无刷直流电机工作原理及PWM调速
无刷直流电机的调速与控制技术

无刷直流电机的调速与控制技术随着科技的发展,电动机在各个领域的应用越来越广泛。
而无刷直流电机作为一种高效、可靠的电机,在许多领域得到了广泛的应用。
无刷直流电机的调速与控制技术是保证电机运行稳定性和提高其性能的重要一环。
一、无刷直流电机的工作原理无刷直流电机是一种基于电磁感应原理工作的电动机。
其核心部件是电机转子上的永磁体,通过感应电流产生的磁场与定子线圈产生的磁场相互作用,从而实现电机的运转。
相比于传统的有刷直流电机,无刷直流电机省去了电刷与换向器件,因此具有更高的效率和更长的寿命。
二、无刷直流电机的调速方法无刷直流电机的调速方法主要包括电压控制调速和电流控制调速两种。
1. 电压控制调速电压控制调速是通过改变电压的大小来控制电机的转速。
在实际应用中,最常见的方式是采用PWM (Pulse Width Modulation) 调制技术。
PWM技术通过调整电压的占空比,使得电机在一个固定的周期内以不同的占空比工作,从而实现不同的转速。
这种方法简单易行,但是对于大功率的无刷直流电机,其调速范围较窄。
2. 电流控制调速电流控制调速是通过改变电机定子线圈的电流来控制电机的转速。
常见的控制方法有开环控制和闭环控制。
开环电流控制是在电机定子线圈中加回馈电阻,通过改变反馈电阻的大小来调整电流。
这种方法结构简单,控制参数易调,但是系统稳定性较差,无法适应负载的变化。
闭环电流控制是在开环控制的基础上加入反馈环节,通过传感器测量电机的电流,并与设定的电流进行比较,通过PID控制算法来调整控制器输出的电压,从而控制电机的转速。
这种方法可以提高系统的稳定性和动态响应性能,适用于对转速精度和系统稳定性要求较高的应用。
三、无刷直流电机的控制技术无刷直流电机的控制技术是实现电机调速的重要手段之一。
根据不同的应用场景和需求,可以选择不同的控制方法。
1. 速度控制速度控制是无刷直流电机最基本的控制方式。
通过改变电机的输入提速,可以控制电机的转速。
直流电动机的PWM调压调速原理

直流电动机的PWM调压调速原理
直流电动机的PWM调压调速是指通过调节脉宽调制(PWM)信号的占空比,控制直流电动机的电压和转速。
其原理是利用数字信号的高低电平与时间的对应关系,通过高电平和低电平的时间比例来控制脉冲信号的平均值,从而实现对电动机的调压和调速。
具体来说,PWM调压调速主要包括以下几个步骤:
1.信号发生器:使用微控制器或其他信号发生器产生一个固定频率的方波信号,通常频率为几千赫兹到几十千赫兹。
这个信号称为PWM基准信号。
2.调制器:通过控制占空比,将PWM基准信号转换为调制后的PWM信号。
占空比是指高电平持续的时间与一个周期的比值。
例如,占空比为50%的PWM信号表示高电平和低电平持续时间相等。
调制器可以是硬件电路或者软件控制的。
3.电压调节:将调制后的PWM信号经过滤波器平滑输出,形成电压调节信号。
滤波器通常使用低通滤波器,将PWM信号的高频成分滤除,得到平均电压。
4.转速控制:通过调节占空比,改变PWM信号的高电平时间,从而改变直流电动机的平均电压。
占空比越大,输出电压就越高;占空比越小,输出电压就越低。
5.转速反馈:为了实现闭环控制,通常需要通过传感器获取直流电动机的转速,并将转速信息反馈给调速控制器。
调速控制器会根据反馈信号与设定的转速进行比较,调节占空比控制电动机的转速。
总结起来,PWM调压调速原理就是通过调节PWM信号的占空比控制直流电动机的电压和转速。
通过改变占空比,可以改变PWM信号的高电平时间,从而改变电动机的平均电压和转速。
同时,结合转速反馈,可以实现封闭环控制,使电动机的转速能够与设定值保持一致。
无刷直流电机的调速范围

无刷直流电机的调速范围1. 引言无刷直流电机(Brushless DC Motor)是一种高效、可靠、低噪音的电机,广泛应用于工业自动化、电动车辆、无人机等领域。
调速范围是指电机在不同负载条件下能够稳定运行的速度范围。
本文将介绍无刷直流电机的调速原理、调速方式以及调速范围的影响因素。
2. 无刷直流电机的调速原理无刷直流电机由永磁转子和绕组驱动器组成,其调速原理是通过改变绕组驱动器的电压和电流来控制电机的转速。
传统的直流电机是通过换向器实现转速调节,而无刷直流电机则采用了电子换向器(也称为电调)来实现转速调节。
电调通过检测电机转子位置,控制绕组驱动器的相序,从而实现电机的正常运行。
3. 无刷直流电机的调速方式无刷直流电机的调速方式有多种,常见的包括电压调速、PWM调速和闭环调速。
3.1 电压调速电压调速是最简单的调速方式,通过改变绕组驱动器的电压来改变电机的转速。
当电压增加时,电机转速也会增加;当电压减小时,电机转速也会减小。
电压调速适用于负载变化较小的场景,但对于负载变化较大的情况下,电压调速的效果较差。
3.2 PWM调速PWM调速是通过改变绕组驱动器的工作周期来改变电机的转速。
PWM调速的原理是将直流电压转换为脉冲信号,通过改变脉冲信号的占空比来改变电机的平均电压。
当占空比增加时,电机转速也会增加;当占空比减小时,电机转速也会减小。
PWM 调速可以实现较高的转速精度和稳定性。
3.3 闭环调速闭环调速是通过反馈控制来实现电机转速的精确控制。
闭环调速系统包括速度传感器、控制器和绕组驱动器。
速度传感器用于检测电机转速,将转速信号反馈给控制器,控制器根据转速信号调整绕组驱动器的输出,从而实现电机转速的精确控制。
闭环调速可以实现较高的转速精度和稳定性,但成本较高。
4. 无刷直流电机的调速范围影响因素无刷直流电机的调速范围受多种因素影响,包括电机设计参数、电压供应、负载特性等。
4.1 电机设计参数电机设计参数是影响调速范围的重要因素之一。
直流电机PWM调速基本原理
直流电机PWM调速基本原理
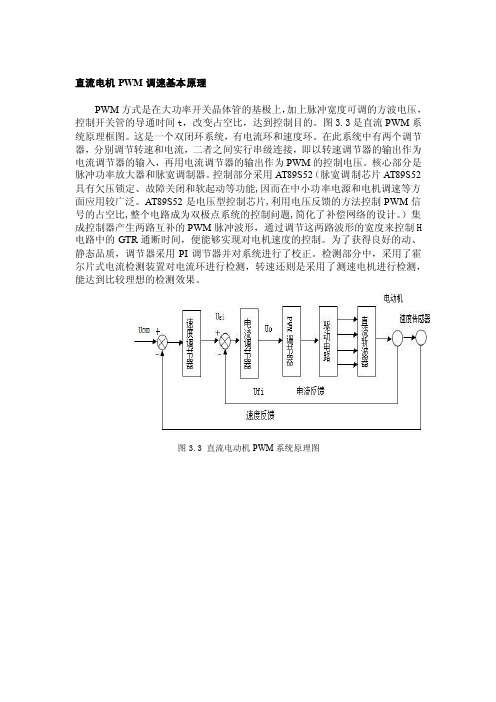
PWM方式是在大功率开关晶体管的基极上,加上脉冲宽度可调的方波电压,控制开关管的导通时间t,改变占空比,达到控制目的。
图3.3是直流PWM系统原理框图。
这是一个双闭环系统,有电流环和速度环。
在此系统中有两个调节器,分别调节转速和电流,二者之间实行串级连接,即以转速调节器的输出作为电流调节器的输入,再用电流调节器的输出作为PWM的控制电压。
核心部分是脉冲功率放大器和脉宽调制器。
控制部分采用AT89S52(脉宽调制芯片AT89S52具有欠压锁定、故障关闭和软起动等功能,因而在中小功率电源和电机调速等方面应用较广泛。
AT89S52是电压型控制芯片,利用电压反馈的方法控制PWM信号的占空比,整个电路成为双极点系统的控制问题,简化了补偿网络的设计。
)集成控制器产生两路互补的PWM脉冲波形,通过调节这两路波形的宽度来控制H 电路中的GTR通断时间,便能够实现对电机速度的控制。
为了获得良好的动、静态品质,调节器采用PI调节器并对系统进行了校正。
检测部分中,采用了霍尔片式电流检测装置对电流环进行检测,转速还则是采用了测速电机进行检测,能达到比较理想的检测效果。
图3.3 直流电动机PWM系统原理图。
直流电机pwm调速原理
直流电机pwm调速原理直流电机PWM调速原理是通过改变电源给电机的电压和电流,从而控制电机转速的一种方法。
PWM,即脉冲宽度调制,是一种用来调节电平电路中电平的技术,利用脉冲信号的占空比(高电平与周期时间之比)来控制电平的平均值。
在直流电机PWM调速中,首先需要了解电机的电刷子与换向器的工作原理。
电刷子负责切换电极的极性,而换向器则根据电刷子的位置将电流传送到正确的电极上。
当电流在电机的绕组中流动时,会形成磁场,这个磁场会与永磁体产生相互作用,从而产生电机的转动力。
为了控制电机的转速,可以通过改变供电电压的幅值和频率来实现。
在PWM调速中,电源输出的电压信号被分解为一系列的脉冲信号。
脉冲信号的占空比根据所需的电机转速来确定,占空比越大,电机转速越快。
在每个脉冲周期中,脉冲信号的高电平部分代表电源给电机供电的时间,而低电平部分则代表停止供电的时间。
通过改变脉冲信号的占空比,可以控制电机的平均电压和平均电流。
当占空比增大时,电机平均得到更多的能量供应,转速也会相应增加。
反之,当占空比减小时,电机平均得到更少的能量供应,转速会减慢。
这样,通过不断调整脉冲信号的占空比,就可以实现对直流电机的精准调速。
需要注意的是,在PWM调速中,电机的换向也需要考虑进去。
换向器需要根据电机的转向来控制电刷子的位置,使电流能够按正确的路径流动。
这样能够保证电机的正常运转,并提供足够的转矩和稳定性。
综上所述,直流电机PWM调速是通过改变电源给电机的电压和电流的脉冲信号的占空比来实现的。
通过调节脉冲信号的占空比,可以控制电机的平均电压和电流,从而实现对电机转速的精确控制。
同时,需考虑电机的换向,以保证电机能够正常运转。
无刷直流电机的工作原理

无刷电机相信大家没听说过,生活或工作中都用过或接触过,今天分享一篇从基础开始描述无刷电机的文章。
0.电动机转动的原理先说电动机的基本原理吧。
有基础的可以直接跳过。
大家小时候都玩过磁铁吧,异极相吸,两磁铁一靠近“啪”就撞上了。
现在假设你的手速足够快,拿着一块磁铁在前面疯狂勾引,那么另外一块磁铁就一直跟着你。
你的手拿着磁铁画圈圈,另外一块磁铁也跟着你转圈圈。
以上,就是电动机转动的基本原理了。
只不过是在前面用来勾引的“磁铁”不是真的磁铁,而是由线圈通电后生成的磁场。
1. 无刷直流电机简介无刷直流电机,英语缩写为BLDC(Brushless Direct Current Motor)。
电机的定子(不动的部分)是线圈,或者叫绕组。
转子(转动的部分)是永磁体,就是磁铁。
根据转子的位置,利用单片机来控制每个线圈的通电,使线圈产生的磁场变化,从而不断在前面勾引转子让转子转动,这就是无刷直流电机的转动原理。
下面深入一下。
2. 无刷直流电机的基本工作原理2.1. 无刷直流电机的结构首先先从最基本的线圈说起。
如下图。
可以将线圈理解成长得像弹簧一样的东西。
根据初中学过的右手螺旋法则可知,当电流从该线圈的上到下流过的时候,线圈上面的极性为N,下面的极性为S。
现在再弄一根这样的线圈。
然后摆弄一下位置。
这样如果电流通过的话,就能像有两个电磁铁一样。
再弄一根,就可以构成电机的三相绕组。
再加上永磁体做成的转子,就是一个无刷直流电动机了。
2.2. 无刷直流电机的电流换向电路无刷直流电机之所以既只用直流电,又不用电刷,是因为外部有个电路来专门控制它各线圈的通电。
这个电流换向电路最主要的部件是FET(场效应晶体管,Field-Effect Transitor)。
可以把FET看作是开关。
下图将FET标为AT(A相Top),AB(A相Bottom),BT,BB,CT,CB。
FET 的“开合”是由单片机控制的。
2.3. 无刷直流电机的电流换向过程FET的“开合”时机是由单片机控制的。
无刷直流电机pwm调速原理
无刷直流电机pwm调速原理:从实现到优化无刷直流电机(BLDC)已经成为现代工业中最受欢迎的驱动电机类型之一,其中最常见的控制方式之一是使用脉冲宽度调制(PWM)来实现电机转速控制。
本文将介绍BLDC PWM调速的原理,探讨其应用和优化方法。
1.BLDC PWM调速原理
BLDC电机通过能够确定电机行驶方向和旋转计数器的位置,由调速器交替地开启电机的三个相位,以控制BLDC转动速度。
使用PWM调速的方法是在电机引脚间交替应用高电平和地电平的脉冲,以实现BLDC的转速调整。
具体来说,PWM控制器会在转子旋转时通过电感检测组合三相MOSFET晶体管进行电流控制,来达到恒速的转速调整目的。
2.BLDC PWM调速应用
BLDC PWM调速广泛应用于电动工具、电动车、无人机、机器人等设备中。
在实际应用中,我们需要根据实际需求进行相应的电机转速匹配,以保证电机最大负载工作状态下的能效。
此外,为了避免电机由于承受过大负载而损坏,我们还需要通过PWM调速来限制电机最大负荷。
3.BLDC PWM调速优化
BLDC PWM调速优化方法包括提高PWM更新频率、增加开短路时间、使用低电流逆变器等。
提高PWM更新频率可以增加电机速度和位置反馈的精度,提高控制精度和稳定性;增加开短路时间可以防止电机发生过载时被动烧毁。
但是这也会增加功率损耗,因此需要根据实际需求进行权衡。
使用低电流逆变器会降低电机的当前需求,从而增加开短路时间,提高系统效率。
总之,在BLDC PWM调速中,我们需要根据实际的需求选择适当的电机转速,以增加设备的性能和效率;同时,我们也需要注意调节PWM 控制器的参数,从而达到最大的能效和系统稳定性。
直流无刷电动机及其调速控制
直流无刷电动机及其调速控制1.直流无刷电动机的发展概况与应用有刷直流电动机从19世纪40年代出现以来,以其优良的转矩控制特性,在相当长的一段时间内一直在运动控制领域占据主导地位。
但是,有机械接触电刷-换向器一直是电流电机的一个致命弱点,它降低了系统的可靠性,限制了其在很多场合中的使用。
为了取代有刷直流电动机的机械换向装置,人们进行了长期的探索。
早在1917年,Bolgior就提出了用整流管代替有刷直流电动机的机械电刷,从而诞生了无刷直流电机的基本思想。
1955年美国的等首次申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,标志着现代无刷直流电动机的诞生。
无刷直流电动机的发展在很大程度上取决于电力电子技术的进步,在无刷直流电动机发展的早期,由于当时大功率开关器件仅处于初级发展阶段,可靠性差,价格昂贵,加上永磁材料和驱动控制技术水平的制约,使得无刷直流电动机自发明以后的一个相当长的时间内,性能都不理想,只能停留在实验室阶段,无法推广使用。
1970年以后,随着电力半导体工业的飞速发展,许多新型的全控型半导体功率器件(如GTR、MOSFET、IGBT等)相继问世,加之高磁能积永磁材料(如SmCo、NsFeB)陆续出现,这些均为无刷直流电动机广泛应用奠定了坚实的基础。
在1978年汉诺威贸易博览会上,前联邦德国的MANNESMANN公司正式推出了 MAC无刷直流电动机及其驱动器,引起了世界各国的关注,随即在国际上掀起了研制和生产无刷直流系统的热潮,这业标志着无刷直流电动机走向实用阶段。
随着现代永磁材料和相关电子元器件的性能不断提高,价格不断下降,无刷电动机的到了快速发展,并被广泛应用于各个领域,例如,在数控机床、工业机器人以及医疗器械、仪器仪表、化工、轻纺机械和家用电器等小功率场合,计算机的硬盘驱动和软盘驱动器器中的主轴电动机、录像机中的伺服电动机等。
2.直流无刷电动机的基本结构和工作原理直流无刷电动机的结构直流无刷电动机的结构示意图如图2-1所示。
基于pwm技术的无刷直流电机的调速系统设计大学论文
基于PWM技术的无刷直流电机的调速系统设计Brushless DC Motor Speed Control System Based On PWM摘要无刷直流电机(BLDCM)具有调速性能优异、运行性能可靠和维护方便等优点,相较于有刷直流电机,其采用电子换向取代机械换向,有效地提高了电动机的运行效率,也使得其成品体积更加的轻巧。
但是无刷直流电机也存在转矩脉动、控制器复杂、成本较高等缺陷,这些缺陷的存在也一定程度上影响了无刷直流电机作为高效、先进电机在应用上的普及,因此研究如何改善以及解决无刷直流电机存在的问题便具有更加明显的现实意义。
MATLAB是一款用于数据分析与计算、算法开发以及动态系统建立与仿真的数学软件。
最初是由美国MathWorks公司出品的商用数学软件,其由Matlab和Simulink 两个重要组成部分构成,现在更是应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
本文通过对无刷直流电机结构以及工作原理的研究与分析,找出导致其具有较大转矩脉动的原因,并先从理论上得到如何抑制转矩脉动的方法,再通过Matlab 建立起无刷直流电机的仿真模型,对其仿真结果进行分析与改善,从而有效地抑制无刷直流电机的转矩脉动。
关键词:无刷直流电机,转矩脉动,仿真模型AbstractBrushless DC motor (BLDCM) has excellent speed performance, reliable performance and easy maintenance, etc., compared to a brush DC motor, which uses electronically commutated replace mechanical commutation, effectively improve the operating efficiency of the motor, but also so that the volume of the finished product more compact. But there brushless DC motor torque ripple controller complexity, high cost and other defects, the presence of these defects also affected to some extent, a brushless DC motor as efficient and advanced motor universal in application, how to improve and therefore research solve the problems of the brushless DC motor will have more obvious practical significance.MATLAB is a tool for data analysis and computation, algorithm development, and simulation of dynamic systems to establish and mathematical software. MathWorks was originally developed by the US company produced commercial mathematical software, which consists of Matlab and Simulink are two important parts, and now it is used in engineering calculations, control design, signal processing and communications, image processing, signal detection, financial modeling design and analysis and other fields.Based on the brushless DC motor structure and working principle of research and analysis to identify the cause of which has a large torque ripple, and theoretically first get how to suppress torque ripples, established through Matlab brushless Simulation Model DC motor, its simulation results are analyzed and improved in order to effectively suppress the torque ripple of the brushless DC motorKeywords:Brushless DC motor; The torque pulsation; The simulation model目录第一章绪论 (6)1.1 研究背景及研究意义 (6)1.2 无刷直流电机调速系统的国内外研究现状 (7)1.3 本文的主要研究内容及章节安排 (8)第二章无刷直流电机的基本原理 (9)2.1 无刷直流电机的基本结构 (9)2.1.1 电机本体 (9)1.电动机定子 (9)2. 电动机转子 (10)2.1.2 位置传感器 (10)2.2 无刷直流电机的工作原理及换相过程 (12)2.2.1 无刷直流电机的工作原理 (13)2.2.2 无刷直流电机的换相过程 (15)2.3 无刷直流电机的应用 (16)2.4 本章小结 (16)第三章基于PWM技术的无刷直流电机转矩脉动抑制 (17)3.1 PWM控制技术简介 (17)3.1.1 PWM控制技术的基本原理 (17)3.1.2 PWM控制技术的控制方法 (18)3.2 Buck变换器的原理及控制方式 (19)3.2.1 Buck变换器的原理 (19)3.2.2 Buck变换器的控制方式 (20)3.3 无刷直流电机转矩脉动的产生 (20)3.3.1传导区转矩脉动 (21)3.3.2换相区转矩脉动 (22)3.4 无刷直流电机转矩脉动的抑制 (24)3.5 本章小结 (27)第四章无刷直流电机的仿真分析 (28)4.1 MATLAB和SIMULINK的介绍 (28)4.2 无刷直流电机的数学模型 (29)4.2.1电机本体模块 (30)4.2.2转矩计算模块 (31)4.2.3速度控制模块 (32)4.2.4电流控制模块 (32)4.2.5电压逆变模块 (33)4.3无刷直流电机的仿真结果 (33)4.4本章小结 (38)结论 (39)致谢 (40)参考文献 (41)附录 (42)第一章绪论1.1 研究背景及研究意义对于工厂生产和社会发展而言,电力拖动都有着举足轻重的地位,为了满足生产工艺的需求,通过控制电机的转矩以及转速来控制电动机的转速以及位置,这样就可以形成一个自动化系统,称之为电力拖动。
基于PWM的直流无刷电机控制系统
基于PWM的直流无刷电机控制系统一、本文概述随着科技的快速发展和电机控制技术的不断进步,直流无刷电机(BLDC,Brushless Direct Current Motor)在各个领域的应用越来越广泛。
它们具有高效、低噪音、长寿命等优点,尤其在航空、汽车、家用电器、电动工具以及机器人等领域得到了广泛应用。
而基于脉冲宽度调制(PWM,Pulse Width Modulation)的直流无刷电机控制系统,以其灵活的控制方式、精确的速度调节和优秀的动态响应特性,成为现代电机控制领域的重要研究方向。
本文将对基于PWM的直流无刷电机控制系统进行深入研究。
我们将简要介绍PWM技术的基本原理及其在电机控制中的应用。
接着,我们将重点探讨基于PWM的直流无刷电机控制系统的构成、工作原理以及主要控制策略。
文章还将分析该控制系统的性能特点,包括调速范围、动态响应、稳定性等。
我们将展望基于PWM的直流无刷电机控制系统的未来发展趋势和应用前景。
通过本文的研究,我们期望能够为读者提供一个全面、深入的了解基于PWM的直流无刷电机控制系统的机会,同时为相关领域的工程师和研究者提供有益的参考和启示。
二、直流无刷电机的基本原理直流无刷电机(Brushless Direct Current Motor,简称BLDCM)是一种通过电子换向器替代传统机械换向器的直流电机。
其基本原理主要基于电磁感应和电子换向技术。
电磁感应:直流无刷电机内部通常包含定子(stator)和转子(rotor)两部分。
定子通常由多个电磁铁组成,而转子则带有永磁体。
当定子上的电磁铁通电时,会产生磁场,与转子上的永磁体相互作用,从而驱动转子旋转。
这就是电磁感应的基本原理。
电子换向:与传统的直流电机使用机械换向器不同,直流无刷电机使用电子换向器。
电子换向器通常由微处理器和功率电子开关(如MOSFET或IGBT)组成。
微处理器根据电机的运行状态和位置传感器(如霍尔传感器)的反馈信号,控制功率电子开关的通断,从而实现电磁铁的电流方向的改变。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无刷直流电机的PWM调速
ON-PWM 模式调制方法示意图
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
无刷直流电机的PWM调速
PWM-ON-PWM 模式调制方法示意图
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
无刷直流电机的PWM调速
通过调整PWM的占空比,调节加在电机绕组上的 电压的大小,可以实现像直流电机一样调速性能。
Wb。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
(2)磁通密度(B)
单位面积(S)上垂直通过的磁通量(Φ)叫做磁 通密度(B),B=Φ/S。 1T=1Wb/m2,1G=1Mx/cm2,1T=10000G
磁通密度(B)用特斯拉计(高斯计)测量。
华北电力大学 电机教研室
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
开通A管和Z管
ωt = 240°
电源U+ →V1→A+→C→V2→电源U-; (V1,V2,FAC-)
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
开通B管和Z管
ωt =300°
电源U+ →V3→B+→C→V2→电源U-; (V2,V3,FBC-)
故 1000Oe=1kOe≈1000×80A/m=80kA/m。
《电机学》
华北电力大学 电机教研室
§25-1永磁材料及其特性参数
永磁材料的特性参数
(5)矫顽力(Hc)、Hcb 与Hci 的区别 永磁体经有效充磁后显示出磁性,磁通量从N 极 出来,回到S 极。在反向磁场(退磁场)的作用下永磁 体顽强地保持该磁性,直到在某一大小的反向磁场下
(7)居里温度(Tc) 每种永磁材料都有自己的居里温度。居里温度以 下,材料具有强磁性;在该温度以上,强磁性消失。 永磁体才制造出来时,是磁中性的,经过充磁,强磁
性才显示出来。经有效充磁的永磁体,只有经过热退
磁才能回到磁中性状态。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
(3)剩磁(Br 或Mr) 剩磁是简称,全称是“剩余磁感应强度”(Br)
。将永磁体放在电磁铁两极头之间夹紧,通过磁滞回 线测试仪测出退磁曲线,便得到该永磁体的剩磁,它
的单位与磁通密度相同。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
第二十五章
主要内容:
无刷直流电机
1、永磁材料及其特性参数 2、无刷直流电机及其工作原理 3、无刷直流电机的PWM调速
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
1、永磁材料
铁磁材料磁化特性曲线
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
1、永磁材料
永磁材料的去磁(退磁)曲线
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
(6)最大磁能积(BH)max
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
(6)最大磁能积(BH)max 最大磁能积单位分别是千焦耳/立方米(kJ/m3)和 兆高奥(MGOe)。 这两个单位之间的换算因子是100/4π=7.96。
直 流 电 源
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
开通B管和X管
ωt = 0°
电源U+ →V3→B+→A→V4→电源U-; (V3,V4, FBA-)
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
开通C管和X管
ωt = 60°
电源U+ →V5→C+→A→V4→电源U-; (V4,V5,FCA-)
永磁材料的去磁曲线表示永
磁材料被完全磁化后无外励
磁时的 B—H关系。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料分类 常用的永磁材料有铝镍钴(AlniCo)、钡铁氧体 (Ba-Ferrite)和锶铁氧体(Sr-Ferrite)、钐钴 (SmCo 2∶17 型和SmCo 1∶5 型)和钕铁硼 (NdFeB),这是按发明的先后顺序排列的; 若按年产吨位排列则为:铁氧体、钕铁硼、铝镍 钴、钐钴;若按销售额排列则为:铁氧体和钕铁 硼并列第一,然后是钐钴、铝镍钴。
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
开通B管和x管
ωt = 360°
电源U+ →V3→B+→A→V4→电源U-;(V3, V4,FBA-)
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
无刷直流电机的功率和转矩
华北电力大学 电机教研室
《电机学》
即 1MGOe=(100/4π)kJ/m3,
故 100 kJ/m3÷7.96=12.56MGOe。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
(6)最大磁能积(BH)max
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
§25-2 无刷直流电机的工作原理
无刷直流电机的PWM调速
直流电机的ห้องสมุดไป่ตู้WM调速
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
无刷直流电机的PWM调速
直流电机的PWM调速
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
无刷直流电机的PWM调速
《电机学》
§25-2 无刷直流电机的工作原理
转子位置检测
霍尔位置传感器
霍尔效应
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
无刷直流电机的工作原理
左侧的电源和整流 器由直流电源替代, 比如电动自行车或 电动摩托使用电池 作为电源。
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
永磁电机广泛应用于数控机床、精密机器人、航
天、航海、高速列车牵引、电动汽车、电动自行车等 领域。 家电领域的冰箱、洗衣机、空调也在大量使用无 刷直流电机。
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
无刷直流电机的构成
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
(7)居里温度(Tc)
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
(8)可逆磁导率(μr ) 在动态电磁回路中需要知道B-H 退磁曲线的斜 率,称它为可逆磁导率(μr )。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的应用
永磁材料应用于电机
永磁材料的特性参数
(3)剩磁(Br 或Mr) 铝镍钴的剩磁为0.8~1.4T(8000~14000G),钡锶铁
氧体的剩磁为0.2~0.44T(2000~4400G),钐钴2∶17 型 的剩磁为1~1.14T(10000~11400G),钐钴1∶5 型的剩
磁为0.85~1.05T(8500~10500G) , 钕铁硼的剩磁为
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
开通C管和Y管
ωt = 120°
电源U+ →V5→C+→B→V6→电源U-; (V5,V6,FCB-)
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
开通A管和Y管
ωt = 180°
电源U+ →V1→A+→B→V6→电源U-; (V6,V1,FAB-)
电励磁的同步电动机,定子绕组通入交流电流的 前后半个周期时间内,定子磁场对转子磁极的作用力
是相反的。产生的平均转矩为零,无法自起动。
正常的交流永磁电机也没有自起动能力。
华北电力大学 电机教研室
《电机学》
§25-2 无刷直流电机的工作原理
转子位置检测
光电编码器
增量式光电编码器
绝对式光电编码器
华北电力大学 电机教研室
稀土永磁材料的Hci 比Hcb 大很多,退磁曲线测
量到Hcb 时,被测的稀土永磁体几乎没有退磁;只有
测量到Hci 这一点时,稀土永磁体才退磁了。
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
华北电力大学 电机教研室
《电机学》
§25-1永磁材料及其特性参数
永磁材料的特性参数
直流电机的PWM调速
PWM的占空比:
。
调节开关的占空比,调节加在电机绕组上的平均电压 的大小,从而实现直流电机的调速。