全站仪精度分析资料
全站仪三角高程测量的精度分析
牛 东峰 1 董 婉 丽 2
( 1中冶集 团武汉勘 察研 究 院有 限公 司 湖北 武 汉
摘
4 0 8 2吉林 市规 划局 检 察支 队 吉林 吉林 300
12 1 ) 3 0 1
要 : 站仪 三 角高程 测量具 有效 率 高 、 全 实施灵 活等优 点 , 经研 究 并通过 实践验 证 , 对观测 结果 进 在
参 考 文 献 1 闫修 林 . 增 苗 . 波 图 技 术 在 雷 达 终 端 阮 杂
系列 处理 .完 成 后 传送 N RC通 道 输
出及 控 制参 数 .同时 在 引脚 F A 上 L G1
产生低 脉 冲 .使 AD P 4进 入 中断服 务 S#
程序 , 收 由 A S # 送 出的数 据 。 接 DP1
有 限 , 前 只 在 中 、 比例 尺地 形 图测 以 小
1 三 角 高 程测 量 高差 计 算
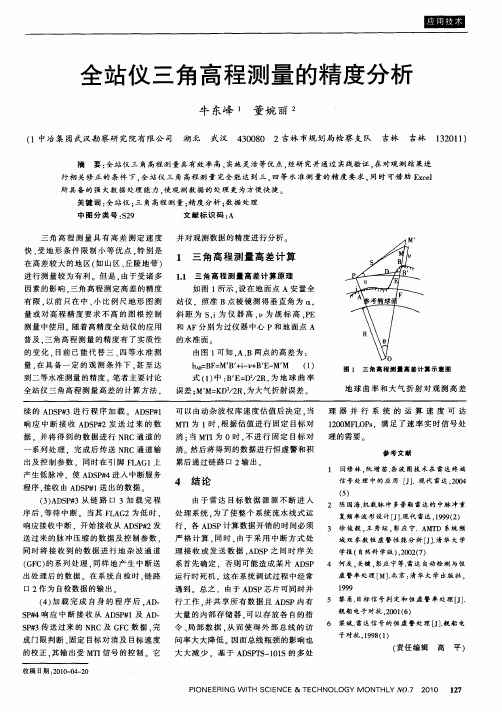
11 三角 高程测 量高 差计 算原 理 .
如 图 1所 示 . 在 地 面 点 A 安 置 全 设
站仪 .照 准 B点 棱镜 测 得垂 直 角 为 . 斜 距 为 S, 为 仪 器 高 , i v为 觇 标 高 , E P 和A F分别 为 过仪 器 中心 P和地 面点 A
2 陈 国海. 机栽 脉 冲 多普 勒雷达 的 中脉 冲重 复频 率波形 设计 [ ] J. 现代 雷达 ,9 9 2 19 ( ) 3 徐俊 毅 , 秀坛 , 王 彭应 宁.AMT 系统 频 D
响 应 接 收 中断 .开 始 接 收 从 AD P 2发 行 .各 AD P计算 数据 开销 的 时间必 须 S# S
的 水 准 面
全站仪极坐标法变形监测的精度分析

2秒级全站仪极坐标法变形监测的精度分析一、极坐标法测量原理如图所示,A、B为已知点,A点坐标为(xA,yA)、B点坐标为(xB,yB),p为待定极坐标测量法示意图点。
通过测定AB边与Ap边的夹角β,Ap边垂直角ν以及Ap边的斜距S,可通过计算出AB边坐标方位角αAB和Ap边平距D,求得p点的坐标。
计算式如下:…………………………………………①…………………………………….……………. ②………………………….………………………③}…………………………………………...④二、极坐标法测量精度分析由于是独立观测值,也是相互独立的。
对以上②、③微分得…………………………………………………………⑤……………………………...⑥再对④微分得}……………………………………⑦上式可写为………………………………….⑧因此,p点的协方差阵为其显式形式为由以上显式,可推出P点的方差写成中误差形式即为……………………………………………..⑨三、极坐标法测量误差估算按照全站仪的标称精度,如采用2″级全站仪,标称精度测角为±2″、测距为2+2ppm,当已知点至待定点之间间距为100m时,取将⑥式按照误差传播定律写成取估算Ap边平距测量误差:当点间高差较小时,垂直角测量误差对平距的影响可忽略不计;取ν为15°时,平距测量误差为±2.06mm。
可见垂直角大小对平距测量精度影响不大,只取决于测距本身精度,距离越长,精度越低。
由⑨式计算p点坐标中误差为四、提高极坐标法测量精度的方法与途径从以上误差估算可以看出,在测站与待定点间距较小的情况下,提高测角精度对于提高待定点精度的意义不大,而距离测量精度直接制约着待定点的测量精度。
要提高近距离极坐标法的测量精度,除视线(测距光路)离开周边物体距离应大于0.3m以上(降低大气旁折光影响)不穿越水沟、河面(防止水面对测距电磁波的影响)以外,重点应在以下两个方面:1、增加距离测量测回数,提高测距精度。
[整理版]谈全站仪的高程测量精度
![[整理版]谈全站仪的高程测量精度](https://img.taocdn.com/s3/m/b7a625c2b8f3f90f76c66137ee06eff9aef849ec.png)
谈全站仪的高程测量精度
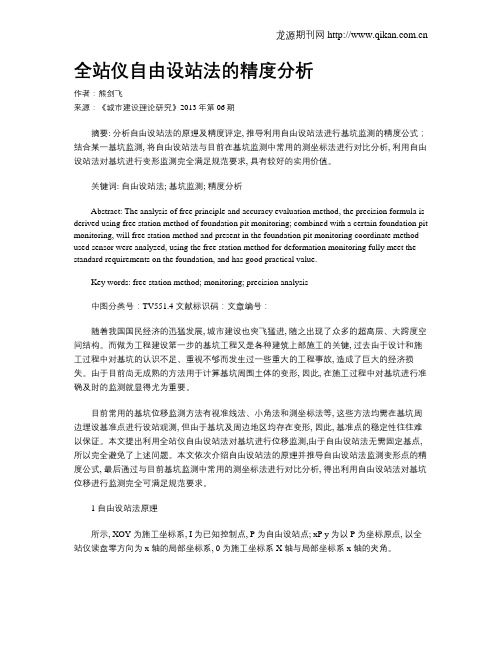
本人在从事工程技术管理的工作中,经常听到有测量工程师抱怨说某某全站仪不好用,测高程测不准。
于是我问他:测距离准不准?得到回答是,测距离没问题!于是我就奇怪了,为什么测距离准,测高程不准呢?全站仪工作时测得夹角a和距离L,如下图:
s H
L
a
H=L*sina
S=L*cosa
既然S准确,相应的H也应该准确,因为他们的计算变量都是一样的。
但经过本人实际操作,全站仪测高程精度确实比较差。
到底是什么原因使得同样的参数,计算出来的结果一个精确,另一个却不精确呢?进过详细分析,本人发现其实并不是仪器的问题,而是误差给大家带来的麻烦:
90sinx
cosx Y
Y1
Y2
上图是正弦曲线和余弦曲线示意图,我们可以发现在全站仪镜头水平x=0°—竖直x=90°期间y值的变化,当我们在接近0°附近测量时f(x)=cosx相对于g(x)=sinx对x的增量来说不敏感,也就是说,当我们在仪器测量a角时,一个增量Δa引起的S的变化比H的变化小的多,而实际操作中,各位测量工程师也会发现,由于仪器的构造限制,很少有机会在测量的时候使全站仪仰俯超过45°,而真正当仰俯角超过45°,(例如在近距离测量盖梁或者墩顶高程)时,全站仪的高程测量精度并不比水平坐标的测量精度低。
例如:sin10.1-sin10=0.00171855,cos10.1-cos10=-0.0003045,这表明在角度误差0.1°的情况下,瞄准接近100米的目标,高程会差17cm,而距离只差3cm,这就是为什么大家都抱怨全站仪测高程不精确的原因。
全站仪在铁路测量中的精度控制
全站仪在铁路测量中的精度控制摘要:探讨了全站仪在铁路测量中的应用和精度分析,阐述全站仪在铁路测量中的误差精度控制,进一步强化全站仪在铁路测量作业中的运作效率,提高测量的精准度,旨在为相关研究提供参考资料。
关键词:全站仪;误差分析;精度控制;铁路测量;引言:随着铁路建设规模的扩大和列车运行速度的提升,对铁路轨道的测量工作提出了更加严格的要求。
在铁路测量中应用全站仪能够有效保证测量效率和精度,为铁路线路的养护维修提供更为准确的依据。
另外,全站仪采用的X、Y、H三维坐标可以直观反映线路实际情况,同时可利用计算机对数据和图形进行灵活处理。
因此,为确保铁路工程整体施工质量,达到规范要求精度的控制,对于铁路测量中全站仪的精度控制研究至关重要。
1.全站仪的概念及原理全站仪是集光、机、电为一体集合了垂直角、水平角、距离、高差测量功能的测绘仪器。
对于一次测量工作可以一次性完成因此称为全站仪一般应用于公路、铁路隧道的测量或者监控。
全站仪具有自动记录和显示的功能用自动代替了人工光学微读数简化操作步骤避免误差产生因其自动化的功能使得测量时间缩短节约了人力、物力。
全站仪利用了电子经纬仪其竖直度盘和水平度盘及其读数设置采用了两个编码盘和读数传感器进行角度测量根据测角精度的不同可以为0.5”、1”、2 ”、3 ”、5”、10”等几个等级[1]。
2.全站仪在使用中的误差分析2.1 轴系误差经纬仪在光学原理上更加突出,具有全站仪不能具备的优势,而全站仪在轴系方面存在更多的误差。
为控制轴系误差,就要正确认识轴系误差产生的原因。
具体来说,全站仪产生轴系误差的原因主要包括以下3个方面:(1)环境温度和气压的变化。
当测量环境的温度和气压变化较大时,尤其是测点间温度和气压差距较大时,全站仪视准轴位置会出现明显波动,视准轴的变动会直接引发轴系误差[2]。
(2)镜头安装调整不当。
在测量时,如果出现全站仪镜头安装与调整不当的情况,就会直接导致全站仪镜头中的望远镜十字丝中心偏离正确位置,进而导致视准轴偏离正确的仪器水平方向,产生轴系误差。
全站仪精度分析

全站仪精度分析全站仪代替水准测量精度分析1.引言目前, 在水准测量中, 水准仪仍然是主要的使.用仪器, 但山丁仪器本身的原因, 其仅使用于平坦地区在地形较复杂地区使用水准仪进行水准测量, 测站数很多, 精度也很难保障。
随着电子技术的发展, 与全站仪的普及, 测距精度已人人提高。
全站仪己普遍用于控制测量、地形测量和上程测量中。
但是能否使用全站仪代替水准仪进行水准测量是广大测量所关心的问题, 本文结合全站仪三角高程测量的原理和方法, 并将其主要误差来源与水准仪进行对比分析, 进而分析其代替水准测量的可行性。
全站仪三角高程测量及其精度分析根据误差传播定律,得到(2) 式计算高差中误差为:则(3) 式可化简为如果取测角标准差mα= ±1″,测距标准差m S = ±(2 + 2 ×10 - 6 S ) mm ,仪器高和棱镜高量取中误差m g= ±110 mm ,则对应不同的竖直角α和倾斜距离S ,对向观测高差的中误差见表1 所示。
表1 对向观测高差中误差(单位:mm)从实验数据分析可看出:对向观测高差中误差随着竖直角及视线斜距的增大而增大。
对于短测距边长,仪器高和棱镜高量测误差是全站仪三角高程的主要误差。
若取二倍中误差作为三角高程极限误差,则对于测角中误差为±1″全站仪,对向观测法在测距边长大于100 m 情况下,其三角高程精度可以满足三等水准限差要求。
2 中间观测法不同方向的大气折光系数是有差异的,因而简单地进行对向观测加以抵消与实际的情况有出入。
为了提高三角高程观测精度,可采用中间观测法,即将全站仪置于A 和B 两点大致中间位置处,设S A 、S B 分别为测站与测点A 和B 之间的倾斜距离; D A 、D B 分别为测站与测点A 和B 之间的水平距离;αA 、αB 为全站仪照准棱镜中心的竖直角; i 为仪器高; v A 、v B 为棱镜高; R 为地球曲率半径。
关于全站仪对向观测法的精度分析
式中:R——地球的平均半径6 371km,K大气折光系数。因此,上述( 1) 式 可表 达为 :
驴S劬+,+i - -v=s s i n口+等s2 CA)s2川一v。’
塞 霎 Ⅵ 渊 I I 11。
关于全站 仪对向观测法的精 度分析
胡宝 华 ( 宁 夏工 业职 业学 院宁 夏石 嘴山 753000)
,【擒要 ] 伞站仪己广泛 用于工程测量中 ,根据全站仪对 向观测法,三 角高程测量的原 理,对其高差精 度进行分析,阐 述在一定范围 内可用上述测量 方法代替三、四 等水准测最的见解。
回
业作 出 贡献.
参考文献: [ 1] 刘哗东,热处理变形浅析.机械工人:热加工.2007年l O期. [ 2] 雷声.齿轮热处理变形的控制.机械工程师.2008年5期. [ 3] 魏强、刘晓清,热处理淬火变形的控制.汽车工艺与材料.2008年7期
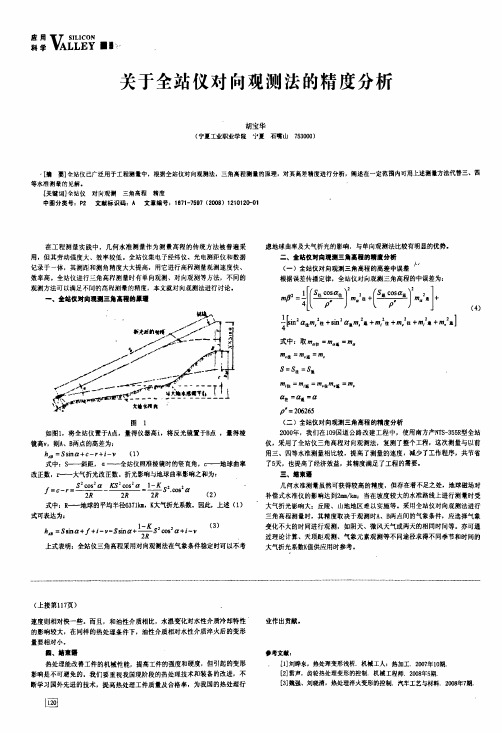
一、 全站 仪对向 现羽三 角高程 的曩 曩
图1
如图1 ,将全站仪置于A点,量得仪器高i ,将反光镜置于B点.量得棱 镜高v,则^、B两 点的高差为:
h as=Ssi n a +c一 ,+i —V
( 1)
式中:s——_ 斜距,a——全站仪照准棱镜时的竖直角,c——地球曲率
改正数.r一大气折光改正数。折光影响与地球曲率影响之和为:
毋{[ (学)2《往+( 学] 2《遁]+㈥
丢}i n2口往埘,2往+sin z口蠢历.2近十所,2往十朋,2往&
用- 往2m.近2m。
S=S往=S鼍
全站仪自由设站法的精度分析
全站仪自由设站法的精度分析作者:熊剑飞来源:《城市建设理论研究》2013年第06期摘要: 分析自由设站法的原理及精度评定, 推导利用自由设站法进行基坑监测的精度公式;结合某一基坑监测, 将自由设站法与目前在基坑监测中常用的测坐标法进行对比分析, 利用自由设站法对基坑进行变形监测完全满足规范要求, 具有较好的实用价值。
关键词: 自由设站法; 基坑监测; 精度分析Abstract: The analysis of free principle and accuracy evaluation method, the precision formula is derived using free station method of foundation pit monitoring; combined with a certain foundation pit monitoring, will free station method and present in the foundation pit monitoring coordinate method used sensor were analyzed, using the free station method for deformation monitoring fully meet the standard requirements on the foundation, and has good practical value.Key words: free station method; monitoring; precision analysis中图分类号:TV551.4 文献标识码:文章编号:随着我国国民经济的迅猛发展, 城市建设也突飞猛进, 随之出现了众多的超高层、大跨度空间结构。
而做为工程建设第一步的基坑工程又是各种建筑上部施工的关键, 过去由于设计和施工过程中对基坑的认识不足、重视不够而发生过一些重大的工程事故, 造成了巨大的经济损失。
全站仪原理介绍精度分析与应用

线性CCD 阵列
确定其位置,一般需要捕获至少10
条编码线信息。在实际角度测量过 程中,单次测量包括大约60条编码 线,因此通过取平均和内插的方法 可以进一步提高角度的测量精度。
条码编码度盘
29
徕卡全站仪的十大技术特点
4、小巧精密的液态双轴补偿系统
同样是液体补偿器,徕卡新型垂直轴液体补偿器在光路上更加 紧凑,并用一线性CCD阵列解决双轴的补偿问题。 精密而小巧的结构,使液体补偿
精度后,启动距离和角度的测量。
ATR的目标照准过程
33
徕卡全站仪的十大技术特点
6、测距信号超高频技术
根据相位法测距原理,提高测距
信号的频率,有利于提高测距精 度。徕卡全站仪采用当今世界上
最高的测距信号频率,使之位居
世界全站仪最高测距精度之颠, 当然具有坚实的理论基础。
34
徕卡全站仪的十大技术特点
由于计数器只能记忆整数个的时钟周期, 所以不足一个时钟周期的时间就被丢弃掉,那么这就形 成了计时上的误差,从而影响了测距的精度。如果将时 钟脉冲周期缩短,那么丢弃掉的时间就会越小,测距的 精度就会提高。但实际上这个时钟脉冲周期并不能无限 缩短。
13
一、全站仪基本原理及组成
光电测距仪分脉冲式和相位式,相位式:将发射的光波调制成正弦波的形式,通
过测量正弦光波在待测距离上往返传播的相位移来解算距离的,也就是通过测量光波 传播了多少个周期来解算距离。
14
一、全站仪基本原理及组成
光电测距仪分脉冲式和相位式,相位式:
在相位式光电测距仪中有一个电子部 件,叫做相位计,它将发射镜发射的正弦 波与接收镜接收到的正弦波的相位进行比 较,就可以测出不足一个周期的小数,其 测相误差一般为1/1000,所以相位式测距 ,距离越短,精度越高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
———————————————————————————————— 作者:
———————————————————————————————— 日期:
ﻩ
全站仪数字测图在城市测量中的误差估计
随着现代高新技术的发展与运用,促使测绘工作正从传统的测绘技术手段向现代数字测绘过渡,全站仪在现代测绘工作中的应用比例也越来越大。因此,有必要对全站仪在使用过程中的误差产生及大小做分析。
全站仪是全站型电子速测仪的简称,它集电子经纬仪、光电测距仪和微电脑处理器于一体,因此,它也兼具经纬仪的测角误差和光电测距仪的测距误差性质。本文分别对这两项误差在城市测量中的大小进行分析,然后综合两方面的影响对地面点的点位误差进行分析与估算。最后单独分析全站仪的高程误差。
一、全站仪测图点位中误差分析
1、全站仪测角误差分析
比例
距离D
MD
标称测角精度"
Mβ"
M( mm)
1:500
150
3.3
2
50.4
36.8
5
51.2
37.4
1:1000
250
3.5
2
30.2
36.8
5
31.6
38.5
1:2000
400
3.8
2
19.1
37.2
5
21.2
41.3
由以上分析及计算数据知,全站仪在测图运用中的点位精度远远优于规范给出的精度(附表)要求。
下面就以上分析,根据《城市测量规范》中给出的各比例测图,图根控制测量与各比例测图测距限值,通过计算得出下表:
比例
emm
e1mm
e2mm
S1mm
S2mm
M中
M偏"
M标"
M测"
Mβ"
1:500
3
5
50
80
150
8.4
49.5
2
4
50.4
5
10
51.2
1:1000
3
5
50
150
250
4.7
29.6
2
4
30.2
检验合格的全站仪水平角观测的误差来源主要有:
①仪器本身的误差(系统误差)。这种误差一般可采用适当的观测方法来消除或减低其影响,但在全站仪测图中对角度的观测都是半测回,因此,这里还是要考虑其对测角精度的影响。分析仪器本身误差的主要依据是其厂家对仪器的标称精度,即野外一测回方向中误差M标,由误差传播定律知,野外一测回测角中误差M1测= M标,野外半测回测角中误差M半测= M1测=2M标。
5
10
31.6
1:2000
3
5
50
250
400
2.8
18.5
2
4
19.1
5
10
21.2
2、全站仪测距的误差估计
目前全站仪大多采用相位式光电测距,其测距误差可分为两部分:一部分是与距离D成正比例的误差,即光速值误差,大气折射率误差和测距频率误差;另一部分是与距离无关的误差,即测相误差,加常数误差,对中误差。故,将测距精度表达式简写成MD=±(A+B×D),式中A为固定误差,以mm为单位,B为比例误差系数以mm/km为单位,D为被测距离以km为单位。目前测绘生产单位配备的测图用全站仪的测距标称精度大多为MD=3mm+2mm/km×D。在这里D取测站点到待测点之间的《城市测量规范》规定的限值。通过计算得到各比例尺测图中测距中误差值MD,如下表:
二、全站仪测图高程中误差分析。
众所周知,全站仪测图的高程为三角度程,而三角高程单向观测的高差计算公h=D×tanαv+(1-k)D2/2R+i-v,对公式进行全微分求出真误差关系式,然后根据误差传播定律求出中误差平方关系式为:Mh2=(tanαv+(1-k)D/R)2MD2+(D×secαv)2Mαv+(D2/2R)2Mk2+Mi2+Mv2。由中误差平方关系式分析各变量的取值。
②对上述出数关系式全微分,求出具真误差关系式:△X=cosβ△D-D×sinβ△β, △Y=sinβ△D+D×sinB△B
③根据误差传播定律写出中误差平方关系式:
Mx2=cos2βMD2+D2sin2βM2β
My2=sin2βMD2+D2cos2βMβ2
M= = ,此式就是点位中误差与角度中误差Mβ,距离中误差MD及距离D的关系式,根据此式及《城市测量规范》规定的D的限值,通过计算得出下表:
③目标偏心误差对水平角测角的影响,《测量学》教材推导出的化式为m偏=ρ /2×√(e1/S1)2+(e2/S2)2,S1、S2的取法与对中误差中的取法相同,e1取仪器设站时照准后视方向的误差,此项误差一般不会超过5mm,取e1=5mm,e2取全站仪在测图中的照准待测点的偏差。因为常规测图中棱镜中心往往不可能与地面点位重合,偏差为棱镜的半径R=50mm,固取e2=50mm因为对中误差与目标偏心误差均为“对中”性质的误差,就对中本身而言,它是偶然性的误差,而仪器一旦安置完毕,测它们就会同仪器本身误差一样同时对测站上的所有测角发生影响,根据误差传播定律,则测角中误差Mβ= 。
3、分析大气垂直折光差系数误差,根据《城市测量规范》条文说明中对此项的分析,估计Mk=+0.05,
4、在城市数字测图中地形的起伏一般不会超过25°这里取αv=25°
比例
D(km)
MD(mm)
1:500
0.150
3.3
1:1000
0.250
33、分析全站仪测图的点位中误差M
根据前面对测角和测距精度的分析,运用误差传播定律来分析估计全站仪测图在工作中的实测点位中误差(相对于图根点)。
①建立定点(XY)与角度(β)、距离(D)之间的出数关系式,X=Dcosβ,Y=Dsinβ;
1、分析竖角测角精度,全站仪的标称精度为M标,则测图中竖角的半测回中误差M半测=2M标(与前面水平角分析类似)。
2、分析仪器高i与目标高v的量取精度,根据本人在工作中的经验,两次量取仪器高i与目标高v的差数不会超过3mm,即d≤3mm,运用误差传播定律同精度双观测求中误差公式则Mi=Mv= =±2.1mm。
②仪器对中误差对水平角精度的影响,仪器对中误差对水平角精度的影响在《测量学》教材中有很详细的分析其公式为M中=ρe/ ×SAB/S1S2其中e为偏心距,熟练的仪器操作人员在工作中的对中偏心距一般不会超过3mm,这里取e=3mm。S1在这里取全站仪测图时的设站点(图根点)至后视方向是(另一通视图根点)之间的距离,S2取全站仪设站点至待测地面点之间的规范限制的最大距离。由公式知,对中误差对水平角精度的影响与两目标之间的距离SAB成正比,即水平角在180时影响最大,在本文讨论中只考虑其最大影响。