机电一体化设备的组装与调试模拟竞赛试题六Word版
机电一体化设备组装与调试试题及评分标准
机电一体化技能展示
任
务
书
一、设备组成及工作情况描述
1.工作情况描述:
XX生产线用于往返运料装运工作,要求来料(用金属件表示来料)第一次到达第一个传感器时,传送带立即停止运行,2S后,继续运行,到达第二个传感器后,传送带立即停止,2S后反向运行,至第二次到达第一个传感器后,传送带立即停止,2S后反向运行,如此反复。
初始状态:来料位于进料口,传送带通电即运行。
2.设备组成:
生产设备终端设备的组成示意图如图1-1所示。
该设备使用的控制元件及功能,指示元件及其功能如表1-1所示。
图1-1生产终端设备组成示意图
表1-1控制元件及功能,指示元件及其功能
按图1-2所示的要求,将传送带输送机、光电传感器、连接开关、汽缸和出料斜槽等组装在台面上。
生产线终端设备的批示灯部件,根据台面情况,自己确定安装位置。
图1-2生产设备位置装配图
3.画出电气原理图,并根据电气原理图连接电路。
4.编写控制生产线终端设备动作的PLC程序(梯形图),并调试运行通过。
机电一体化设备组装与调试技能展示评分表
工位号号
展示现场记录。
某市机电一体化设备组装与调试比赛试题
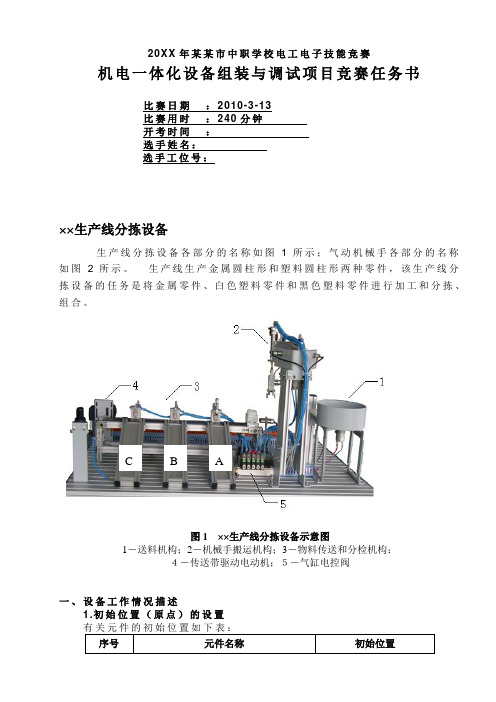
20XX 年某某市中职学校电工电子技能竞赛机电一体化设备组装与调试项目竞赛任务书比赛日期 :2010-3-13比赛用时 :240分钟 开考时间 : 选手姓名: 选手工位号:××生产线分拣设备××生产线分拣设备各部分的名称如图1所示;气动机械手各部分的名称如图2所示。
××生产线生产金属圆柱形和塑料圆柱形两种零件,该生产线分拣设备的任务是将金属零件、白色塑料零件和黑色塑料零件进行加工和分拣、组合。
图1 ××生产线分拣设备示意图1-送料机构;2-机械手搬运机构;3-物料传送和分检机构;4-传送带驱动电动机;5-气缸电控阀一、设备工作情况描述1.初始位置(原点)的设置AB C图2 悬臂 手臂手指 气动马达立柱 右限止位置左限止位置设备工作前,必须确保各有关元件在初始位置。
若其中有某元件不在初始位置,则系统不能起动。
2.设备初始运行和送料在各有关元件初始位置正确的情况下,要求PLC 转入运行后,工作台上的红色指示灯闪亮,当按下启动按钮SB5,工作台上的绿色指示灯闪亮,红色指示灯熄灭。
当物料平台的光电开关检测到有零件到达时,转盘停止,等待机械手将零件搬运到皮带输送机落料口。
一旦物料被取走后,转盘启动送料。
3.机械手搬运过程物料平台零件被检测到时,机械手悬臂伸出→气爪下降到零件位置→气爪夹紧零件到位后延时1秒→机械手升降气缸上升到位→机械手悬臂缩回到位→机械手悬臂向右旋转到位→机械手悬臂伸出到位→机械手升降气缸下降到位→气爪松开零件并延时1秒,将零件从落料口放在皮带输送机上→气爪升上升到位→机械手悬臂缩回到位→机械手悬臂向左旋转到位,回到原位待命。
4.物料传送与分拣 (1)、工作方式一设定金属零件和白色塑料零件为待加工的正品毛坯,加工过程用延时来模拟,而黑色塑料零件为次品毛坯,不必再次加工。
当皮带输送机零件进口位置的光电传感器识别到有零件后,驱动传送带的三相交流异步电动机以26Hz 的频率启动,将零件向前输送。
机电一体化设备组装与调试 理论试题
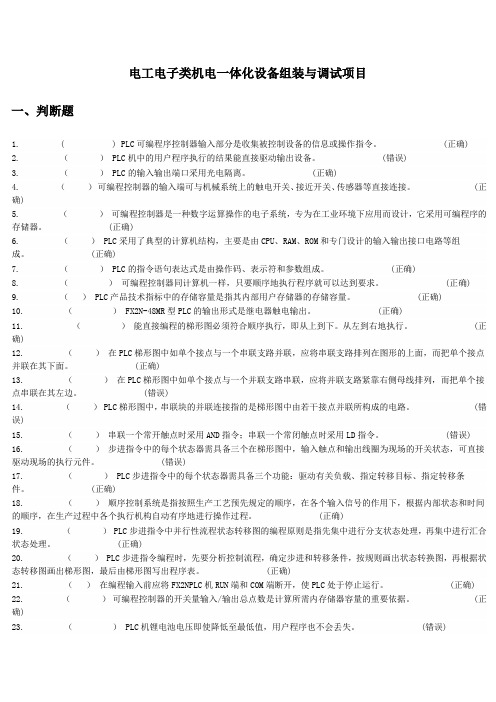
电工电子类机电一体化设备组装与调试项目一、判断题1. ( ) PLC可编程序控制器输入部分是收集被控制设备的信息或操作指令。
(正确)2. () PLC机中的用户程序执行的结果能直接驱动输出设备。
(错误)3. () PLC的输入输出端口采用光电隔离。
(正确)4. ()可编程控制器的输入端可与机械系统上的触电开关、接近开关、传感器等直接连接。
(正确)5. ()可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计,它采用可编程序的存储器。
(正确)6. () PLC采用了典型的计算机结构,主要是由CPU、RAM、ROM和专门设计的输入输出接口电路等组成。
(正确)7. () PLC的指令语句表达式是由操作码、表示符和参数组成。
(正确)8. ()可编程控制器同计算机一样,只要顺序地执行程序就可以达到要求。
(正确)9. () PLC产品技术指标中的存储容量是指其内部用户存储器的存储容量。
(正确)10. () FX2N-48MR型PLC的输出形式是继电器触电输出。
(正确)11. ()能直接编程的梯形图必须符合顺序执行,即从上到下。
从左到右地执行。
(正确)12. ()在PLC梯形图中如单个接点与一个串联支路并联,应将串联支路排列在图形的上面,而把单个接点并联在其下面。
(正确)13. ()在PLC梯形图中如单个接点与一个并联支路串联,应将并联支路紧靠右侧母线排列,而把单个接点串联在其左边。
(错误)14. () PLC梯形图中,串联块的并联连接指的是梯形图中由若干接点并联所构成的电路。
(错误)15. ()串联一个常开触点时采用AND指令;串联一个常闭触点时采用LD指令。
(错误)16. ()步进指令中的每个状态器需具备三个在梯形图中,输入触点和输出线圈为现场的开关状态,可直接驱动现场的执行元件。
(错误)17. () PLC步进指令中的每个状态器需具备三个功能:驱动有关负载、指定转移目标、指定转移条件。
机电一体化国赛组装与调试记录题目汇总

机电一体化国赛组装与调试记录题目汇总1. 本次组装与调试的插装机器人,让机械手转动的气动执行元件的名称是,型号为。
(1分)2. 拖动皮带输送机的电动机为电动机,该电动机的磁极对数为,当该电动机的电源频率为50Hz时,其旋转磁场的转速为r/min,改变该电动机的电源频率时,电动机的也改变。
(2分)3. 在插装机器人的插装位置,安装的传感器为,这个传感器的型号为。
(1分)4. 本次组装与调试的插装机器人,使用磁性开关(接近开关)检测气缸中活塞杆的位置,在电路图中,磁性开关的图形符号为。
(0.5分)5. 插装机器人的推送气缸为双作用单出单杆气缸,在气动系统图中,双作用单出单杆气缸的图形符号为。
(0.5分)6. 在电路图中,用图形符号表示,表示。
(1分)7. 本次组装与调试的操作机器人,在上一工位零件进入口附近的一个支架上安装了一个检测光通量小的光纤传感器(检查黑色元件)、一个检测光通量大的光纤传感器(检测白色元件)和一个传感器;当上一工位送来零件A时,能检查到信号的传感器为,当上一工位送来零件B时,能检查到信号的传感器为,当上一工位送来零件C时,能检查到信号的传感器为。
(2分)8. 在本次组装与调试的过程中,测量尺寸用的300mm钢直尺,刻度为0~10mm区间,钢直尺的最小刻度为;刻度为100~300mm 区间,钢直尺的最小刻度为。
(1分)9. 本次组装与调试的插装机器人,使用的变频器输出的额定功率为,输出的频率范围为。
(1分)10. 本次组装与调试的插装机器人,使用的PLC的输入端子数为,输出端子数为。
(1分)11. 将输入继电器X5(西门子为I 0.5)的常开触点串联在某一支路上,使用的指令是;将输出继电器Y5(西门子为Q 0.5)的常闭触点并联在某一支路上,使用的指令是;(1分)12. 驱动计时器T2(西门子为T 0.2)开始计时且设定计时时间为0.5s的指令为;(1分)13. 本次组装与调试的插装机器人,触摸屏与PLC之间通信时,在触摸屏上选择的PLC型号为,选择的通信方式为。
机电一体化设备组装与调试技能比赛全国赛试题

一.按分拣设备部件组装图(见附贞.图号为001)及其宴求和说明,在铝合金工作台上组装“生产狡分拣设备,二.按分拣设备气动系统图(见附页,图号为002)及其娶求和说明,连接-生产找分拣设备的气路.三.请你仔细何读xx生产炭分拣役备的有关说明,然后根摒你片设备及其工作过卷的理解.在賽场提供的图抚(见附塚,图号为003)上,補岀XX生产找分拣设备的电气原理|£,并在标題栏的“设计”和••制图"行填写自己的工位号.四.根掘你話出的电气原理图,连接XX生产线分據设备的电路.电路的导线必须胶入线槽,凡旻你连接的导线,必须参上写有编号的编号笛.五.请你正綸理坍设条的正常工作过程和故障状态的处理方式,编写“ 生产蝮分拣设备的PLC控制程序和没置变频器的参敕.六•请低调整伶感器和位置或灵敏度.调塾机械%件的位廈、完成- 生产线分拣设备的整体调试.使该设备能正常工作,充成物件的加工.分拣和组合.“生产幾分拣役备各都分的名称如图I所示;气动机恢手各部分的名称如3S 2所示.“生产线生产会啟僵柱形和塑科圆柱形冏种元件.该生产践的分拣设备的任务是将金易元件.白色塑料元件和黒色塑料元件进行加工和分拣.一、部件的初始位買启动的,设备的运动部件必须在縄定的位賈、这些位覽称作旳始位豐.有关部件的初 始位豐是:机械手的悬胃靠在右限止位置.手胃气缸的活家杆測回.手殆松开.组合.维辽叽Hi:・"l 斜枷出1七“厂卩•屉r位置A. B. C的气缸活塞杆缩回.处理盘.皮皆输送机的拖动电动机不转动.上述部件庄初始位置时.指示灯HL1以亮Is灭2s方式闪死.只有上述祁件在初始位置时,设备才能启动.若上述部件不在杓始位置,指示灯HLI不亮,请自行选择一种复位方式进行复位.二、设备的正常工作钱適汶令的丄作电稈,丄作合上的红色警用灯闪売,指用电ffuF.t・1.启动按下启动按钮SB5.设备启动.皮带输送机按由位配A向位SLD的方向鬲谗运行,拖动皮带笹送机的三相交流电动机的运行硕率为35 Hz.指示灯HLI 由闪亮受为长亮.2.工作按下启动按钮冶,当元件从进料口执上皮带输送机时,皮带输送机由髙逋运行变为中速运行,此时拖动皮帑綸送机的三相交流电动机的运行频奉为25 Hz.皮带綸送机上的元件到达位覽C时停止3 s进行加工.元件在位賈.C充成加工后,有两种工作方式.两种工作方式只能在设备停止状杰进行转换.工作方K-:转换开关SAI转换旋钮在左位豐.按工作方式一说行.完成加工后.皮带输送机以中速林元件输送到规定位置.若完成加工的是金凰元件,则送达位置A.皮帶输送机停止,由位置A 的气紅活累杆伸出格金屋元件推讲出料轲槽I・然后气缸活塞杆自动端回复位若完成加工的是白色塑料元件,则加工完成后送达位覽B,皮带输送机机停止,由位礎B的气缸活塞杆伸出件白色塑料元件抠洸出料斜槽然后气缸话塞杆自动缩回复位.若加工的元件是黑色壁料元件,则加工完成后送达位置D.皮帶输送机停止.机械手恳暫伸岀-41?下降-手指合拢抓取元件一手習上畀-聂野缩回一机枝手向左转动■•悬件伸出手指松开.元件掉住处理盘内一悬骨缩回一机枝手卑回原位后停止.元件抻入处理盘疳,不旻求盘沆电动机转动.在位置A与B的气缸活塞杆复位和垃就D的元件搬走后,三相交沆电动机的运行频率改受为3 5 H /转动拖动皮帯舱送机由佼足A向位辽D运行. 这旳才可向皮带输送机上放入下一个待加工元件.工作方丈二:转換开关SAI转換線钮也右位置,按工作方式二进疔.n■工作方式二, 黒色塑料元件皱假定为不合榕元件.按工作方丈二进行时:(1)对合格的元件,推入出料斜槽I和口的弟一个元件必麦是金同元件.笫二个为白色塑料元件;元件庄到达被推岀位置时,皮奇榆送机应停止运行.然后气缸活塞杆伸出.将无件推入出料斜珀.气杠活塞杆缩回后. 皮奇输送机又髙速运行、到元件放上皮带输送机变为中連运行.(2)将1个金属元件和1个白色塑料元件推入出料斜稍I (戎出料制ten),两个元件组合后进行包装.在此期何又将I个金码元件和I个白色塑料元件推入岀料(或岀料绑槽I).(3)庄一个出件制槽对元件组合.包装期何.另一个出料斜槽则推入元件,这样自动交阵地进行下夫.直到按下停止按钮.(4)加工后的元件,推入出料料槽I和出料斜槽II的元件不能保it 弟一个是金腸.第二个是白色塑料时,则由位i£c的气虹推入出料斜槽m;(5)对不合格元件(黑色塑料元件),则送到位豐D.在元件到达位賈D,皮带输送机停止运行.机械手悬廿伸岀一手廿下障-手指合拢抓肌元件一手甘上升一悬件缩回■•机械手向左辕动一恳并伸岀一手指松开,元件掉在处理虫内一悬臂缩回一机掖半转回原位后停止.黑色塑料元件掉进处理盘时,唐流电机启动,转动3 s后呼止.3.停止按下停止按钮SB6时,应将当前元件处理速到更定位SL并便相应的都件复位后,设备才能停止.设备11壇新启动之前,应将出轴料槽和建理盘中的元件余走.三、设备的意外情况本次工作任务,仅考虑下列两种憲外情况.1.突然新电发生突然斷电的意外时,应保持冬处住断电瞬何的状态.恢复供电. 指示灯HU按3次/秒的方式闪亮,按下继续运行按钮SB4,设备从断电吗间保持的状态开始,按原来的方式和程序继按运行,同时指示灯HLI变为长亮.2.连按出现不合元件.在工作过程当中,若连找出现3个不合裕元件(黑色电料元件),则在第3个不合搐塑件件被处理盘处理完,且设备返回初始位置后,设备停止工作报警器以声响报讐.按下停止按钮SB6可幣除报帶.只有报讐被解除后,系统才可東新启动.。
中职组机电一体化设备组装与调试赛题(2021国赛)

中职组机电一体化设备组装与调试赛题(2021国赛)2021年全国职业院校技能大赛中职组机电一体化设备组装与调试××售货机组装与调试工作任务书中职组机电一体化设备组装与调试赛项专家组中国・天津 2021・61本次组装与调试的机电一体化设备为售货机。
请你仔细阅读工作任务与要求和售货机的说明,在四小时(240 min)内按要求完成指定的工作。
工作任务与要求一、按《货(钱)仓组装图》(图号为01-03的附页)组装产品售货机的货仓与钱仓。
二、按《售货机部件组装图》(图号为04的附页)和参考《各传感器及支架安装图》(图号为05的附页)组装售货机,并满足图纸提出的技术要求。
三、按《售货机气动系统图》(图号为06的附页)连接售货机的气路,并满足图纸提出的技术要求。
四、根据PLC输入输出端子(I/O)分配(售货机PLC输入输出端子分配表的附页),将售货机电气原理图(图号为07的附页)补画完整并连接电路。
你补画的电气原理图应能实现对售货机的控制,你连接的电路应符合工艺规范要求:五、请你正确理解售货机的运行要求以及异常情况的处理等,编写售货机的PLC控制程序和设置变频器的参数。
注意:在使用计算机编写程序时,请你随时保存已编好的程序,保存的文件名为工位号+A(如3号工位文件名为“3A”)。
六、请你按触摸屏界面制作和监控要求的说明,制作触摸屏的4个界面,设置和记录相关参数,实现触摸屏对售货机的监控。
七、请你调整传感器的位置和灵敏度,调整机械部件的位置,完成售货机的整体调试,使售货机能按照要求自动售货。
八、填写组装与调试记录。
钱仓2 出币口出货口钱仓1 货仓2 货仓1 进币口2售货机说明一、基本情况售货机由货仓、钱币仓、进币口、出币口、出货口等组成,如图1所示。
1. 本售货机共有5种货物。
货仓1中放入白色元件、货仓2中放入黑色元件,用以模拟不同的货物。
货物A,其单价为5元,由货仓1向出货口送出1个元件来模拟。
中职技能大赛机电一体化设备组装调试试题

加工设备的组装与调试一、加工设备情况简介加工设备(以下简称加工设备)是将毛坯(试件为金属件)用机械手搬运到加工传送带上,再由传送到各加工位置进行加工的设备。
该加工设备由毛坯放置台,气动机械手,皮带输送机等部件组成,各部件和一些主要元件的名称。
将需要加工的毛坯放在毛坯放置台上,由机械手搬运,通过皮带输送机的进料孔放上传送带,由皮带输送机将毛坯传送到工作位置1时停止,进行第一道工序的加工。
再由皮带输送机将工件(毛坯经加工但还没有完成加工的物件,称作工件)传送到工作位置2,进行第二道工序的加工。
然后皮带输送机反向运转,将工件送回位置1,进行第三道工序的加工。
毛坯经三道工序加工,成为产品,由皮带输送机将其传送到位置2,由气缸B 活塞杆伸出,将产品推入出料斜槽2.加工设备完成一个产品的加工后,紧接着完成下一个产品的加工。
二、加工设备的动作和控制要求接通加工设备的电源前,应将动作过的保护元件的触点复位,并使机械手处于左极限位置和各气缸活塞杆处于缩回的位置。
1、毛坯完好(试件为金属件)时,加工设备的动作。
接通电源后,若保护元件触点的状态、机械手和各气缸活塞杆的位置正确,按下启动按钮,指示灯亮,设备开始工作。
在毛坯放置台的光电传感器检测到有毛坯时,气动机械手悬臂伸出—手臂下降---气爪将工件加紧。
夹紧1秒后,手臂上升---悬臂缩回---转动至右侧极限位置---然后悬臂伸出---手臂下降---气爪放松,通过进料孔将工件放到皮带输送机的传送带上。
机械手放下夹持的工件1秒后,手臂上升—悬臂缩回---转动至左侧极限位置停止。
当皮带输送机进料孔位置的漫射型光电传感器检测到工件后,指示灯熄灭,拖动皮带输送机的交流电动机以25HZ的频率启动,皮带输送机中速运转传送毛坯。
当毛坯运行到工作位置1时,皮带输送机停止3秒,进行第一道工序的加工。
完成毛坯加工,拖动皮带输送机的交流电动机以15HZ的频率启动,皮带输送机低速运转传送被加工过的工件到工作位置2时,停止3秒,进行第二道工序的加工。
2023年机电一体化设备组装与调试试新版题库
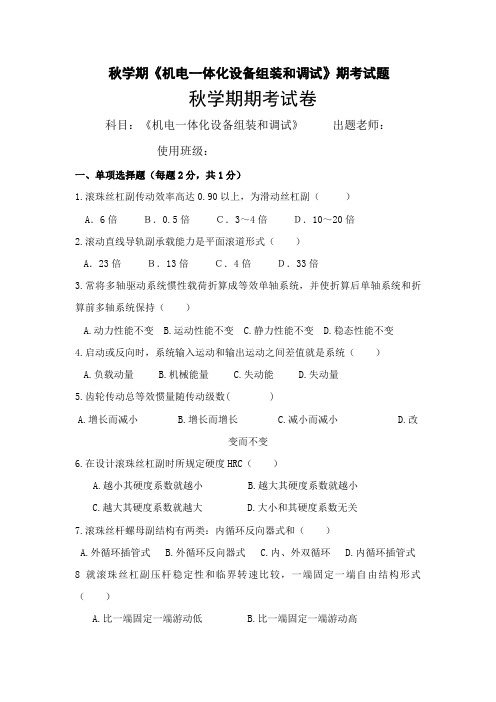
秋学期《机电一体化设备组装和调试》期考试题秋学期期考试卷科目:《机电一体化设备组装和调试》出题老师:使用班级:一、单项选择题(每题2分,共1分)1.滚珠丝杠副传动效率高达0.90以上,为滑动丝杠副()A.6倍B.0.5倍C.3~4倍D.10~20倍2.滚动直线导轨副承载能力是平面滚道形式()A.23倍B.13倍C.4倍D.33倍3.常将多轴驱动系统惯性载荷折算成等效单轴系统,并使折算后单轴系统和折算前多轴系统保持()A.动力性能不变B.运动性能不变C.静力性能不变D.稳态性能不变4.启动或反向时,系统输入运动和输出运动之间差值就是系统()A.负载动量B.机械能量C.失动能D.失动量5.齿轮传动总等效惯量随传动级数( )A.增长而减小B.增长而增长C.减小而减小D.改变而不变6.在设计滚珠丝杠副时所规定硬度HRC()A.越小其硬度系数就越小B.越大其硬度系数就越小C.越大其硬度系数就越大D.大小和其硬度系数无关7.滚珠丝杆螺母副结构有两类:内循环反向器式和()A.外循环插管式B.外循环反向器式C.内、外双循环D.内循环插管式8就滚珠丝杠副压杆稳定性和临界转速比较,一端固定一端自由结构形式()A.比一端固定一端游动低B.比一端固定一端游动高C.和一端固定一端游动相等D.为最高9.对步进电动机进给系统中齿轮传动装置进行传动比分派标准是( )A.最大负载惯量标准B.最小负载惯量标准C.最大负载转矩标准D.最小负载转矩标准 10.据齿轮系传动比最佳分派条件,简化最佳速比分派关系为( )A.2212i i =B. 2212i i =C. 212i i =D. 212i i =11.偏心轴套调整法是采用偏心轴套旋转来改变( )A.两齿轮轴向位移量以消除齿侧间隙B.齿轮之间中心距以消除齿侧间隙C.两齿轮相对旋转角位移消除间隙D.两薄片齿轮之间垫片厚度以消除间隙 12.滚动摩擦系数几乎和运动速度无关,其动摩擦力和静摩擦力之差( )A.极大B.极小C.为零D.为无穷大 13.在开环步进电机-丝杠系统中,传动比大小和系统步进电机( )A.转动角相关B.步距角相关C.失调角相关D.控制角相关 14.滚珠丝杠螺母副结构类型有两类:外循环插管式和( )A.内循环插管式B.外循环反向器式C.内、外双循环D.内循环反向器式15.齿轮传动机构采用消隙方法,可以消除齿侧间隙及其导致( ) A.换向误差 B.换向死区 C.换向冲击 D.换向阻力 16.滚珠丝杠副可以将直线运动变为( )A.旋转运动B.直线运动C.螺旋运动D.正弦运动 17.工作机械负载特性是工作机械在运营过程中( ) A.运营阻力和转速关系 B.运动质量和转速关系 C.功率和转速关系 D.运动惯性和转速关系18.负载转动惯量由实行部件和上面装夹具、工件或刀具、滚珠丝杠、联轴器等直线和旋转运动部件质量或惯量折合到( )A.齿轮轴上惯量组成B.输出轴上惯量组成C.电动机轴上惯量组成D.丝杠轴上惯量组成19.齿轮传动总等效惯量随传动级数( )A.增长而减小B.增长而增长C.减小而减小D.改变而不变20.滚珠丝杠副螺纹滚道型面截面形状有()A.单圆弧型面和抛物线型面B.双圆弧型面和椭圆弧型面C.抛物线型面和椭圆弧型面D.单圆弧型面和双圆弧型面21.导轨截面为矩形截面滚动导轨承载时其受力()A.上下方向相等但左右不等B.上下左右各方向大小相等C.上下方向不相等但左右相等D.上下左右各方向大小均不相等22.启动或反向时,系统输入运动和输出运动之间差值就是系统()A.定位误差B.系统误差C.静态误差D.死区误差23.在设计滚珠丝杠副时工作()A.越平稳所选载荷系数越大B.条件越恶劣所选载荷系数越小C.条件越恶劣所选载荷系数越大D.条件情况和载荷系数选择无关24.滚珠丝杠副为单圆弧型面螺纹滚道时,其接触角随轴向负荷()A.增大而减小B.增大而增大C.减小而增大D.减小而减小25.在开环步进电机-丝杠系统中,齿轮副传动装置传动比大小和系统()A.丝杠长度相关B.导轨长度相关C.丝杠导程相关D.导轨刚度相关26.在设计滚动导轨副时滑座()A.运动速度越小所选载荷系数越大B.运动速度越大所选载荷系数越大C.运动无冲击时所选载荷系数越大D.运动情况和载荷系数选择无关27.滚珠丝杠副为双圆弧型面螺纹滚道时,其接触角()A.随轴向负荷改变而改变B.随径向负荷改变而改变C.不随轴向负荷而改变D.不随径向负荷改变而改变28.摩擦力引发死区误差实质上是在驱动力作用下,传动机构为克服静摩擦力而产生( )A.弹性变形B.局部变形C.屈服变形D.塑性变形 29.在开环步进电机-丝杠系统中,齿轮副传动装置传动比大小和系统( ) A.丝杠长度相关 B.导轨长度相关 C.丝杠导程相关 D.导轨刚度相关 30.摩擦力引发死区误差实质上是在驱动力作用下,传动机构为克服( )A.动摩擦力而产生弹性变形B.静摩擦力而产生弹性变形C.惯性力而产生弹性变形D.负载力而产生弹性变形 31.在设计滚动导轨副时其滑座( )A.运动速度越小所选载荷系数越大B.运动速度越大所选载荷系数越小C.运动情况和载荷系数选择无关D.运动速度越大所选载荷系数越大 32.计算齿轮传动系统时非随机载荷采用( )A.方和根综合法B.回归分析综合法C.峰值综合法D.正交实验法33.数字式传感器检测系统传感器输出信号为( ) A.模拟信号 B.电流信号 C.电压信号 D.增量码信号 34.频率调制是让一个高频载波信号频率随( ) A.调制信号而改变过程 B.调幅信号而改变过程 C.载波信号而改变过程 D.调频信号而改变过程 35.滤波器截止频率是指滤波器幅频特性值等于( ) A. K 2所相应频率 B. 2K所相应频率C. 2K 所相应频率 D. K 2所相应频率36.光栅栅距为0.02mm ,则通过四细分后,每个计数脉冲代表位移量为( )A.0.05mm B.0.005mm C.0.5mm D.5mm37.当传感器输出信号是电参量形式时,需要采用基础转换电路将其转换成()A.电压量后再送入后续检测电路B.电容量后再送入后续检测电路C.电感量后再送入后续检测电路D.电阻量后再送入后续检测电路38.小信号双线变送器是将现场薄弱信号转化为4~20mA标准电流输出,然后通过一对双绞线传送信号以()A.实现强电信号和弱电信号隔离B.实现信号和电源一起传送C.实现信号幅度线性调制和解调D.实现信号脉宽调制和解调39.调频波解调可以先将调频波变换成()A.调幅波后进行幅值检波B.调频波后进行幅值检波C.调频调幅波后进行幅值检波D.调相调幅波后进行幅值检波40.旋转变压器转子相对定子位置通过测量出转子绕组中感应电动势()A.相位来拟定B.频率来拟定C.幅值来拟定D.脉宽来拟定41.当传感器输出信号是电参数形式时,需要采用基础转换电路将其转换成()A.电阻形式 B. 电容形式 C.脉冲形式 D.电量形式42.线性调幅就是让载波()A.幅值随调制信号按线性规律改变B.频率随调制信号按线性规律改变C.相位随调制信号按线性规律改变D.阻尼比随调制信号按线性规律改变43.绝对值检测电路特点是将交变()A.连续信号变换为离散信号B.直流信号变换为交流信号C.双极性信号变换为单极性信号D.模拟信号变换为数字信号44.旋转变压器鉴相工作方法是依据旋转变压器转子绕组中感应电动势()A.频率来拟定被测位移大小方法B.相位来拟定被测位移大小方法C.幅值来拟定被测位移大小方法D.脉宽来拟定被测位移大小方法45.将传感器输出信号电参数形式信号转换成电量形式信号需要采用()A.闭环控制电路B.反馈控制电路C.基础转换电路D.功率放大电路46.隔离放大器信息传输可以通过()A.电阻直通实现B.电桥整流实现C.放大电路实现D.磁路实现 47.滤波器截止频率是指滤波器幅频特性值等于( )A.K 2所相应频率B.2K所相应频率C.2K 所相应频率 D.K 2所相应频率48.旋转变压器鉴幅式工作方法是通过检测转子绕组中感应电动势( ) A.相位来拟定被测位移大小方法 B.频率来拟定被测位移大小方法 C.幅值来拟定被测位移大小方法 D.脉宽来拟定被测位移大小方法 49. n 细分是指使传感器输出改变( )A.1/(n+1) 周期时计一个数B.1/n 周期时计一个数C.n 周期时计一个数D.n +1周期时计一个数 50.共模克制比就是( )A.共模增益和差模增益之比B.闭环增益和开环增益之比C.开环增益和闭环增益之比D.差模增益和共模增益之比秋学期《机电一体化设备组装和调试》期考试题答题卡年级:出题老师:班别_______________ 姓名_______________分数_____________ 一、选择题(每题2分,共100分)秋学期《机电一体化设备组装和调试》期考技能试题秋学期技能期考任务书科目:《机电一体化设备组装和调试》出题老师:班级:姓名:总分:配分任务3:变频器设立(15)(1)按规定连接变频器控制电路;(2)设立变频器相应参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机电一体化设备的组装与调试模拟训练试题六
考试日期2009-3-31
考试用时180分钟
开考时间
考生工位号
本试题共5页
悬臂 手臂
手指 气动马
立柱
右限止
左限止位置 请你在3h 内,按要求完成下列工作任务
一、按送料分拣设备部件组装图及其要求和说明,在铝合金工作台上组装××生产线送料分拣设备。
二、按送料分拣设备气动系统图及其要求和说明,连接××生产线送料分拣设备的气路。
三、请你仔细阅读××生产线送料分拣设备的有关说明,然后根据你对设备及其工作过程的理解,画出××生产线送料分拣设备的电气原理图,并在标题栏的“设计”和“制图”行填写自己的工位号。
四、根据你画出的电气原理图,连接××生产线送料分拣设备的电路。
电路的导线必须放入线槽。
五、请你正确理解设备的正常工作过程和故障状态的处理方式,编写××生产线送料分拣设备的PLC 控制程序和设置变频器的参数。
六、请你调整传感器和位置或灵敏度,调整机械零件的位置,完成××生产线送料分拣设备的整体调试,使该设备能正常工作,完成物件的加工、分拣和组合。
××生产线分拣设备
一、部件的初始位置及组装结构图
启动前,设备的运动部件必须在规定的
位置,这些位置称作初始位置。
有关部件的
初始位置是:
机械手的悬臂靠在右限止位置,手臂气缸的活塞杆缩回,手指松开。
位置
一、二、三的气缸活塞杆缩回。
处理盘、皮带输送机的拖动电动机不转动。
上述部件在初始位置时,工作台红色指示灯以亮1 s 灭2 s 方式闪亮。
只有上述部件在初始位置时,设备才能启动。
若上述部件不在初始位置,指示灯不亮,请自行选择一种复位方式进行复位。
二、设备试运行
试运行时按下试运行按钮SB4,工作台上的红色试运行指示灯闪亮,试运行时机械手先从原位依次按下降→抓紧→上升→缩回→右转→伸出→下降→松开→上升→缩回→左转→伸出的顺序动作,然后推料气缸按照气缸A 伸出→气缸A 缩回→气缸B 伸出→气缸B 缩回的顺序动作。
当气缸B 缩回到位后,三相交流异步电动机以35 Hz 的频率启动,拖动皮带输送机向前运行3 s 停止,(规定往右边运动为向前运行)。
皮带输送机停止后试运行指示灯灭。
系统完成试运行。
位置二和三光纤式传感器 位置一 电感式 传感器 落料口光电传感器 物料检
测台及
传感器
料槽一 料槽二 料槽三
三、设备的正常工作
按下起动按钮SB5时,设备起动。
工作指示灯HL4亮,落料口允许放料指示灯HL5亮。
供料盘电机开始转运,当供料盘物料检测传感器检测到有料时转盘电机停止转动,同时启动机械手搬运物料到传送带落料孔中放于传送带上,然后机械手自动返回原位开始搬运下一个物料。
分拣加工及组合要求:
1.当落料口检测传感器检测到有物料时,变频器驱动三相电动机以20HZ 运转,允许放料指示灯HL5灭,皮带将物料进行传送(皮带上只允许有一个物料),若第一个物料为金属料时,到达位置一,皮带停止,加工3秒,输送带再以30HZ将物料传送到位置三加工3秒后,输送带再以20HZ反转到位置二加工2秒,然后位置二气缸将物料推入斜槽二,活塞杆缩回到位后,皮带再以20HZ正转运行,若第二个还是金属,则直接打入斜槽三。
若第一个零件为白色,到位置二处检测到后,加工2秒,输送带再以30HZ正转到位置三,加工3秒,再以20HZ反转到位置一,位置一气缸将零件推入斜槽一,若第二个还是白色塑料,则直接打入斜槽三。
若放入的零件为黑色塑料,当位置一或位置二料槽无金属或白色物料,则黑色物料直接被推入料槽三中,否则输送带运送物料到位置三后加工3秒,输送带再以20HZ反转到位置一或位置二,此处气缸将零件推入料槽一或料槽二中(第一个零件若是白色,则其推入斜槽一。
若为金属,则推入料槽二,若满足组合条件两处料槽交替推入黑料)。
2.斜槽一中当推入一个白色和一个黑色物料时就将它们组合成一个器
件;斜槽二中当推入一个金属和一个黑色物料时就将它们组合成一个器件。
器件的组合过程需要5秒,此时蜂鸣器以1秒响三次的方式进行指示。
在器件组合过程中,皮带上禁止放料,放料指示灯HL5以1秒3次闪烁,当组合完成后才可继续放料,落料口检测传感器检测到有物料,HL5灭。
四、停止
按下停止按钮SB6时,应将当前元件处理送到规定位置并使相应的部件复位后,设备才能停止,设备停止运行后工作指示灯HL4灭。
五、设备的意外情况
1.发生突然断电的意外时,应保持各处在断电瞬间的状态。
恢复供电,指示灯HL1按3次/秒的方式闪亮,按下运行按钮SB5,设备从断电瞬间保持的状态开始,按原来的方式和程序继续运行,同时指示灯HL1变为长亮。
2.紧急停止:在设备工作过程中,只要压下急停按钮QS,运行指示灯HL4熄灭,设备立即停止工作,指示灯HL6以2次/秒的方式闪烁报警。
在紧急停止过程中,如果有工件停在皮带输送机上,则工件一律视为废品处理,QS复位后,自行设计适当的处理流程进行处理,在该流程结束后,设备应接着紧急停止前所处的工作周期运行。
六、缺料指示:
1.若落料口在10秒内没有放料,则指示灯HL1以2次/秒的方式闪烁报警,直到有物料检测到为止。
2. 转盘电机供料10秒后,物料检测传感器仍未检测到有物料,则指示灯
HL2以1秒3次的方式闪烁,直到有物料检测到为止。