机构运动精度可靠性研究现状
结构机构可靠性及可靠性灵敏度分析——10章_展望)

第十章结构机构可靠性和可靠性灵敏度分析的展望可靠性是一个古老而又面临着新挑战的问题,它涉及 (1) 系统行为的描述和模拟,(2)系统行为的定量化,(3) 不确定性的描述、定量化和传递。
本书只是着重介绍了结构机构可靠性和可靠性灵敏度分析的一些经典方法和现在发展的新方法,研究在输入变量与系统行为之间关系确定,并且输入变量随机不确定性已知的条件下,不确定性的传递问题。
本书所介绍的这些方法只是可靠性工程涉及众多问题中的一个基本问题。
在结束本书的理论方法探讨之前,联系本书所研究的内容,对结构机构可靠性未来所需要研究的问题进行简单的展望。
1、输入变量不确定性的描述和定量化[1-14]一般输入变量的随机不确定性采用概率密度函数来描述,依据经典的概率统计理论,获取概率密度函数需要大量的样本数据,尤其是要准确获取密度函数的尾部时,则需要更大量的样本数据,而且往往影响系统行为失效概率的部分就是输入变量概率密度函数的尾部。
然而值得指出的是:由于经费和时间的限制,工程问题中的大样本数据往往是不可得的。
这使得可靠性研究人员投入了大量的精力和时间来研究小样本情况下母体概率密度函数的估计问题。
尽管挖掘小样本中关于母体信息的思路以及在同类产品中获取更多信息的方法是可取的,并且在今后相当长一段时间内基于这种思路的研究将在可靠性领域持续开展,但值得注意的是这种信息的挖掘和获取毕竟是有限的,因为小样本中本身所包含的信息量只是完整信息的一部分。
以有限的信息去推断完整的信息将承受一定的风险,了解并控制推断过程中的风险水平是保证所作推断有意义的前提。
另外,建立小样本情况下,输入变量不确定性的合适的描述模型也是解决信息不足问题的一个补充手段,如现在已在可靠性领域广泛研究的凸集描述模型和模糊描述模型等,还有各种描述的混合模型。
作为不足以获得概率密度函数情况下的必要补充,研究与样本信息量匹配的不确定性描述模型是输入变量不确定性描述和定量化方面的一项重要研究内容,并且在此基础上的各种不确定性描述模型的相容性也是今后可靠性领域的重要研究内容。
机构可靠性分析

q = [q1 , q2 ,L qn ]T —为考虑各种随机误差情况下,
机构有效结构参数向量; F = [ f1 , f 2 ,L f λ ]T —为λ个独立运动方程,正好解 出λ个输出运动。
19
机构运动学可靠性数学模型
(2)输出位移、速度、加速度与输入运动的关系式 位移:
Y = Y ( X , q)
32机构可靠性研究的主要参考文献1何水清王善结构可靠性分析与设计国防工业出版社19932师忠秀等多臂机构动作可靠性分析及计算方法青岛大学学报19983李立杰等k8机襟翼限位机构可靠性建模及求解方法南京航空航天大学学报19986曾声奎等系统可靠性设计分析教程北京航空航天大学学报200133机构可靠性研究的主要参考文献7孙志礼等实用机械可靠性设计理论与方法科学出版社20038赵广燕张建国改进的重要度抽样法在机构可靠性中的应用北京航空航天大学学报20039孙国仓结构与机构中的某些性能参数可靠性研究哈尔滨工程大学200310张树林黄文敏飞行器机构可靠性北京航空航天大学学报199511徐进丝杆升降机构传动的可靠性设计研究煤矿机械200334
Wd >Wr
此时机构运动可靠度即运动过程中驱动力(矩)所作的功—— 主动功 Wd 大于阻抗力(矩)所作的功——被动功的概率,即
Rm = P(Wd >Wr )
16
机构功能可靠性分析
当已知主动功和被动功的分布特性时, 即可求出机构的 运动的可靠度。 当主动功和被动功都为正态分布且相互独立 时,有:
β=
Wd − Wr
2 2 σW + σW
d r
式中: Wd、σ Wd ——主动功的均值和标准差;
M r、σ Mr ——被动功的均值和标准差。
17
机构功能可靠性分析
第7章 机构运动可靠性分析
此式建立了输出速度误差与输入速度误差,输入位移误差及结 构参数误差之间的关系
& & ∆Y = − Z∆X − Z 1 ∆X − T1 ∆q
7.2机构运动可靠性基本模型及计算方法 机构运动可靠性基本模型及计算方法
将上式再对时间微分,并令
∂F −1 d 2 ∂F d 2 ∂F d ∂F Z2 = [ 2 ( ) − 2 ( ) Z − 2 ( ) Z1 ] ∂Y dt ∂X dt ∂Y dt ∂Y
∂F −1 d 2 ∂F d 2 ∂F d ∂F T2 = [ 2 ( ) − 2 ( )T − 2 ( )T1 ] ∂Y dt ∂q dt ∂Y dt ∂Y
则
& && & ∆Y& = − Z∆X − 2 Z 1 ∆X − Z 2 ∆X − T2 ∆q
此式建立了输出加速度误差与输入加速度误差,输入速度误 差,输入位移误差及结构参数误差之间的关系
7.1概述 概述
机构可靠度的计算方法 机构可靠性分析的主要任务是建立机构性能输出参数与影响机 构性能输出参数变化的主要随机变量间函数或相关关系的数学 模型 根据机构运动学可靠性的定义,对于一个给定机构,它的位 置误差表达式为
∂D ∆S = ∑ ⋅ ∆xi i =1 ∂x i
n
7.1概述 概述
机构从动件的位置误差∆S 是各原始误差 ∆xi引起的局部误差
∂F & d ∂F ∂F & d ∂F d ∂F ∆Y + ( )∆Y + ∆X + ( )∆X + ( )∆q = 0 ∂Y dt ∂Y ∂X dt ∂X dt ∂q
令
∂F −1 d ∂F d ∂F Z1 = [ ( ) − ( )Z ] ∂Y dt ∂X dt ∂Y
对曲柄滑块机构运动精度可靠性模型的研究
( 16) 2 [o2 R c2 + E R c2 ] 8Y 2 2 8Y 2 2 ( ) { oz + } + ( ) oe 8z 9 8e 式 ( 10) 和式 ( 16) 就是既考虑尺寸误差又考虑运动 副 间 隙 误 差时的机构位移误差的均值和方差计算模型 , 一 般 认 为 尺 寸 误 差 服 从 正 态 分 布, 正 态 分 布 的 叠 加 仍 服从正态分布 , 所以位移误差服从正态分布 , 设 Z= Ac-Y > 0, 即实际误差 AY 小于极限误差 c, 则可靠度为 [7] R = P ( Z > 0) =
O 0 O
( Z) dZ =
1 ~ 2T
-B
e - 2 z dz =
1 2
( B)
( 17)
( 9)
式 中 ; B= u = c-u , c 为 误 差 的 极 限 值 , u, oy 是 以 上 所 求 o oy 位移特征值, 则仅考虑尺寸误差时曲柄滑块机构位移误 差 的可靠度为 R= 2 ( B) ,
图2
有效联接模型
( 13)
8Y 8R 8Y y 8Y = = ( 14) 8y 8R 8y 8R R 将以上 三 式 代 入 式 ( 11) , ( 下 角 标 I1 , I2 表 示 不 同 铰 链 的居域坐标 ) 有 o2 y = ( ( 8Y 2 2 ) ( oT + o2 I1 ) + 8T ( 15)
u= ( coSozu L
( 10)
~ L2 -( TSino+ e) ~ L2 -( TSino+ e) 2 由此看出用有效长度 R 代替杆长 T 后, 对输出误差均 值没有影响 , 再来看对方差的影响 , 将式 ( 5) 代入式 ( 2) , 求方差得 o2 Y = ( ( 8Y 2 2 8Y 2 2 ) oT + ( ) oI1 + 8T 8I1 ( 11)
对曲柄滑块机构运动精度可靠性模型的研究
可
一 一 q
一
…
: () 1 2
( )当 —0时 . ( ) 程 有 两 个实 根 . 2 式 8方 即
r : z
[ ] 钱 志 良 . 桂 生 具 有 最 佳 传 动 角 的 曲 柄 摇 杆 机 构 的 闭 式 解 2 苏 [] J.机 械设 计 ,2 0 、7 l ) 1 2 5 0 0 1 ‘ 1 :3 ~3 .4 E 3 刘 义 翔 . 勇 . 延 平 .按 行 程 速 比 系数 K 设 计 平 面 曲 柄 摇 3 常 李 杆 机 构 的 解 析法 [] J .机 械 工 程 师 .19 .( ) 3 2 9 5 2 :2 ~ 4 [ ] 马 喜 J . 勇 在 平 面 曲 柄 摇 杆 机 构 设 计 中 运 用 辅 助 角 方 法 4 I常 1 的 若 干 研 究 结 果 [] J .机 械 科 学 与 技 术 .1 9 .5 5 96 1【) E 3 华 大 年 主 编 .机 械 原 理 [ ] 5 M .北 京 :高 等 教 育 出 版 社 .191 9.
。s
导 十c导c 导一 + 号 。 z c: z。 。 。 s s z =
据 给 定 的行 程 速 比系 数 K = 1 1 . 计 算 器 算 得 极 位 .5用
夹 角 0= 1 . 5 1 9 3 。 2 5 8 3 5 5。
按 式 ( O . 时 1)此 将 式 ( ) 形 为 7变
・
无 论 出现 哪 种 情 况 . 式 ( ) 程 的 正 确 解 l 将 8方 T 值 代 人 式 () 求 出具 有 最 佳 传 动 角 ( ) 之 机 构 的 相 对 长 度 : 5. y …
民用飞机襟翼运动机构运动可靠性分析及优化设计
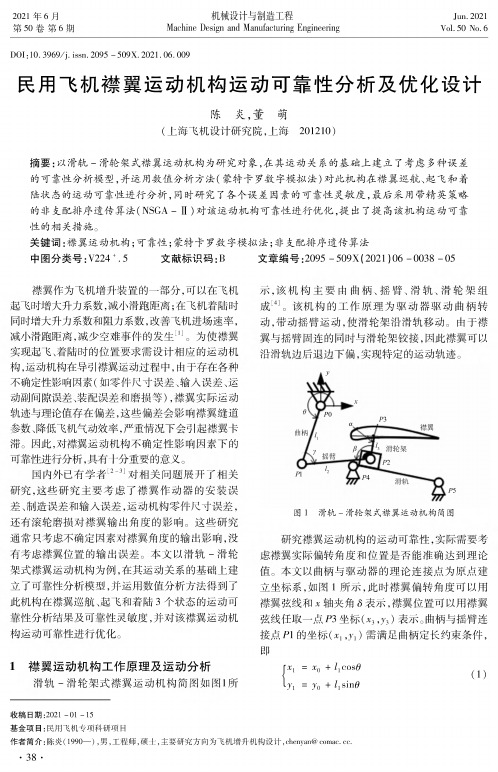
陈炎,董萌
(上海飞机设计研究院,上海201210)
摘要:以滑轨-滑轮架式襟翼运动机构为研究对象,在其运动关系的基础上建立了考虑多种误差
的可靠性分析模型,并运用数值分析方法(蒙特卡罗数字模拟法)对此机构在襟翼巡航、起飞和着
陆状态的运动可靠性进行分析,同 究了各 差因素的 性灵敏度,最后采用带精英策略
的非支配排序遗传算法(NSGA - # )对该运动机构可靠性进行优化,提出了提高该机构运动可靠
为原点建
立坐标系, 1所示, 襟 转角度可以用
襟翼弦线和(轴夹角*表示,襟
以用襟翼
弦线任取一点P3坐标((,*3 ) W&曲柄与摇臂连
接点P1的坐标((1,*1 )需满足曲柄定长约束条件, 即
{( %(0 $ Z1cos/
( 1)
*1 % *0 $ NCn/
收稿日期:2021 -01 -15 基金项目:民用飞机专项科研项目 作者简介:陈炎(1990一),男,工程师,硕士,主要研究方向为飞机增升机构设计,chenyan@ comac. co.
飞、着 的
求需设计相应的运动机
构,运动机构在导引襟翼运动
,由于
不确定性影响因素(如零件尺寸、输
、运
动副间
、装
和磨损等),襟
运动
轨迹与理论值
,这些
襟翼缝道
参数、降低飞机气动效率,严重情况 引起襟翼卡
&因此,对襟翼运动机构不确定性 因素下的
性
析,具
重要的意义。
' 已有学者 2-3(对关
展开
关
,些
襟翼作动器的安装误
2021年6月 第50卷第6期
机械设计与制造工程 Machine Design and Manufacturing Engineering
机构运动仿真的优势和局限性进行分析

机构运动仿真的优势和局限性进行分析
机构运动仿真是应用数学、物理、计算机等多个领域知识,利用计算机技术模拟机构在复杂环境中的运动过程,以实现机构设计、性能分析和优化设计的过程。
下面分析机构运动仿真的优势和局限性:
优势:
1. 降低设计成本:机构运动仿真可以在计算机上进行虚拟设计、模拟和测试,可以减少实际试验的时间和成本,从而降低设计成本。
2. 提高设计效率:机构运动仿真可以根据设计要求进行验证和优化,在这个过程中,可以不断调整仿真参数以尽可能地优化方案,从而提高设计效率。
3. 增强精度:由于机构运动仿真是根据精确的数学和物理模型进行计算,因此可以获得更准确的结果,这对于工程设计和开发至关重要。
4. 提高可靠性:运用机构运动仿真技术进行模拟分析可以发现机构构件之间的相互作用、载荷分布及异常情况等,轻松急救提前发现设计过程中可能存在的问题。
局限性:
1. 数据模型的准确度是制约仿真精度的主要因素,因此要保证机构运动仿真的准确性,必须要有足够的技术和经验。
2. 仿真技术的应用范围受限制。
例如在复杂的结构设计中,机构仿真方法则无力处理连续介质流动、微观结构等复杂问题。
3. 机构运动仿真大量使用计算机模拟,需要大量计算资源和高性能计算机的加持。
在一些科研或行业领域需求更高的情况下,常规计算机基本无法满足其需求,需要大型超级计算机、云计算等技术支持。
4. 机构运动仿真在人类智慧领域相较短时间内无法趋势到一定的境地。
基于虚拟样机技术的机构运动可靠性分析
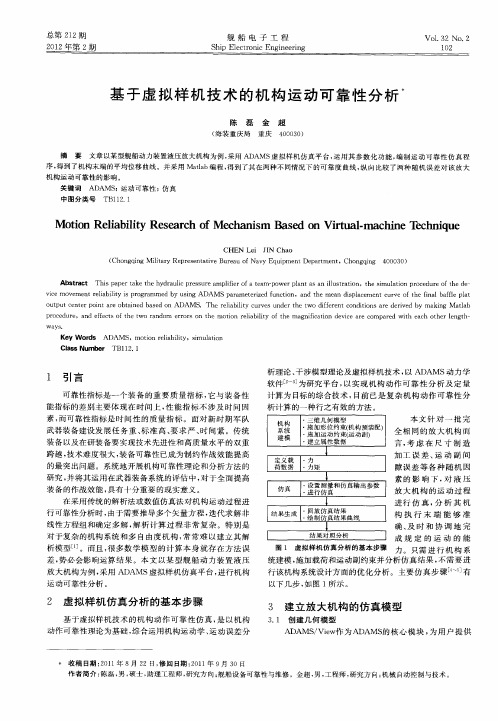
【 系统 ・ 施加 形位约 束( 构预装 配) 机 全 相 同 的 放 大 机 构 而 l 建 模 ・ 加运动 约束( 动副) 施 运
总第 2 2 1 期 21 0 2年第 2期
舰 船 电 子 工 程
S i e to i g n e i g h p Elc r n c En i e rn
Vo . 2 No 2 1 3 .
12 O
基 于 虚 拟 样 机 技 术 的 机 构 运 动 可 靠 性 分 析
陈 磊 金
p o e u e n fe t ft et a d m ro so h t eibit ft g iia in d vc r o a e t a h o he e g h— r c d r ,a d ef cso h wor n o er r n t e mo i rla l y o hema nfc to e iea e c mp rd wih e c t rln t on i
素 , 可 靠 性 指 标 是 时 间 性 的 质 量 指 标 。 面 对 新 时 期 军 队 而
析 理 论 、 涉 模 型 理 论 及 虚 拟 样 机 技 术 , A AMS动 力 学 干 以D
软件 。 为研究平 台 , 以实 现机 构动 作可 靠性 分 析及 定 量 计算为 目标 的综 合技术 , 目前 已是复 杂机构 动 作可 靠性 分 析计算 的一种行 之有效的方法 。
w ays .
KeyW or s ADAM S.mo in rla lt .smua in d to eibi y i lto i Cls m b TB1 2. a s Nu er ] 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机构运动精度可靠性研究现状
机构运动精度可靠性是影响产品质量、寿命的关键因素且已成为衡量机构运动性能的重要指标,文章对机构运动精度可靠性的研究现状进行了分析,并介绍了目前求解机构可靠度新方法及其应用。
标签:机构运动精度;可靠性;现状
1 概述
机构是传递运动和动力的可动装置,它是機械装备的特征骨架和执行器[1]。
机构的运动和动力性能直接关联着整个机械装备的品质和功能,提高机构的运动于动力性能一直是学者们的研究重点。
传统机构学将机构的概念局限于仅含刚性构件、理想运动副(无间隙或柔性)、构件尺寸绝对精确的机构系统。
然而,真实机构系统具有多种内外部不确定性(如几何公差、运动副间隙与磨损、构件物理参数如密度与弹性模量、工作载荷等的随机性)[2],这些不确定性对机构运动学与动力学性能有着不可忽视的影响,传统的以确定性参数为基础的机构学研究不能描述上述特征。
技术发展对机构的高精度、可靠性等提出了更高的要求。
机构运动精度可靠性研究是在特定的工作条件和时间内,真实机构的运动输出与理想机构运动输出之间的偏差落在期望误差限范围内的概率。
受不确定性影响,真实机构与理想机构的运动必然存在不确定性或随机偏差,即使这些内外部不确定性很小,但在机构设计时如果不加以考虑或考虑不充分,也可能会造成很大的机构输出的不确定性,进而导致机构运动精度下降、动作不可靠、定位不准确以及动力性能不佳,从而使整个机械装备的功能丧失、性能下降、故障率上升、寿命缩短和用户满意度下降等。
如1978年美国发射的陆地卫星2号由于偏航飞轮失效而导致整星失效,1987年德国发射的TVSAT卫星进入轨道后一翼展开而另一翼卡主而导致整星灾难。
因此,在机构系统设计中必须考虑内外部的不确定性具有相当的必要性和重要性。
但这是确定性设计方法难以胜任的,因此须采用不确定性工程设计理论与方法研究机构的运动输出与不确定性之间的内在联系和规律以及对应的机构设计与分析理论。
2 可靠性方法
可靠性方法是处理不确定性因素最为有效的途径[3]。
通常,不确定性分为随机性、模糊性和有界不确定性,其建模与分析方法分为概率和非概率两大类,与之对应的可靠性分为概率可靠性和非概率可靠性。
研究前者的数学方法主要有概率论、数理统计和随机过程。
对于后者,处理模糊性的数学工具是模糊数学,研究有界不确定性的数学方法和理论是非概率集合理论。
概率方法发展比较成熟,能够得到高精度的不确定性预估。
对机构系统而言,其不确定性主要为随机不确定性,因此,概率设计方法是机构运动不确定性分析与设计最为有效且十分重要的方法,目前已被学术界和工程界广泛认可并采用。
特别是对于有运动精度要求的机构,概率方法可以从概率统计角度对机构运动精度进行解释并赋予概率
精度的含义。
通过概率方法对机构运动精度可靠性研究目前可分为点(瞬时)可靠性方法和时变(区间)可靠性方法,下面将分别介绍。
2.1 点(瞬时)可靠性
在现有的机构可靠性理论中,机构运动精度可靠性大多局限于研究机构运动在其预定工作范围内某特定位置(或特定点)真实机构的运动输出与理想机构运动输出之间的偏差落在期望误差限范围内的概率,我们将这种基于时间点的可靠性称为点可靠性或瞬时可靠性。
机构运动输出误差由机构本身固有的结构误差和由于制造误差、运动副间隙等不确定性因素产生的机械误差两部分组成。
许多学者在此方面做了大量的研究,提出了诸如转换机构法、直接微分法、微分位移合成法、环路增量法、矩阵法等误差建模方法以及最坏情况分析、概率分析和区间分析等误差分析处理方法。
机构运动精度可靠性借助结构工程领域的极限状态模型建立其分析模型,并采用一次二阶矩方法(First Order and Second Moment,FOSM)和蒙特卡洛分析方法(Mento Carlo Simulation,MCS)分析机构在其预定工作范围内某点的实际输出满足期望运动输出的概率。
但是,点可靠性仅研究了机构在预定工作范围内每一给定位置或时间点的可靠度问题,而没有涉及到机构在整个工作范围内的可靠性问题,所以它只反映了机构在给定位置处的局部信息而不能反映机构在该点之前或之后的机构运动情况,不能描述出机构在整个运动范围内的全局信息和特征。
因此,有学者提出了时变(区间)可靠性概念并致力于这方面的研究。
2.2 时变(区间)可靠性
时变可靠性指与时间相关的一种动态可靠度,它不仅反映了所研究的当前时间点的信息而且包括该时间以前系统的全部信息,其最大特点是在其分析模型中引入了时间变量并考虑了两时间点之间的相关性。
时变可靠性研究源于结构工程领域,所涉及的可靠性分析模型中包含随机变量随时间变化和材料强度随时间下降。
目前,时变可靠性分析方法主要有极值法和基于Poison假设的首次穿越理论。
极值法的思想是通过获得所考察对象的性能指标的全局极大或极小值概率分布而将时变可靠度问题转换为点可靠度问题求解。
基于Poison假设的首次穿越理论归结为计算穿越率的问题,穿越率求解是这类问题的核心和难点。
针对该问题,Rice提出著名的Rice公式,随后Middleton对其进行了改进。
但是除对特殊的随机过程如平稳高斯过程可以求得解析穿越公式外,对于一般随机过程其穿越率是难以获得的,为此,张均富提出了基于一次二阶矩(FOSM)和首次穿越理论的均值首穿方法(Mean Value First Passage Method,MVFP)并推导了穿越率的解析表达式[4]。
为了解决均值首穿法在某些情况下求解精度不高和为了避免求解穿越率时在数学处理上的困难,张均富提出联合极值点法(Joint Extreme Point Method,JEP)对球面函数机构的运动精度可靠度进行了高精度求解[5]。
3 结束语
文章介绍了机构运动精度可靠性研究现状,目前研究得最多且较为成熟的为点的(瞬时)非时变可靠性,但是点可靠性仅仅反映系统在某一时间点的局部信
息而非全局信息。
时变(区间)可靠性包含了系统某时间段内的全部信息,所以它较之点可靠性更具有实际意义,但是目前为止在国内外的研究不是很多。
机构可靠性理论的发展对机构的设计、综合有着重大的实际意义,能够预测工程系统的剩余可靠度和寿命,能为为设备或系统的维修、维护提供理论数据并做到事前维护而避免灾难性事故的发生。
参考文献
[1]杨廷力.机器人机构拓扑结构学[M].北京:机械工业出版社,2003.
[2]孟宪举,张策,詹梅晶,等.含间隙连杆机构精度概率分析模型[J].机械设计,2004,21(9):35-37.
[3]乔心州.不确定结构可靠性分析与优化设计研究[D].西安:西安电子科技大学,2008,12.
[4]Zhang J F,Du X P. Time-Dependent Reliability Analysis for Function Generator Mechanisms[J].Journal of Mechanical Design,2011,133(3).
[5]Zhang J f. Reliability analysis of spherical function generating mechanisms[J].Journal of Advanced Mechanical Design,Systems,and Manufacturing,2014.
作者简介:李晓松(1990-),四川达州人,研究方向为设备可靠性与维护改造。