LXH-GJ17L3驱动板
PWMLED驱动控制器PT4107中文资料

PWM LED驱动控制器PT4107中文资料LED日光灯的LED灯条电源驱动方案有很多种,目前非隔离方案因其效率高而占主流,而用PWM LED驱动控制器来做LED日光灯驱动电源的又占绝大多数。
PT4107是一个典型的PWM LED驱动控制器,其内部拓扑结构如图1。
PT4107是一款高压降压式PWM LED驱动控制器,通过外部电阻和内部的齐纳二极管,可以将经过整流的110V或220V交流电压箝位于20V。
当Vin上的电压超过欠压闭锁阈值18V后,芯片开始工作,按照峰值电流控制的模式来驱动外部的MOSFET。
在外部MOSFET 的源端和地之间接有电流采样电阻,该电阻上的电压直接传递到PT4107芯片的CS端。
当CS端电压超过内部的电流采样阈值电压后,GATE端的驱动信号终止,外部MOSFET关断。
阈值电压可以由内部设定,或者通过在LD端施加电压来控制。
如果要求软启动,可以在LD端并联电容,以得到需要的电压上升速度,并和LED电流上升速度相一致。
PT4107的主要技术特点:从18V到450V的宽电压输入范围,恒流输出;采用频率抖动减少电磁干扰,利用随机源来调制振荡频率,这样可以扩展音频能量谱,扩展后的能量谱可以有效减小带内电磁干扰,降低系统级设计难度;可用线性及PWM调光,支持上百个0.06W LED 的驱动应用,工作频率25kHz-300kHz,可通过外部电阻来设定。
PT4107封装如图2,各引脚功能如下:1.GND 芯片接地端;2.CS LED峰值电流采样输入端;3.LD 线性调光接入端;4.RI 振荡电阻接入端;5.ROTP 过温保护设定端;6.PWMD PWM调光兼使能输入端,芯片内部有100K上拉电阻;7.VIN 芯片电源端;8.GATE 驱动外挂MOSFET栅极;设计全电压20W日光灯开关恒流源以AC 85V~245V全电压输入为例,采用PT4107 PWM LED驱动控制器来做LED日光灯驱动电源的主芯片,设计一个比较理想的应用电路方案(图3)。
直线驱动器DFPI系列产品说明书

1EX 标记
2适用文件
3认证的产品
4安全
4.1安全注意事项
–本装置在规定的运行条件下可应用于爆炸性气体环境 1 区和 2 区以及爆炸
性粉尘环境 21 区和 22 区。
–本设备只允许使用至少符合 ISO8573-1:2010 [7:4:4] 质量等级的压缩空气
运行。
工作介质注意事项:不允许用润滑介质工作。
–本产品不能用于其它流体。
–在有爆炸危险的区域外吸入工作介质。
–该设备只能以交付的配置在爆危环境中使用。
–请在原装状态下使用本装置,切勿擅自进行任何改动。
–关于产品的一切工作仅允许由具备资质的专业人员进行,这些专业人员对工
作进行评估并识别出危险。
–只能在潜在爆炸性区域以外执行所有作业。
–避免侧向力和力矩作用在活塞杆上。
4.2按规定使用
按规定,直行程驱动器 DFPI 用于控制过程技术设备。
它特别适合用于恶劣环
境下的气动定位。
4.3标记 X:特殊条件
–静电放电可造成危险。
5功能
通过对气腔加压,使活塞在硬管中往复运动。
活塞杆将运动传输到外部。
集成
式位移编码器将当前活塞位置以模拟量电压信号的形式传送至上级系统。
6调试
7维护
–如按规定使用,则本装置免维护。
8技术参数。
联想GJ17L3液晶显示器通病
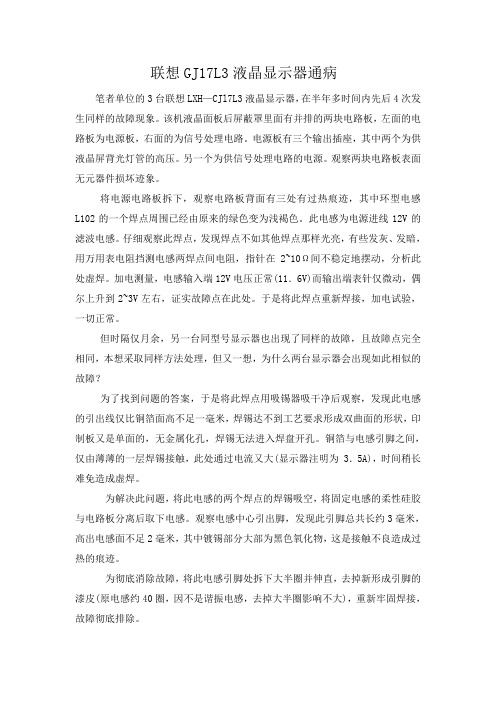
联想GJ17L3液晶显示器通病笔者单位的3台联想LXH—CJl7L3液晶显示器,在半年多时间内先后4次发生同样的故障现象。
该机液晶面板后屏蔽罩里面有并排的两块电路板,左面的电路板为电源板,右面的为信号处理电路。
电源板有三个输出插座,其中两个为供液晶屏背光灯管的高压。
另一个为供信号处理电路的电源。
观察两块电路板表面无元器件损坏迹象。
将电源电路板拆下,观察电路板背面有三处有过热痕迹,其中环型电感L102的一个焊点周围已经由原来的绿色变为浅褐色。
此电感为电源进线12V的滤波电感。
仔细观察此焊点,发现焊点不如其他焊点那样光亮,有些发灰、发暗,用万用表电阻挡测电感两焊点间电阻,指针在2~10Ω间不稳定地摆动,分析此处虚焊。
加电测量,电感输入端12V电压正常(11.6V)而输出端表针仅微动,偶尔上升到2~3V左右,证实故障点在此处。
于是将此焊点重新焊接,加电试验,一切正常。
但时隔仅月余,另一台同型号显示器也出现了同样的故障,且故障点完全相同,本想采取同样方法处理,但又一想,为什么两台显示器会出现如此相似的故障?为了找到问题的答案,于是将此焊点用吸锡器吸干净后观察,发现此电感的引出线仅比铜箔面高不足一毫米,焊锡达不到工艺要求形成双曲面的形状,印制板又是单面的,无金属化孔,焊锡无法进入焊盘开孔。
铜箔与电感引脚之间,仅由薄薄的一层焊锡接触,此处通过电流又大(显示器注明为 3.5A),时间稍长难免造成虚焊。
为解决此问题,将此电感的两个焊点的焊锡吸空,将固定电感的柔性硅胶与电路板分离后取下电感。
观察电感中心引出脚,发现此引脚总共长约3毫米,高出电感面不足2毫米,其中镀锡部分大部为黑色氧化物,这是接触不良造成过热的痕迹。
为彻底消除故障,将此电感引脚处拆下大半圈并伸直,去掉新形成引脚的漆皮(原电感约40圈,因不是谐振电感,去掉大半圈影响不大),重新牢固焊接,故障彻底排除。
和利时电机SYNTRON森创产品说明书

版权申明SYNTRON森创®是北京和利时电机公司(以下简称和利时电机)于2005年推出的产品品牌。
这个品牌浓缩了公司的核心技术和影响力,是公司始终注重自主创新,保持技术优势的体现。
说明书的内容参照了相关法律基准和行业基准。
如对本说明书提供的内容有疑问,请向销售人员咨询,致电客服热线,联系官网客服或致信本公司。
和利时电机保留在不事先通知的情况下,修改本手册中的产品和产品规格参数等权力。
手册请联系销售人员,或在和利时电机的官方网站下载相关手册。
和利时电机具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
和利时电机具有本使用说明书的著作权,未经许可,不得修改、复制使用说明书的全部或部分内容。
安全有关的符号说明本说明书中与安全有关的内容,使用了下述符号。
标注了安全符号的都为重要内容,请安全注意事项安全注意事项目录 第一章产品概况 ................................................... - 1 -1.1产品概况 ................................................................................................................................ - 1 -1.1.1简介 ........................................................................................................................... - 1 -1.1.2低压伺服驱动器型号命名 ....................................................................................... - 3 -1.1.3低压伺服一体机型号命名 ....................................................................................... - 3 -1.1.4规格和性能 ............................................................................................................... - 4 -1.1.5电机配套 ................................................................................................................... - 4 -1.1.6产品构造 ................................................................................................................... - 5 -1.1.7安装尺寸 ................................................................................................................... - 5 - 第二章准备 ...................................................... - 12 -2.1通讯协议及软件 .................................................................................................................. - 12 -2.2操作面板 .............................................................................................................................. - 13 -2.2.1操作面板介绍 .........................................................................................................- 13 -2.2.2指示灯介绍 .............................................................................................................- 13 -2.2.3数码管 .....................................................................................................................- 13 -2.2.4按键 .........................................................................................................................- 14 -2.2.5键盘操作流程 .........................................................................................................- 15 - 第三章配线 ...................................................... - 16 -3.1接线总图 .............................................................................................................................. - 16 -3.2接线定义 .............................................................................................................................. - 17 -3.2.1 LS-10520M2系列接线定义 ..................................................................................- 17 -3.2.2 LS-10530BA系列接线定义 ..................................................................................- 18 -3.2.3 LS-10530BK系列接线定义 ..................................................................................- 19 -3.2.4 LS-10530D5系列接线定义...................................................................................- 20 -3.2.5 LS-10540D/LS-10550D系列接线定义................................................................- 21 -3.2.6 LS-20530DG系列接线定义..................................................................................- 22 -3.2.7 LS-20520E系列接线定义 .....................................................................................- 23 -3.2.8 LS-20530E / LS-20535E系列接线定义..............................................................- 25 -3.2.9 LS-20540E系列接线定义 .....................................................................................- 27 -3.2.10 DM一体机系列接线(驱动器后置一体机).....................................................- 29 -3.2.11 SM一体机系列接线(驱动器侧背一体机) .....................................................- 29 -3.2.11.1类型1 ....................................................................................................................- 29 -3.2.11.2类型2 ....................................................................................................................- 32 -3.3其他接线说明 ...................................................................................................................... - 33 -3.3.1 地线连接..................................................................................................................- 33 -目录3.3.2 编码器差分输出接线 ..............................................................................................- 33 -3.3.3 数字输入接线 ..........................................................................................................- 33 -3.3.4 数字输出接线 ..........................................................................................................- 33 -3.3.5 手动控制制动器接线 ..............................................................................................- 34 -3.3.6 位置模式接线 ..........................................................................................................- 34 -3.3.7 内部速度模式接线 ..................................................................................................- 35 -3.3.8 外部速度/转矩模式接线图 .....................................................................................- 35 - 第四章设定 ...................................................... - 36 -4.1电机方向 .............................................................................................................................. - 36 -4.2状态参数 .............................................................................................................................. - 36 -4.3功能参数 .............................................................................................................................. - 37 -4.3.1工作控制模式 .........................................................................................................- 37 -4.3.2系统基本参数控制 .................................................................................................- 37 -4.3.3数字输入端口 .........................................................................................................- 38 -4.3.4内部控制信号 .........................................................................................................- 38 -4.3.5数字输出端口 .........................................................................................................- 41 -4.3.6脉冲端口输入输出 .................................................................................................- 41 -4.3.7目标到达状态判断 .................................................................................................- 42 -4.3.8位置环控制参数 .....................................................................................................- 43 -4.3.9模拟量输入参数 .....................................................................................................- 44 -4.3.10内部速度参数 .........................................................................................................- 45 -4.3.11速度环调节参数 .....................................................................................................- 45 -4.3.12转矩电流指令滤波参数 .........................................................................................- 45 -4.3.13控制限制参数 .........................................................................................................- 46 -4.3.14增益切换 .................................................................................................................- 47 -4.3.15速度模式加减速时间 .............................................................................................- 48 -4.3.16电磁制动器 .............................................................................................................- 48 -4.3.17报警保护配置 .........................................................................................................- 48 -4.3.18通讯参数设置 .........................................................................................................- 50 -4.3.19电流环控制参数 .....................................................................................................- 51 -4.3.20泄放参数配置 .........................................................................................................- 51 -4.3.21历史报警码 .............................................................................................................- 52 -4.4试运行 .................................................................................................................................. - 52 -4.4.1基本流程 .................................................................................................................- 52 -4.4.2JOG模式空载试运行(键盘面板上操作) ........................................................- 54 -4.4.3速度模式空载试运行(总线通讯操作) .............................................................- 54 -目录 第五章调整 ...................................................... - 55 -5.1控制模式的选择 .................................................................................................................. - 55 -5.2输入输出的配置 .................................................................................................................. - 56 -5.2.1输入信号端口分配 .................................................................................................- 56 -5.2.2输出信号端口分配 .................................................................................................- 57 -5.3基本参数 .............................................................................................................................. - 58 -5.3.1伺服使能 .................................................................................................................- 58 -5.3.2急停 .........................................................................................................................- 58 -5.3.3指令取反 .................................................................................................................- 58 -5.3.4零速到达 .................................................................................................................- 59 -5.3.5目标速度到达 .........................................................................................................- 59 -5.3.6速度一致 .................................................................................................................- 59 -5.3.7目标转矩到达 .........................................................................................................- 59 -5.3.8超程 .........................................................................................................................- 60 -5.3.9恢复出厂默认参数 .................................................................................................- 60 -5.4位置模式调整 ...................................................................................................................... - 61 -5.4.1脉冲指令方式的选择 .............................................................................................- 61 -5.4.2脉冲指令窗口滤波器 .............................................................................................- 61 -5.4.3脉冲指令平滑滤波器 .............................................................................................- 62 -5.4.4指令脉冲禁止功能 .................................................................................................- 62 -5.4.5电子齿轮的设定 .....................................................................................................- 62 -5.4.6位置到达信号 .........................................................................................................- 65 -5.4.7位置接近信号 .........................................................................................................- 65 -5.4.8位置超差警告 .........................................................................................................- 66 -5.4.9位置脉冲误差清零 .................................................................................................- 66 -5.5速度模式调整 ...................................................................................................................... - 66 -5.5.1外部模拟量速度模式运行 .....................................................................................- 66 -5.5.2内部速度模式运行 .................................................................................................- 67 -5.5.3加减速时间 .............................................................................................................- 68 -5.5.4零速给定 .................................................................................................................- 69 -5.6转矩模式调整 ...................................................................................................................... - 69 -5.6.1转矩指令增益的调整 .............................................................................................- 69 -5.6.2转矩指令偏移量的调整 .........................................................................................- 69 -5.6.3转矩指令方向的设置 .............................................................................................- 69 -5.6.4转矩指令低通滤波器 .............................................................................................- 69 -5.6.5模拟转矩指令零值箝位 .........................................................................................- 70 -目录5.6.6转矩控制时的速度限制 .........................................................................................- 70 -5.7共振抑制 .............................................................................................................................. - 71 -5.8转矩限制 .............................................................................................................................. - 72 -5.9增益切换 .............................................................................................................................. - 73 -5.10增益调整 .............................................................................................................................. - 75 -5.10.1速度环增益调整 .....................................................................................................- 75 -5.10.2位置环增益调整 .....................................................................................................- 75 -5.10.3增益调整注意事项 .................................................................................................- 75 -5.11电磁制动 .............................................................................................................................. - 76 -5.12编码器的输出 ...................................................................................................................... - 77 -5.13干扰对策 .............................................................................................................................. - 77 -第六章通讯 ...................................................... - 79 -6.1Modbus总线设置 ................................................................................................................ - 79 -6.2CAN总线设置..................................................................................................................... - 79 -6.3通讯协议 .............................................................................................................................. - 79 -第七章故障警告及处理 ............................................ - 80 -7.1报警代码 .............................................................................................................................. - 80 -7.2报警状态指示灯 .................................................................................................................. - 83 -7.3性能异常及解决办法 .......................................................................................................... - 83 -第八章维护与保养 ................................................ - 84 -8.1伺服电机的检查 .................................................................................................................. - 84 -8.2伺服驱动器的检查 .............................................................................................................. - 84 -产品概况第一章产品概况1.1 产品概况1.1.1 简介LS系列低压伺服驱动器(以下简称LS驱动器),是和利时电机根据市场需求推出的新一代高性能、高可靠产品。
盛群推出HT7L4091降压型LED照明驱动控制IC
架构所 能提供 的侦 错信息 。由于能够 在交易级 中具 体看 到 t tec 正 在测 试 的设 计 之 间 更 丰 富的 e bnh与 s 数据 ,ed 用 户能 够更 完整 地观 察整 个验 证 环境 , V ri
这在 复杂 的 回归 测试 阶段 ( ersi et 尤其 重 R g s nT s) e o
, '’ ■ r— —— —— ——— —— —— —— —— ——— —— —— —— ——— —— —— —— ——— — ——— —— —— 一
一
一 一
I
L C国et i 巾a gd路 ● hIr电c _ in成 u 集 er nt Ci a t
片 (o 测试 的侦错工作 。 SC)
上 海先进 从 2 0 0 9年至 今连续 5次通 过 欧洲 顶
级 汽 车 O M 制 造 厂 商 以 及 其 他 汽 车 制 造 商 的 E
V A . 车工 业过程 审核 , 为中 国大 陆第一家 具 D 6 3汽 成
备 “ ”级供应 商 资质 的半导 体 圆片制造 企业 , A 同时
还是 国 内 日前 唯一 一家具 备 为国际汽车 电子芯 片市
L MX 2 10U器件 ,并增 加 了对所 有超 高 I C O — 20 / O数
此外 , 种片上 F A 这 R M还持 超过 10万亿次 的写入 0 次数 、 为 开发 人 员提 供 了一 个全 新 的灵 活 度 ( 并 允 许 其通过 软件变更 来完成数 据 内存 与程序 内存 的分
区 ) 。
今 累计生产 汽车 电子 圆片逾 6, 0片 。 00 0
盛 群 推 出 H 7 4 9 T L0 1
降 压型 L D照 明驱 动控 制 I E C
欧瑞传动注塑机伺服系统说明书

本产品的安全运行取决于正确的安装和操作以及运输与保养维护,请务必遵守本手册中使用的如下安全标识: 错误的操作将引发危险情况,导致人身伤亡。
错误的操作将引发危险情况,导致轻度或中度人身伤害,损坏设备。 另外,该标识中所述事项有时也可能造成严重的后果。 驱动器及电机上标识符的意义如下: 电压高,有电击危险。
4 电气连接........................................................................................................................................ 20
2
4.1 电液系统构成.................................................................................................................... 20 4.2 电气连接 ........................................................................................................................... 21 4.2.1 主电路接线示意............................................................................................................ 22 4.2.2 控制端子功能简介和接线示意图 ................................................................................ 23 4.2.3 拨码开关介绍................................................................................................................ 24
直线驱动器 DFPI-ND2P-C1V 操作指南说明书
直线驱动器DFPI-...-...-ND2P-C1V-...-A(zh)操作指南80291841309a [8029190]原版:de直线驱动器DFPI-...-...-ND2P-C1V-...-A 中文.. (1)DFPI-100-...的工作部件和接口示例1接近开关的安装槽2安装螺纹(背面, Fig.4)3配备联轴器安装螺纹和反向固定扳手接触面的活塞杆4无接头盒图示5气动接口*)-通道R(排气)6节流螺丝D27气动接口*)-通道P(气源)8接头盒后部的电气接口9接地端口;位置取决于活塞直径aJ 压力平衡件aA 节流螺丝D4aB 选配:配备防护套管的连接电缆(附件)aC 接头盒-这里DFPI-...-...-ND2P-C1V-P-AaD 插头螺丝(出厂时)或过滤器气嘴以及消声器(附件)aE接头盒-这里DFPI-...-...-ND2P-C1V-A *)气动接口 Fig.11Fig.12结构DFPI-...-...-ND2P-C1V-…-A 电-气结合直线驱动器由以下部件组成:–双作用气缸–确定实际位置的内置行程测量系统(电位计)–具有用于控制活塞杆的方向控制阀的内置阀块–控制位置的内置位置控制器。
必要时可以将多个接近开关装入现有安装槽( Fig.11)内,以便对多个位置进行双重检测。
压力平衡件( Fig.1aJ )用于防止当温度发生波动时在壳体内部形成冷凝水,并以此保护内部电子设备。
对于DFPI-...-...-ND2P-C1V-A,气动接口应便于接近使用(气动接口G ¼)。
电气接口采用接头盒进行保护。
对于DFPI-...-...-ND2P-C1V-P-A,电气和气动接口采用坚固的接头盒进行保护,避免外部机械碰撞。
接头盒提供气动部件的插拔式接口和用于现场排气的排气接口G ¼。
本产品具有不同的规格。
本操作指南针对以下产品派生型进行说明:特征型号代码说明型号DFPI-用于过程自动化且带集成位移测量系统的双作用气动驱动器驱动器尺寸100-,125-,160-,200-,250-,320-可选不同等级的活塞直径;说明以[mm]为单位行程...-行程长度在40至990范围内可任意选择;(40...990)说明以[mm]为单位缓冲器N 无缓冲器位移测量系统D2模拟位移测量系统测量方法P-电位器调节装置C1调节器1方向控制阀V-内置接口设计无说明无保护气动接口P 受保护气动接口反馈A 模拟反馈信号实际值安全位置无说明活塞杆伸出Fig.2型号代码(例如:DFPI-100-200-ND2P-C1V-P-A)根据活塞的直径,直线驱动器的下列特征可能与Fig.1所展示的情况有所差异:–接地端口的位置( 产品上的标识)–气缸缸筒的外形–接头盒的外形此外,活塞直径≥200mm 的直线驱动器,通过平行于气缸缸筒,未经保护的管道单侧导入压缩空气。
API617-4-2002-膨胀机CN
4-2
API 617-2002 第四篇
注 2:由于这些件是永久性接合,截留的工艺过程气体不是什么问题。
2.5.3.2 轴上所有焊缝应该用超声波或射线照相检验方法检查。精加工之后,焊缝应该用磁粉或液体 渗透剂检验方法检查。关于材料检查方法,参观本标准第 1 篇的 4.2.2.1 节,关于验收标准,参见本标 准第 1 篇的 4.2.2.1.1 节。 2.5.3.3 对于最大轴颈速度(跳闸速度)在 95m/s(315 英尺/秒)以上的沉淀硬化的不锈钢轴,卖方应在轴 颈上提供涂层或者覆盖层,防止金属丝起绒。
注:可变进口导叶用于流量和压力控制。为了平滑有过程运行,管咀的精确控制是必要的。
2.4.4 进口导叶和执行机构应能在所有流量条件下以最大进口压力闭合。
注:在出口上限制流量的条件下,为控制膨胀机出口压力,常常要求可调管咀。在最小漏泄下快速关闭对于管咀是十分必要的,但是,进
口导叶不是紧密的截流装置。
2.4.5 进口导叶可以涂层以减小磨擦。 2.4.6 为进口导叶用于有毒、易燃或易爆炸性的工艺过程气体时,穿过机壳或外壳的联动装置,应加 以密封。 2.4.7 当要求时,应在冷膨胀机过程流体和轴承腔体之间提供一绝招的屏蔽。热屏蔽应由具有良好绝 招性能的材料制作。关于典型热屏蔽材料,请见本标准的附录 1D。 2.5 转动元件
a. 在不可焊接材料上,例如铸铁。 b. 为了维护(拆卸和组装)必要之处。 这些螺纹连接的开口应按照第 1 篇中 2.3.2.3.5 节中的规定。 2.3.3 压力机壳支承结构
注 1:膨胀机—压缩机没有任何联轴器,因此,对于机壳支承结构没有任何特殊要求。膨胀机压缩机一般要安装得该膨胀机在中心线支承
2009年度浙江省科学技术奖申报项目
58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117
胸腰段脊柱骨折前路减压与内固定术的技术改 抗水树电缆绝缘材料 节能灯48工位全自动圆排机 乘用车座椅滑轨总成和调角器总成研究与应用 万向智能器产业化项目 扁形名茶(龙井茶)炒制机 无线通信多制式合路系统研制 小型超小型控制继电器的研发与产业化项目 DLP一体化双引擎80英寸玻璃屏拼接显示系统 宽带流媒体平台 节能、环保型尿素生产技术研究及其推广应用 下颈椎经关节螺钉的应用解剖学及其钉棒系统 频率控制高精度微细加工技术的研究及其在批 GN8320ZC4B/5B型船用柴油机的研发与产业化 LYJ-100垂直式垃圾压缩机 模块化减速电机的研发与产业化 轨道交通用速度传感器系列产品研发与产业化 汽车电机专用N42UH烧结钕铁硼永磁材料研发 邻甲苯胺高压甲基化制2,4,6-三甲基苯胺 乙烯裂解炉对流段模块 双面绒带织造技术研究与开发 盐酸吉西他滨原料药 伺服节能塑料注射成型工艺装备研发及大规模 年糕新型保鲜技术开发研究 专利型多防功能枪柜研制及产业化 高等级大长度110kV光电复合海底电缆关键技 Z型高效节能汽车散热风扇 天然气发动机控制单元 核电站用耐辐照1E级电缆关键技术研发与产业 广州本田奥德赛(ODYS)车门框 重型密集藏品架关键技术的研究和产业化 LR03大功率无汞碱性锌锰电池和柔性生产线的 直读式远传水表及自动抄表系统 登革热流行特征与综合防制对策的研究 宁波地区质粒Amp C 酶在临床常见致病菌中的 浙东地区冠心病人群易感基因多态性研究 基于生物活性的红藻糖新产品研发 光电功能材料的溶胶-凝胶法合成、结构、性 显微视频图像处理与压缩关键技术创新及应用 波导型无源光子器件的理论设计与实验制备研 非光滑区域上奇异偏微分方程的实调和分析技 恶性肿瘤血清标志物的微体积快速诊断芯片研 血吸虫的免疫原性及抗血吸虫药物体外作用研 宁波渔业锚地避风能力评价研究 浙东沿海观赏植物多样性的构建与生态应用研 数源集成音控系统关键技术研发与应用 基于模块化设计的水产养殖增氧机的研制与推 基于“解耦联代谢”的剩余污泥减量化研究 高性能铁族块体非晶合金与铁基纳米晶软磁材 甬粳2号A及所配籼粳杂交晚稻新组合选育及产 激光打印机用定影膜及其制造技术的研究与产 白芍总苷治疗类风湿关节炎的开发与产业化 新型电液比例技术研究及产业化 纯毛高支抗皱西服面料的研发与产业化 高性能&高参数无压烧结碳化硅机械密封件制 高比能量锂离子电池负极材料的研发与产业化 高纯度氧化铝密封环及其制造方法和烧结技术 低能耗、抗干扰、高效分离吸尘器 360度可旋转便携式扫地机 高纯度结晶山梨酸的制备工艺
超特克HV823DB1 EL驱动演示板用户指南说明书
Supertex inc.Supertex inc.HV823DB1Doc.# DSDB-HV823DB1B032114The HV823DB1 EL Driver demoboard contains all the circuitry necessary to drive an EL (Electroluminescent) lamp. Simply connect it to a power supply and a lamp as shown below.The supplied circuit has been optimized to drive an 8.0in 2 lamp from a 3.0 to 3.3V supply. The circuit may be customized withdifferent component values to suit a particular application. To assist in customization, various circuits optimized for a variety of applications are provided. For additional assitance in designing EL driver circuits, please refer to AN-H34 (HV823 & HV825 EL Lamp Driver Circuits).Board Layout and ConnectionsEL DriverDemoboardConnections:EN - Enable InputEnables/disables the lamp driver. A logic high (V DD ) enables the driver and a logic low (GND) disables the driver. This input may be connected to a mechanical switch as shown,or to a logic circuit output that has a source impedance of less than 20KΩ.V DD- IC SupplySupplies the HV823 EL driver IC. The supplied circuit is op-timized for 3.0V to 3.3V operation. Current draw is typically 100µA when enabled and less than 1µA when disabled.V IN - Inductor SupplySupplies the high voltage power converter. Current draw is approximately 50mA.GND - Circuit GroundConnect to V DD negative terminal. Supply bypass capacitors for both V DD and V IN are provided on the demoboard. An ex-ternal supply bypass capacitor is not necessary.V A and V B - Lamp ConnectionsConnect to EL lamp of 3 to 12 square inches. Polarity is ir-relevant.EnableGeneral DescriptionSupertex inc. does not recommend the use of its products in life support applications, and will not knowingly sell them for use in such applications unless it receives an adequate “product liability indemnification insurance agreement.” Supertex inc. does not assume responsibility for use of devices described, and limits its liability to the replacement of the devices determined defective due to workmanship. No responsibility is assumed for possible omissions and inaccuracies. Circuitry and specifications are subject to change without notice. For the latest product specifications refer to the Supertex inc. (website: http//)©2014 Supertex inc. All rights reserved. Unauthorized use or reproduction is prohibited.Supertex inc.1235 Bordeaux Drive, Sunnyvale, CA 94089Tel: 2HV823DB1Doc.# DSDB-HV823DB1B032114HV823DB1 Circuit SchematicEnableV ON = V DD R EL-Osc EL LampGNDR SW-Osc Note:1. Tie V DD and V IN together if split suppies are not used. C DD is not needed when a single supply is used.Notes:1. Lamp brightness can vary by type and manufacturer.2. ‘same’ in the V IN column indicates that V IN and V DD are connected together to the same power supply.3. The recommended inductor is a Murata LQH4N series. Other inductors may be used, however, different inductor characteristics (especially series resistance) may result in overall circuit performance different from that listed. Please refer to Application Note AN-H33 for more information.Modifiying the Supplied CircuitThe supplied circuit is optimized to drive an 8.0in 2green lamp from a 3.0 to 3.3V supply. To better suit other applications, the circuit may be modified by changing one or more of the components. The following table lists various applications inorder of lamp size, along with supply voltages and compo-nent values. Find the circuit that most closely matches the desired application and change components as needed. For component locations, refer to the board layout and connec-tion diagram at the begining of this note.。