第5章点的合成运动习题解答080814
高中物理(新人教版)必修第二册课后习题:第五章习题课运动的合成与分解的两个模型【含答案及解析】

第五章抛体运动习题课:运动的合成与分解的两个模型课后篇巩固提升合格考达标练1.某小船船头垂直于河岸渡河,若水流速度突然增大,其他条件不变,下列判断正确的是()A.小船渡河的时间不变B.小船渡河的时间减少C.小船渡河的时间增加D.小船到达对岸的地点不变,与水速大小无关,选项v,河宽为d,则渡河时间t=dvA正确,B、C错误;由于水速增大,故合速度的方向变化,到达河对岸的地点变化,选项D错误。
2.(2021山东烟台高一期中)光滑半球A放在竖直面光滑的墙角处,用手推着保持静止。
现在A与墙壁之间放入光滑球B,放手让A和B由静止开始运动,当A、B运动到图示位置时,二者球心的连线与水平面成θ角,速度大小分别为v A和v B,则以下关系正确的是()A.v A=v BB.v A=v B sin θC.v A=v B cos θD.v A=v B tan θ,所以两球沿球心连线方向的分速度大小相等,即v A cos θ=v B sin θ,得v A=v B tan θ,故D正确。
3.(多选)如图所示,一人以恒定速度v 0通过定滑轮竖直向下拉小车,使其在水平面上运动,当运动到如图位置时,细绳与水平方向成60°,则此时 ( )A.小车运动的速度为12v 0 B.小车运动的速度为2v 0 C.小车在水平面上做加速运动 D.小车在水平面上做减速运动,如图。
人拉绳的速度与小车沿绳子方向的分速度是相等的,根据三角函数关系:v cos 60°=v 0,则v=vcos60°=2v 0,随小车向左运动,细绳与水平方向的夹角α越来越大,由v=v0cosα知v 越来越大,则小车在水平面上做加速运动,故B 、C 正确。
4.(2021河南焦作期末)不可伸长的轻绳通过定滑轮,两端分别与甲、乙两物体连接,两物体分别套在水平、竖直杆上。
控制乙物体以v=2 m/s 的速度由C 点匀速向下运动到D 点,同时甲由A 点向右运动到B 点,四个位置绳子与杆的夹角分别如图所示,绳子一直绷直。
理论力学-第五章 运动合成与分解

va ve
vr
y
x
O
x
加速度合成定理
例题一
动点
y
y
动系
绝对运动
x
O
x
相对运动
牵连运动
加速度合成定理
y
aa
例题一
y
ae
n aa
x
x O
ar
加速度 方 大 小
n aa
a
a
ar
铅垂
ae
水平
向 由A指向O OA 偏向上方
OA 2
y’ z x x’ O’
O
y
§5-1 点的合成运动的基本概念
动点:P点
定系:Oxy
绝对运动
动系:O’x’y’
相对运动
牵连运动
§5-1 点的合成运动的基本概念
牵连点
§5-1 点的合成运动的基本概念
va ve
ar vr ae
§5-2 点的合成定理
选择动点、动系的原则:
动点与动系不能在同一个物体上。 动点与动系一定要有相对的运动。 动点的相对运动的轨迹要明显、
(*)沿凸轮轮廓线在A点的切线
y
A
x
b
顶杆AB的速度为: vAB =va ve tan OA tan b tan
偏心凸轮
偏心凸轮
偏心凸轮
§5-3 点的加速度合成定理
牵连运动是平动时的加速度合成定理
z’ z
M
r
rO
O
x
r
k’ O’
r rO ' r r rO ' xi yj zk
《理论力学》武清玺第五章_点的运动_习题全解
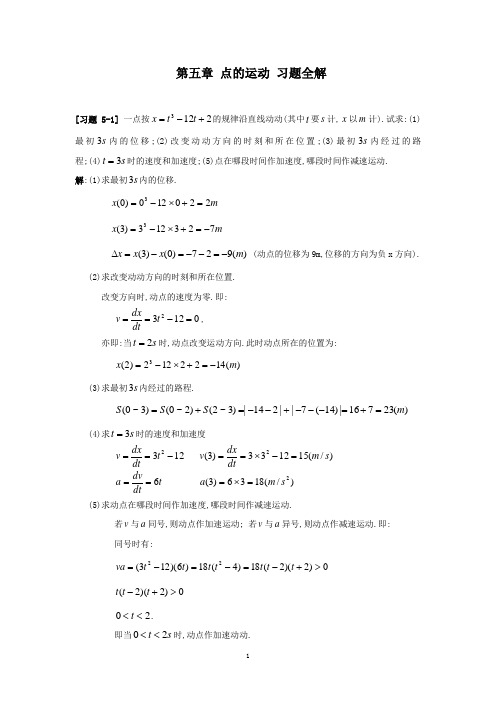
第五章 点的运动 习题全解[习题5-1] 一点按2123+-=t t x 的规律沿直线动动(其中t 要s 计,x 以m 计).试求:(1)最初s 3内的位移;(2)改变动动方向的时刻和所在位置;(3)最初s 3内经过的路程;(4)s t 3=时的速度和加速度;(5)点在哪段时间作加速度,哪段时间作减速运动. 解:(1)求最初s 3内的位移.m x 220120)0(3=+⨯-= m x 723123)3(3-=+⨯-=)(927)0()3(m x x x -=--=-=∆ (动点的位移为9m,位移的方向为负x 方向). (2)求改变动动方向的时刻和所在位置. 改变方向时,动点的速度为零.即: 01232=-==t dtdxv , 亦即:当s t 2=时,动点改变运动方向.此时动点所在的位置为: )(1422122)2(3m x -=+⨯-= (3)求最初s 3内经过的路程.)(23716|)14(7||214|)3~2()2~0()3~0(m S S S =+=---+--=+= (4)求s t 3=时的速度和加速度1232-==t dt dx v )/(151233)3(2s m dt dx v =-⨯== t dtdv a 6== )/(1836)3(2s m a =⨯=(5)求动点在哪段时间作加速度,哪段时间作减速运动.若v 与a 同号,则动点作加速运动; 若v 与a 异号,则动点作减速运动.即: 同号时有:0)2)(2(18)4(18)6)(123(22>+-=-=-=t t t t t t t va0)2)(2(>+-t t t20<<t .即当s t 20<<时,动点作加速动动.Oxy图题25-异号时有:0)2)(2(<+-t t t2>t即当s t 2>时,动点作减速运动.[习题5-2] 已知图示机构中,l AB OA ==,a AC DM CM ===,求出t ωϕ=时,点M 的动动方程和轨迹方程。
点的合成运动刚体的平面运动

做出速度平行四边形, 如图示
ve va cos l cos 45
2 l()
2
小车的速度:v ve
vr
va
ve
[例] 曲柄肘杆压床机构 已知OA=0.15m , n=300r/min , AB=0.76m, BC=BD=0.53m。
图示位置时, AB水平求该位置时的 BD 、 AB 及 vD
解:轴O, 杆OC, 楔块M均作平动, 圆盘作平面运动,P为速度瞬心
vA v12 cm/s ,
vA/PA12/rcos 12/4cos302 3 rad/s
() vo POrsin4sin302 34 3 m/s()
PB PO 2 OB 2 2 PO OB cos120 22 42 2 2 4 1 2 7m 2
解:OA,BC作定轴转动, AB,BD均作平面运动 根据题意:
n 300 10 rad/s
30 30 研究AB, P1为其速度瞬心
vA OA 0.15 10 1.5 m/s ( )
AB
vA AP1
1.5
AB sin 60
1.5 2
0.76 3
7.16 rad/s
vB BP1 AB ABcos607.160.760.57.162.72 m/s
vB PB 2 72 34 2118.3 m/s ( PB)
理论力学 第五章 点的运动学(合)
⋅
τ
+v⋅dτ dt
z 切向加速度 at
第一项反映速度大小随时间的变化率,方向沿切线 方向。
at
=
dvτ
dt
=
d2 sτ
dt2
at
=
dv dt
=
d2 s dt2
25
第五章 点的运动学
z 法向加速度 an ——反映速度方向随时间的变化率
an
=
v
dτ
dt
= v lim Δτ
Δt→0 Δt
方向沿主法线正向。
s
O
正方向:坐标原点O的某一侧为正向。
弧坐标 s :沿轨迹从O到点M的弧长。
M
(+)
B
弧坐标表示的运动方程 s = f (t) = s(t)
21
二、自然轴系
第五章 点的运动学
切线:单位矢量 τ ,指向与弧坐标正向一致。
主法线:单位矢量 n,正向指向凹侧。
副法线:单位矢量 b ,且满足 b = τ × n 。
⑦ at ≡ 0, an = 常数 (匀速曲线运动)
⑧ at = 常数,an = 常数 (匀变速曲线运动)
38
第五章 点的运动学
(4)判断下列运动是否可能出现?若能出现,则判断是 什么运动?
(加速曲线运动) (不可能) (匀速曲线运动) (不可能)
(不可能)
(减速曲线运动) (不可能)
39
第五章 点的运动学
xB = r sin( ωt + θ )
vB = rω cos( ω t + θ )
a B = − rω 2 sin( ω t + θ ) = −ω2xB
运动图线
点的合成运动
2013年7月5日
理论力学CAI
42
1.牵连运动为转动时点的加速度合成定理
设一圆盘以匀角速度 绕 定轴O顺时针转动,盘上圆槽 内有一点M以大小不变的速度 vr 沿槽作圆周运动,那么M点
相对于定系的绝对加速度应是
多少呢?
2013年7月5日
理论力学CAI
43
选点M为动点,动系固结于圆盘上,
则M点的牵连运动为匀速转动, 为常数
y'
y u
x'
M
O
M O
y'
x'
x
O'
2013年7月5日
理论力学CAI
4
车刀以匀速横向走刀,卡盘匀角速度转动,求刀尖相对工件的轨迹。
2013年7月5日
理论力学CAI
5
§8-1 相对运动、牵连运动、绝对运动
归纳为:一点,两系,三种运动
一点
动点:做合成运动的点。
两系
定参考系(定系):固结于地面(地球)。如机座。 动参考系(动系):固结于某运动着的刚体上。
ar = 2l sin
理论力学CAI
37
课后作业1(浙大)
作业题 7-7 7-8 7-9
2013年7月5日
理论力学CAI
38
课后作业1
思考题 8-1 8-2 作业题 8-7 8-8
8-3
8-10
2013年7月5日
理论力学CAI
39
例题
例 曲柄滑杆机构
= 45o 时,, a ; 已知: OA=l ,
例题
已知:AB匀角速度转动。 求:M在导槽EF及BC中运动的速度与加速度。
E
B
C M
第五章 点的运动

HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY ENGINEERING MECHANICS HOHAI UNIVERSITY HOHAI UNIVERSITY
例1:图示机构中A、B两滑块可分别沿互相垂直的两 :图示机构中A 直槽滑动。 直槽滑动。已知BA=a,AM=b,=ωt+α(ω, α为常 y 求点M的运动轨迹、速度和加速度。 量),求点M的运动轨迹、速度和加速度。 M 解: 运动方程: 运动方程:
HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY ENGINEERING MECHANICS HOHAI UNIVERSITY HOHAI UNIVERSITY
A
vA x
I
vA vAt && x = ax = sin R R 2 vA vAt && = a y = y cos R R 2 vA a= R
( a, x ) =
2
aM
O
π
2
; ( a, y ) =
指向A 即a沿MA,指向 沿 指向
§5-3 点的运动的自然表示法
HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY HOHAI UNIVERSITY ENGINEERING MECHANICS HOHAI UNIVERSITY HOHAI UNIVERSITY
理论力学(机械工业出版社)第五章点的运动学习题解答
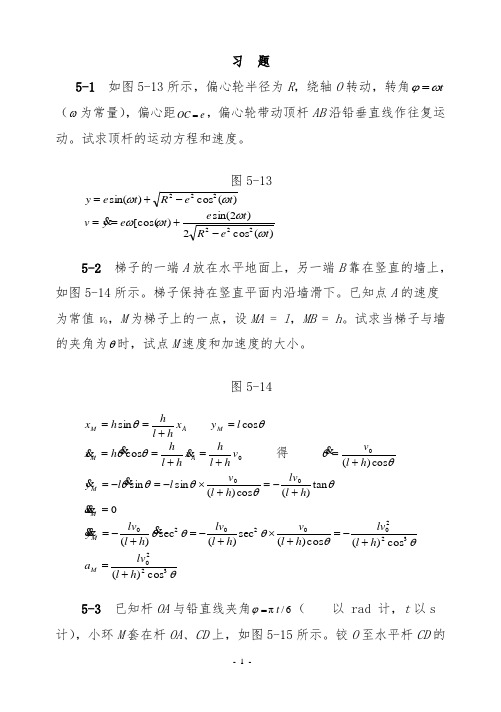
习 题5-1 如图5-13所示,偏心轮半径为R ,绕轴O 转动,转角tωϕ=(ω为常量),偏心距eOC=,偏心轮带动顶杆AB 沿铅垂直线作往复运动。
试求顶杆的运动方程和速度。
图5-13)(cos )sin(222t e Rt e y ωω-+=)(cos 2)2sin()[cos(222t e Rt e t e yv ωωωω-+==5-2 梯子的一端A 放在水平地面上,另一端B 靠在竖直的墙上,如图5-14所示。
梯子保持在竖直平面内沿墙滑下。
已知点A 的速度为常值v 0,M 为梯子上的一点,设MA = l ,MB = h 。
试求当梯子与墙的夹角为θ时,试点M 速度和加速度的大小。
图5-14A M x hl h h x +==θsin θc o s l y M =0c o s v hl h xhl h h x A M +=+== θθ得 θθcos )(0h l v +=θθθθθt a n)(c o s )(s i ns i n 0h l lv h l v l l yM +-=+⨯-=-= 0=M xθθθθθ3222020cos )(cos )(sec )(sec )(h l lv h l v h l lv h l lv y M +-=+⨯+-=+-=θ322cos )(h l lv a M +=5-3 已知杆OA 与铅直线夹角6/πt =ϕ(以 rad 计,t 以s计),小环M 套在杆OA 、CD 上,如图5-15所示。
铰O 至水平杆CD 的距离h =400 mm 。
试求t = 1 s 时,小环M 的速度和加速度。
图5-15ϕtan h x M =ϕϕϕ22s e c 6π400s e c ⨯== h x Mϕϕϕϕϕϕϕsi ns e c 9π200sin sec 6π3π400)sin sec 2(6π4003233=⨯⨯=⨯⨯= M x当s1=t 时6π=ϕm m /s3.2799π800346π400)6π(s e c 6π4002==⨯==M v 223232mm/s8.168327π80021)32(9π200)6πsin()6π(sec 9π200==⨯⨯=⨯⨯=M a5-4 点M 以匀速u 在直管OA 内运动,直管OA 又按tωϕ=规律绕O 转动,如图5-16所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 点的合成运动 本章要点 一、绝对运动、相对运动和牵连运动 一个动点, 两个参照系: 定系,动系; 三种运动:绝对运动、相对运动和牵连运动, 包括三种速度:绝对速度、相对速度和牵连速度; 三种加速度:绝对加速度、相对加速度和牵连加速度; 牵连点:动参考系上瞬时与动点相重合的那一点称为动参考系上的牵连点。 二、速度合成定理 & 动点的绝对速度,等于它在该瞬时的牵连速度与相对速度的矢量和,即
reavvv 解题要领 1 定系一般总是取地面,相对定系运动的物体为动系,动点不能在动系上. 2 牵连速度是牵连点的速度. 3 速度合成定理中的三个速度向量,涉及大小方向共六个因素,能且只能存在两个未知数方能求解,因此,至少有一个速度向量的大小方向皆为已知的. 4 作速度平行四边形时,注意作图次序:一定要先画大小方向皆为已知的速度向量,然后再根据已知条件画上其余两个速度向量,特别注意,绝对速度处于平行四边形的对角线位置. 5 用解三角形的方法解速度合成图. 三、加速度合成定理 1 牵连运动为平移时的加速度合成定理 · 当牵连运动为平移时,动点的绝对加速度等于牵连加速度与相对加速度的矢量和,即
reaaaa,
当点作曲线运动时,其加速度等于切向加速度和法向加速度的矢量和,因此上式还可进一步写成 nrtrnetenataaaaaaa
其中 tvaddata,a2anava,tvaddete,e2eneva,tvaddrtr,r2rnrva,rea,,依次为绝对轨迹、牵连轨迹和相对轨迹的曲率半径。 解题要领 1牵连运动为平移时的加速度合成定理只对“牵连运动为平移时”成立,因此,判定牵连运动是否为平移至关重要. 2 牵连运动为平移时的加速度合成定理涉及的三个加速度,每一加速度都可能有切向和法向加速度。但是,法向加速度只与速度有关,因此,可以通过速度分析予以求解,从而在此处是作为已知的。剩下的三个切向加速度的大小方向共有六个因素,能且只能有2个未知量时方可求解。 3 因加速度合成定理涉及的矢量较多,一般不用几何作图的方法求解,而是列投影式计算,千万不能写成“平衡方程”的形式。 4 在加速度分析中,因动点和动系的选择不当而出现了一种似是而非的分析过程。教材中例5.3.5的一个典型错误解法如下: $ 例:半径为r的半圆凸轮移动时,推动靠在凸轮上的杆OA绕O轴转动,凸轮底面直径DE的延
长线通过O点,如图所示。若在30的图示瞬时位置,已知凸轮向左的移动速度为u,加速度为a且与u反向,求此瞬时OA杆的角速度与角加速度。
! “解”:取OA杆上与凸轮相接触的B点为动点,动系固结在凸轮上。设OA杆的角 速度和角加速度分别为 和。 1)速度分析: 根据速度合成定理,可画出速度平行四边形如图所a示。由几何关系可得
uvv2130sinea, uvv2330coser
方向如图所示。由此可求得OA杆在图示瞬时的角速度为
ruurOBvω63230ctg1a
,
转向如图所示。 …
(a) (b) 2) 加速度分析: 根据牵连运动为平移时的加速度合成定理,有 nrtrenataaaaaa
大小: αOB 2OB a BCv2r 方向: OA 指向O点 ← BC 指向C点
加速度矢量关系图如图b所示。在这个矢量关系式中,各加速度分量的大小、方向共有十个要素,已知八个要素,可以求解。将图示的加速度矢量关系向CB方向投影,得
ruaru/aBCvaaaa43223230sin30sin222
rnreta
,
taa为负值说明aa的真实指向应与图设的指向相反。由此,可求得OA杆在图示瞬时的角加速度
的大小为
ruarrr/ua/BCaOBaα2323343230ctg
22tata
,
— 转向如图所示(由taa的真实指向决定)。
上述解法是“避免 ”了取OA 杆为动系时出现的科氏加速度,错在何处这不难从杆OA 的转动方程
xRsin,
对时间求导求得OA 杆的角速度和角加速度值得到验证,式中OAx。可以看到,速度分析的结果是正确的,而加速度分析结果是错误的。原因是“取OA杆上与凸轮相接触的B点为动点”,此动点只在此瞬时与凸轮相接触,随后就分道扬镳了,其相对轨迹不是凸轮轮廓线,相对轨迹不清楚,因此,上面分析中nra用凸轮轮廓线的半径作为相对轨迹的曲率半径的计算是错误的。
2 牵连运动为转动时的加速度合成定理 牵连运动为转动时点的加速度合成定理:当牵连运动为转动时,动点的绝对加速度,等于该瞬时动点的牵连加速度、相对加速度与科氏加速度的矢量和
creaaaaa,
其中科氏加速度为rec
ω2va,当相对速度矢量与牵连角速度矢量垂直时,相对速度顺着牵连角速度转90的方向就是科氏加速度的方向,大小为reω2vac.当点作曲线运动时,其加速度等于切向加速度和法向加速度的矢量和,因此上式还可进一步写成
cnrtrnetenataaaaaaaa.
( 解题要领:
1 在加速度分析中要特别注意动系是否有角速度,如果有,就要考虑科氏加速度。 2 牵连运动为转动时的加速度合成定理涉及的矢量较多,最多有7个矢量,分析和列投影式时不要遗漏了。 3 法向加速度和科氏加速度只与速度和角速度有关,因此,在加速度分析时应作为是已知的。
4 牵连运动为转动时的加速度合成定理只可以解2个未知量。
第五章 点的合成运动 习题解答 5-1 在图a、b所示的两种机构中,已知20021aOOmm,31rad/s。求图示位置时杆AO2的角速度。
解:(1)取杆AO1上的A点为动点,杆AO2为动系。1aav,由reavvv作速度平行四边形(如题5-1图a所示),得
avv1ae2330cos,
rad/s5.1212e2
AO
v
, (逆时针)
(2)取滑块A为动点,杆AO1为动系, 1eav,由reavvv 作速度平行四边形(如题5-1图b所示),得
1ea3
230cosavv,
rad/s23212a2AO
v
.(逆时针)
… 5-2图示曲柄滑道机构中,杆BC为水平,杆DE保持铅直。
曲柄长10.OAm,并以匀角速度20rad/s绕O轴转动,通过滑块A使杆BC作往复运动。求当曲柄水平线的交角分别
题5-2图
(a) {
( b) 为0、30、90时杆BC的速度。 解:取滑块A为动点,动系为BCE杆。m/s 2OAav. 由 reavvv 得 sinaevv 当0 时, 0ev ;当30时,m/s 1ev; 当90时,m/s 2ev . 5-3图示曲柄滑道机构中,曲柄长rOA,并以匀角速度饶O轴转动。装在水平杆上的滑槽DE与水平线成60角。求当曲柄与水平线交角0、30、60时,杆BC的速度。 解:取滑块A为动点,动系为杆BC,rvOAa. 作速度矢量图如图示。
由正弦定理 )30-sin()60-sin(180eavv, 解得 )30-sin(32-erv.
当0时, 33evr; 当30o时, 0ev; 当60o时, 33evr (向右). 5-4如图所示,瓦特离心调速器以角速度绕铅垂轴转动。由于机器转速的变化,调速器重球以角速度1向外张开。如该瞬间10rad/s,1.2rad/s1。球柄长500mml,悬挂球柄的支点到铅垂
的距离为50mme,球柄与铅垂轴间所成的夹角30。求此时重球绝对速度的大小。
~
% 题5-3图
题5-4图 解:取重球为动点,转轴AB为动系,则 lvr,方向如图示;牵连速度sinelev,方向与ADB垂直。根据 reavvv,
由勾股定理得 m/s059.32r2eavvv. 5-5图示L形杆BCD以匀速v沿导槽向右平动,CDBC,hBC。靠在它上面并保持接触的直杆OA长为l,可绕O轴转动。试以x的函数表示出直杆OA端点A的速度。
解: 以L形杆上的B为动点,OA杆为动系,则动点相对于动系做直线运动。vva,设OBC
为,由速度合成定理得
vxhhvv22aecos,
由此可求得vxhhllxhvveA2222. 也可以利用以下关系解出Av。由hxhxarctan,tan,vtx ) vxhhlrvxhvhhxhvtA22222,1dd.
5-6如图所示,摇杆OC绕O轴转动,拨动固定在齿条AB上的销钉K而使齿条在铅直导轨内移动。齿条再传动半径100rmm的齿轮D。连线1OO是水平的,距离400l mm。在图示位置,摇杆角速度50.rad/s,30。试求此时齿轮D的角速度。
解: 解法一: 分两步计算。 (1)计算齿条AB的速度。取K为动点,OC杆为动系,则OKv
e. 由速度合成定理得:
题5-5图 题5-6图