机械原理课后全部习题答案
机械原理习题册答案
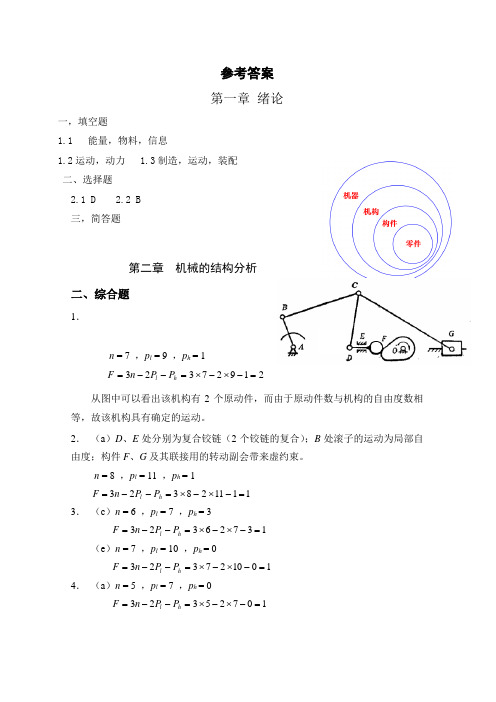
参考答案 第一章 绪论一,填空题1.1 能量,物料,信息1.2运动,动力 1.3制造,运动,装配 二、选择题2.1 D 2.2 B 三,简答题第二章 机械的结构分析二、综合题1.n = 7 ,p l = 9 ,p h = 121927323=-⨯-⨯=--=h l P P n F从图中可以看出该机构有2个原动件,而由于原动件数与机构的自由度数相等,故该机构具有确定的运动。
2. (a )D 、E 处分别为复合铰链(2个铰链的复合);B 处滚子的运动为局部自由度;构件F 、G 及其联接用的转动副会带来虚约束。
n = 8 ,p l = 11 ,p h = 1111128323=-⨯-⨯=--=h l P P n F3. (c )n = 6 ,p l = 7 ,p h = 313726323=-⨯-⨯=--=h l P P n F(e )n = 7 ,p l = 10 ,p h = 0101027323=-⨯-⨯=--=h l P P n F 4. (a )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅱ级组 因为该机构是由最高级别为Ⅱ级组的基本杆组构成的,所以为Ⅱ级机构。
(c )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅢ级组因为该机构是由最高级别为Ⅲ级组的基本杆组构成的,所以为Ⅲ级机构。
5. n = 7 ,p l =10 ,p h = 0101027323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅲ级组当以构件AB 为原动件时,该机构为Ⅲ级机构。
Ⅱ级组 Ⅱ级组 Ⅱ级组当以构件FG 为原动件时,该机构为Ⅱ级机构。
可见同一机构,若所取的原动件不同,则有可能成为不同级别的机构。
6. (a )n = 3 ,p l = 4 ,p h = 101423323=-⨯-⨯=--=h l P P n F因为机构的自由度为0,说明它根本不能运动。
机械原理 课后习题答案
⎛ ⎜ ⎝
m / s2 mm
⎞ ⎟ ⎠
作加速度图
C
2
3
D
B
p(d) 4
(c3)
b2 (b1) (b3)
题3-8 c) 解(续2)
[解]
(3)加速度分析 aB 2 (= aB1) → aB3 → aC 3
1) 求aB2
A 1 ω1
2) 求aB3
aB3
=
an B3D
+
at B3D
=
aB
2
+
ak B3B2
得d点
p(c3)
E
vD = μv pd = 0.005 × 44.6 = 0.223 (m / s)
作 de ⊥ bc2
并使
de = DE = lDE = 40 bd BD lBD 50
得e点
vE = μv pe = 0.005 × 32.0 = 0.16 (m / s)
3) 求ω2
ω2
=
vC 2B lBC
p' = 2p'l + p'h − 3n' = 2 × 3 + 0 − 3× 2 = 0
p' = 2p'l + p'h − 3n' = 2 ×10 + 0 − 3×6 = 2
F = 3n − (2pl + ph − p') − F' = 3 × 11 − (2 × 17 + 0 − 2) − 0 =1
P24
B P23
3
2A
P12
1
4
D
P14
vE
=
vB
P13 E P13B
《机械原理》课后习题附答案
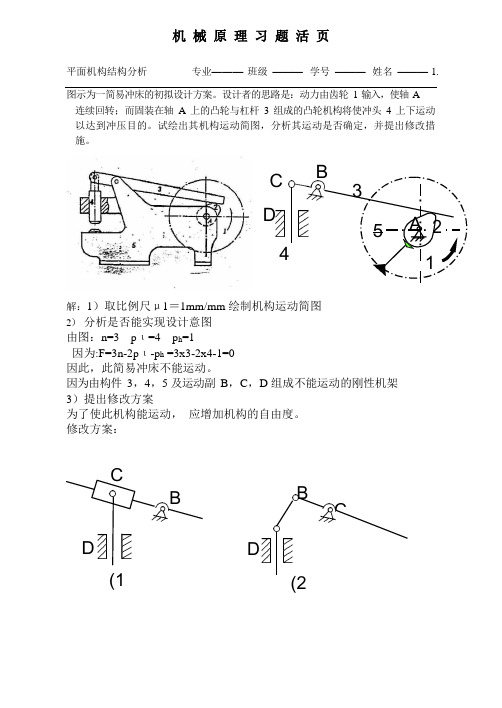
CB D BC平面机构结构分析专业———班级———学号———姓名——— 1.图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1 输入,使轴A连续回转;而固装在轴A 上的凸轮与杠杆3 组成的凸轮机构将使冲头4 上下运动以达到冲压目的。
试绘出其机构运动简图,分析其运动是否确定,并提出修改措施。
C B 35 A 24 1解:1)取比例尺μ1=1mm/mm 绘制机构运动简图2)分析是否能实现设计意图由图:n=3 pι=4 p h=1因为:F=3n-2pι-p h =3x3-2x4-1=0因此,此简易冲床不能运动。
因为由构件3,4,5 及运动副B,C,D 组成不能运动的刚性机架3)提出修改方案为了使此机构能运动,应增加机构的自由度。
修改方案:D(1 (2DG7D 64C EF9 38B 2 A122如图所示为一小型压力机。
图中齿轮 1与偏心轮 1’为同一构件,绕固定轴心 o 连续转动。
在齿轮 5上开有凸轮凹槽,摆杆 4上的滚子 6嵌在凹槽中,从而使摆杆 4 绕 C 轴上下摆动。
同时,又通过偏心轮 1’、连杆 2、滑杆 3使 C 轴上下移动。
最后通过在摆杆 4的叉槽中的滑块 7和铰链 G 使冲头 8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
b)解:计算该机构的自由度n=7, p ι=9, p h =2 F=3n-2p e -p h =3x7-2x8-2=13. 试计算下列二图所示齿轮连杆组合机构的自由度。
图中相切的圆周表示一对齿轮传动的节圆;凡局部自由度、复合铰链和虚约束均需明确指出。
解:a )解n=4 P ι=5 Ph=1F=3x4-2x5-1=134 C A复合铰链1a)BD 5b)解:n=6 Pι=7 Ph=3F=3×6-2×7-3=14.试计算下列二图所示压榨机的自由度。
图a 中,左右两半完全对称;图b 中,CD = FI = KL = KM = FJ = CE,LI =KF = MJ = JE = FC = ID。
机械原理课后习题答案(朱理)
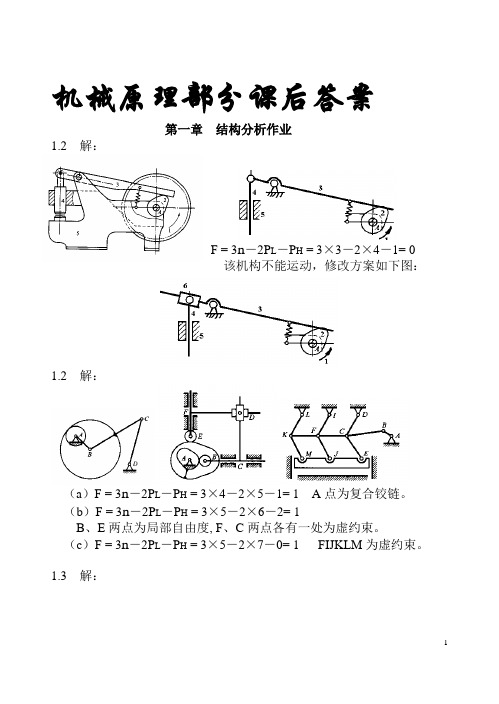
机械原理部分课后答案第一章结构分析作业1.2 解:F = 3n-2P L-P H = 3×3-2×4-1= 0该机构不能运动,修改方案如下图:1.2 解:(a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。
(b)F = 3n-2P L-P H = 3×5-2×6-2= 1B、E两点为局部自由度, F、C两点各有一处为虚约束。
(c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。
1.3 解:F = 3n-2P L-P H = 3×7-2×10-0= 11)以构件2为原动件,则结构由8-7、6-5、4-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图a)。
2)以构件4为原动件,则结构由8-7、6-5、2-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图b)。
3)以构件8为原动件,则结构由2-3-4-5一个Ⅲ级杆组和6-7一个Ⅱ级杆组组成,故机构为Ⅲ级机构(图c)。
(a) (b) (c)第二章 运动分析作业2.1 解:机构的瞬心如图所示。
2.2 解:取mmmm l /5=μ作机构位置图如下图所示。
1.求D 点的速度V D13P D V V =而 25241314==P P AE V V E D ,所以 s mm V V E D /14425241502524=⨯==2. 求ω1s rad l V AE E /25.11201501===ω3. 求ω2因 98382412141212==P P P P ωω ,所以s rad /46.0983825.1983812=⨯==ωω 4. 求C 点的速度V Csmm C P V l C /2.10154446.0242=⨯⨯=⨯⨯=μω2.3 解:取mmmm l /1=μ作机构位置图如下图a 所示。
1. 求B 2点的速度V B2V B2 =ω1×L AB =10×30= 300 mm/s 2.求B 3点的速度V B3V B3 = V B2 + V B3B2大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC 取mm s mm v /10=μ作速度多边形如下图b 所示,由图量得:mmpb 223= ,所以smm pb V v B /270102733=⨯=⨯=μ由图a 量得:BC=123 mm , 则mmBC l l BC 1231123=⨯=⨯=μ3. 求D 点和E 点的速度V D 、V E利用速度影像在速度多边形,过p 点作⊥CE ,过b 3点作⊥BE ,得到e 点;过e 点作⊥pb 3,得到d 点 , 由图量得:mmpd 15=,mmpe 17=,所以smm pd V v D /1501015=⨯=⨯=μ , smm pe V v E /1701017=⨯=⨯=μ;smm b b V v B B /17010173223=⨯=⨯=μ4. 求ω3s rad l V BC B /2.212327033===ω5. 求n B a 222212/30003010smm l a AB n B =⨯=⨯=ω6. 求3B aa B3 = a B3n + a B3t = a B2 + a B3B2k + a B3B2τ 大小 ω32L BC ω12L AB 2ω3V B3B2 ?方向 B →C ⊥BC B →A ⊥BC ∥BC 22233/5951232.2s mm l a BC n B =⨯=⨯=ω223323/11882702.222s mm V a B B k B B =⨯⨯=⨯=ω取mm s mm a 2/50=μ作速度多边形如上图c 所示,由图量得:mmb 23'3=π ,mmb n 20'33=,所以233/11505023's mm b a a B =⨯=⨯=μπ2333/10005020's mm b n a at B =⨯=⨯=μ7. 求3α233/13.81231000s rad l a BC tB ===α8. 求D 点和E 点的加速度a D 、a E利用加速度影像在加速度多边形,作e b 3'π∆∽CBE ∆, 即 BE eb CE e CB b 33''==ππ,得到e 点;过e 点作⊥3'b π,得到d 点 , 由图量得:mme 16=π,mmd 13=π,所以2/6505013s mm d a a D =⨯=⨯=μπ ,2/8005016s mm e a a E =⨯=⨯=μπ 。
机械原理课后答案
习题解答第一章绪论1-1 答:1 )机构是实现传递机械运动和动力的构件组合体。
如齿轮机构、连杆机构、凸轮机构、螺旋机构等。
2 )机器是在组成它的实物间进行确定的相对运动时,完成能量转换或做功的多件实物的组合体。
如电动机、内燃机、起重机、汽车等。
3 )机械是机器和机构的总称。
4 )a. 同一台机器可由一个或多个机构组成。
b. 同一个机构可以派生出多种性能、用途、外型完全不同的机器。
c. 机构可以独立存在并加以应用。
1-2 答:机构和机器,二者都是人为的实物组合体,各实物之间都具有确定的相对运动。
但后者可以实现能量的转换而前者不具备此作用。
1-3 答:1 )机构的分析:包括结构分析、运动分析、动力学分析。
2 )机构的综合:包括常用机构设计、传动系统设计。
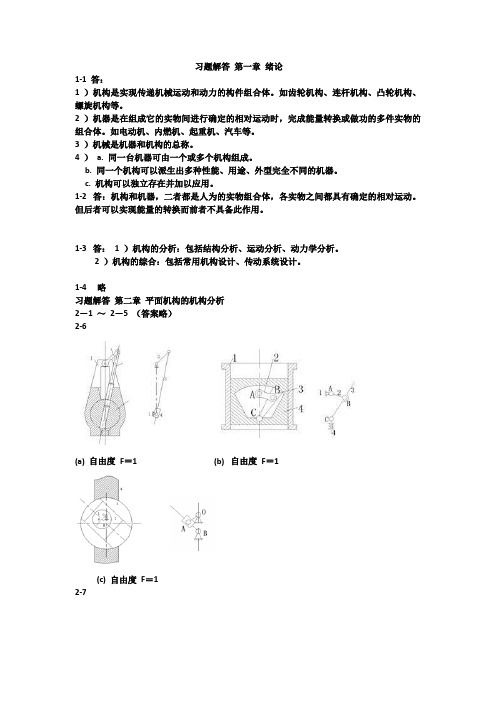
1-4 略习题解答第二章平面机构的机构分析2-1 ~2-5 (答案略)2-6(a) 自由度F=1 (b) 自由度F=1(c) 自由度F=12-7题2 -7 图F =3 × 7 -2 × 9 -2 =12 -8a) n =7 =10 =0 F =3×7-2×10 =1b) B 局部自由度n =3 =3 =2 F=3×3 -2×3-2=1c) B 、D 局部自由度n =3 =3 =2 F=3×3 -2×3-2 =1d) D( 或C) 处为虚约束n =3 =4 F=3×3 -2×4=1e) n =5 =7 F=3×5-2×7=1f) A 、B 、C 、E 复合铰链n =7 =10 F =3×7-2×10 =1g) A 处为复合铰链n =10 =14 F =3×10 -2×14=2h) B 局部自由度n =8 =11 =1 F =3×8-2×11-1 =1i) B 、J 虚约束C 处局部自由度n =6 =8 =1 F =3×6 -2×8-1=1j) BB' 处虚约束A 、C 、D 复合铰链n =7 =10 F =3×7-2×10=1 k) C 、D 处复合铰链n=5 =6 =2F =3×5-2×6-2 =1l) n =8 =11 F =3×8-2×11 =2m) B 局部自由度I 虚约束4 杆和DG 虚约束n =6 =8 =1 F =3×6-2×8-1 =12-9a) n =3 =4 =1 F =3 × 3 -2 × 8 -1 =0 不能动。
机械原理课后习题答案

第四章课后习题4—12图示为一曲柄滑块机构的三个位置,F为作用在活塞上的力转动副A及B上所画的小圆为摩擦圆,试决定在此三个位置时作用在连杆AB上的作用力的真实方向(构件重量及惯性力略去不计)。
解:上图中构件2受压力。
因在转动副A处2、1之间的夹角∠OAB在逐渐减小,故相对角速度ω21沿顺时针方向,又因2受压力,故FR12应切于摩擦圆的下方;在转动副B处,2、3之间的夹角∠OBA在逐渐增大,相对角速度ω23也沿顺时针方向,故FR32应切于摩擦圆的上方。
R32解:上图构件2依然受压力。
因在转动副A处2、1之间的夹角∠OAB逐渐减小,故相对角速度ω21沿顺时针方向,又因2受压力,故F R12应切于摩擦圆的下方;在转动副B处,2、3之间的夹角∠OBA逐渐减小,故相对角速度ω23沿逆时针方向,F R32应切于摩擦圆的下方。
解:上图构件2受拉力。
因在转动副A处2、1之间的夹角∠OAB在逐渐增大,故相对角速度ω21沿顺时针方向,又因2受拉力,故FR12应切于摩擦圆的上方;在转动副B处,2、3之间的夹角∠OBA逐渐减小,故相对角速度ω23沿顺时针方向,FR32应切于摩擦圆的下方。
4-13 图示为一摆动推杆盘形凸轮机构,凸轮1沿逆时针方向回转,F为作用在推杆2上的外载荷,试确定凸轮1及机架3作用给推杆2的总反力FR12及FR32方位(不考虑构件的重量及惯性力,解:经受力分析,FR12的方向如上图所示。
在FR12的作用下,2相对于3顺时针转动,故FR32应切于摩擦圆的左侧。
补充题1 如图所示,楔块机构中,已知γ=β=60°,Q =1000N 格接触面摩擦系数f =0.15,如Q 为有效阻力,试求所需的驱动力F 。
解:对机构进行受力分析,并作出力三角形如图。
对楔块1,R 21R310F F F ++=由正弦定理有21sin(602sin(90R F F ϕϕ+-=))o o ① 对楔块2,同理有R12R320Q F F ++=sin(90sin(602ϕϕ+-=))o o ②sin(602sin(602F Q ϕϕ+=⋅-))o o且有2112R R F F = ,8.53arctgf ϕ==o ③联立以上三式,求解得F =1430.65N2 如图示斜面机构,已知:f (滑块1、2与导槽3相互之间摩擦系数)、λ(滑块1的倾斜角)、Q (工作阻力,沿水平方向),设不计两滑块质量,试确定该机构等速运动时所需的铅重方向的驱动力F 。
机械原理课后习题答案
《机械原理》课后习题答案第2章(P27)2-2 计算下列机构的自由度,如遇有复合铰链、局部自由度、虚约束等加以说明。
(a)n=3,p l=3 F=3*3-2*3=3(b)n=3,p l=3,p h=2 F=3*3-2*3-2=1 (B处有局部自由度)(c)n=7,p l=10 F=3*7-2*10=1(d)n=4,p l=4,p h=2 F=3*4-2*4-2=2 (A处有复合铰链)(e)n=3,p l=4 F=3*3-2*4=1 (A或D处有虚约束)(f)n=3,p l=4 F=3*3-2*4=1 (构件4和转动副E、F引入虚约束)(g)n=3,p l=5 F=(3-1)*3-(2-1)*5=1 (有公共约束)(h)n=9,p l=12,p h=2 F=3*9-2*12-2=1 (M处有复合铰链,C处有局部自由度)2-3 计算下列机构的自由度,拆杆组并确定机构的级别。
(a)n=5,p l=7 F=3*5-2*7=1由于组成该机构的基本杆组的最高级别为Ⅱ级杆组,故此机构为Ⅱ级机构。
(b)n=5,p l=7 F=3*5-2*7=1此机构为Ⅱ级机构。
(c)n=5,p l=7 F=3*5-2*7=1拆分时只须将主动件拆下,其它构件组成一个Ⅲ级杆组,故此机构为Ⅲ级机构。
2-4 验算下列运动链的运动是否确定,并提出具有确定运动的修改方案。
(a)n=3,p l=4,p h=1 F=3*3-2*4-1=0 该运动链不能运动。
修改方案如下图所示:(b)n=4,p l=6 F=3*4-2*6=0 该运动链不能运动。
修改方案如下图所示:或第3章(P42)3-2 下列机构中,已知机构尺寸,求在图示位置时的所有瞬心。
(a)(b)(c)(a) v3=v P13=ω1P14P13μl3-6 在图示齿轮连杆机构中,三个圆互作纯滚,试利用相对瞬心P13来讨论轮1与轮3的传动比i13。
第5章(P80)5-2 一铰接四杆机构(2)机构的两极限位置如下图:(3)传动角最大和最小位置如下图:5-3题略解:若使其成为曲柄摇杆机构,则最短杆必为连架杆,即a 为最短杆。
机械原理课后全部习题解答
机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理课后习题答案部分)
第二章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-11 如图所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
解:1)取比例尺绘制机构运动简图。
2)分析其是否可实现设计意图。
F=3n-( 2P l +P h –p’ )-F’=3×3-(2×4+1-0)-0=0此简易冲床不能运动,无法实现设计意图。
3)修改方案。
为了使此机构运动,应增加一个自由度。
办法是:增加一个活动构件,一个低副。
修改方案很多,现提供两种。
※2-13图示为一新型偏心轮滑阎式真空泵。
其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。
《机械原理》第二版(刘会英 杨志强 张明勤 著)课后习题答案 机械工业出版社
D1D圆弧的中间. 5)曲柄应增长到 400mm. 2-6 答案:1)机构处在图示位置时,其机构的传动角γ如图所示.
γ=∠CBE
COSγ=BE/BC
即 COSγ=(γSinα+e)/L
……①
从上式可知,r↑,e↑均可使传动角γ↓;L↑使γ↑。
2)从上式可知,最小传动角出现在AB杆垂直于导路时.(即α=900时)
综上分析:AB 杆的取值为: 15<lAB<45 或者者 55<lAB<115
2-3 答案:由于lAB+lAD≤lBC+lCD,且以最短杆AB的邻边为机架。故该铰链四杆机构 为曲柄摇杆机构。AB为曲柄。
1)以曲柄AB为主动件,作业摇杆CD的极限位置如图所示。
∴AC1=lAB+lBC=80 AC2=lBC-lAB=24 极位夹角θ: θ=COS-1∠C2AD-COS-1∠C1AD =COS-1[(AC 2 2+AD2-C 2 D2)/2AC 2 *AD]-COS-1[(AC 1 2+AD2-C 1 D2)/
为机架,则只能最短杆即为 AD=30,则最长杆可能为 BC 杆,也可能是 AB 杆。
1)1) 若AB杆为最长杆:lAD+lAB≤lBC+lCD∴lAB≤55 即50<lAB≤55 2)2) 若BC杆为最长杆:lAD+lBC≤lAB+lCD∴lAB≥45 即45≤lAB<50 ∴若该机构为双曲柄机构,则AB杆杆长的取值范围为:45≤lAB≤55 3)3) 欲使该机构为双摇杆机构,则最短杆与最长杆之和应大于另外二杆之和。现在
以EF为原动件时:
由2个Ⅱ级基本杆组组成,机构级别为2级。 C)F=3×7-2×10=1 其中C点为复合铰链,分别由 2、3、4构件在C点构成 复合铰。以AB为原动件时:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)…第8章机械运动力学方程 (32)第9章平面机构的平衡 (39);第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
#4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
;8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()[7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
,解:a)平面高副b)空间低副c)平面高副2-8将图2-27中机构的结构图绘制成机构运动简图,标出原动件和机架,并计算其自由度。
解:b)n=3,L P =4 ,H P =0, F=3×3-2×4=1《P=4 ,P=0,F=3×3-2×4=1 c) n=3,L】2-9 试判断图2-28中所示各“机构”能否成为机构,并说明理由。
解:H ) 4 6 P 034260 L a n P F ====⨯-⨯=不是机构修改后的机构H ) 3 4 P 134260 L b n P F ====⨯-⨯=不是机构修改后的机构.H ) 2 3 P 032230 L c n P F ====⨯-⨯=不是机构修改后的机构H )10 14 P 0310214 2 L d n P F ====⨯-⨯=是机构2-10 计算图2-29中所示各机构的自由度,并指出其中是否含有复合铰链、局部自由度或虚约束,说明计算自由度应作何处理。
解: a)n=5,L P =7 , -有复合铰链:构件3和构件5; 构件3和构件1;F=3n-2L P =3×5-2×7=1 b) n=6, L P =8, PH=1, 有局部自由度,有虚约束F=3n-2L P -H P =3x6-2x8-1=1d) 有虚约束,有复合铰链n=5,P=7,H P=0,LF=3n-2P-H P=3×5-2×7-0=1Le) 有对称虚约束-n=5,P=7LF=3n-2P=1Lf)有对称虚约束n=3,P=3,H P=2LF=3n-2P-H P=1Lg) n=2,P=2,H P=1,n=3,L P=4 有虚约束Lh) 有对称虚约束,n=3,P=4L|F=3n-2P=3×3-2×4=1L或者:n=4,P=5 H P=1,LF=3n-2P-H P=3×4-2×5-1=1L2-12计算图2-30所示各机构的自由度,并在高副低代后,分析组成这些机构的基本杆组即杆组的级别。
解:a)[n=4, L P =5, H P =1F=3n-2L P -H P =1 所以此机构为III 级机构b) n=3, L P =3, H P =2F=3n-2L P -H P =1c) n=4,L P =4,H P =3F=3n-2L P -H P =1 d)·n=6, L P =8 ,H P =1F=3n-2L P -H P =1 所以此机构为III 级机构2-13 说明图2-32所示的各机构的组成原理,并判别机构的级别和所含杆组的数目。
对于图2-32f 所示机构,当分别以构件1、3、7作为原动件时,机构的级别会有什么变化a)|机构的级别:II|b)机构的级别:IIf)当分别以构件1、3、7作为原动件时以构件1作为原动件时,[以构件1作为原动件时,机构的级别II 以构件3作为原动件时,以构件3作为原动件时,机构的级别:II以构件7作为原动件时,杆组的级别:III以构件7作为原动件时,机构的级别:III】2-14 绘制图2-33所示机构高副低代后的运动简图,计算机构的自由度。
并确定机构所含杆组的数目和级别以及机构的级别。
图2-33 机构示意图|机构高副低代后的运动简图杆组的级别:III所以,机构的级别:III2-15 试分析图2-35所示刨床机构的组成,并判别机构的级别。
若以构件4为原动件,则此机构为几级解:F=3n-2L P -H P =3×5-2×7=1*一、若以构件1为原动件,则此机构拆分的杆组是:所以此机构为III 级二、若以构件4为原动件,则此机构拆分的杆组是:所以此机构为II级',第三章 平面连杆机构3-9图3-54所示平面铰链四杆运动链中,已知各构件长度分别为55AB l mm =,40BC l mm =, 50CD l mm =,25AD l mm =。
(1)判断该机构运动链中四个转动副的类型。
(2)取哪个构件为机架可得到曲柄摇杆机构。
(3)取哪个构件为机架可得到双曲柄机构。
(4)取哪个构件为机架可得到双摇杆机构,解:平面连杆机构L=55 L=40 L=50 L=25 L AB +L AD <L BC +L CD(1) A 、D 整转副 B 、C 摆转副(2)AB 或CD 为机架时,为曲柄摇杆机构 (3)AD 为机架时,为双曲柄机构 (4)BC 为机架时,为双摇杆机构-3-10 图3-57所示为一偏置曲柄滑块机构,试求杆AB 为曲柄的条件。
若偏距e =0,则杆AB 为曲柄的条件又如何解:主要分析能否通过极限位置,a+e<b3-11在图3-81所示的铰链四杆机构中,各杆件长度分别为25AB l mm =,40BC l mm =,50CD l mm =,55AD l mm =。
(1)若取AD 为机架,求该机构的极位夹角θ,杆CD 的最大摆角ϕ和最小传动角0min γ(2)若取AB 为机架,求该机构将演化为何种类型的机构为什么请说明这时C 、D 两个转动副是周转副还是摆转副。
^图3-58 铰链四杆机构解:由于25+55<40+50,所以l AB +l AD ≤l BC +l CD ,且以最短杆AB的邻边为机架。
故该铰链四杆机构为曲柄摇杆机构。
AB为曲柄。
1)以曲柄AB为主动件,作出摇杆CD的极限位置如图所示。
∴ AC 1=l AB +l BC =40+25=65AC 2=l BC -l AB =40-25=15(1)极位夹角θ:出现在AB 与连杆BC 重合位置!222222112212arccos arccos 22AC AD C D AC AD C D AC AD AC ADθ+-+-=-⨯⨯⨯⨯222222655550155550arccos arccos265552155514.6+-+-=-⨯⨯⨯⨯=图1行程速比系数K=(1800+θ)/(1800-θ)≈(2)求摇杆的最大摆角φ,从图1,摇杆的最大摆角φ: φ=∠B 1DC 1-∠B 2DC 2 -222222112212222222arccos arccos22505565505515250552505560.83C D AD AC C D AD AC AD C D AD C D +-+-=-⨯⨯⨯⨯+-+-=-⨯⨯⨯⨯=(3)最小传动角γmin 出现在AB与机架AD重合位置(分正向重合、反向重合)如图2。
分别求出1δ、2δ,再求最小传动角。
2221()arccos 2BC CD AD AB BC CDδ+--=⨯⨯2224050(5525)arccos2405036.86+--=⨯⨯= 2222()arccos 2BC CD AD AB BC CDδ+-+=⨯⨯2224050(5525)arccos 24050125.09+-+=⨯⨯=】图2曲柄处于AB1位置时,传动角γ1=1δ=.曲柄处于AB2位置时,传动角γ2=1800-2δ=.现比较的γ1、γ2大小,最小传动角取γ1、γ2中最小者.∴γmin=2)取AB为机架,即取最短杆为机架,该机构演化为双曲柄机构。
因为在曲柄摇杆机构中取最短杆作为机架,其2个连架杆与机架相连的运动副A、B均为周转副。
C、D两个转动副为摆转副。
,3-15图3-59所示为加热炉炉门的启闭状态,试设计一机构,使炉门能占有图示的两个位置。
图3-59 题3-15图提示:把门看着是在连杆上,即两个活动铰链中心在门上,同时把固定铰链中心装在炉子的外壁上。
3-16试设计一个如图3-60所示的平面铰链四杆机构。
设已知其摇杆0B B 的长度075B B l mm =,行程速比系数K=,机架00A B 的长度00100A B l mm =,又知摇杆的一个极限位置与机架间的夹角45ϕ=,试求其曲柄的长度0A A l 和连杆的长度AB l 。
图3-60 题3-16图}解:(符号与课本不太一致)当行程速比系数K=时,机构的极位夹角为︒=+-︒=+-︒=3615.115.118011180K K θ即机构具有急回特性,过固定铰链点A作一条与已知直线1AC 成︒36的直线再与活动铰链点C的轨迹圆相交,交点就是活动铰链点C的另一个极限位置。
选定比例尺,作图,如下图所示。
由图可知,有两个交点,即有两组解。
直接由图中量取84.701=AC ,75.252=AC ,88.1692='AC 。
故有两组解。
解一:︒451C DAψ'θψ'2C 2C 2B 1B '2B'1B )(b构件AB 的长为mm AC AC l AB 55.22275.2584.70221=-=-=构件BC 的长为mm AC AC l BC 3.48275.2584.70221=+=+= 摇杆的摆角︒=41ψ$解二:构件AB 的长为mm AC AC l AB52.49284.7088.169212=-=-'=构件BC 的长为mm AC AC l BC36.120284.7088.169212=+=+'=摇杆的摆角︒='107ψ3-17 如图3-61所示,设已知破碎机的行程速比系数K =,颚板长度300CD l =mm ,颚板摆角ϕ=35º,曲柄长度l AB =80 mm 。