MATLAB第六章simulink仿真答案
控制系统仿真matlab第六章习题答案汇总
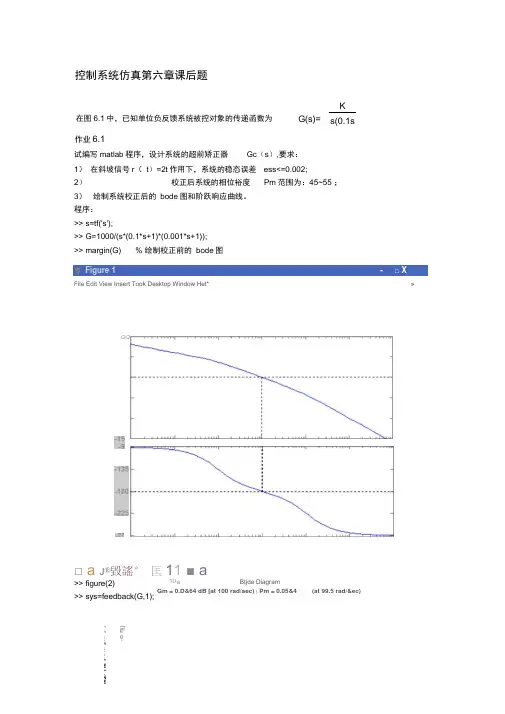
控制系统仿真第六章课后题作业6.1试编写matlab 程序,设计系统的超前矫正器 Gc (s ),要求:1) 在斜坡信号r ( t )=2t 作用下,系统的稳态误差 ess<=0.002;2)校正后系统的相位裕度 Pm 范围为:45~55 ; 3) 绘制系统校正后的 bode 图和阶跃响应曲线。
程序:>> s=tf('s');>> G=1000/(s*(0.1*s+1)*(0.001*s+1));>> margin(G)% 绘制校正前的 bode 图 专 Figure 1 - □ X File Edit View Insert Took Desktop Window Het* »□ a J ®毀謠° 匡11 ■ a >> figure(2)>> sys=feedback(G,1); 在图6.1中,已知单位负反馈系统被控对象的传递函数为G(s)= Ks(0.1s 1)(0.0QQo oBtjde Diagram Gm = 0.D&64 dB [at 100 rad/aec) ( Pm = 0.05&4 (at 99.5 rad/&ec)flu o-5 5 mE mprl 左一6『左 a 10>> step(sys) %绘制校正前的单位阶跃响应曲线Figure 2File Edit 过ew Insert Tools Window Help□已鸟|罠4紗®悬乙| 口目| ■回Step Response1.3>> [Gm,Pm]=margin(G); %该句值计算bode图的增益裕量Gm和相位裕量Pm >> [mag,phase,w]=bode(G); %该句只计算bode图上多个频率点w对应的幅值和相位>> QWPm=50; %取矫正后的相位为50>> Flm=QWPm-Pm+5;>> Flm=Flm*pi/180;>> alfa=(1-si n(FIm))/(1+si n( FIm));>> adb=20*log10(mag);>> am=10*log10(alfa);>> wc=spli ne(adb,w,am);>> T=1/(wc*sqrt(alfa));>> alfat=alfa*T;>> Gc=tf([T 1],[alfat 1]) %校正器的传递函数Tran sfer function:0.01794 s + 1Time 330.00179 s + 1>> figure(3)>> margin(Gc*G) %系统矫正后的bode图Ffgure 3Filt gdit yisw ifisert Hcdt Mfimdcw title】I ■回Bode DiagramGm = 17.6 dB (st 69B rad/sec) s Pm = 4S.2 deg (at 176 rad/sec)"I 0 0 N -- 1 1 I I I ! 1 ! | ! ■' I I ' ' I J I I ........... | I I « i i i | i | i f ■ J !!|!|>> figure(4)>> step(feedback(Gc*G ,1)) % 校正后的单位阶跃响应曲线Figure 4n xl Fie Edit 辺足w Insert Tools Desktop Window HelpO t3 J -S □ S ■ Q1010°ID1 1 孑10Frequency (r&fh'see)作业6.2在图6.1中,已知单位负反馈系统被控对象的传递函数为试编写matlab 程序,设计系统的滞后校正器 Gc ( s ),要求:1) 在斜坡信号r(t)=t 作用下,系统的稳态误差ess 乞0.01 ; 2) 校正后系统的相位裕度 Pm 范围为:40~50 ;3) 绘制系统矫正前后的 bode 图和阶跃响应曲线。
《MATLAB及Simulink应用》实验指导书答案
《MATLAB及应用》实验指导书班级:姓名:学号:总评成绩:汽车工程系电测与汽车数字应用中心目录实验04051001 MATLAB语言基础 (1)实验04051002 MATLAB科学计算及绘图 (5)实验04051003 MATLAB综合实例编程 (7)实验04051001 MATLAB 语言基础1实验目的1) 熟悉MATLAB 的运行环境 2) 掌握MATLAB 的矩阵和数组的运算 3) 掌握MATLAB 符号表达式的创建 4) 熟悉符号方程的求解2实验内容说明:从下面的题目、第1~4章课后习题中任选10题,学号为奇数的选择奇数号题,学号为偶数的选择偶数号题,并在答案之前标注题目来源,例如“课本第1章题2”、“指导书题3”等。
可以采用notebook 格式输出结果(关于notebook 请查阅其他参考资料,或上网搜索) 例如:课本第4章题1.一个半径为r 的求体积V 和表面积A 分别为:334r V π=、24r A π= a.给出以下程序的伪代码描述:计算当30≤≤r 米时的V 和A ,并同时绘制V 相对于A 的图形。
b.编写和运行部分a 中所描述的程序。
解:clc,clear; r=0:0.1:3; V=4/3*pi*r.^3; A=4*pi*r.^2; plot(A,V);grid on; xlabel('Surface Area'); ylabel('Volume');1.在一个已知的测量矩阵T(100×100)中,删除整行全为0的行,删除整列内容全为0的整列(判断某列元素是否为0方法:检查T(: , i) .* (T(: , j))是否为0)。
2.假设汽车系在下列各年度的人口统计如表所示试用一个二维矩阵STU表示上述数据,并请计算出下列各数值:(1)汽车系在2002~20XX年之间的每年平均新生、毕业生人数。
(2)5年来汽车系共有多少毕业生?(3)在哪几年,新生数目比毕业生多?(4)5年来每年的毕业生对新生的比例平均值为何?3.完成下列矩阵运算:(1) 使用randn 产生一个(10×10)的矩阵A(2) 计算B=(A+A ’)/2。
第六章SIMULINK仿真基础
SIMULINK仿真基础
2013-9-15
本部分内容
6.1 6.2 6.3 6.4 6.5 SIMULINK简介 Simulink模块的操作 SIMULINK仿真的运行 Simpowersystems及其应用 子系统的创建和封装(补充)
引言
在工程实际中,控制系统的结构往往很复杂,如果不借助
Solver options(仿真算法选择): 定步长支持的算法可在Fixed step size编辑框中指定步 长或选择auto,离散系统一般默认地选择定步长算法, 在实时控制中则必须选用定步长算法; 变步长支持的算法,对于连续系统仿真一般选择ode45 (四/五阶龙格-库塔法),步长范围使用auto项。
即
示波器:显示在仿真过程产生的信号波形。双击 该图标,弹出示波器窗如右图所示:
打开示波器属 性对话框
设置为浮动示波 器 把当前轴的设置 保存为该示波器 的缺省设置
分别管理X-Y、X 和Y轴向变焦
取当前窗中信号 最大、最小值为 纵坐标的上下限
示波器属性对话框
设置Y轴个数 设置显示的时间范围 选择轴的标注方法 确定显示频度(每隔n-1个数 据 点 显 示 一 次 ) 确定显示点的时间间隔(缺省 为 0 表 示 连 续 显 示 )
Discrete State-Space:离散状态空间系统模型
Discrete Transfer-Fcn:离散传递函数模型
First-Order Hold:一阶采样和保持器 Zero-Order Hold:零阶采样和保持器
Unit Delay:一个采样周期的延时
3、Function&Tables(函数和平台模块) --------function.mdl
电力系统的MATLABSIMULINK仿真与应用第6章
第6章 电力系统稳态与暂态仿真
6.1.5 LTI视窗
打开“LTI视窗”窗口如图6-6所示。该窗口中含有以下 内容: (1) “系统输入”(System inputs)列表框:列出电路状态 空间模型中的输入变量,选择需要用到LTI视窗的输入变量。 (2) “系统输出”(System outputs)列表框:列出电路状态 空间模型中的输出变量,选择需要用到LTI视窗的输出变量。 (3) “打开新的LTI视窗”(Open New LTI Viewer)按键: 产生状态空间模型并打开选中的输入和输出变量的LTI视窗。 (4) “打开当前LTI视窗”(Open in current LTI Viewer)按 键:产生状态空间模型并将选中的输入和输出变量叠加到当
(2) 改变仿真初始状态; (3) 进行潮流计算并对包含三相电机的电路进行初始化
设置;
(4) 显示阻抗的依频特性图;
第6章 电力系统稳态与暂态仿真
(5) 显示FFT分析结果;
(6) 生成状态—空间模型并打开“线性时不变系 统”(LTI)时域和频域的视窗界面; (7) 生成报表,该报表中包含测量模块、电源、非线性 模块和电路状态变量的稳态值,并以后缀名.rep保存; (8) 设计饱和变压器模块的磁滞特性。 6.1.1 主窗口功能简介 MATLAB提供的Powergui模块在SimPowerSystems库中, 图标如图6-1所示。
第6章 电力系统稳态口
第6章 电力系统稳态与暂态仿真
(3) “节点类型”(Bus type)下拉框:选择节点类型。对
于“PV节点”(P&V Generator),可以设置电机的端口电压 和有功功率;对于“PQ节点”(P&Q Generator),可以设置 电机的有功和无功功率;对于“平衡节点”(Swing Bus), 可以设置终端电压UAN的有效值和相角,同时需要对有功 功率进行预估。 如果选择了非同步电机模块,则仅需要输入电机的机械 功率;如果选择了三相动态负荷模块,则需要设置该负荷消 耗的有功和无功功率。 (4) “终端电压UAB”(Terminal voltage UAB)文本框:对 选中电机的输出线电压进行设置(单位:V)。
第六章 Simulink

From File参数设置
传递函数(Transfer function) 参数设置
Numerator为分子多项式系数 Denominator为分母多项式系数
传递函数模块参数设置
示波器(Scope) 参数设置
Y坐标变焦 打开参数对话框 X-Y坐标变焦 X坐标变焦
纵坐标的 自动刻度
恢复保存 过的坐标 设置 浮动示波器 把当前的 坐标设置 保存
点击新建模型窗
Simulink库浏览器
一个例子:建构脉冲输出模型
一个例子:建构脉冲输出模型
2. 建构模型。 (1) 打开函数库的Sources模块库,选择信号源。 (2) 打开函数库的Sinks模块库,将scope模块拖到模 型建构窗口。 (3) 连接两个模块。 (4) 调整模块参数。
一个例子:建构脉冲输出模型
运用基本命令构建模型
(2) 信号线操作:
连接模块。 移动线段。 分割线段。 分支线段。
运用基本命令构建模型
(3)对模型的其他操作
模块参数的改变。 插入模块。 信号线标识。 分离模块。 复原操作。 对模型的注释。
常用的Source库信源模块
名称 功能 说明
Clock
(连续)仿真时 钟
输出每个仿真步 点的时刻
Zero-Order Hold
First-Order Hold Unit Delay
零阶保持器
一阶保持器 采样保持,延迟一个周期
正弦信号参数设置
Amplitude为正弦幅值(以A表 示) Bias为幅值偏移值 (以B表示) Frequency为正弦频率 (以w表 示) Phase为初始相角 (以p表示) Sample time为采样时间 正弦信号可表示为 A*sin(wt+p)+B
中南大学matlab课后答案-第六章
实验指导二1,(1)>> A=[1/2,1/3,1/4;1/3,1/4,1/5;1/4,1/5,1/6];B=[,,]';x=A\B (2)>> A=[1/2,1/3,1/4;1/3,1/4,1/5;1/4,1/5,1/6];B=[,,]';x=A\B (3)>> cond(A)2,(1)建立函数文件,命令如下;Function fx=funx(x)fx=x^41+x^3+1;$调用fzero函数求根,命令如下;>> z=fzero(@funx,-1)(2) 建立函数文件,命令如下;Function fx=sin(x)fx=x-(sin(x))/x;调用fzero函数求根,命令如下;>> z=fzero(@sin,(3) 建立函数文件,命令如下;function q=myfun(p)x=p(1);、y=p(2);z=p(3);q(1)=sin(x)+y^2+log(z)-7;q(2)=3*x+2^y-z^3+1;q(3)=x+y+z-5;调用fsolve函数求根,命令如下;>> options=optimset('Display','off');x=fsolve(@myfun,[1,1,1]',options) 3,(1) 建立函数文件,命令如下;function yp=funt(t,y)>yp=-y*+sin(10*t));求微分方程,程序如下:>> t0=0;tf=5;y0=1;[t,y]=ode23(@funt,[t0,tf],y0)(2) 建立函数文件,命令如下;function yp=funr(t,y)yp=cos(t)-(y)/(1+t^2);求微分方程,程序如下:>> t0=0;tf=5;y0=1;[t,y]=ode23(@funr,[t0,tf],y0)4,建立函数文件命令如下:{function fx=mymax(x)fx=-1*(1+x^2)/(1+x^4);求最大值,程序如下:>> [x,y]=fminbnd(@mymax,0,2)5,编写目标函数M文件,命令如下:function f=fop(x)f=-1*(x(1)^(1/2)+x(2)^(1/2)+x(3)^(1/2)+x(4)^(1/2));设定约束条件,并调用fmincon函数求解此约束最优化问题,程序如下:>>x0=[200,200,200,200];%A=[1,0,0,0;,1,0,0;,,1,0;,,,1];b=[400,440,484,];Ib=[0,0,0,0];options=optimset('Display','off');[x,y]=fmincon(@fop,x0,A,b,[],[],Ib,[],[],options)思考练习1,(1)矩阵求逆:>> A=[2,3,5;3,7,4;1,-7,1];b=[10,3,5]';x=inv(A)*b矩阵除法:>> A=[2,3,5;3,7,4;1,-7,1];b=[10,3,5]';x=A\b!矩阵分解:>> A=[2,3,5;3,7,4;1,-7,1];b=[10,3,5]';[L,U]=lu(A);x=U\(L\b) (2)矩阵求逆:>>A=[6,5,-2,5;9,-1,4,-1;3,4,2,-2;3,-9,0,2];b=[-4,13,1,11]';x=inv(A)*b矩阵除法:>>A=[6,5,-2,5;9,-1,4,-1;3,4,2,-2;3,-9,0,2];b=[-4,13,1,11]';x=A\b矩阵分解:>> A=[6,5,-2,5;9,-1,4,-1;3,4,2,-2;3,-9,0,2];b=[-4,13,1,11]'; [L,U]=lu(A);x=U\(L\b)2,(1)建立函数文件,命令如下:function fx=fun1(x)fx=3*x+sin(x)-exp(x);调用fzero函数求根,命令如下;>> y=fzero(@fun1,、(2) 建立函数文件,命令如下:function fx=fun2(x)fx=1-(1/x)+5;调用fzero函数求根,命令如下;>> y=fzero(@fun2,1)(3) 建立函数文件,命令如下;function q=fun3(p)x=p(1);y=p(2);q(1)=x^2+y^2-9;'q(2)=x+y-1;调用fsolve函数求根,命令如下;>> options=optimset('Display','off');x=fsolve(@fun3,[1,1]',options) 3,(1)建立函数文件,命令如下:function ydot=fun5(t,y)ydot(1)=(2-3*y(2)-2*t*y(1))/(1+t^2);ydot(2)=y(1);ydot=ydot';求解微分方程,命令如下:'>> t0=0;tf=5;x0=[0,1];[t,y]=ode45(@fun5,[t0,tf],x0);[t,y](2) (1)建立函数文件,命令如下:function ydot=fun6(t,y)ydot(1)=cos(t)+(5*y(1)*cos(2*t))/(t+1)^2-y(2)-y(3)/(3+sin(t)); ydot(2)=y(1);ydot(3)=y(2);ydot=ydot';求解微分方程,命令如下:>> t0=0;tf=5;x0=[0,1];[t,y]=ode45(@fun5,[t0,tf],x0);[t,y]4,】建立函数文件命令如下:function fx=max(x)fx=-1*(sin(x)+cos(x^2));求最大值,程序如下:>> [x,y]=fminbnd(@mymax,0,pi)5,编写目标函数M文件,命令如下:function f=topm(x)f=-1*x*(3-2*x)^2;设定约束条件,并调用fmincon函数求解此约束最优化问题,程序如下:>>x0=[0];A=[1];b=[];Ib=[0];options=optimset('Display','off');[x,y]=fminco n(@top,x0,A,b,[],[],Ib,[],[],options)。
MATLAB基础及其应用教程-周开利-邓春晖课后答案 第六章
第6章习题解答1. 在命令窗口中输入,一次只能执行一行命令,脚本文件是命令的集中,只需输入脚本文件名,就可以按顺序一次执行所有命令。
2.脚本文件是命令的集中,只需输入脚本文件名,就可以一次执行所有命令,没有输入参数,没有输出参数。
文件名可任意取,只需符合变量的定义要求即可。
脚本文件中生成的变量是全局变量。
函数文件可以接受参数,也可以返回参数,一般需要由其他语句调用。
首行语句必须以function开始,有函数名,文件名必须与函数名一致。
函数空间中生成的变量是局部变量。
3.function result=project1(year)if mod(year,400)==0 || (mod(year,4)==0 && mod(year,100)~=0)result='是闰年';elseresult='不是闰年';end4.function min=comp(x1,x2)min=x1;if x1>x2min=x2;end5.(1)在命令窗口输入:k=0;for i=-1000:1000;k=k+1;end;k 即可得出:2001步。
(2)方法同上,10步6.(1)循环进行的条件是var不是10的倍数,循环结束时,var必是10的倍数,即10(2)每次循环的结果是:4,16,256,此时,不满足循环条件而退出循环,即var为256(3)循环条件是var>100,而var的值为3,不满足条件,循环不执行,所以var值不变。
7.方法1:clear;A=[1 2 3;4 5 6];fid=fopen('c:\a1.txt','wt');fprintf(fid,'%d ',A(1,:));fprintf(fid,'\n');fprintf(fid,'%d ',A(2,:));fclose(fid);方法2:clear;a=[1 2];A=[1 2 3 4 5 6]B=reshape(A,2,2) dlmwrite('c:\a2.txt',B)。
电力系统的MATLAB_SIMULINK仿真与应用6 电力系统稳态与暂态仿真(教学材料)
第6章 电力系统稳态与暂态仿真
4) “LTI视窗”(Use LTI Viewer)按键 打开窗口,使用“控制系统工具箱”(Control System Toolbox)的LTI视窗。 5) “阻抗依频特性测量”(Impedance vs. Frequency Measurement)按键 打开窗口,如果模型文件中含阻抗测量模块,该窗口中 将显示阻抗依频特性图。 6) “FFT分析”(FFT Analysis)按键 打开FFT分析窗口。 7) “报表生成”(Generate Report)按键 打开窗口,产生稳态计算的报表。
(1) 显示测量电压、测量电流和所有状态变量的稳态值; (2) 改变仿真初始状态; (3) 进行潮流计算并对包含三相电机的电路进行初始化 设置; (4) 显示阻抗的依频特性图;
第6章 电力系统稳态与暂态仿真
(5) 显示FFT分析结果; (6) 生成状态—空间模型并打开“线性时不变系 统”(LTI)时域和频域的视窗界面; (7) 生成报表,该报表中包含测量模块、电源、非线性 模块和电路状态变量的稳态值,并以后缀名.rep保存; (8) 设计饱和变压器模块的磁滞特性。 6.1.1 主窗口功能简介 MATLAB提供的Powergui模块在SimPowerSystems库中, 图标如图6-1所示。
第6章 电力系统稳态与暂态仿真
第6章 电力系统稳态与暂态仿真
6.1 Powergui模块 6.2 电力系统稳态仿真 6.3 电力系统电磁暂态仿真 6.4 电力系统机电暂态仿真 习题
第6章 电力系统稳态与暂态仿真
6.1 Powergui模块
Powergui模块为电力系统稳态与暂态仿真提供了有用的 图形用户分析界面。通过Powergui模块,可以对系统进行可 变步长连续系统仿真、定步长离散系统仿真和相量法仿真, 并实现以下功能:
【MATLAB课件】第六章simulink仿真
5
MATLAB语言
6.2.2建模与仿真 6.2.2建模与仿真
建模仿真的一般过程是: 建模仿真的一般过程是: 打开一个空白的编辑窗口; 打开一个空白的编辑窗口; 将模块库中模块复制到编辑窗口里, 将模块库中模块复制到编辑窗口里,并依照要求修改编辑 窗口中模块的参数; 窗按要求连接起来; 用菜单选择或命令窗口键入命令进行仿真分析, 用菜单选择或命令窗口键入命令进行仿真分析,在仿真的 同时,可以观察仿真结果,如果发现有不正确的地方, 同时,可以观察仿真结果,如果发现有不正确的地方,可 以停止仿真,对参数进行修正; 以停止仿真,对参数进行修正; 如果对结果满意,可以将模型保存。 如果对结果满意,可以将模型保存。
15
MATLAB语言
二、修饰模块 1.调整模块的大小 1.调整模块的大小 2.调制模块位置 2.调制模块位置 3.调制模块方向 3.调制模块方向 Format菜单→ Block:旋转180° 旋转180 Format菜单→Flip Block:旋转180° 菜单 Format菜单→ Block:顺时针旋转90° 顺时针旋转90 Format菜单→Rotate Block:顺时针旋转90° 菜单 4.调整模块颜色和效果 4.调整模块颜色和效果 Format菜单→ color:修改模块的前景颜色 Format菜单→Foreground color:修改模块的前景颜色 菜单 Format菜单→Background color:修改模块的背景颜色 Format菜单→ color:修改模块的背景颜色 菜单 Format菜单→ color:修改模型的背景颜色 Format菜单→Screen color:修改模型的背景颜色 菜单 Format菜单→ shadow:给模块添加阴影 Format菜单→Show drop shadow:给模块添加阴影 菜单
Matlab第六章 Simulink数字电路仿真
武汉大学物理科学与技术学院微电子系 常胜
§6.2 时序逻辑电路的仿真
时序逻辑电路与组合逻辑电路相比的最大区别是此刻的 输出不仅与此刻的输入有关,还和以前的状态有关。因 此,在硬件结构上需引入触发器这一能起到“记忆”作 用的元件。
武汉大学物理科学与技术学院微电子系 常胜
武汉大学物理科学与技术学院微电子系 常胜
8421码子系统
武汉大学物理科学与技术学院微电子系 常胜
加法计数器系统
武汉大学物理科学与技术学院微电子系 常胜
武汉大学物理科学与技术学院微电子系 常胜
习题: 使用Combinatoinal Logic模块完成对 以下函数功能的建模和仿真:
X = AB + BC + AC
武汉大学物理科学与技术学院微电子系 常胜
武汉大学物理科学与技术学院微电子系 常胜
武汉大学物理科学与技术学院微电子系 常胜
译码器:使用combinational logic模块 ex6_2_2
武汉大学物理科学与技术学院微电子系 常胜
武汉大学物理科学与技术学院微电子系 常胜
武汉大学物理科学与技术学院微电子系 常胜
Y = ( A + B)(B + C)(C + A)
Z1=X+Y Z2=XY
武汉大学物理科学与技术学院微电子系 常胜
习题: 采用触发器(D or J-K)构建10分频器, 完成对输入时钟10分频的功能。 要求:1、思路 2、逻辑表达式 3、模型图和输出波型 4、分析和总结
武汉大学物理科学与技术学院微电子系 常胜
武汉大学物理科学与技术学院微电子系 常胜
武汉大学物理科学与技术学院微电子系 常胜
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四 SIMULINK 仿真实验
一、 实验目的
1. 学习SIMULINK 的实验环境使用。
2. 掌握SIMULINK 进行结构图仿真的方法。
二、 实验内容
1.控制系统结构图仿真 给定被控对象)1(10)(+=s s s G ,控制器1
11.0145.0)(++=s s s D ,按以下两种情况设计SIMULINK 仿真结构图(给定信号是单位阶跃信号)。
(1) 无控制器时被控对象单位负反馈。
(2) 控制器与被控对象串连接成单位负反馈。
给定的仿真参数:
(1) 信号源参数设置: 阶跃信号(Step )的Step time 设为0秒。
(2)仿真参数设置: 仿真时间 0~10秒,求解器选定步长(Fixed-step)的ode5,仿真步长(Fixed step size )设为0.02秒。
实验要求:
(1) 在SIMULINK 中对设计的结构图进行仿真,观察输入信号,输出信号和控制信号。
(1) 记录保存两种情况下的响应波形(适当调整时间轴和纵轴坐标,使图形显示适中,同时在图中求出系统的超调和调节时间(按2%的误差带)。
0123456
78910
00.2
0.4
0.6
0.8
1
1.21.4
时间 (seconds)d a t a
时序图:
0123456
7891000.2
0.4
0.6
0.8
11.2
1.4
1.6
1.8
时间 (seconds)
d a t a
时序图:
2.动态系统微分方程仿真
在SIMULINK 中求解下列二阶微分方程代表的动态系统在阶跃信号作用下的状态响应。
给定的仿真参数: (1) 信号源参数设置:阶跃信号(Step )的Step time 设为0秒。
(2) 仿真参数设置:仿真时间 0~8秒,求解器选变步长
(Variable-step)的ode45,最大仿真步长(Max step size )设为0.01秒。
实验要求:
(1) 据微分方程构造结构图。
(2) 结构图仿真。
a) 零状态仿真:x 1=0,x 2=0,
b) 非零状态仿真:x 1=1,x 2=-1,
c) 记录保存两种情况下的响应波形(适当调整时间轴和纵轴坐
标,使图形显示适中)。
1
22122110)
(1,||210x y t u u x x x x
x x
==++--==。