实验指导书(7)-步进电机控制
实验步进电机控制实验

实验步进电机控制实验一、实验目的掌握步进电机的工作原理和控制方法二、实验设备1、EL-MUT-III型单片机实验箱2、8051CPU模块3、电机综合模块三、实验内容单片机通过244设置步进电机运行的步数和方向,并显示在数码管上,同时驱动电机按照设定的步数和方向转动,同时在数码管上显示电机的实际转动步数。
四、实验原理步进电机工作原理见模块说明书,控制电路如下图:五、实验步骤1、实验连线:P1口的P1.0---P1.3分别接模块上的A、B、C、D。
CS244接CS0,244的输入IN0--IN7接平推开关KK1--KK8的输入K1--K8。
P1.7接单脉冲输出P-。
2、运行Keil C运行环境,打开Step4文件夹下的Step4.uv2,检查工程的Debug 参数设置是否正确,然后全速运行,数码管的左两位显示设定的步数(16进制),可以通过改变平推开关kk1—kk7的状态设定不同的运行步数,改变kk8的状态可改变电机的转动方向,在数码管上当数值位的小数点位点亮时,表示为逆时针方向,否则为顺时针方向。
完成设置后,按动单脉冲开关Pules,电机按照设定的方向和步数开始转动,同时在数码管的右侧显示电机的转动步数,当达到设定值时,电机停止转动。
3、观察步进电机的运动与设定值是否一致。
六、实验结果输入运行步数N,电机运行N步后停止,且方向与设定方向一致。
七、程序框图实验直流电机调压调速实验一、实验目的掌握直流电机测速和调速的工作原理二、实验设备1、EL-MUT-III型单片机实验箱2、8051CPU模块3、电机综合模块三、实验内容电机每转一周,SIGNAL端产生一如图所示的脉冲,通过用INT0检测该脉冲的高电平,并从P10输出输出一8253的GATA信号来控制8253计数器的启停。
通过8253的计数值计算转速,转速值经主机箱RS232串口送至PC机,在PC机上进行PID计算,计算结果通过串口送给CPU,经D/A转换成电压,控制电机转速。
实验指导书(7)-步进电机控制

实验七步进电机控制一、实验目的1、掌握PLC功能指令的用法2、掌握用PLC控制步进电机的方法二、实验器材1. DICE-PLC01型可编程序控制器实验台/箱l台2. 编程电缆l根3. 连接导线若干三、实验内容及步骤1、步进电机的工作原理步进电也称为脉冲电机,它可以直接接收来自计算机的数字脉冲,使电机旋转过相应的角度。
步进电机在要求快速启停,精确定位的场合做为执行部件,得到了广泛采用。
四相步进电机的工作方式:*单相四拍工作方式,其电机控制绕组A、B、C、D相的正转通电顺序为:A→B→C→D→A;反转通电顺序为:A→D→C→B→A。
*四相八拍工作方式,正转的绕组通电顺序为:A→AB→B→BC→C→CD→D→DA→A;反向的通电顺序为:A→AD→D→DC→C→CB→B→BA→A。
*双四拍工作方式,正转的绕组通电顺序为:AB→BC→CD→DA→AB;反向的通电顺序为:AB→AD→DC→CB→BA。
步进电机有如下特点:给步进脉冲电机就转,不给步进脉冲电机就不转;步进脉冲的频率越高,步进电机转得越快;改变各相的通电方式,可以改变电机的运行方式;改变通电顺序,可以控制电机的正、反转。
2、设计要求(1)控制模块中的步进电机工作方式为四相八拍,电机的四相线圈分别用A、B、C、D表示,公共端已接地。
当电机正转时,其工作方式如下:A→AB→B→BC→C→CD→D→DA→A。
当电机反转时,其工作方式如下:A→-AD→D→DC→C→CB→B→BA→A。
设计程序,要求能控制步进电机正反转,并能控制它的转速。
(2)设置以下控制按钮:启动、停止按钮;正、反转控制按钮;快速、慢速控制按钮。
步进电机的脉冲可用逐位移位指令循环移位来实现,其脉冲频率可通过控制逐位移位指令的移位脉冲来调节,而移位脉冲可用两个定时器组合来完成,要改变脉冲频率,只要改变定时器设定值即可。
(3)程序运行后,首先选择正、反转按钮,然后选择快、慢速按钮,最后按下“启动”按钮,电机便会按照按钮的选择控制来工作。
步进电机控制技术综合实验-指导书2013-10
机械设计制造及其自动化专业实验——机电控制实验步进电机控制技术综合实验————可编程控制器控制滑台的速度、位置实验指导书重庆理工大学重庆汽车学院实践教学及技能培训中心2012年10月学生实验守则1.学生应按照实验教学计划和约定的时间,准时上实验课,不得迟到早退。
2.实验前认真阅读实验指导书,明确实验目的、步骤、原理,预习有关的理论知识,并接受实验教师的提问和检查。
3.进入实验室必须遵守实验室的规章制度。
不得高声喧哗和打闹,不准抽烟、随地吐痰和乱丢杂物。
4.做实验时必须严格遵守仪器设备的操作规程,爱护仪器设备,服从实验教师和技术人员指导。
未经许可不得动用与本实验无关的仪器设备及其它物品。
5.实验中要细心观察,认真记录各种试验数据。
不准敷衍,不准抄袭别组数据,不得擅自离开操作岗位。
6.实验时必须注意安全,防止人身和设备事故的发生。
若出现事故,应立即切断电源,及时向指导教师报告,并保护现场,不得自行处理。
7.实验完毕,应主动清理实验现场。
经指导教师检查仪器设备、工具、材料和实验记录后方可离开。
8.实验后要认真完成实验报告,包括分析结果、处理数据、绘制曲线及图表。
在规定时间内交指导教师批改。
9.在实验过程中,由于不慎造成仪器设备、器皿、工具损坏者,应写出损坏情况报告,并接受检查,由领导根据情况进行处理。
10.凡违反操作规程,擅自动用与本实验无关的仪器设备、私自拆卸仪器而造成事故和损失的,肇事者必须写出书面检查,视情节轻重和认识程度,按学院有关规定予以赔偿。
重庆理工大学说明1.同学可以登录学校的“实验选课系统”(从学校首页登陆:或从数字校园登录),自己进行实验项目的选择。
希望同学们能在每个实验项目开放的时间内尽早进行实验预约(预约时间必须比实验上课时间提前3天),因为学生数量比较多,如果某实验项目开放的时间内同学未能进行实验预约,则错过该实验项目的实验机会,补做就要在该实验项目下一次开放时进行。
2.如有什么问题,同学可以拨打电话62563127联系张君老师。
步进电机控制实训报告

一、实训背景随着科技的飞速发展,步进电机在工业自动化、精密定位、医疗设备等领域得到了广泛的应用。
为了深入了解步进电机的原理和应用,提高自身的动手实践能力,我们进行了步进电机控制实训。
二、实训目标1. 理解步进电机的原理和工作方式。
2. 掌握步进电机的驱动方法和控制方法。
3. 学会使用单片机对步进电机进行编程和控制。
4. 提高团队协作能力和问题解决能力。
三、实训内容1. 步进电机原理步进电机是一种将电脉冲信号转换为角位移或线位移的执行元件。
其特点是响应速度快、定位精度高、控制简单。
步进电机每输入一个脉冲信号,就转动一个固定的角度,称为步距角。
步距角的大小取决于电机的结构,常见的步距角有1.8度、0.9度等。
2. 步进电机驱动步进电机的驱动通常采用步进电机驱动器。
驱动器将单片机输出的脉冲信号转换为驱动步进电机的电流信号,实现对步进电机的控制。
常见的驱动器有L298、A4988等。
3. 单片机控制本实训采用AT89C51单片机作为控制核心。
通过编写程序,控制单片机输出脉冲信号,实现对步进电机的正转、反转、停止、速度等控制。
4. 实训步骤(1)搭建步进电机驱动电路,连接单片机、步进电机、按键等外围设备。
(2)编写程序,实现以下功能:- 正转、反转控制;- 速度控制;- 停止控制;- 按键控制。
(3)使用Proteus仿真软件进行程序调试,验证程序的正确性。
(4)将程序烧录到单片机中,进行实际硬件测试。
四、实训结果与分析1. 正转、反转控制通过编写程序,实现了对步进电机的正转和反转控制。
在Proteus仿真软件中,可以观察到步进电机按照设定的方向转动。
2. 速度控制通过调整脉冲信号的频率,实现了对步进电机转速的控制。
在Proteus仿真软件中,可以观察到步进电机的转速随脉冲频率的变化而变化。
3. 停止控制通过编写程序,实现了对步进电机的停止控制。
在Proteus仿真软件中,可以观察到步进电机在停止信号后立即停止转动。
步进电机实验指导书(WORD2003版)

2/5
2.步进电机 本装置所选用的两相混合式步进电机及驱动器是北京四通公司的产品, 也是 目前市场上比较通用的一款产品。它采用控制电源及驱动电源分开的供电方式, 带有一个高速脉冲信号接收端及方向信号接收端。步进电机驱动器可提供整步、 改善半步、4细分、8细分、16细分、32细分和64细分七种运行模式,利用驱动 器面板上六位拨码开关的第1、2、3 三位可组合出不同的状态。也可以根据负 载的不同选择不同的输出电流,利用拨码开关的第4、5、6 三位组合出不同的电 流输出值。
1/5
基本信息 时间:2012-11-21(周三) 08:30-12:10(4 个学时) 2012-11-22(周四) 08:30-12:10 2012-11-22(周四) 14:30-18:10 地点:实验楼 A403 分组:09 电气(91 人)分三组: 第一组第 1-30 人,第二组第 31-60 人,第三组第 61-91 人 概述 本实验指导书包括如下主要内容: 1、产品介绍 2、实验一 PLC 控制步进电机的正反转 3、实验二 PLC 控制步进电机的运行状态 产品介绍 本实验装置主要包括三菱可编程序控制器 (PLC) FX2N-32MT 主机和 FX2N-2AD 模拟量输入模块、FX2N-485BD 通讯模块;步进电机和步进电机驱动器。 1. 可编程序控制器(PLC) 三菱可编程序控制器(PLC)是日本三菱电机工业有限公司自行研发和制造 的自主产品,根据功能的不同分为 FX0N 系列、FX1N 系列、FX2N 系列、Q 系列 等;根据输出方式的不同又分为 MT(晶体管)输出和 MR(继电器)输出。 FX2 系列可编程序控制器是日本三菱公司继 F1、F2 系列可编程序控制器之 后推出的新产品。它采用整体式结构,按功能可分为基本单元、扩展单元、扩展 模块及特殊适配器等四种类型产品。 基本单元内有 CPU、 存储器、 输入/输出(I/O)、 电源等,是一个完整的 PC 机,可以单独使用。 基本单元型号表示方法如下: FX2-××M× | | 1 2 式中,1 部分用两位数表示输入/输出(I/O)的总点数,有 16、24、32、48、 64 和 80 六种;2 部分用字符表示输出类型:R 表示继电器触点输出,T 表示晶体 管输出,S 表示双向晶闸管输出。 例如,FX2-32MR 表示是 FX2 系列的基本单元,输入/输出(I/O)总点数为 32 点,其中 16 点为直流 24 V 输入,16 点为继电器输出。 FX2 系列输入类型为直流输入,采用直流 24 V 或交流 220V 供电。输出类型 有继电器、晶体管、双向晶闸管三种输出形式。继电器输出可靠性高,价格低, 适用电压范围广,既可控制交流负载又可控制直流负载,因而使用广泛;但因为 有触点输出,尤其在感性负载时继电器触点寿命较短,动作响应时间较长(10 ms 以下),因而不适应要求高速通断、快速响应的工作场合。晶体管输出是无触点 输出,动作响应时间短(0.5 ms 以下),用于控制直流负载。双向晶闸管输出亦是 无触点输出,动作响应时间较短,用于控制交流负载。晶体管和双向晶闸管输出 过载、 过压能力较差, 价格高, 因而适应于要求高速通断、 快速响应的工作场合。 我们使用的是 FX2N32MT 的主机,即输入/输出(I/O)总点数为 32 点,其中 16 点 为直流 24 V 输入,16 点为晶体管输出。
步进电机控制、数字滤波器实验
步进电机控制实验一、实验目的1.了解步进电机的工作原理。
2.掌握步进电机的驱动和编程方法。
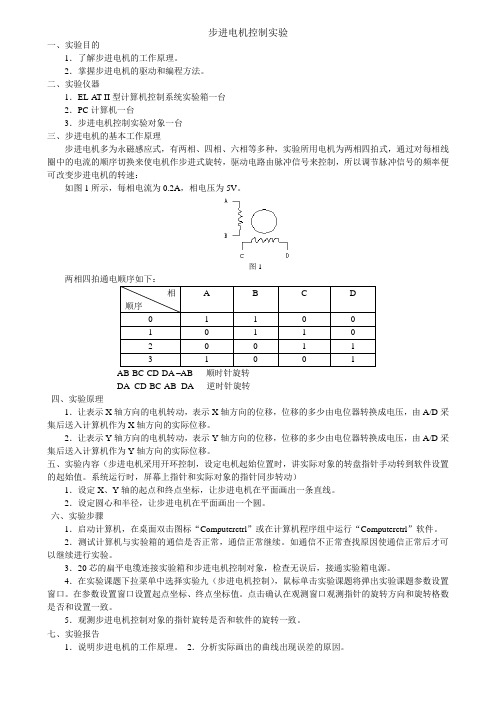
二、实验仪器1.EL-AT-II型计算机控制系统实验箱一台2.PC计算机一台3.步进电机控制实验对象一台三、步进电机的基本工作原理步进电机多为永磁感应式,有两相、四相、六相等多种,实验所用电机为两相四拍式,通过对每相线圈中的电流的顺序切换来使电机作步进式旋转,驱动电路由脉冲信号来控制,所以调节脉冲信号的频率便可改变步进电机的转速:如图1所示,每相电流为0.2A,相电压为5V。
图1AB-BC-CD-DA –AB 顺时针旋转DA -CD-BC-AB- DA 逆时针旋转四、实验原理1.让表示X轴方向的电机转动,表示X轴方向的位移,位移的多少由电位器转换成电压,由A/D采集后送入计算机作为X轴方向的实际位移。
2.让表示Y轴方向的电机转动,表示Y轴方向的位移,位移的多少由电位器转换成电压,由A/D采集后送入计算机作为Y轴方向的实际位移。
五、实验内容(步进电机采用开环控制,设定电机起始位置时,讲实际对象的转盘指针手动转到软件设置的起始值。
系统运行时,屏幕上指针和实际对象的指针同步转动)1.设定X、Y轴的起点和终点坐标,让步进电机在平面画出一条直线。
2.设定圆心和半径,让步进电机在平面画出一个圆。
六、实验步骤1.启动计算机,在桌面双击图标“Computerctrl”或在计算机程序组中运行“Computerctrl”软件。
2.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
3.20芯的扁平电缆连接实验箱和步进电机控制对象,检查无误后,接通实验箱电源。
4.在实验课题下拉菜单中选择实验九(步进电机控制),鼠标单击实验课题将弹出实验课题参数设置窗口。
在参数设置窗口设置起点坐标、终点坐标值。
点击确认在观测窗口观测指针的旋转方向和旋转格数是否和设置一致。
5.观测步进电机控制对象的指针旋转是否和软件的旋转一致。
机电一体化系统设计课程实验指导书
机电一体化系统设计课程实验指导书(可编程控制器原理及工程应用)实验一步进电机控制实验一、实验目的1、掌握步进电机工作原理;2、熟悉对步进电机转向、速度、行程进行控制的方法。
二、实验要求1、通过实验,加深并验证学过的理论知识,掌握实验的基本方法和实验原理;2、正确使用仪器设备;3、认真观察仪器设备的运动方式,独立编写控制程序并进行操作。
4、学生在实验过程中,应学会独立思考,应用所学专业理论知识分析和解决实验中遇到的具体问题;三、实验原理1、步进电机工作原理步进电机按工作原理可分为电磁式、磁阻式、永磁式、混合式四类。
其中混合式步进电机从定子或转子的导磁体来看,它如反应式步进电机,所不同的是它的转子上置有磁钢,反应式转子则无磁钢。
从它的磁路内含有永久磁钢这一点来说,又可以说它是永磁式,但因其结构不同,使其作用原理及性能方面,都与永磁式步进电机有明显区别。
它好像是反应式和永磁式的结合,所以常称为混合式。
混合式步进电机具有驱动电流小,效率高,过载能力强、控制精度高等特点,是目前市面上应用最为广泛的一种步进电机。
左图是两相混合式步进电机的剖面示意图。
定子上有两个等分的磁极,相邻两个磁极间的夹角为90°。
磁极上面装有控制绕组且联成A、B两相,转子上均匀分布两个齿,齿间距为180°。
以A、B表示两相绕组正向电流工作,、表示反向电流工作,可实现:1、两相激励四拍整步运行方式,即AB→B→→A 或单相激励的四拍运行方式,即A→B→ → 。
2、八拍半步运行方式,即AB→B→ B→ →→→A→A。
两相混合式步进电机剖面示意图此外还有1/4步距的运行方式、微步距控制运行方式,这里不一一叙述。
本节以八拍半步运行方式为例,讲述其工作原理,从下图可看出,(a)图为当A、B两相同时正向通电时,转子受到两相转矩的矢量和而转至该位置,(b)图为B相通电瞬间时转子的受力情况,(c)图为A相接反向电流,而B相接正向电流时转子受到两相转矩的矢量和而转到该位置,依此类推,可得出八拍半步运行方式(图中只给出了前三拍运行方式)。
步进电机控制
步进电机控制一、实验目的⑴了解步进电机控制的基本原理。
⑵掌握步进电机转动编程方法。
二、实验内容用8255P A0~P A3输出脉冲信号,驱动步进电机转动。
三、实验预备知识步进电机驱动原理是通过对它每组线圈中的电流的顺序切换来使电机作步进式旋转,驱动电路由脉冲信号为控制,所以调节脉冲信号的频率便可改变步进电机的转速。
微电脑控制步进电机最适合。
四、考参程序CODE SEGMENTASSUME CS:CODE,DS:CODE,ES:CODEIOCONPT EQU 0FFDBHIOBPT EQU 0FFD9HIOAPT EQU 0FFD8HORG 3620HH12: MOV AL,88HMOV DX,IOCONPTOUT DX,ALNOPNOPNOPIOLED1: MOV DX,IOAPTMOV AL,03HOUT DX,ALCALL XDELAYMOV AL,06HOUT DX,ALCALL XDELAYMOV AL,0CHOUT DX,ALCALL XDELAYMOV AL,09HOUT DX,ALCALL XDELAYMOV AL,03HOUT DX,ALCALL XDELAYMOV AL,06HOUT DX,ALCALL XDELAYMOV AL,0CHOUT DX,ALCALL XDELAYMOV AL,09HOUT DX,ALCALL XDELAYJMP IOLED1XDELAY: MOV CX,03FFFHXDELA: LOOP XDELARETCODE ENDSEND H12五、实验步骤⑴按实验电路图连接线路:①8255P A0~P A3依次连到步进电机区的B A~B D插孔。
②步进电机接插头J3插座(一体机已连)。
⑵运行实验程序:在系统处于命令提示符“P.”状态下,输入3620,按E X E C键。
⑶观察电机转动情况。
控制步进电机实验报告(3篇)
第1篇一、实验目的1. 理解步进电机的工作原理及控制方法。
2. 掌握单片机与步进电机驱动模块的接口连接方法。
3. 学习使用C语言编写程序,实现对步进电机的正反转、转速和定位控制。
4. 通过实验,加深对单片机控制系统的理解。
二、实验原理步进电机是一种将电脉冲信号转换为角位移或线位移的电机,其特点是控制精度高、响应速度快、定位准确。
步进电机控制实验主要涉及以下几个方面:1. 步进电机驱动模块:常用的驱动模块有ULN2003、A4988等,它们可以将单片机的数字信号转换为步进电机的控制信号。
2. 单片机:单片机是整个控制系统的核心,负责接收按键输入、处理数据、控制步进电机驱动模块等。
3. 步进电机:步进电机分为单相、双相和三相等类型,本实验使用的是双相四线步进电机。
三、实验设备1. 单片机开发板:例如STC89C52、STM32等。
2. 步进电机驱动模块:例如ULN2003、A4988等。
3. 双相四线步进电机。
4. 按键。
5. 数码管。
6. 电阻、电容等元件。
7. 电源。
四、实验步骤1. 硬件连接(1)将步进电机驱动模块的输入端(IN1、IN2、IN3、IN4)分别连接到单片机的P1.0、P1.1、P1.2、P1.3口。
(2)将按键的输入端连接到单片机的P3.0口。
(3)将数码管的段选端连接到单片机的P2口。
(4)将步进电机驱动模块的电源端连接到电源。
(5)将步进电机连接到驱动模块的输出端。
2. 编写程序(1)初始化单片机I/O端口,设置P1口为输出端口,P3.0口为输入端口,P2口为输出端口。
(2)编写按键扫描函数,用于读取按键状态。
(3)编写步进电机控制函数,实现正反转、转速和定位控制。
(4)编写主函数,实现以下功能:a. 初始化数码管显示;b. 读取按键状态;c. 根据按键状态调用步进电机控制函数;d. 更新数码管显示。
3. 调试程序(1)将程序烧写到单片机中;(2)打开电源,观察数码管显示和步进电机运行状态;(3)根据需要调整程序,实现不同的控制效果。
步进电机控制实验指导书
步进电机控制实验1、实验目的:了解步进电机控制的基本原理;掌握控制步进电机转动的编程方法。
2、实验内容:利用P1输出脉冲序列,由7路反相器电路ULN2003A驱动步进电机。
3、实验接线图:4、实验步骤:(1)在Proteus环境下画电路图;(2)使用keil软件编程,生成hex文件;(3)将hex文件下载到单片机;(4)分别操作K1、K2、K3键,观察电机转向和旋转圈数。
5、程序清单:#include <reg52.h>#define uint unsigned int#define uchar unsigned charuchar code FFW[]={x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09 };uchar code REV[]={0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01 };sbit K1 = P3^0;sbit K2 = P3^1;sbit K3 = P3^2;void DelayMS(uint ms){ uchar i;while(ms--){for(i=0;i<120;i++);}} void SETP_MOTOR_FFW(uchar n) {uchar i,j;for(i=0;i<5*n;i++){for(j=0;j<8;j++){if(K3 == 0) break;P1 = FFW[j];DelayMS(25);}}}void SETP_MOTOR_REV(uchar n) {uchar i,j;for(i=0;i<5*n;i++){for(j=0;j<8;j++){if(K3 == 0) break;P1 = REV[j];DelayMS(25);}}}void main(){uchar N = 3;while(1){if(K1 == 0){P0 = 0xfe;SETP_MOTOR_FFW(N);if(K3 == 0) break;}else if(K2 == 0){P0 = 0xfd;SETP_MOTOR_REV(N);if(K3 == 0) break;}else{P0 = 0xfb;P1 = 0x03;}}}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验八步进电机控制
一、实验目的
1、掌握PLC功能指令的用法
2、掌握用PLC控制步进电机的方法
二、实验器材
1. DICE-PLC01型可编程序控制器实验台/箱l台
2. 编程电缆l根
3. 连接导线若干
三、实验内容及步骤
1、步进电机的工作原理
步进电也称为脉冲电机,它可以直接接收来自计算机的数字脉冲,使电机旋转过
相应的角度。
步进电机在要求快速启停,精确定位的场合做为执行部件,得到了广泛采
用。
四相步进电机的工作方式:
*单相四拍工作方式,其电机控制绕组A、B、C、D相的正转通电顺序为:
A→B→C→D→A;反转通电顺序为:A→D→C→B→A。
*四相八拍工作方式,正转的绕组通电顺序为:A→AB→B→BC→C→CD→D→
DA→A;反向的通电顺序为:A→AD→D→DC→C→CB→B→BA→A。
*双四拍工作方式,正转的绕组通电顺序为:AB→BC→CD→DA→AB;反向的通
电顺序为:AB→AD→DC→CB→BA。
步进电机有如下特点:给步进脉冲电机就转,不给步进脉冲电机就不转;步进脉
冲的频率越高,步进电机转得越快;改变各相的通电方式,可以改变电机的运行方式;
改变通电顺序,可以控制电机的正、反转。
2、设计要求
(1)控制模块中的步进电机工作方式为四相八拍,电机的四相线圈分别用A、B、C、D表示,公共端已接地。
当电机正转时,其工作方式如下:A→AB→B→BC→C→CD→D→DA→A。
当电机反转时,其工作方式如下:A→-AD→D→DC→C→CB→B→BA→A。
设计程序,要求能控制步进电机正反转,并能控制它的转速。
(2)设置以下控制按钮:启动、停止按钮;正、反转控制按钮;快速、慢速控制
按钮。
步进电机的脉冲可用逐位移位指令循环移位来实现,其脉冲频率可通过控制逐位
移位指令的移位脉冲来调节,而移位脉冲可用两个定时器组合来完成,要改变脉冲频率,
只要改变定时器设定值即可。
(3)程序运行后,首先选择正、反转按钮,然后选择快、慢速按钮,最后按下“启
动”按钮,电机便会按照按钮的选择控制来工作。
步进电机在工作过程中可实时改变电
机的转速、正反转,也可按下停止按钮结束电机的工作。
3、程序修改和讨论
(1)修改程序,改变步进电机的工作方式,上机调试通过;讨论步进电机的几种
工作方式有何区别?
(2)通过修改程序,改变步进电机工作的脉冲频率,即改变步进电机的转速,并
观察步进电机的工作情况?
(3)仔细阅读源程序,掌握如何控制步进电机的正反转,即改变各相的通电顺序,
在程序中如何实现?
3、确定输入、输出端口、并编写程序
4、编译程序,无误后下载至PLC主机的存储器中,并运行程序。
5、调试程序,直至符合设计要求。
6、参考程序(步进电机控制)及接线表
2。