三相异步电动机的功率和电磁转矩
三相异步电动机转矩与功率的关系

三相异步电动机转矩与功率的关系
电动机额定电压下以额定转速nN运行,输出额定机械功率 PN时,电机转轴上对应输出的机械转矩为额定电磁转矩TN。
强调: 1.单位:KW , r/min , NM.
2.各物理量的意义:额定转速Nn , 输出额定机械功率 PN ,输出的机械转矩为额定电磁转矩TN。
[例1]已知某三相异步电动机额定功率PN=4kW,额定转速nN=1440r/min,过载系数为 2.2,起动能力为 1.8。
试求额定转矩TN、启动转矩Tst、最大转矩Tm。
解:额定转矩为
起动转矩为
最大转矩为
[补充例题] 例:已知PN=4.5 KW,nN=950r/min,N=84 .5%,U1=380 V,Y接,f1=50Hz,m=2, st=1.7。
求:
(1)磁极对数 P;(2) SN;(3)TN;
(4)输入功率P1;(5)最大转矩Tm;(6)起动转矩Tst
解:。
异步电动机的功率、转矩与运行性能

维护保养
安全操作
运行监测
环境适应
定期对异步电动机进行维护保养,包 括清洁、润滑、检查等,确保其正常 运行。
Байду номын сангаас
对异步电动机的运行状态进行实时监 测,发现异常及时处理,防止故障扩 大。
06
CATALOGUE
异步电动机的发展趋势与未来展望
技术创新
01
高效电机设计
通过优化电机设计,提高异步电 动机的运行效率和功率密度,降 低能耗。
定的品牌和型号。
功率匹配
确保所选异步电动机的功率与实际负 载需求相匹配,避免过大或过小的功 率选择。
经济性
在满足性能要求的前提下,选择性价 比高的异步电动机,降低运行成本。
使用注意事项
在使用异步电动机时,应遵循安全操 作规程,避免发生触电、机械伤害等 安全事故。
根据实际使用环境,如温度、湿度、 海拔高度等,选择合适的异步电动机 或采取相应的防护措施。
异步电动机的功率 、转矩与运行性能
contents
目录
• 异步电动机的基本原理 • 异步电动机的功率特性 • 异步电动机的转矩特性 • 异步电动机的运行性能 • 异步电动机的应用与选型 • 异步电动机的发展趋势与未来展望
01
CATALOGUE
异步电动机的基本原理
工作原理
异步电动机是利用电磁感应原理工作的旋转电机。当 三相交流电通过定子绕组时,产生旋转磁场,该磁场
最大转矩
最大转矩
异步电动机在运行过程中能够承受的最大瞬时转矩。
影响因素
最大转矩与电动机的设计、制造工艺和使用环境等因 素有关。
意义
最大转矩决定了电动机承受突然负载变化的能力,是 电动机安全运行的重要指标。
三相异步电动机的基本工作原理和结构

三相异步电动机的基本工作原理和结构三相异步电动机是一种常见的电动机类型,广泛应用于各个领域。
它的基本工作原理和结构对于了解电动机的工作原理和性能具有重要意义。
一、基本工作原理三相异步电动机的基本工作原理是利用电磁感应和电磁力相互作用的原理。
它由定子和转子两部分组成。
1. 定子:定子由三个相位相隔120度的绕组组成,每个绕组被连接到一个相位的交流电源上。
当交流电源通电时,定子的绕组中会产生交变电磁场。
2. 转子:转子由导体材料制成,通常是铜或铝。
转子内部的导体形成了一组绕组,称为转子绕组。
转子绕组与定子绕组之间存在磁场的相互作用。
当交流电源通电后,定子绕组中的交变电磁场会感应出转子绕组中的电流。
由于定子绕组和转子绕组之间存在磁场的相互作用,转子绕组中的电流会产生电磁力,使转子开始旋转。
由于定子绕组中的电流是交变的,所以转子会不断地受到电磁力的作用,从而保持旋转。
二、结构特点三相异步电动机的结构特点主要包括定子、转子和机壳三部分。
1. 定子:定子通常由一组三相绕组和铁芯组成。
绕组通过固定在定子槽中的方法固定在铁芯上。
绕组的数量和连接方式与电机的功率和转速有关。
2. 转子:转子一般由铁芯和绕组组成。
转子绕组通常是通过槽和导条的形式固定在铁芯上。
转子绕组的数量和连接方式也与电机的功率和转速有关。
3. 机壳:机壳是电机的外壳,通常由铸铁或铝合金制成。
机壳的作用是保护电机内部的部件,同时起到散热和隔离的作用。
三、工作特性三相异步电动机具有一些特殊的工作特性。
1. 转速:三相异步电动机的转速与电源的频率和极数有关。
当电源频率恒定时,电动机的转速与极数成反比。
这意味着可以通过改变电源频率或改变电动机的极数来实现不同的转速要求。
2. 启动特性:三相异步电动机的启动通常需要较大的起动电流。
为了降低启动时的电流冲击,通常采用起动装置,如星角启动器或自耦变压器。
3. 转矩特性:三相异步电动机的转矩与电动机的电流成正比,并且与电动机的功率因数有关。
(完整版)三相异步电动机电磁计算
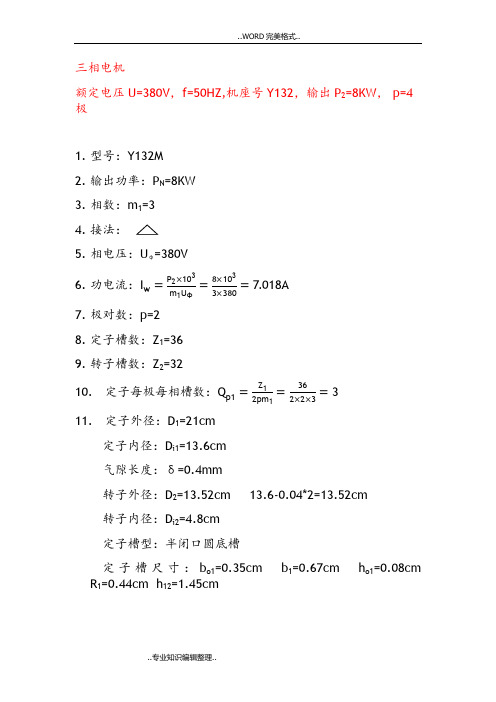
三相电机额定电压U=380V,f=50HZ,机座号Y132,输出P2=8KW, p=4极1.型号:Y132M2.输出功率:P N=8KW3.相数:m1=34.接法:5.相电压:Uφ=380V6.功电流:I w=P2×103m1UΦ=8×1033×380=7.018A7.极对数:p=28.定子槽数:Z1=369.转子槽数:Z2=3210.定子每极每相槽数:Qp1=Z12pm1=362×2×3=311.定子外径:D1=21cm定子内径:D i1=13.6cm气隙长度:δ=0.4mm转子外径:D2=13.52cm 13.6-0.04*2=13.52cm转子内径:D i2=4.8cm定子槽型:半闭口圆底槽定子槽尺寸:b o1=0.35cm b1=0.67cm h o1=0.08cm R1=0.44cm h12=1.45cm转子槽形:梯形槽转子槽尺寸:b o2=0.1cm b r1=0.55cm b r2=0.3cm h o2=0.05cm h r12=2.3cm12.极距:τ=πD i12p =3.1415×13.64=10.681cm13.定子齿距:t1=πD i1Z1=3.1415×13.636=1.187cm14.转子齿距:t2=πD2Z2=3.1415×13.5232=1.327cm15.气隙长度:δ=0.04cm16.转子斜槽距:b sk=t1=1.187cm17.铁芯长度:l=16cm18.铁芯有效长度:无径向通风道:l ef=l+2δ=16.08cm19.净铁芯长:无径向通风道:l Fe=K Fe l=0.95*16=15.2cmK Fe=0.95(不涂漆)20.绕组型式:单层交叉式21.并联支路数:a1=122.节距:1-9,2-10,11-1823.每槽导线数:由后面计算的数据根据公式计算为:每极磁通φ1=0.00784wb波幅系数:K A=1.46绕组系数:K dp1=0.96每相串联有效导线数:Nφ1K dp1=K z′U1×10−2K Aφ1×50f1=1.21×380×10−2 1.46×0.00784×5050=401.70 K’z取1.21每相串联导线数:Nφ1=Nφ1K dp1K dp1=401.700.96=418每槽导线数:N1‘=41812=34.83取整数:N1=3524.线规:导线并饶根数与截面积之积(式中的值由其后的公式算得):N1’A1′=I1a1J1=9.16271×5.19=1.7655mm2由此可通过查表知线规为:2-1.06(N-φ)25.每根导线截面积:A cl=0.00882cm226.槽有效面积:A e=A s-A i=1.1444cm2A s=2R+b s12×(h s′−h)+πR22A i=C i(2h s12+πR)C i-绝缘厚度 h-槽楔厚度 C i=0.08mm27.槽满率:k s=N s1N cl d2A e ×100%=2×35×0.0131.1444=79.5%d-绝缘导线外径 d=1.14mm28. 每相串联导线数:N φ1=Z 1N s1ma 1=35×363=42029. 绕组分布系数:K d1=sin (α2q 1)q 1sin (α2)=0.96q 1=Z 12pm=364×3=3α=2pπZ 1=2×2×180°36=20°30. 绕组短距系数:K p1=sin (β×90°)=1 β=y mq 131. 绕组系数:K dp1=K d1K p1=0.96二.磁路计算32. 每极磁通:∅1=K E U ∅2.22fN ∅1K dp1=0.00784Wb =380×0.9232.22×50×420×0.96K E =0.923 K E 范围0.85-0.95 33. 定子齿截面积:A t1=b t1l Fe Z 12p =76.05cm 2 34. 转子齿截面积:A t2=b t2l Fe Z 22p=75.95cm 2b t1,b t2-定,转子齿宽35. 定子轭部截面积:A j1=h j ′l Fe =1.877×15.2=28.53cm 2 h j ′=D 1−D i12−h s +13R =3.7−(0.08+1.45+0.44)+0.443=1.87736. 转子轭部截面积:A j2=h j2′l Fe =30.65cm 2 h j2′=D 2−D i22−h R −23d k =2.016因无通风孔d k =037. 空气隙面积:A δ=τl ef =10.681×16.08=171.8cm 2 38. 波幅系数:K A =1.46 K S =1.276K A 由饱和系数K S 查得,开始计算时先假定K S39. 定子齿磁密:B t1=K A∅1A t1×104=1.46×0.0078476.05×104=1.505T40. 转子齿磁密:B t2=K A∅1A t2×104=1.46×0.0078475.95×104=1.507T41. 定子轭磁密:B j1=12×∅1A j1×104=12×0.0078428.53×104=1.37T 42. 转子轭磁密:B j2=12×∅1A j2×104=12×0.0078430.65×104=1.28T43. 气隙磁密:B δ=K A∅1A δ×104=1.46×0.00784171.8×104=0.666T44. 定子齿磁场强度:H T1=20.58A/cm (查表硅钢片磁化曲线) 45. 转子齿磁场强度:H t2=20.79A/cm (查表硅钢片磁化曲线) 46. 定子轭磁场强度:H j1=11.44A/cm (查表硅钢片磁化曲线) 47. 转子轭磁场强度:H j2=8.43A/cm (查表硅钢片磁化曲线) 48. 定子齿磁路计算长度:h T1′=h s1+h s2+R3=1.597cm49. 转子齿磁路计算长度:h T2′=h R1+h R2=2.3cm 50. 定子轭磁路计算长度:l j1′=π(D i1−h j1′)4p=7.51cm 51.转子轭部磁路计算长度:l j2′=π(D i2+h j2′)4p=2.67cm52. 气隙磁路计算长度:δe =δK c1K c2=0.4×1.308×1.031÷10=0.05393cmK c1=t1t1−r1δK c2=t2t2−r2δt-齿距 b0-槽口宽53.定子齿磁位降:F t1=H t1×h t1′=32.86A54.转子齿磁位降:F t2=H t2×h t2′=47.81A55.定子轭部磁位降:F j1=C1H j1l j1′=43.31AC1=0.504 定子轭部磁路校正系数56.转子轭部磁位降:F j2=C2H j2l j2′=9.23AC2=0.41 转子轭部磁路校正系数57.气隙磁位降:Fδ=0.8Bδδe×104=0.8×0.666×0.05393×104=287.34A58.饱和系数:K s=F t1+F t2+FδFδ=32.86+47.81+287.34287.34=1.28与38项比对59.总磁位降:F=F t1+F t2+F j1+F j2+Fδ=32.86+47.81+43.31+9.23+287.34=420.55A60.励磁电流:I m=4.44pFmN∅1K dp1=4.44×2×420.553×420×0.96=3.087A61.励磁电流标幺值:I m∗=I mI w =3.0877.018=0.439962.励磁电抗标幺值:X m∗=1I m∗=10.4399=2.2732三.参数计算63.线圈平均半匝长度:l c1=l e+2(d+l E′)=31.22cmd=1.5cm(直线部分伸出长) l E′=kτck对2,4极取0.58 τc-平均节距τc=10.54cm64. 线圈端部平均长度:l E =2(l E ′+d )=15.22cm 65. 线圈端部轴向投影长度:f d =l E ′sin α=3.77cm 66. 阻抗折算系数:K z =m 1(N ∅1K dp1)2m 2(N ∅2K dp2)2=15241式中:对笼型转子m 2=Z 2,N ∅2=1,K dp2=1 67. 定子相电阻:R 1=ρ1N ∅1lc1a 1N c1A c1=1.61Ω ρ1-导线电阻率标幺值:R 1∗=R 1I w U ∅=0.029768. 转子导条电阻:R B =K zK B ρB l B A B=1.1407Ω式中:K B =1.04(对铸铝转子) ρB -导条电阻率 l B =16cm(转子导条长度) A B =0.965cm 2(每根导条截面积) 标幺值:R B ∗=R B ×I 2U ∅=1.1407×7.018380=0.021169. 转子端环电阻:R R =K zρR Z z D R2πp 2A R =0.3467ΩρR-端环电阻系数 D R-端环平均直径(10.7cm) A R-端环截面积(2.6cm2)标幺值:R R∗=R R I wU∅=0.3467×7.018380=0.00670.转子电阻标幺值:R2∗=R B∗+R R∗=0.0211+0.006=0.027171.漏抗系数:C x=0.4π2fl ef(N∅12pq1)(I wU∅)×10−5=0.4×3.14152×50×16.08×(42022×3)(7.018380)×10−8=0.0172372.定子槽漏磁导:λs1=K U1λU1+K c1λc1=1.2431K U1=1 K c1=1 λU1=0.4097 λc1=0.833473.定子槽漏抗:X s1∗=(lσ1l ef )λc1C x=(1616.08)×0.8334×0.01723=0.01429lσ1=l1(对无径向通风道)74.定子谐波漏磁导:λd1=0.0129对60°相带整数槽绕组,且23≤β≤1λd1=π218×[(5q12+1)−(14cq1+23c2−14c3q1)3q12]−K dp12式中:c-短距槽数,c=8q1(1-p)75.定子谐波漏抗:x d1∗=m1q1τπ2δef K sλd1C x=1.8243×0.01723=0.0314376.定子端部漏磁导:λE1=0.67(l E-0.64τc)=5.677877.定子端部漏抗:X E1∗=(q1l ef )λE1C x=(316.08)×5.6778×0.01723=0.0182578. 定子漏抗标幺值:X 1∗=X s1∗+X d1∗+X E1∗=0.01429+0.03142+0.01825=0.0639779. 转子槽漏磁导:λs2=λU2+λc2=2.1754 λU2=h R0b 02=0.5(槽上部漏磁导)λL2=1.6754(槽下部漏磁导)80. 转子槽漏抗:X s2∗=(lσ2l ef)K dp12(Z1Z 2)λs2C x =0.03862=2.2413×0.01723 l σ2=l 281. 转子谐波漏磁导:对笼型转子:λd2=∑1(k Z 2p ±1)2=0.013K=1,2,3 82.转子谐波漏抗:X d2∗=m 1q 1τK dp12π2δef K sλd2C x =1.6757×0.01723=0.0288783. 转子端部漏磁导:λE2=0.757(l B−l 21.13+D R 2p)=2.025(对笼型转子)84. 转子端部漏抗:X E2∗=q 1l efK dp12λE2C x =0.3478×0.01723=0.00599 85.转子斜槽漏抗:X sk∗=0.5(b sk t 2)2X d2∗=0.5×(1.1871.327)2×0.02887=0.0115586. 转子漏抗标幺值:X 2∗=X s2∗+X d2∗+X E2∗+X sk ∗=0.08503 87. 运行总漏抗:X ∗=X 1∗+X 2∗=0.06397+0.08503=0.149四.运行性能计算88.满载电流有功分量:I p∗=1η=10.88=1.136设η=0.88 η−效率89.满载电抗电流:I x∗=σ1X∗I p∗2[1+(σ1X∗I p∗)2]=1.0281×0.149×1.1362×[1+(1.0281×0.149×1.136)2]=0.2037式中:σ1=1+I m∗X1∗=1+0.4399×0.06397=1.0281 90.满载电流无功分量:I Q∗=I m∗+I x∗=0.4399+0.2037=0.643691.满载电动势比值:K E=1−(I p∗R1∗+I Q∗X1∗)=1−(1.136×0.0297+0.6436×0.06397)=0.925与32项进行比对92.定子电流:I1∗=√I p∗2+I Q∗2=√1.1362+0.64362=1.3056I1=I1∗I w=1.3056×7.018=9.1627A93.转子导条电流:I2∗=√I p∗2+I x∗2=√1.1362+0.20372=1.154I2=I2∗I w K1=1.154×7.018×37.8=306.13AK1-电流折算系数K1=m1N∅1K dp1Z2=3×420×0.9632=37.894.转子端环电流:I R=Z22πp I2=322×3.1415×2×306.13=779.58A95.定子电密:J1=I1a1N c1A c1×102=9.16271×1.76423=5.19A/mm296.线负荷:A1=m1Z∅1I1πD i1=3×420×9.16273.1415×13.6=270.22Acm97.热负荷:AJ1=A1J1=1402.4498.转子导条电密:J B=I2A B×102=306.130.965×102=3.17A/mm299.转子端环电密:J R=I RA R×102=779.582.6×100=2.998A/mm2100.空载电动势比值:K E0=1−I m∗X1∗=1−0.4399×0.06397=0.9719101.空载定子齿磁密:B t10=K E0K E B t1=0.97190.925×1.505=1.5813T102.空载定子轭磁密:B j10=K E0K E B j1=0.97190.925×1.37=1.4395T103.定子齿单位铁损耗:p t1由B t10查表得44.02×10−3W/cm3 104.定子轭单位铁损耗:p j1由B j10查表的36.7×10−3W/cm3 105.定子齿体积:V t1=2pA t1h t1′=485.68cm3106.定子轭体积:V j1=4pA j1l j1′=1713.73cm3107.铁损耗:P Fe=k1pt1V t1+k2pj1V j1对半闭口槽:k1=2.5,k2=2P Fe=(2.5×44.02×485.68+2×36.7×1713.73)×10−3= 179.24W标幺值:P Fe∗=P FeP N×103=0.0224108.基本铁耗:P Fe1∗=pt1V t1+pj1V j1 P N×103=44.02×10−3×485.68+36.7×10−3×1713.738000=0.01053109.定子电阻损耗:P cu1∗=I1∗2R1∗=1.30562×0.0297=0.0506P cu1=P cu1∗P N ×103=0.0506×8000=404.8W110. 转子电阻损耗:P cu2∗=I 2∗2R 2∗=1.1542×0.0271=0.0361 P cu2=P cu2∗P N ×103=288.8W 111. 风摩损耗:P fv *参考试验值确定为0.01 P fv =P fv ∗P N ×103=0.01×8000=80W 112. 杂散损耗:P s *对铸铝转子可取0.02P s =P s ∗P N ×103=0.02×8000=160W113. 总损耗:∑P ∗=P cu1∗+P cu2∗+P Fe ∗+P fv ∗+P s ∗=0.0506+0.0361+0.0224+0.01+0.02=0.1391 114. 输入功率:P 1∗=1+∑P ∗=1.1391 115. 满载效率:η=1−∑P ∗P 1∗=1−0.13911.1391=0.878η−η′η=0.878−0.880.878=−0.0023>−0.005与88项假定值比对116. 功率因数:cos φ=1I 1∗η=11.3056×0.878=0.872117. 满载转差率:S N =P cu2∗P em∗=0.03611.07797=0.0335P em *-气隙电磁功率P em ∗=P 1∗−P cu1∗−P Fe1∗=1.07797118. 额定转速:n N =60f (1−S N )p=60×50×(1−0.0335)2=1449.75r/min119. 最大转矩倍数: T max ∗=N2×(R 1+√R 1+X ∗2)=2×(0.0297+√0.02972+0.1492)=2.66五.起动性能计算I st =(2.5~3.5)T max ∗×I w =61.8A120. 起动时槽磁动势: F st =0.707I stN ∅1a 1×(K V1+K dp1K d1Z1Z2)√K E0=3071.09A121. 虚拟磁密:B L =F st ×10−41.6δβc=5.0241TβL =0.64+2.5√δt 1+t 2=0.955122. 起动漏磁饱和系数:K as =0.418123. 定子槽口宽增大:∆b 01=(t 1−b 01)(1−k as )=0.4874 124. 转子槽口宽增大:∆b 02=(t 2−b 02)(1−k as )=0.7141 125. 定子槽上部漏磁导减少:∆λU1=h r0−0.58h r1b 01(∆b 01∆b 01+1.5b 01)=0.1836126. 转子槽上部漏磁导减少:∆λU2=h R0b 02(∆b 02∆b 02+b 02)=0.4397127. 起动定子槽漏磁导:λs1st =K U1(λU1−∆λU1)+K c1λc1=1.0596 128. 起动定子槽漏抗标幺值:X s1st ∗=λs1st λs1X s1∗=1.05961.2431×0.01429=0.01218129. 起动定子谐波漏抗标幺值:X d1st ∗=k as X d1∗=0.01218 130. 定子起动漏抗标幺值:X 1st ∗=X s1st ∗+X d1st ∗+X E1∗=0.01218+0.01313+0.01825=0.04356131. 挤流转子导条相对高度:ε=2πh B √b Bb s fρB ×109=1.551h B -转子导条高度(cm ) b Rb S-转子导条宽与槽宽之比,对铸铝转子为1ρB -转子导条电阻率 h B =2.35cm 132. 导条电阻等效高度:h ρR =h B φ(ε)k a=2.351.45×1=1.621133. 槽漏抗等效高度:h ρx =h B ψ(ε)k a =2.35×0.78×1=1.833 134. 挤流电阻增大系数:K R =(1+a )φ2(ε)1+a [2φ(ε)−1]=1.308a =b 1b 2135. 挤流漏抗减少系数:K x =b 2(1+a )2ψ(ε)b px(1+a ′)2(K r1′K r1)=0.888a ′=b 1b pxb px =b 1+(b 2⋯⋯b 1)ψ(ε)136. 起动转子槽下部漏磁导:λL2st =K x λL2=K X ×2h 1b 0+b 1+λL =1.4875 λL =4β(1+α)2k τ1137. 起动转子槽漏磁导:λs2(st )=(λU2−∆λU2)+λL2st =1.5478 138. 起动转子槽漏抗标幺值:X s2st ∗=λs2st λs2×X s2∗=0.0275139. 起动转子谐波漏抗标幺值:X d2st ∗=k as X d2∗=0.01207 140. 起动转子斜槽漏抗标幺值:X skst ∗=k as X sk ∗=0.0048 141. 转子起动漏抗标幺值:X 2st ∗=X s2st ∗+X d2st ∗+X E2∗+X skst ∗=0.05036 142. 起动总漏抗标幺值:X st ∗=X 1st ∗+X 2st ∗=0.04356+0.05036=0.09392143. R Bst ∗=[k R(l ef−N V2b 02l B)+l B −(l f −N V2b 02)l B]×R B ∗=0.0276144. 转子起动电阻标幺值:R 2st ∗=R Bst ∗+R R ∗=0.0276+0.006=0.0336 145. 起动总电阻标幺值:R st ∗=R 1∗+R 2st ∗=0.0297+0.0336=0.0633 146. 起动总阻抗:Z st ∗=√R st ∗2+X st ∗2=0.1133147. 起动电流:I st =I KwZ st∗=7.0180.1133=61.94A61.94−61.861.94=0.0023<0.005148. 起动电流倍数:I st ∗=61.949.1627=6.76 149. 起动转矩倍数:T st ∗=R 2(st )∗Z st ∗2(1−S N )=0.03360.11332×(1−0.0335)=2.53。
电工技术:三相异步电动机的转矩与机械特性
二、机械特性
2.人为机械特性
人为地改变电动机地任一个参数(如U1、f1、p、定子回路电阻或电抗、转子 回路电阻或电抗)的机械特性称为人为机械特性。
R2 m1 p U s T 2 R2 ' 2 2f1 ( R1 ) ( X1 X 2 ) s
2 1
二、机械特性
一、电磁转矩
2.参数表达式
Pem T 1
2 m1 I 2
R2 2 R2 m1 pU1 S S 2 2f 1 R2 2 2f 1 R1 + X 1 X 2 p S
T与电源参数(U1、f1)、结构参数(R、X、m、p)和运行参数(s)有关。 参数表达式用来分析或计算参数的变化对三相异步电动机运行性能的影响。
适用于绕线型异步电动机。
三相异步电动机的人为机械特性很多:
• 降低定子端电压的人为特性; • 改变转子回路的电阻的人为特性;
• 改变定转子回路电抗的人为特性;
• 改变极数后的人为特性; • 改变输入频率的人为特性等 一般重点研究降低定子端电压的人为特性和改变转子回路电阻的人为特性。
二、机械特性
(1) 降ቤተ መጻሕፍቲ ባይዱ时的人为机械特性
一、电磁转矩
3.实用表达式
2Tmax T S Sm Sm S
TN 9.55 PN nN
实用表达式应用于工程计算中。 通过铭牌数据求取电动机转矩的方法。
Tmax
PN mTN 9.55m nN
S m S N m 2 m 1
二、机械特性
电动机电磁转矩与转速之间的关系曲线,称为电动机的机械特性。
电压下降: • 理想空载速度不变; 定子电压 变化
第22讲 三相异步电动机的功率和电磁转矩
。定
I1 I 0 子电流特性曲线如图。
三相异步电动机的工作特性
三、功率因数特性 cos1 f (P2 )
异步电动机运行时需要从电网吸收 无功电流进行励磁,所以I1电流总是滞后 电源电压U1,功率因数 cos1 1 。空载时 ,定子电流为I0,基本为励磁电流,此时 功率因数为 cos1 0.1--0.2 左右。当负载 P2增大时,励磁电流I0保持不变,有功 电流随着P2的增大而增大,使 cos1 增大,接近额定负载时,功 cos1 0.76 0.9 左右。如超过额定功率后负载进一步 率因数最高, 增大,转速下降速度加快,s上升较快,使 R/s 下降较快,转 子电流有功分量所占比例下降,使定子电流有功分量比例也下 降,从而使 cos1反而减小,曲线如图。
T f (P2 ) 也为一直线。电磁转矩特性曲线如图。
R/s2
三相异步电动机的工作特性
五、效率特性 f (P2 )
根据效率公式,有
p P2 P1 p 1 P1 P1 P2 p
当P2变化时,效率η的变化取决于损耗 p的变化。而 损耗:
p p
Cu1
pCu1 pFe pCu2
pm+ps P2
P1
PM
Pm
异步电动机功率平衡流程图
二、三相异步电动机的转矩关系
异步电动机传输给转轴的总机械功率Pm就是电磁转矩T与 转轴机械角速度Ω的乘积,即
Pm T T
同时还可以表示为: T Pm Pm
Pm
2 n 60
Pm PM 2 n1 1 (1 s ) 60
2 ) P1k 3 I1k ( R1 R2
从而可求得:短路阻抗:
《电子电工技术》课件——三相异步电动机的电磁转矩机械特性
此过程电中机I稳2 定运I行1 在新时的,
T 电源提转供速的下功,工率作自于动d增'点大。
2、最大转矩 Tmax :
电机带动最大负载的能力。
如果TL Tmax电机将会
Tn
Tm0
n
因带不动负载而停转。
最大转矩对应的转差率称临界转差率Sm
T
K
R22
sR2 (sX 20 )2
U12
0 Sm
Sm=
–R—2 X20
得到转矩公式
T
K
R22
sR2 (sX 20)2
U12
三、机械特性
转矩特性 T= f (S) 机械特性 n = f (T)
根据转矩公式 得特性曲线:
T
0
T
K
R22
sR2 (sX 20 )2
U12
n
n
0
s
T
1
三个重要转矩
1、 额定转矩 TN :
电机在额定电压下,以额
n
n nN0
定转速 nN 运行,输出额 定功率 PN 时,电机转轴
(2)工作时,一定令负载转矩
TL
Tm
a
,否则
x
电机将停转。致使
n 0 (s 1) I2 I1 电机严重过热
3 、 起动转矩 Tst:
电机起动时的转矩。
U1↓→ Tst T R2↑→ Tst↑
T
K
R22
sR2 (sX 20 )2
U12
其中 n 0 (s 1)
Tm R2
Tst
则
Tst
K
Φ
Φ
Φ -
①
③
⑦
二、单相异步电动机的特点:
第二节 三相异步电动机的电磁转矩和机械特性
第二节三相异步电动机的电磁转矩和机械特性三相异步电动机转轴上产生的电磁转矩是决定电动机输出的机械功率大小的一个重要因素,也是电动机的一个重要的性能指标。
一、三相异步电动机的转矩特性1、电磁转矩的物理表达式三相异步电动机的工作原理告诉我们,电磁转矩是旋转磁场与转子绕组中感应电流相互作用产生的,设旋转磁场每极的磁通量用Φ表示,它等于气隙中磁感应强度平均值与每极面积的乘积。
Φ表示了旋转磁场的强度。
设转子电流用I2表示。
根据电磁力定律,电磁转矩T em应与Φ成正比、与I2也成正比,即T em∝Φ·I2。
此外转子绕组是一个感性电路,转子电流I2滞后于感应电动势E2,它们之间的相位差角是。
考虑到电动机的电磁转矩对外做机械功,与有功功率相对应。
因此电磁转矩T em还与转子电路的功率因数cos有关,即与转子电流的有功分量I2cos(与E2同相位的电流分量)成正比。
总结以上分析,可列出异步电动机的电磁转矩方程式中KT是一个与电动机本身结构有关的系数。
该公式是分析异步电动机转矩特性的重要依据。
2、转矩特性电磁转矩与转差率之间的关系T em=(S)称为电动机的转矩特性。
可以推得式中KT’、转子电阻R2、转子不动时的感抗X20都是常数,且X20远大于R2。
由于上式用电机定、转子绕组中的电阻、电抗等参数反映电磁转矩T em和转差率S之间的关系,所以上式又称之为电磁转矩的参数表达式。
由转矩的表达式(4-5)可知,转差率一定时,电磁转矩与外加电压的平方成正比,即T em∝U12。
因此,电源电压有效值的微小变动,将会引起转矩的很大变化。
当电源电压U1为定值时,电磁转矩T em是转差率S的单值函数。
图4-13画出了异步电动机的转矩特性曲线。
二、三相异步电动机的机械特性当电源电压U1和转子电路参数为定值时,转速n和电磁转矩T的关系n=f(T)称为三相异步电动机的机械特性。
机械特性曲线可直接从转矩特性曲线变换获得。
将图4-15中的转矩特性曲线顺时针转动90°,并将s换成n就可以得到三相异步电动机的机械特性曲线,如图4-16所示。
三相异步电动机的功率和电磁转矩
3I22 R2
1
s
s
R2
3I 2 2
R2 s
(3-32)
电磁功率除去转子绕组上的损耗,就是等效负载电
阻
1 s
s
R2上 的损耗,这部分等效损耗实际上是传输给电动
机转轴上的机械功率,用PMEC表示。它是转子绕组中电
流与气隙旋转磁场共同作用产生的电磁转矩,带动转子
P2 PMEC pmec pad
(3-34)
转轴上可输见出异机步械电功动率机的运全行过时程,为从电源输入电功率P1到
P2 P1 ( pCu1 pFe pCu 2 pmec pad ) P1 p
(3-35)
功率关系可用图3.17来表示。从以上功率关系定量分析看出, 异步电动机运行时电磁功率Pem、转子损耗pCu2和机械功率PMEC三 者之间的定量关系是
以转速n旋转所对应的功率
PMEC
Pem
pCu2
3I 2 2
1 s
s
R2
(1
s)Pem
(3-33)
电动机运行时,还存在由于轴承等摩擦产生的机械
损 型电耗机pme的c及pa附d=加(损1~耗3p)ad%。P大N。型电机中pad约为0.5%PN,小
pad才转是子转的轴机上械实功际率输P出M的EC减功去率,机用械P损2表耗示pm。ec和附加损耗
Pem:PCu2:PMEC =1:s:(1-s) 也可写成下列关系式
(3-36)
Pem pcu2 PMEC
p sP
Cu 2
em
PMEC (1 s)Pem
(3-37)
上式表明,当电磁功率一定,转差率s越小,转子铜损耗越小,
三相异步电动机械特性及各种运行状态
n
n0
a1
O
T
-n0
机械功率Pm
第 十 章 异步电动机的电力拖动
(2) 转子反向的反接制动 ——下放重物
① 制动原理
n
定子相序不变,转子 电路串联对称电阻 Rb。 低速提 a 点 惯性 b 点(Tb<TL),升重物
n↓ c 点 ( n = 0,Tc<TL )
n0
a
b
e TL
Oc
1 T
在TL 作用下 M 反向起动
由参数表达式可知,改变定子电压U1、 定子频率f1、极对数p、定子回路电阻 r1和电抗x1、转子回路电阻r2ˊ和电抗 x2ˊ,都可得到不同的人为机械特性。
(1)降低定子电压的人为机械特性
在参数表达式中,保持其它参数不变, 只改变定子电压U1的大小,可得改变 定子电压的人为机械特性。
讨论电压在额定值以下范围调节的人 为特性(为什么?)
Pe = m1—I2'—2 R定2'子+s 发Rb出'<电0功率,向电源回馈电能。
Pm=
(1-s ) ——
轴Pe上<输0入机械功率(位能负载的位能)。
PCu2 = Pe-Pm
|Pe | = |Pm|-PCu2
—— 机械能转换成电能(减去转子铜损耗等)。
第 十 章 异步电动机的电力拖动
制动效果 Rb →下放速度 。
第 十 章 异步电动机的电力拖动
(3) 能耗制动过程 —— 迅速停车 2
① 制动原理
b
n
a1
制动前:特性 1。
制动时:特性 2。
a 点 惯性 b 点 (T<0,制动开始)
O TL
T
n↓ 原点 O (n = 0,T = 0),制动过程结束。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
式中 TL——负载转矩
1
1 s R 3I 2 R2 2 Pem 3I 2 R 2 2 2 s s
电磁功率除去转子绕组上的损耗,就是等效负载电 1 s 阻 s R上的损耗,这部分等效损耗实际上是传输给电动 机转轴上的机械功率,用 PMEC表示。它是转子绕组中电 流与气隙旋转磁场共同作用产生的电磁转矩,带动转子 以转速n旋转所对应的功率 1 s P P p 3I R (1 s) P (3-33) s 电动机运行时,还存在由于轴承等摩擦产生的机械 损耗pmec及附加损耗pad。大型电机中pad约为0.5%PN,小 型电机的pad=(1~3)%PN。 转子的机械功率 PMEC 减去机械损耗 pmec 和附加损耗 pad才是转轴上实际输出的功率,用P2表示。 P2 PMEC pmec pad (3-34) 可见异步电动机运行时,从电源输入电功率P1 到 转轴上输出机械功率的全过程为 P2 P 1 ( pCu1 pFe pCu 2 pmec pad ) P 1 p (3-35)
2
2 MEC em Cu2 2 2 em
功率关系可用图 3.17来表示。从以上功率关系定量分析看出, 异步电动机运行时电磁功率 Pem、转子损耗pCu2和机械功率PMEC三 者之间的定量关系是 Pem:PCu2:PMEC =1:s:(1-s) (3-36) 也可写成下列关系式 (3-37) 上式表明,当电磁功率一定,转差率s越小,转子铜损耗越小, 机械功率越大,效率越高。电动机运行时,若s增大,转子铜耗也 增大,电机易发热,效率降低。
Pem pcu2 PMEC
Cu 2 em
p sP
PMEC (1 s) Pem
图3.17 异步电动机功率流程图
3.6.2 转矩平衡方程式
机械功率PMEC除以轴的角速度 就是电磁转矩,即 P Tem MEC (3-38) 电磁转矩与电磁功率关系为 PMEC PMEC PMEC Pem Tem 2 n 2 n 1 s 1 1(3-39) 60 60 式中 1为同步角速度(用机械角速度表示) 式(3-33)两边同时除以角速度可得出 pmec pad p0 T2 Tem T0 T0 3-40 ( ) 式中 T0——空载转矩,T2——输出转矩 在电力拖动系统中,常可忽略T0,则有 Tem T2 TL
3.6 三相异步电动机的Байду номын сангаас率和电磁转矩
3.6.1 功率平衡方程式 异步电动机的功率关系可用 T型等效电路图来分析。异步电动 机通电运行时,T型等效电路中每个电阻上均产生一定损耗,如: 定子电阻R1产生定子铜损耗 (3-28) 2 pCu1 3I1 R1 励磁电阻Rm产生定子铁损耗 (忽略 )(3-29) 2 p Fe2 pFe pFe 3I m Rm 转子电阻产生转子铜损耗 (3-30) R2 pCu2 3I 2 从而可得三相异步电动机运行时的功率关系如下。 电源输入电功率除去定子铜损耗和铁损耗便是定子传递给转子 回路的电磁功率, (3-31) Pem P 1 pCu1 p Fe 电磁功率又等于等效电路转子回路全部电阻上的损耗,即 (3-32)