6-劳斯判据
劳斯判据的证明及应用
劳斯判据的证明及应用劳斯判据(Rayleigh's criterion)是描述两个正交振动的符合条件的充分必要条件。
它由英国物理学家勒克·埃尔斯利·劳斯(Lord Rayleigh)于1879年提出,并被广泛应用于光学、声学、信号处理等领域。
首先,我们来推导劳斯判据的证明。
假设有两列正交的振动,分别用x(t)和y(t)表示,其中t表示时间。
为了方便计算,我们可以将振动表示为复指数形式:x(t) = Re [ Xexp(iωt) ]和y(t) = Re [ Y exp(iωt) ],其中X和Y是复振幅,ω是角频率。
我们定义振动的互强度(cross-intensity)为Ix,y(t) =x(t)y*(t),其中y*表示y的复共轭。
根据定义,我们有:Ix,y(t) = Re [ X exp(iωt) Y* exp(-iωt) ] = Re [ XY* ]为了计算Ix,y(t)的平均值,我们需要对振动周期T进行时间平均:<Ix,y> = (1/T) ∫[0,T] Ix,y(t) dt将Ix,y(t)代入上式,并利用Euler公式(exp(iθ) = cosθ + isinθ)展开,可以得到:<Ix,y> = (1/T) ∫[0,T] Re [ XY* ] dt= (1/T) Re [ X∫[0,T] Y* dt ]= (1/T) Re [ X∫[0,T] Re [ Y* ] dt ]根据劳斯判据的定义,<Ix,y>=0,因此我们有:Re [ X∫[0,T] Re [ Y* ] dt ] = 0由于X是任意复振幅,我们可以独立地选取它的实部和虚部分别为1和0。
这样,上式可以简化为:Re [ ∫[0,T] Re [ Y* ] dt ] = 0我们知道,对于任意实函数f(t),其实部的积分与f(t)的本征函数cos(ωt)正交。
∫[0,T] Re [ Y* ] dt = 0这就是劳斯判据的证明,根据这个证明,我们可以得到劳斯判据的应用。
劳 斯 判 据

图4-1 系统的结构图
1
K
系统的闭环传递函数为
(s)
C(s) R(s)
1
s
(s 1
1)(s K
2)
s3
K 3s2
2s
K
s (s 1)(s 2)
系统的闭环特征方程为
s3 3s2 2s K 0
劳斯判据
1.4 劳斯判据在系统分析中的应用
列出劳斯表为
s3
1
2
s2
3
K
s1 6 K 3
s0
D(s)
n
(s pj )
n1
n2
(s pl ) (s2 2k s k2 )
j 1
l 1
k 1
n1
将式(4-2)展成部分分式形式 C(s)
Al
n2
Bk
l1 s pl k 1 s2 2k s k2
(4-2) (4-3)
式中 Al —— C(s) 在闭环实极点 pl 处的留数;
Bk —— C(s) 在闭环复数极点 s k jk 1 2 处的留数。
方法一:用一个接近于零的很小的正数来代替这个零,并据其计算出劳斯表中的其 余各项。
方法二:用代入原方程,重新列出劳斯表,再用劳斯判据判断系统的稳定性。
劳斯判据
1.3 劳斯判据的特殊情况
【例 4-3】 已知系统的闭环特征方程为
s4 2s3 s2 2s 1 0
试用劳斯判据判断系统的稳定性。
在劳斯表第1列系数中,ε是接近
在零初始条件下,若闭环系统的输入信号 r(t) 在[0,) 上满足 r(t) N ,而在此输入信
号作用下的输出响应 c(t)
g( )r(t
)d
满足
劳斯判据总结范文
劳斯判据总结范文劳斯判据是在国际投资仲裁领域中一个重要的法律原则,它由国际法院在劳斯与墨西哥国之间的投资争端案件中首次提出。
劳斯判据的总结主要包括以下几个方面。
首先,劳斯判据确认了国际投资者享有的合法权益。
根据劳斯判据的规定,国际投资者在国外进行投资时,应当受到合理和公正的对待,其合法权益应当得到充分的保护。
这一原则保证了国际投资者在投资目的国享有合法权益的权利。
其次,劳斯判据强调了国家对外国投资者和其投资的责任。
根据劳斯判据的规定,国家承认其对外国投资者和其投资应当承担责任,不能恶意和歧视地干涉、阻碍投资者的合法权益。
同时,如果国家进行了不公正的行为或违反了国际法,国际投资者有权要求国家给予恢复损害的补偿。
此外,劳斯判据提供了对投资者国家非法行为的界定。
劳斯判据规定,国家如果对投资者和其投资进行了不公正的待遇或剥夺了其合法权益,就可以被认定为非法行为。
劳斯判据还对不公正待遇的具体界定提供了一些指导,例如,国家对投资者进行的歧视行为、违法的法案和政策等都可以被视为非法行为。
还有,劳斯判据确认了国际投资仲裁作为解决投资争端的有效机制。
根据劳斯判据的规定,国际投资者可以向国际仲裁机构提起诉讼,通过仲裁解决投资争端。
这一机制能够确保投资者相对独立、公正和效率的解决争端,对于维护投资者的权益具有重要意义。
最后,劳斯判据提供了一条救济机制,即“审慎投资原则”。
根据该原则,国际投资者在进行投资时应当审慎考虑投资的风险,并遵守目标国的法律和法规。
如果投资者没有尽到审慎义务,其请求补偿的权利可能会受到限制。
总而言之,劳斯判据是国际投资仲裁领域中的一项重要原则,旨在确保国际投资者的合法权益能够得到充分保护,并对非法行为提供了一个界定和救济机制。
这一判据的出现对于促进国际投资活动的发展和维护国际投资者权益具有重要意义。
对劳斯判据的浅略分析
对劳斯判据的浅略分析劳斯判据是一种用于解决材料失效问题的原则与方法。
它最早由英国工程师Peter E. L. Hugoniot在发表于1918年的一篇关于冲击波理论的论文中提出,之后被法国工程师主义者Henri Ludovic Chiendaux在1927年提出了数学表达形式以及严谨的证明。
劳斯判据的核心思想是材料在受到外部载荷作用时,应力和应变之间的关系可以用来评估材料的破坏状态,通过评估材料的破坏状态来确定材料的力学性能。
劳斯判据被广泛应用于材料力学、工程设计以及结构设计等领域,它为工程师提供了一种有效的方法来评估材料的强度和耐久性。
劳斯判据主要是通过应力和应变之间的关系来评估材料的破坏状态,具体来说,劳斯判据是通过比较材料的应力与其应变的比值与一定的临界值来判断材料是否会发生破坏。
如果材料在受到外部载荷作用时,应力与应变之间的比值超过了临界值,那么就表示材料会发生破坏。
劳斯判据的临界值是根据材料的性质和使用条件来确定的,通常来说,材料的强度越高,临界值就会相对越大。
劳斯判据对于材料的破坏状态进行评估的方法简单直观,因此被广泛应用于材料力学和工程设计的领域。
在工程设计中,工程师可以通过劳斯判据来评估材料在受到外部载荷作用时是否会发生破坏,从而选择合适的材料来设计结构。
在材料力学的研究中,劳斯判据也被用来评估材料的强度和耐久性,从而为材料的性能优化提供依据。
劳斯判据也存在一些局限性。
劳斯判据忽略了材料的微观结构对其破坏状态的影响,它只是通过应力和应变之间的关系来评估材料的破坏状态,而没有考虑材料内部的微观结构。
劳斯判据在某些特殊情况下可能会出现失效,例如在材料的非线性变形、非均匀应力分布和多轴应力状态等情况下,劳斯判据可能无法准确地评估材料的破坏状态。
在工程实践中,工程师需要在使用劳斯判据时考虑到这些局限性,综合考虑材料的实际工作条件和使用情况,以确保评估结果的准确性。
劳斯判据-特殊情况
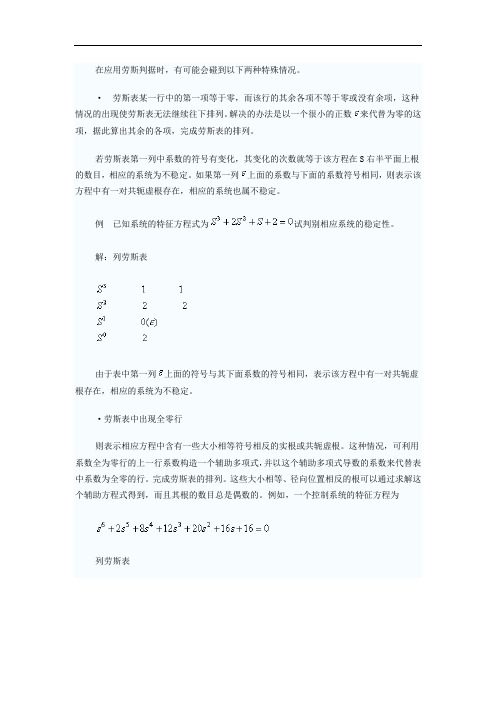
在应用劳斯判据时,有可能会碰到以下两种特殊情况。
·劳斯表某一行中的第一项等于零,而该行的其余各项不等于零或没有余项,这种情况的出现使劳斯表无法继续往下排列。
解决的办法是以一个很小的正数来代替为零的这项,据此算出其余的各项,完成劳斯表的排列。
若劳斯表第一列中系数的符号有变化,其变化的次数就等于该方程在S右半平面上根的数目,相应的系统为不稳定。
如果第一列上面的系数与下面的系数符号相同,则表示该方程中有一对共轭虚根存在,相应的系统也属不稳定。
例已知系统的特征方程式为试判别相应系统的稳定性。
解:列劳斯表
由于表中第一列上面的符号与其下面系数的符号相同,表示该方程中有一对共轭虚根存在,相应的系统为不稳定。
·劳斯表中出现全零行
则表示相应方程中含有一些大小相等符号相反的实根或共轭虚根。
这种情况,可利用系数全为零行的上一行系数构造一个辅助多项式,并以这个辅助多项式导数的系数来代替表中系数为全零的行。
完成劳斯表的排列。
这些大小相等、径向位置相反的根可以通过求解这个辅助方程式得到,而且其根的数目总是偶数的。
例如,一个控制系统的特征方程为
列劳斯表
由于这一行全为0,用上一行组成辅助多项式
由上表可知,第一列的系数均为正值,表明该方程在S右半平面上没有特征根。
令
F(s)=0,
求得两对大小相等、符号相反的根,显然这个系统处于临界稳定状态。
对劳斯判据的浅略分析
对劳斯判据的浅略分析劳斯判据是流体力学中的一个重要概念,用于判断流体在流动过程中是否是层流或湍流状态。
该判据由德国物理学家约翰·瓦塞姆·劳斯在1851年提出,被广泛应用于流体力学的研究中。
劳斯判据的表达式为:Re = ρvl/μ其中Re表示劳斯数,ρ表示流体的密度,v表示流体的速度,l表示流体流动的特征长度,μ表示流体的黏度。
劳斯判据的计算结果可以代表流体流动的状态。
当劳斯数小于一定的阈值时,流体处于层流状态;当劳斯数大于一定的阈值时,流体处于湍流状态。
劳斯数越大,流体的湍流程度越高。
1. 与流体的性质有关:劳斯数的分子包括流体的密度、流速、特征长度等参数,分母为流体的黏度。
由于这些参数直接反映了流体的性质,因此劳斯判据与流体性质密切相关。
2. 对流动稳定性判断:劳斯判据可以用来判断流体流动的稳定性。
当劳斯数小于一定的阈值时,流体呈现出层流状态,流动较为稳定;当劳斯数大于一定阈值时,流体呈现出湍流状态,流动较为不稳定。
这对于一些工程应用非常重要,如管道输送流体、飞机机翼表面流动等。
3. 与流动问题的解析和计算有关:劳斯判据的使用可以简化流体力学问题的解析和计算。
通过计算劳斯数,可以快速判断流体流动的状态,从而决定采用哪种计算或解析方法。
对于层流问题,可以采用一些简化的假设和解析计算方法;而对于湍流问题,需要考虑湍流的复杂性,采用更加复杂的数值模拟和实验方法。
4. 与流体管道流动有关:劳斯判据在研究管道中的流体流动时得到广泛应用。
在工程中,管道输送流体是一种常见的情况,判断流体流动状态对于设计和优化管道系统至关重要。
劳斯判据的使用可以帮助工程师确定流体是否会出现湍流现象,从而选择合适的管道尺寸和流量控制方式。
5. 劳斯判据的局限性:劳斯判据是基于一些假设和近似推导得到的,因此其适用范围是有限的。
特别是在一些复杂的流动情况下,如多相流、非牛顿流体等,劳斯判据可能不能准确判断流动的状态。
对劳斯判据的浅略分析
对劳斯判据的浅略分析劳斯判据是经济学家劳伦斯·劳斯(Laurence J. Laurence)于1972年提出的一种经济指标,用以衡量一个国家的国际支付能力。
这一判据在国际经济领域被广泛运用,具有重要的参考价值。
以下将对劳斯判据进行浅略分析。
劳斯判据是以国际收支平衡为基础的一项指标,它主要通过比较一个国家的国际资产与国际负债的差额来衡量其国际支付能力。
如果一个国家的国际资产大于国际负债,意味着它能够充分支付其对外债务,并且还有余额用于对外投资。
反之,则说明该国的国际支付能力不足,可能会面临债务违约的风险。
劳斯判据的核心思想是“外债不超过可支配收入的限度”,这可以被理解为一个国家的债务应该是可持续的,不应该超过其可支配收入的水平。
如果一个国家的债务超过了其可支配收入的限度,那么它就可能陷入财政危机,甚至债务危机。
劳斯判据的应用有助于评估一个国家的国际支付能力和债务风险。
通过分析一个国家的国际资产和国际负债的比较,可以判断其是否存在债务问题,并进一步预测其未来的还款能力。
这对于国家债务管理和经济决策具有重要的指导意义。
劳斯判据也存在一些局限性。
它忽视了国际收支中一些非债务因素的影响,比如国际贸易和国际资本流动。
这些因素对于一个国家的经济稳定和外汇储备也具有重要的影响,但在劳斯判据中并未考虑。
劳斯判据并不直接考虑一个国家的经济实力和发展潜力。
一个发展中的国家可能在国际支付能力方面不如发达国家,但它的经济实力和潜力可能更高,未来可能会有更好的还款能力。
劳斯判据是一种衡量国际支付能力的重要指标,可以用于评估一个国家的债务风险和还款能力。
它也存在一些局限性,需要综合考虑其他因素来进行全面的分析和判断。
在实际应用中,可以将劳斯判据与其他指标结合起来,以更好地评估一个国家的经济状况。
34-6 劳斯稳定判据
第一列元素变号一次,有一个正根,系统不稳定 第一列元素变号一次,有一个正根,系统不稳定
《自动控制理论》
网址:
应用Routh判据分别研究一阶、 应用Routh判据分别研究一阶、二阶和三阶微分方程 Routh判据分别研究一阶
a0 s + a1 = 0 a0 s + a1s + a2 = 0 3 2 a0 s + a1s + a2 s + a3 = 0
s = z −σ1
把虚轴左移σ 1 。将上式代入系统的特 征方程式,得到z为变量的新特征方程式, 征方程式,得到z为变量的新特征方程式, 然后再检验新特征方程式有几个根位于新 σ 虚轴(垂直线s= 1 s=的右边。 虚轴(垂直线s=- )的右边。如果所有根 均在新虚轴的左边( 均在新虚轴的左边(新劳斯阵列式第一列 均为正数), ),则说系统具有稳定裕量 σ1 均为正数),则说系统具有稳定裕量 。
(1)劳斯(Routh)判据 (1)劳斯(Routh) 劳斯
设系统的特征方程式为
a0 s n + a1s n−1 + a2 s n−2 + L + an−1s + an = 0
将上式中的各项系数, 将上式中的各项系数,按下面的格式排成劳斯表
s s s s s s s
n n−1 n− 2 n−3
a0 a1 b1 c1
《自动控制理论》
网址:
例5: D(s)=s5+ 3s4+ 12s3+20s2+35s+25=0
解:列劳斯表
s5 s4 s3 s2 s1 s0
1 3
16 3
12 20
35 25
5 0 10 25
6阶多项式劳斯–赫尔维茨判据
6阶多项式劳斯–赫尔维茨判据英文版6th Degree Polynomial Routh-Hurwitz CriterionIn the field of control theory, stability analysis is crucial for determining the behavior of dynamic systems. The Routh-Hurwitz criterion is a mathematical tool used to assess the stability of linear time-invariant systems. Specifically, it helps determine whether the roots of a system's characteristic equation—which govern its dynamic response—lie in the left half of the complex plane, indicating stability.For polynomial equations of lower degrees, the application of the Routh-Hurwitz criterion is relatively straightforward. However, as the degree of the polynomial increases, the complexity and computational requirements also increase. This article focuses on the application of the Routh-Hurwitz criterion to 6th-degree polynomials, which represent a significant challenge in control system design.The Routh-Hurwitz criterion involves constructing a tabular array known as the Routh array. This array is constructed by arranging the coefficients of the characteristic polynomial in a specific manner. The criterion states that if all the elements in the first column of the Routh array are positive, then the system is stable.For 6th-degree polynomials, the construction of the Routh array becomes more complex. The array now has six rows, with each row representing a specific coefficient of the polynomial. The elements of the array are obtained by calculating ratios and differences of the coefficients.Once the Routh array is constructed, it can be used to determine the stability of the system. If all the elements in the first column are positive, the system is stable. If any element is zero or negative, the system's stability cannot be determined solely based on the Routh-Hurwitz criterion. In such cases, further analysis, such as examining the signs of the remainingelements in the array or performing a root locus analysis, may be necessary.The application of the Routh-Hurwitz criterion to 6th-degree polynomials is crucial in control system design, especially when dealing with complex systems that exhibit higher-order dynamics. By carefully constructing the Routh array and analyzing its elements, engineers can gain valuable insights into the stability of these systems and make informed decisions about their design and operation.中文版6阶多项式劳斯–赫尔维茨判据在控制理论领域,稳定性分析对于确定动态系统的行为至关重要。
劳斯判据.ppt
a0 a2 a4
a6
b1
a1a2 a0a3 a1
a1 a3 a5 b1 b2 b3
a7
b2
a1a4 a0a5 a1
c1 c2 c3
b3
a1a6 a0a7 a1
一直计算到最后一行算完 为止。然后判断阵列中第一列 系数的符号,若全部>0,则系统
c1
b1a3 a1b2 b1
s1 s0
稳定;否则,第一列系数符号 改变的次数,就为特征方程在 右半s平面的根数。
3.2.2 系统稳定的充要条件
xi t
nt
xo t
t
t=0 t
Xi s
-
N s
+
G1 s
G2 s
xo 0
t
xoi 0
X o s
X i s
-
N s
+
G1 s
G2 s
X o s
Xo s N s
G2 s 1 G1 sG2 s
b0 sm a0 s n
b1sm1 a1sn1
bm1s bm an1s an
表明在 S 平面内存在两个大小相等、符 号相反的实根或一对共轭虚根
[S] 显然,这些根的 数目一定是偶数。
由该行的上一行元素来解决: (1)构成辅助多项式,并求导,用其系数 代替全为零的行; (2)可以利用辅助方程,解出这些特征根。
例:Ds s6 2s5 8s4 12s3 20s2 16s 16 0
e jt E j cos jt Fj sin jt
i 1
j k 1
若系统稳定,则 xo t |t 0
〈i 0, j 0 系统稳定的充要条件
i, j 对应闭环传递函数
特征根的实部
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s6 1 3
劳
s5 2 s4 11
44 22
5 6 77
7
((61-1(064-)-/614=))//-228==1 2 劳斯表特点
斯 s3 0ε --88
表 s2 2+8/ε 7
s1 -8 -7ε/( 2+8/ε )
1 右移一位降两阶
2 每两行个数相等,否则补0。 3 行列式第一列不动 4 次对角线减主对角线
t
t 4
sin(mt)
1
2m
sin(mt)
当系统在虚轴上只有简单极点 (含N=1) ,而 其他极点都在左半平面内时,系统将是临界稳定的。
此时,系统对特定的输入会出现无界输出,而 对大部分有界输入产生的是有界响应。例如,存在简 单虚轴极点时,系统对有界输入的响应是有界持续振 荡,但当输入为有界正弦信号且频率正好为虚根幅值 时,输出却是无界的。
一、基本概念
右图是塔科马峡谷 的首座大桥,开 通于1940年7月 1日。只要有风, 这座大桥就会晃 动。
4 个月之后,一 阵风吹过,引起 桥的晃动,而且 越来越大,直到 …….
同理,不要在桥上齐步走!
例3.1 麦克风和扬声器
语音 信号
麦克风
增大功率
扬声器
回音 信号
空气 媒介
减小距离
功放 信号
尖叫
一次方程: a1s a0 0
a1,a0同号,则系统稳定。
二次方程: a2s2 a1s a0 0
a1,a2,a0同号,则系统稳定。
三次方程: a3s3 a2s2 a1s a0 0
a0,a1,a2,a3均大于0,且a1a2>a3a0,则系统稳定。
情况一、首列均不为0; 情况二、首列出现0,但该行不全为0; 情况三、首列出现0,且该行全为0; 情况四、虚轴上有重根。 其中,情况一是重点。
用公式解释,留做练习!
归纳而言, LTIC系统绝对稳定的充要条件是
闭环系统所有的极点为负值或有负的实 部,或者说,闭环系统所有的极点都位于s平 面的左半平面。
i
k(t) ci
0
0
ci
t
0
i
ci
t0
t
稳定
临界稳定
发散
实根情况下系统的稳定性
j
j
j
0 k(t)
0
t0
t
0
t
衰减振荡-稳定 等幅振荡-临界稳定 发散振荡-不稳定
(3)系统不稳定的充分条件:劳思表第一列若出现小于0 的元素,则系统不稳定。且第一列元素符号改变的次数等 于系统正实部根的个数。
设特征方程为
a5s5 a4s 4 a3s3 a2 s 2 a1s a0 0 则Routh表为
s5
a5
a3
a1
s4
a
4
a2
a0
s3
a4a3 a5a2 a4
b1
共轭复根情况下系统的稳定性
注意: 由于模型的近似化,且系统的参数又处在不断 的微小变化中,所以,临界稳定实际上也应视为不稳定。
3-2 劳思稳定性判据
[判据] (1) 系统稳定的必要条件:特征方程中所有项的系数均大 于 0 (同号);只要有1项等于或小于 0 ,则为不稳定系 统。
(2)系统稳定的充分条件:劳思表第一列元素均大于0 (同号) 。
a4a1 a5a0 a4
b2
0
s2
b1a2 a4b2 b1
c1
a0
s1
c1b2 b1a0 c1
d1
0
s0
a0
例3.2 s 4 2s3 3s2 4s 5 0 s4 1 3 5 s3 2 4 s2 1 5 s1 6 0 s0 5
则系统不稳定,且有两个正实部根。(即有2 个根在S的右半平面。)
平面。
如果系统在右半平面至少有一个极点,(某个 am 或 j 取负值), 或在虚轴上有重根,系统对任何输
入的响应都会是无界的。
例如,如果虚轴根 j 是二重根,对应的部
分分式分解应该为:
2
1 1
1 1
s2 2
2
4 s
j 2
s
j2 2
s2 2
而对应的系统脉冲响应为无界输出:
ypart
例3.1 麦克风和扬声器
R(s)
Y(s)
K
B(s) k
G(s)=K/(1-K*k) 拾音器正反馈
(a) K=5,k=0.1 1→10 1.5 →15 2 →20…
(b) K=5, k=0.2 1→∞
(c) K=10, k=0.1 1→∞
系统稳定性 (输入输出稳定性): 对任何有界输入产生有界输出的系统
成为稳定系统。
这种性质保证了系统的绝对稳定性。
对稳定系统而言,在稳定的前提下,还 可以讨论系统的相对稳定性。 民航客机就比战斗机更加稳定。
[理解]
绝对稳定
临界稳定
不稳定
2. 系统稳定的充要条件
闭环传递函数的一般形式为:
l
Ks zi
Gs Q
i 1 R
sN s j
s2 2ams (am2 m2 )
第三章 控制系统的时域稳定性
3-1 稳定性的基本概念 3-2 Routh—Hurwitz稳定性判据 3-3 Routh—Hurwitz稳定性判据
的应用
第六讲:控制系统时域稳定性
3-1 稳定性的基本概念 3-2 Routh—Hurwitz稳定性判据 3-3 Routh判据的应用
3-1 基本概念与结论
劳斯表情况一 例3.3、含参变量的例子:设系统特征方程为:
s3+s2+s+K=0; K不等于1或0
劳 s3 1 1
s2 1 K
斯 s1 1-K 0 表 s0 K
参数取值影响稳定性!
于是: K小于0,系统不稳定;
K大于1,系统不稳定;
K大于0且小于1时,系 统稳定。
例3.4 设系统特征方程为: 劳斯表情况二 s6+2s5+3s4+4s3+5s2+6s+7=0
s0 7
5 分母总是上一行第一个元素
8 再令正无穷小量ε趋近于6 一行可同乘或同除某正数
0,得到真正的劳斯表如下。7 第一列出现零元素时,
用正无穷小量ε代替。
系统稳定的必要条件: 特征方程各项系数 均大于零! 同号! 有正有负一定不稳定! 缺项一定不稳定!
-s2-5s-6=0稳定吗?
系统稳定的充分条件:
j 1
m1
其中,系统的非零极点为: pj j 和 pm, pm am jm
当 N=0时, 系统脉冲响应的一般表达式为:
y
t
Q j 1
Aje jt
R m1
Bm
(1
m
)eamt
sin(mt
m
)
其中,Aj Bm 是依赖于系统参数的常值系数。
当
和
j
am取正值时,对任何有界输入, y(t)
都是有界的。此时,所有闭环极点都在s平面的左半
s6 1 3 s5 2 4 s4 1 2 s3 0 -8
s2 +∞ 7 s1 -8
s0 7
57 6 7
劳斯表第一列元素不变号!