混合像元分解_BNU_0425
混合像元分解法操作步骤

混合像元分解法操作步骤1.数据准备-获取多光谱图像数据,可以使用航空或卫星遥感数据。
- 准备高分辨率的真实地物标记(Ground Truth),用于评估分解结果的准确性。
2.选择变量-选择用于混合像元分解的变量,一般是多光谱图像的波段数据。
-可以利用统计学方法、专家知识或试错法来选择最适合的变量。
3.确定光谱参考-选择用于确定混合像元分解的光谱参考数据。
-光谱参考可以是单一的像素或像元组合。
-光谱参考应该具有代表性,并且包含不同地物的特征光谱。
4.混合像元分解-使用混合像元分解模型来计算每个像素的混合成分比例。
-混合像元分解模型通常假设图像中的每个像素是由多个地物的混合成分组成,并输出每个地物的比例。
- 常用的混合像元分解模型包括Spectral Mixture Analysis(SMA)和Linear Spectral Mixture Analysis(LSMA)等。
5.分解结果评估-使用真实地物标记来评估混合像元分解的准确性。
-可以使用混合像元分解的结果与真实地物标记进行对比,计算混淆矩阵或其他评估指标。
-可以根据评估结果来调整或优化混合像元分解模型的参数。
6.结果解释-根据混合像元分解得到的地物比例,进行图像分类、植被指数计算等应用。
-可以通过阈值或其他分类方法将分解得到的比例转化为具体的地物类别。
-可以根据混合像元分解的结果进行地物变化检测、遥感图像解译等分析。
7.结果可视化-可以使用各种图像处理软件将混合像元分解的结果可视化。
-可以使用颜色编码、图形绘制等方法将混合像元分解的结果与原始图像进行对比。
-可以生成分类图像或指数图像等用于进一步分析或展示的结果。
总之,混合像元分解法是一种通过对多光谱图像像素进行分解来获取地物混合成分比例的方法。
它具有广泛的应用前景,并可以通过合理的参数选择和模型优化来提高分解结果的精度和准确性。
常见混合像元分解方法简介二

端元就相当于一个像素里的亚像元,只包含一种地物的光谱信息,根据多光谱或高光谱的高光谱分辨率可以提取出来。
端元只包含一种地物信息,一般的像元都为混合像元,包括多种地物,在进行混合像元分解的时候,可以对一个像元中包括的几种端元进行定量描述,求得每个像元中几种端元在这个像元中的面积百分比,即端元的丰度。
混合像元分解(2011-06-10 14:46:57)转载▼分类:ENVI/IDL学习标签:杂谈混合像元是指在一个像元内存在有不同类型的地物,主要出现在地类的边界处。
混合像元的存在是影响识别分类精度的主要因素之一,特别是对线状地类和细小地物的分类识别影响较为突出,在土地利用遥感动态监测工作中,经常遇到混合像元的难题,解决这一问题的关键在于通过一定方法找出组成混合像元的各种典型地物的比例。
线性混合像元分解由于线性模型是应用最广泛,也是研究最多的算法,下面重点介绍基于线性模型的混合像元分解算法。
一般而言,混合像元分解算法包括数据降维、端元选取和反演三个步骤。
1.数据降维尽管数据降维不是混合像元分解算法的一个必需步骤,但由于大多数算法都将其作为一个流程,我们也将其当作一个步骤。
常用的降维算法有主成分分析(Principle Component Analysis,PCA)、最大噪声比变换(Maximum Noise Fraction,MNF)和奇异值分解(Singular Value Decomposition,SVD)。
(1) 主成分分析:遥感图像各波段之间经常是高度相关的,因此所有的波段参加分析是不必要的。
PCA就是一种去除波段之间相关性的变换。
PCA通过对原数据进行线性变换,获得新的一组变量,即主成分。
其中前几个主成分包含了原数据主要方差,同时各个主成分之间是不相关的。
(2) 最大噪声比变换:最大噪声比变换(Maximum Noise Fraction,MNF)[24]由Green等(1989)提出,该变换通过引入噪声协方差矩阵以实现对噪声比率的估计。
python 混合像元分解方法 -回复
python 混合像元分解方法-回复什么是混合像元分解方法?混合像元分解方法(Mixture Pixel Decomposition)是一种用于解析遥感图像中复杂地物的探测和提取的技术。
遥感图像包含了不同地物的混合像元,即一个像素内存在多种地物的信号。
混合像元分解方法可以将混合像元分离为不同的地物成分,从而获得每个地物的光谱信息,进一步实现对地物进行分类和定量分析。
混合像元分解方法的原理混合像元分解方法通过数学模型对混合像元进行分解,其中最常用的数学模型是线性模型。
假设一个像元包含K 个地物成分,那么混合像元可以表示为K 个地物的线性组合。
即:I = ∑( f * ρ)其中,I 是观测到的混合像元,f 是混合像元中每个地物的系数,表示该地物在混合像元中的比例,ρ是对应地物的光谱响应曲线。
通过对I 进行解析,可以求解出每个地物的成分系数f。
常见的混合像元分解方法1. N-FINDR:N-FINDR 法(Normalized Maximum Likelihood Feature Discrimination)是一种经典的混合像元分解方法。
它通过最大似然估计寻找最优的像元组合,将混合像元分解为基础地物。
N-FINDR 法常用于无监督的遥感图像分类。
2. SISMA:SISMA 法(Spectral Information Subtraction Maximum Likelihood Algorithm)是一种监督的混合像元分解方法。
它引入了监督样本,通过最大似然估计计算每个地物的成分系数。
SISMA 法可以有效地提高分类精度和抑制混合像元效应。
3. VCA:VCA 法(Vertex Component Analysis)是一种基于顶点的混合像元分解方法。
它通过在N 混合像元图中选择顶点,进行解析,找到与顶点最接近的纯地物光谱,从而实现混合像元的分解。
VCA 法适用于对大尺度遥感图像进行定量分析。
混合像元分解方法的应用混合像元分解方法广泛应用于遥感图像解析、地物分类、环境监测等领域。
高光谱遥感影像混合像元分解
精选ppt
23
(4)随机几何模型
该模型和几何光学模型相类似,像元反射率同 样表示为四种状态i的面积权重的线性组合。 即:
R (,x) fi(x)R i(,x)
i
精选ppt
24
(5)模糊模型
基本原理:将各种地物类别看成模糊集合,像元为模 糊集合的元素,每一像元均与一组隶属度值相对应, 隶属度也就代表了像元中所含此种地物类别的面积百 分比。
精选ppt
2
精选ppt
3
精选ppt
4
精选ppt
5
线性光谱混合
非线性光谱混合
8.2 混合像元分解技术
把像元的反射率表示为端元组分的光谱特征和它们的 面积百分比(丰度)的函数。Charles 在1996年将像 元混合模型归结为以下五种类型:
(1)线性(linear)模型 (2)概率(probabilistic)模型 (3)几何光学(geometric—optical)模型 (4)随机几何(stochastic geometric)模型 (5)模糊分析(fuzzy)模型
精选ppt
7
在线性混合模型中,每一光谱波段中单一像元 的反射率表示为它的端元组分特征反射率与它 们各自丰度的线性组合。
从遥感图像的像元光谱信号可以提取像元整体 的表观光谱信息,其表观光谱信息光谱辐亮度
L()是端元光谱辐亮度Lj( j)的线性组
合。
精选ppt
8
植被
混合 像元
reflectance
KLS方法分解的组分影像
精选ppt
KLS(核最小二乘 )方法 分解结果的BDF图
51
混合像元分解及其应用(ENVI操作文本)讲解
一基于PPI的端元提取借助纯净像元指数(PPI)和n维可视化工具用于端元波谱收集。
第一步、获取纯净像元这个步骤是在MNF变换的结果上计算纯净像元指数(PPI),之后选择阈值范围从PPI图像上获得感兴趣区,感兴趣区包含的像元就是比较纯净的像元。
(1)打开高光谱数据。
(2)在ENVI主菜单中,选择Spectral ->MNF Rotation- > Forward MNF -> Estimate Noise Statistics From Dat a。
在标准ENVI文件选择对话框中,选择高光谱图像文件。
(3)打开Forward MNF Transform Parameters面板,选择MNF输出路径及文件名,单击OK执行MNF变换。
(4)在波段列表中输出MNF影像及特征曲线值。
从图中可以看出,大约20个波段以后的MNF的特征值很小(5)MNF变换后,在ENVI主菜单中,选择 Spectral-> Pixel Purity Index->[FAST] New Output Band。
在打开的Pixel Purity Index Input File对话框中,选择MNF变换结果,单击Spectral Subset按钮,选择前面10个波段(MNF后面波段基本为噪声),单击OK。
(6)在Display窗口中显示PPI结果。
选择Overlay->Region of Interest,在ROI Tool 面板中,选择Options->Band Threshold to ROI,选择PPI图像作为输入波段,单击OK,打开Band Threshold to ROI 面板(图14.19)。
Min Thresh Value:10,Max Thresh Value:空(PPI图像最大值),其他默认设置,单击OK计算感兴趣区,得到的感兴趣区显示在Display窗口中。
第二步、构建n维可视化窗口(1)在ENVI主菜单中,选择Spectral ->n-Dimensional Visualizer,在n-D Visualizer Input File 对话框中选择MNF变换结果,单击OK。
常见混合像元分解方法简介
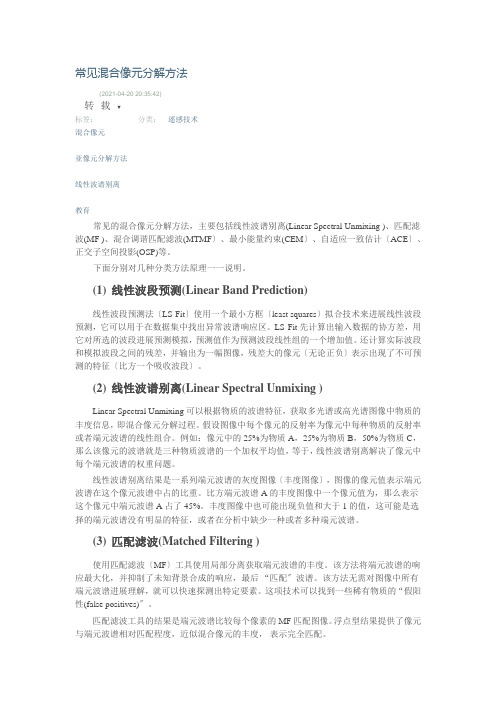
常见混合像元分解方法(2021-04-20 20:35:42)转载▼分类:遥感技术标签:混合像元亚像元分解方法线性波谱别离教育常见的混合像元分解方法,主要包括线性波谱别离(Linear Spectral Unmixing )、匹配滤波(MF )、混合调谐匹配滤波(MTMF〕、最小能量约束(CEM〕、自适应一致估计〔ACE〕、正交子空间投影(OSP)等。
下面分别对几种分类方法原理一一说明。
(1)线性波段预测(Linear Band Prediction)线性波段预测法〔LS-Fit〕使用一个最小方框〔least squares〕拟合技术来进展线性波段预测,它可以用于在数据集中找出异常波谱响应区。
LS-Fit先计算出输入数据的协方差,用它对所选的波段进展预测模拟,预测值作为预测波段线性组的一个增加值。
还计算实际波段和模拟波段之间的残差,并输出为一幅图像,残差大的像元〔无论正负〕表示出现了不可预测的特征〔比方一个吸收波段〕。
(2)线性波谱别离(Linear Spectral Unmixing )Linear Spectral Unmixing可以根据物质的波谱特征,获取多光谱或高光谱图像中物质的丰度信息,即混合像元分解过程。
假设图像中每个像元的反射率为像元中每种物质的反射率或者端元波谱的线性组合。
例如:像元中的25%为物质A,25%为物质B,50%为物质C,那么该像元的波谱就是三种物质波谱的一个加权平均值,等于,线性波谱别离解决了像元中每个端元波谱的权重问题。
线性波谱别离结果是一系列端元波谱的灰度图像〔丰度图像〕,图像的像元值表示端元波谱在这个像元波谱中占的比重。
比方端元波谱A的丰度图像中一个像元值为,那么表示这个像元中端元波谱A占了45%。
丰度图像中也可能出现负值和大于1的值,这可能是选择的端元波谱没有明显的特征,或者在分析中缺少一种或者多种端元波谱。
(3)匹配滤波(Matched Filtering )使用匹配滤波〔MF〕工具使用局部分离获取端元波谱的丰度。
高光谱遥感影像混合像元分解算法研究

高光谱遥感影像混合像元分解算法研究高光谱遥感影像相比多光谱遥感在波段数量和波段范围上提供了更多的信息,利用这些丰富的光谱信息可以更好对地物进行检测和识别。
然而,混合像元的存在严重影响了高光谱数据的使用价值。
混合像元分解方法是解决混合像元问题最有效的手段。
本文是在NLSMA (Non-Local Spectral Mixture Analysis)方法的基础上进行研究。
针对文中使用Kd-tree方法寻找非局部相似块占用内存过大,运算时间长的缺点,提出了基于低秩分解的联合稀疏解混方法。
低秩分解模型将矩阵分解为低秩矩阵,稀疏矩阵和误差矩阵,其约束是稀疏矩阵和误差矩阵的?<sub>?</sub>-范数小于阈值,该模型的优化算法较少且耗时过长,适当放松约束条件,以?<sub>2</sub>-范数来替代约束项中的?<sub>?</sub>-范数,实验表明该方法可以取得同样的效果,并且极大地提高了运算效率。
对图像进行低秩分解后得到许多由许多相似像素构成的相似块,假定相似块中的像素点含有相同种类地物,但是对应的比例不同。
NLSMA方法通过使用联合稀疏方法对每一个相似块进行全限制非负和一求解,即先通过T-MSBL (Transform-Multiple Sparse Bayesian Learning)方法来对多观测向量问题MMV(Multiple Measurement Vectors)进行求解,得到相似块中可能包含的地物种类,再根据FCLS(Fully Constrained Least Squares)方法求得相似块中每一个像素对应的丰度向量。
观察该方法得到的水体丰度图,可以看到有许多非水体的地方丰度系数并不为零。
因此,考虑通过NDWI指标来先把水体提出来,这为以后可以单独提取某种特定地物提供一个框架。
T-MSBL方法相比较其他的MMV算法考虑了观测向量之间的时间相关性。
基于限制性线性光谱分解模型的高光谱影像混合像元分解
基于限制性线性光谱分解模型的高光谱影像混合像元分解摘要:高光谱影像的光谱分辨率在10nm以下,会产生大量的混合像元,因此解决混合像元分解问题对处理高光谱图像有着重要作用。
本文主要论述了高光谱混合像元分解。
其中包括:混合像元分解的概念和物理基础,混合像元线性模型,线性光谱分解模型。
利用线性光谱分解模型进行混合像元分解时有两个步骤:1、端元的提取。
2、混合像元线性分解。
本文将采用纯像元指数法提取端元,采用限制性线性混合模型进行混合像元分解,并以实例进行展现。
关键词:高光谱遥感混合像元分解线性光谱分解模型端元提取纯像元指数法0、引言遥感影像中的像元很少是由单一均匀的地表覆盖类组成,一般都是几种地物类型的混合体。
因此影像中像元的光谱特征并不是单一地物的光谱特征,而是几种地物光谱特征的混合反映,而每个像元则仅用一个信号记录这些“异质”成分。
若该像元仅包含一种类型,则为纯像元,它所记录的正是该类型光谱响应特征;若该像元包含不止一种土地覆盖类型,则形成混合像元[1]。
1、混合像元光谱模型线性模型[2],它基于以下假设:在瞬时视场下,各组分光谱线性混合,其比例由相关光谱的丰度决定。
通过分析残差,使残差最小,完成对混合像元的分解。
因此,第i波段像元反射率可以表示为:(1)式中:i=1,2,…,n;j=1,2,…,m;γi是混合像元的反射率;pij表示第i个波段第j个端元组分的反射率;f j是该像元第j个端元组分的丰度;是第i波段的误差;n表示波段数;m表示选定的端元组分数。
2、采用线性光谱分解模型分解混合像元线性光谱解混是在高光谱图像分类中针对混合像元经常采用的一种方法[3],该方法由两步构成,第一步是提取“纯”地物的光谱,即端元提取;第二步是用端元的线性组合来表示混合像元,即混合像元分解。
2.1端元提取纯净像元指数是一种在多波谱和高光谱影像中寻找波谱最纯净的像元的方法。
通常,波谱最纯净的像元与混合端元相对应。
像元纯净指数通过迭代将N 维散点图映射为一个随机单位向量来计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• • • • • • • •
Target Name: Beijing Image Date: 2005-09-17 LL:039.97, 0116.37 Solar Zenith Angle: 039 Solar Azimuth Angle: -14.367 Observation Zenith Angle: 52.59 Observation Azimuth Angle: 359.41 CHRIS Mode: 3 (LAND CHANNELS)
3) INVERSION
• Least square
ˆ min r XF
2
ˆ U (XT X)1 XT S F • Unconstrained solution • Sum-to-one constrained solution
U ˆF F ˆ U ( XT X) 1 ZT Z( XT X) 1 ZT 1 (Zα ˆ F b)
• In interactive endmember determination, image endmember selection is achieved through an educated trial-and-error approach. An analyst has some knowledge of the field site or data set, and a set of objectives for conducting the analysis.
• QuickBird
• Endmember Selection
• Refer to QB image
0.3
Reflectance
0.1
Reflectance
Vegetation
Soil
Impervious
(a)
0.2
Vegetation
0.3
(b)
0.2
Soil
• Number of endmembers
• Should be smaller than band number • Fewer endmembers is preferred if most variance has been explained
• Spectra of endmembers
• Reference endmember • Image endmember
其中: Z 1,...,1 , b 1
T
• Non-negativity constraint • Full Constrained Least Square (FCLS)
• Heinz, 2001
RESIDUAL ERROR VS. RETRIEVAL ERROR
• Residual error
(Keshava & Mustard, IEEE Signal Processing Magazine, 2002,)
• Graphical illustration of linear mixture models
(Keshava & Mustard, IEEE Signal Processing Magazine, 2002,)
One Peak
Scatter Plot of CHRIS (17m)
WHY WE NEED IT?
• Mixed pixels commonly exist for two reasons
• Spatial resolution of a sensor is low enough that disparate materials can jointly occupy a single pixel • Mixed pixels can result when distinct materials are combined into a homogeneous mixture
混合像元分解
陈学泓
RELATIVE TERMS
• Spectral Unmixing • Spectral Mixture Analysis (SMA) • Sub-Pixel Analysis • Soft Classification
Special issue in IEEE TGRS
1. INTRODUCTION
• Basis of Linear Model
• The reflecting surface is portrayed as a checkerboard mixture, and any given package of incident radiation only interacts with one component (i.e., no multiple scattering between components).
2) ENDMEMBER DETERMINATION
• Reference endmember: in situ measurement
• Calibration is required
• Image endmember: convenient
2) ENDMEMBER DETERMINATION
2. LIL MIXTURE MODEL
• Linear Model
S fi xi w XF w
i 1 m
subject to: fi 1, fi 0, i 1,..., n
i 1
m
其中 S: 表示混合像元反射光谱, S ( s1 , s2 ,..., sL )T , L表示光谱波段数 X : L m矩阵, 表示端元反射光谱,X (x1 , x 2 ,...x m ), xi 表示第i个端元的光谱 F : 表示端元的丰度, F ( f1 ,f 2 , ..., f m )T ,m为端元的数目 w : 误差
WHY WE NEED IT?
• Hard classification: Continuous spectra information are transformed into distinct labels.
Two Peaks
Hard classification is not enough
Scatter Plot of QuickBird
1) DIMENSION REDUCTION
• Maximum Noise Fraction (MNF)
噪声白化
• 与PCA相比,MNF引入噪声的波段相关模型
2) ENDMEMBER DETERMINATION
• Estimate the set of distinct spectra (endmembers) that constitute the mixed pixels in the scene.
ˆ e r XF
• Retrieval error
ˆ F F F true
• They are not equivalent, residual error sometime indicates a lower error than it should be.
EXAMPLES
• Data: CHRIS/PROB
• ii: then the volume of the simplex is
• iii: a trial volume is calculated for every pixel in each endmember position by replacing that endmember and recalculating the volume • iv: repeat until the volume does not inrease
• Automated algorithms may employ statistics to capture variability, but their analytical determination may result in endmember estimates that satisfy some optimality criterion, but are physically unrealistic.
GENERAL UNMIXING PROCEDURE
• Dimension reduction • Endmember determination • Inversion
1) DIMENSION REDUCTION
• Dimension Reduction
• Reduce the dimension of the data in the scene. This step is optional and is only invoked by some algorithms to simplify the operations of subsequent steps. • Principle Component Analysis (PCA) • Maximum Noise Fraction (MNF) • Singular Value Decomposition (SVD)
• Automated method
2) ENDMEMBER DETERMINATION
• Pure Pixel Index (PPI): indicates the purity of each index
• Randomly generating L lines in the N-D space (PCA/MNF space) • Ones falling at the extremes of each line are counted.
WHAT IS SPECTRAL UNMIXING?