的时间和船舶滑行距离的长短来衡量。
第二节 旋回圈要素与船舶操纵性的关系
船舶在定速直航状态下,操某一舵角(一般为满舵),船舶 将作纵向和横向相结合的复合运动,称为旋回运动。船舶 作旋回运动时重心运动的轨迹,称为旋回圈。旋回圈几何 特征是:
船舶操纵的基本原理
船舶改变航行方向的快慢能力。或者船舶受外力作用偏离 了原航向,用舵操纵船舶使它恢复原航向航行的快、慢能 力(或船舶追随航向或舵角的快、慢能力)。追随性的优劣 可用追随性指数T值来衡量。T值越小,操舵时船舶对舵 角响应所需的时间越少,追随性能越好;T值越大,操舵 时船舶对舵角响应所需的时间越多,追随性能越差。
船舶操纵-PPT课件

2.2 船舶操纵运动方程
野本方程
操舵速度有限,船舶的惯性很大,船舶对舵的 响应也是一种非常缓慢的运动,因此有
建立了有效的数学研究方法,借鉴飞艇操纵理论
1939,巴辛
利用里亚谱诺夫运动稳定理论研究船舶的运动稳定 性
1.1 船舶操纵性总论
船舶操纵性研究的发展过程
1944,肯夫(kemf)
提出了用Z形操舵试验来评价船舶的操纵性,开创了 船舶对操舵的动态响应研究
1946,戴维逊(K. S. Davidson)和许夫(L. I. Schiff)
1.1 操纵性总论
操纵性的重要意义(经济性要求)
在海上的直航运动,
航向稳定性好 不用经常地去操舵,航迹接近直线
不好的船 频繁操舵纠正航向,经历曲折的航线,增加了实际 的航行距离,同时增加了操纵装置和推进装置的功 率消耗 由于操舵增加的功率消耗占主机功率的2%-3%,航 向稳定性不好的船,可以高达20%。
船舶有横漂速度 时横向力的导数。该力很大, 方向与 相反;
船舶有横漂速度 时横向力对重心力矩的导数。 该力矩不太大,为负值,方向有使漂角增大的趋势;
船舶有前进速度 时纵向力的导数。该力较小, 方向与 相反。
2.2 船舶操纵运动方程
水动力导数的物理意义
水动力和力矩的旋转导数 和
船首具有右舷攻角,产生负的水动力和负的水动力 矩
– 该时刻船舶运动状态决定的水动力 – 该时刻以前的运动历史决定的水动力
其他原因引起的外力,如托缆力和风压力等;
2.2 操纵运动方程的线性化
水动力学数学模型
船舶静水中运动时的受力,采用一阶泰勒展开
2.2 操纵运动方程的线性化
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
低速时,伴流逐渐减小,则伴流横向力可忽略;沉深横向力和排出流 横向力使首右偏。则,综合作用是沉深横向力和排出流横向力使船首右偏。
2020/10/12
课件
32
2020/10/12
课件
24
三、螺旋桨的致偏效应及其运用
(3)伴流横向力的产生条件 由上述分析可见,如果伴流为0,则,螺旋桨上下叶的攻角相同,则,
不产生横向力,则,伴流横向力的产生条件为有伴流存在。 (4)伴流横向力的方向 对于右旋螺旋桨,进车时,首向右;倒车时,首向左。 对于左旋螺旋桨,进车时,首向左;倒车时,首向右。
其中Vp=Vs-ωp
2020/10/12
课件
10
二、滑失和船速
(2)滑失比 定义:螺旋桨的滑失S与理论进速nP之比称为滑失比Sr,既:
Sr=nPnPVp
滑失与滑失比中的螺旋桨进速Vp若用船速Vs代替,得出的结果分别称 为虚滑失或虚滑失比。
2020/10/12
课件
11
二、滑失和船速
(3)滑失在操纵中的应用 由此可见,滑失是衡量螺旋桨推进效率的重要指标。滑失越大,螺旋
2020/10/12
课件
25
三、螺旋桨的致偏效应及其运用
3、排出流横向力 螺旋桨进车时,排出流作用在舵上; 螺旋桨倒车时,排出流作用在船体上;
(1)排出流横向力的产生机理 进车时 舵的X方向进速为
V R= XV S-R V RX
ΔVRX—在舵叶处由于螺旋桨旋转引起的轴向增速。 倒车时 倒车时,旋转的排出流打在船体尾部。由于船尾形状上大下小,致使
QXpp121214Dt3pp41D2pwp12uw2p20u.27nD0p.72nDCpQ2C T
=tan101.7nwDppu
2020/10/12
课件
7
一、船舶阻力பைடு நூலகம்推力
其中: tp为推力减额系数,wp 为桨处伴流系数,Dp为螺旋桨的直径,n为主机
转速,β为桨的进程角,CT 、CQ为试验系数,以下式给出:
2020/10/12
课件
27
三、螺旋桨的致偏效应及其运用
螺旋桨产生的船舶偏转总结
沉深横向力 伴流横向力 排出流横向力
右旋式
进车
倒车
首向左
首向右
首向右
首向左
首向右
首向右
左旋式
进车
倒车
首向右
首向左
首向左
首向右
首向左
首向左
2020/10/12
课件
28
三、螺旋桨的致偏效应及其运用
4、船舶不同运动状态下螺旋桨致偏作用的综合分析 以下讨论仅限于右旋单车船 (1)静止中进车
二、滑失和船速
2020/10/12
课件
18
三、螺旋桨的致偏效应及其运用
1、沉深横向力 2、伴流横向力 3、排出流横向力 4、船舶不同运动状态下螺旋桨致偏作用的综合分析
2020/10/12
课件
19
三、螺旋桨的致偏效应及其运用
1、沉深横向力 (1)沉深的概念
h-为沉深 h/D-为沉深比
2020/10/12
桨的推进效率越低。它在船舶操纵中有着重要意义: 由滑失的定义可见,对于给定的螺旋桨,滑失与船速有关,而船速与
船舶的阻力有关,阻力越大,船速越低,滑失越大。因此船舶污底越严重、 遭受的风浪越大,滑失也越大。
反之,可利用螺旋桨的滑失提高船舶的舵效(在较小的距离内转过较 大的角度)。
2020/10/12
课件
2、伴流横向力 (1)伴流的概念
定义:运动中的船体附近的水受到船体运动的影响产生一种追随运动的 水流称为伴流。
伴流的分类 摩擦伴流:由于水和船体之间的摩擦而产生的伴流; 势伴流:由于船体运动,船体周围压力场的变化产生的伴流;
伴流的分布特点 沿X轴方向:船首小,船尾大。即螺旋桨附近伴流大; 沿Y轴方向:左右对称,离船越远越小; 沿Z轴方向:上大下小。
一般港内的最高主机转速约为海上常用转速的70~80%左右。 港内船速与海上船速一样,常按主机输出功率的比例不同而划分 为“前进三”、“前进二”、“前进一”之外,尚有“微速前进”一档; 微进时的主机输出功率和转速,是主机可以输出的最低功率和最低转速。
2020/10/12
课件
16
二、滑失和船速
(3)港内船速(Harbour Speed) 如同前进时港内船速分级一样,在倒车档次中也分为“后退三”、
由于是进车,舵效较好,则,无论怎样偏转,都可用舵克服。
2020/10/12
课件
30
三、螺旋桨的致偏效应及其运用
(2)静止中倒车 • 空载
由于h/D较小,沉深横向力使首右偏;开始是静止,伴流不存在或较 小,则伴流横向力可忽略;排出流横向力使船首右偏。则,综合作用是沉 深横向力和排出流横向力使船首右偏。 • 满载
上部的攻角大于下部的攻角,则产生横向力。
2020/10/12
课件
26
三、螺旋桨的致偏效应及其运用
3、排出流横向力 (2)排出流横向力的产生条件 进车时,有伴流存在,就要进车排出流横向力; 倒车时,只要螺旋桨转动就存在倒车排出流横向力。 (3)排出流横向力的方向 对于右旋螺旋桨,进车时,首向右;倒车时,首向右。 对于左旋螺旋桨,进车时,首向左;倒车时,首向左。
根据运动方程,其作用于X轴方向的力为:
X = m (u v)r
其中X=(T-R),T为推力,R为阻力。 船舶作直航运动时,vr=0,则:
T R = m u
船舶作直航运动时,加速度=0,则:
T=R
2020/10/12
课件
3
一、船舶阻力与推力
基本阻力与船速之间的关系 对于给定的船型,基本阻力的大小与吃水、船速有关,即:R=ƒ(d,v)
由图可见: 当d一定时,船速V增加,R0也增大; 当V一定时,吃水d增加,R0也增大; 由图还可以看出:低速时,R0随船速V呈线性变化;高速时,R0随船速
V呈非线性变化,且需要的推力越大。
2020/10/12
课件
5
一、船舶阻力与推力
(2)附加阻力 △R=R1+R2+R3+R4
其中: R1为污底阻力:由船体湿水部分上的海生物引起的阻力。 R2为附体阻力:由螺旋桨、舵等船体上的附体引起的阻力。 R3为空气阻力:船体水上部分受到的空气作用引起的阻力。 R4为波浪阻力:船体水下部分受到波浪作用引起的阻力。
12
二、滑失和船速
3、船速的分类 在一定范围内,螺旋桨转速n越高,船速V越大。但是,对于给定的船
舶主机,其转数的提高不是无限的一旦超出这个范围,主机将超负荷运转, 最终可能损坏主机,因此不得不对船速作出一定的限制。 (1)额定船速 (2)海上船速(Sea Speed) (3)港内船速(Harbour Speed)
29
三、螺旋桨的致偏效应及其运用
4、船舶不同运动状态下螺旋桨致偏作用的综合分析 以下讨论仅限于右旋单车船 (1)静止中进车
满载 低速时,由于h/D较大,沉深横向力较小;开始是静止,伴流不存在
或较小,则伴流横向力和排出流横向力可忽略。则,综合作用是船舶几乎 不偏转。
高速时,随着伴流的增大,伴流横向力和排出流横向力逐渐加大,则, 综合作用是伴流横向力和排出流横向力使船首右偏。
X u S u L A C f d C r C X u 1 2 uS A U 2 C f C r C
2020/10/12
课件
6
一、船舶阻力与推力
2、船舶推力 船舶推力是指螺旋桨通过主机驱动,推水向后,水对螺旋桨的反作用
力在船舶首尾方向的分量。倒车时,船舶首尾方向的分量称为拉力。 (1)推力的大小 对于给定的螺旋桨,其推力的大小为: T=ƒ(n,v)
空载 低速时,由于h/D较小,沉深横向力使首左偏;开始是静止,伴流不
存在或较小,则伴流横向力和排出流横向力可忽略。则,综合作用是沉深 横向力使船首左偏。
高速时,随着伴流的增大,伴流横向力和排出流横向力逐渐加大,则, 综合作用是伴流横向力和排出流横向力克服沉深横向力使船首右偏。
2020/10/12
课件
第二章 操纵设备的作用及其运用
操纵设备包括车、舵、锚、缆、拖轮等。 熟悉车、舵、锚、缆、拖船的作用及其运用的知识。
2020/10/12
课件
1
第一节 螺旋桨的作用
一、船舶阻力与推力 二、滑失和船速 三、螺旋桨的致偏效应及其运用 四、双车船的螺旋桨横向力 五、侧推器的使用
2020/10/12
课件
2
一、船舶阻力与推力
定义:在深水中,主机在海上转数下船舶所能达到的静水船速称为海 上船速。
2020/10/12
课件
15
二、滑失和船速
(3)港内船速(Harbour Speed) 近岸航行,尤其是近港航行,常需备车;港内船舶密集,水深较
浅,弯道较多,用舵频繁。为便于操纵与避让和不使主机超负荷,港内航 行最高船速也应较海上船速为低,该船速通常由船长和轮机长商定并共同 遵守执行。
2020/10/12
课件
13
二、滑失和船速
(1)额定船速 新船验收后的主机,可供海上长期使用的最大功率称为额定功率NH,
与其相对应的转数称为额定转数nH,该条件下主机发出的转矩称为额定转 矩QH,相应的船速称为额定船速VMAX。
定义:在深水中,在额定转速下船舶所能达到的最大静水船速称为额 定船速VMAX
课件
21
三、螺旋桨的致偏效应及其运用
1、沉深横向力 (3)沉深横向力的产生条件 当h/D<0.65时,螺旋桨沉深横向力明显增大。 (4)沉深横向力的方向 对于右旋螺旋桨,进车时,首向左;倒车时,首向右。 对于左旋螺旋桨,进车时,首向右;倒车时,首向左。