Mazak伺服主轴定向参数调整
伺服驱动器参数设置方法
伺服驱动器参数设置方法
1. 前期准备
根据伺服驱动器使用说明书来确认系统参数的设置范围,同时要了解所需参数的具体名称和作用。
在设置参数前,先停止伺服系统的运转。
2. 主伺服参数设置
主伺服参数指防护、速度、加速度等参数。
设置前,先按照使用说明书的要求选择相应的参数。
然后进行参数设置。
3. PID参数设置
PID参数设置包括比例系数、积分时间和微分时间三个参数。
一般情况下,这三个参数是配套使用的。
一般情况下,这三个参数都是需要根据实际情况进行调整的。
在设定前,先根据使用说明书选择相应的参数,然后调整PID参数,直到达到理想的运动效果。
4. 位置误差调整
基础参数调整完成后,要进行位置误差调整。
这时,可以手动转动伺服电机,观察位置误差变化。
这个过程中,要根据速度的变化,对位置误差进行调整,直到
达到预期效果。
5. 整机参数调整
完成单个电机的参数设定后,还需要对整个伺服系统进行参数调整。
整机参数包括系统响应速度、整机加速度等。
通过调整整机参数,可以使整个伺服系统的运动更加顺畅。
6. 参数测试
参数设置完成后,还需要对其进行测试,以验证是否满足了伺服系统的设计要求。
在测试过程中,可以根据需要逐步调整参数,以达到最佳效果。
数控机床伺服参数调整方法

数控机床伺服参数调整方法数控机床伺服参数调整是指根据加工需求和机床运行情况,调整伺服系统的参数,以达到更好的加工效果和稳定性。
下面将介绍一些数控机床伺服参数调整的方法。
需要了解数控机床伺服系统的参数。
数控机床伺服系统通常包括位置控制器、伺服驱动器和伺服电机,每个部分都有一些关键参数。
位置控制器的参数包括位置环增益、速度环增益和加速度环增益;伺服驱动器的参数包括比例增益、积分时间和死区补偿;伺服电机的参数包括电机惯量、电机转矩和电机速度。
根据加工需求和机床运行情况来选择合适的参数。
加工需求包括加工件的大小、形状、材质和精度要求等,机床运行情况包括加工件的负载、加工速度和加工方式。
根据这些因素,将合适的参数值输入到机床控制软件中。
然后,通过试切来验证参数的合适性。
试切是指根据加工要求,进行一次小批量的加工测试,以评估加工效果。
在试切过程中,观察加工件的表面质量、尺寸偏差和工具磨损情况等,根据实际情况进行参数的调整,直到达到最佳的加工效果。
接下来,根据机床的反馈信息进行参数优化。
机床的反馈信息可以通过加工过程中的传感器数据获取,例如位置、速度和加速度等。
根据这些信息,可以分析机床的动态特性和稳定性,并通过调整参数来改善机床的性能。
将参数进行记录和保存。
一旦确定了合适的参数,就应该将其记录下来,并保存到机床控制软件中。
这样,在下次加工相同类型的工件时,可以直接使用这些参数,提高加工的一致性和效率。
数控机床伺服参数的调整是一个持续优化的过程。
通过合适的参数选择、试切验证和反馈信息分析,可以不断改进数控机床的加工性能,提高加工的质量和效率。
数控机床伺服参数调整方法
数控机床伺服参数调整方法随着数控技术的不断发展,数控机床在工业生产中的应用越来越广泛。
数控机床伺服系统作为数控机床的核心部件之一,其性能和稳定性直接影响到数控机床的加工精度和效率。
合理调整数控机床伺服系统的参数是提高数控机床加工质量和效率的重要手段之一。
本文将介绍数控机床伺服参数调整的方法,希望能对相关人士有所帮助。
1. 调整前的准备在进行数控机床伺服系统参数调整之前,首先需要对数控机床进行全面的检查和维护。
确保数控机床的各个部件处于正常工作状态,特别是伺服系统的传感器、执行器和控制器等部件要进行细致的检查,发现问题及时进行修理或更换,以确保调整参数时能够得到准确的反馈数据。
在进行参数调整之前,需要对数控机床的加工工艺进行详细的分析和了解,包括加工材料、加工工艺、加工精度要求等,这些信息将直接影响到伺服系统参数的选择和调整。
2. 调整方法(1)速度环参数调整伺服系统的速度环参数直接影响到伺服电机的加减速性能,对于需要进行高速加工的数控机床尤为重要。
速度环参数主要包括速度比例增益、速度积分增益、速度微分增益等。
在调整速度环参数时,可以先将速度比例增益调整到一个适中的数值,然后逐步增加速度积分增益和速度微分增益,直到获得令人满意的响应速度和稳定性。
伺服系统的限位参数可以对伺服电机的运动范围进行限制,避免因误操作或其他原因导致的伺服电机超出规定范围的运动。
在调整限位参数时,需要根据实际工艺要求和数控机床的运动范围进行合理设置,以确保伺服电机在安全范围内工作。
3. 调整后的测试在完成伺服系统参数调整之后,需要进行全面的测试,以确保伺服系统参数调整的效果符合实际工艺需求。
测试内容主要包括加速度、速度、位置控制精度、动态响应速度等方面的测试。
通过测试结果可以评估伺服系统参数调整的效果,如果需要进一步调整,则可以根据测试结果进行调整。
数控机床伺服系统参数调整是一项复杂而又重要的工作,需要经验丰富的技术人员来进行。
Mazak伺服主轴定向参数调整

Mazak 伺服主轴定向参数的调整Mazak立式数控加工中心(VTC-160和VCN-410两种型号)主轴定向后Y轴移动对键块的平行度超过0.1mm后需要对伺服主轴定向参数进行调整。
1、执行主轴定向,按机床面板上MDI键进入MDI模式,在绿色输入框中输入M19,然后按下机床面板上绿色循环启动键。
2、拆除主轴定向键块、对安装基面和键块进行清洁,清洁完毕后重新安装定向键块,注意定向键块安装时刻有A字的面朝向主轴锥孔侧。
3、切换到手动模式(按机床面板上X1000、X100、X10、X1中任意一个键),然后按下主轴旋转按钮,使用按钮来增加主轴转速,接着按下主轴停止按钮。
最后重复第一步执行主轴定向。
4、用磁力表座和杠杆百分表检查主轴定向后Y轴移动对键块的平行度,如果超差,进入下一步参数调整。
5、按屏幕下方左翻页键6、下图中红圈处诊断菜单键进入诊断主画面7、下图中红圈处版本菜单键进入版本画面8、在版本界面,按机床屏幕下方右翻页键9、现在就可以从机床操作面板直接输入密码1131,如下图所示10、输入1131后,按机床操作面板上的“INPUT”11、进入参数画面,按下图的“SPINDLE MONITOR”菜单键,在右侧会多出“参数”菜单12、按“参数”菜单,参数菜单会变成红色,屏幕上就会弹出主轴参数设置框13、使用机床操作面板上的翻页键(上翻页、下翻页)和方向键来移动光标选择参数SP7(VTC-160机型)或SA96(VCN-410B机型)参数。
14、增加当前参数值,则主轴定向逆时针转过一定角度(从电机方向观察),根据具体情况对参数进行更改。
15、关闭系统,等待10秒后开启系统,重复第一步内容执行主轴定向,然后重复第四步检查平行度,如未达到要求范围,请重复以上步骤。
伺服电机的参数调节方法

伺服电机的参数调节方法伺服电机作为一种高精度控制器,其参数的调节方法对其性能具有非常重要的影响。
通过恰当地调节电机的参数,可以使其达到更高的精度和响应速度。
在本文中,我们将介绍伺服电机参数调节的方法。
一、伺服电机参数的意义1. 比例增益(KP)比例增益是电机输出与误差之间的比例系数。
它可以调节电机的灵敏度和控制响应速度。
比例增益越大,控制效果越好,但过大会导致震荡和不稳定。
相反,比例增益过小将导致电机偏差过大,精度和响应速度下降。
2. 积分时间(TI)积分时间是指误差累积对输出的影响时间,是衡量电机回归能力的重要参数。
当电机输出大于误差时,积分时间越长,电机响应越大,误差越小。
相反,积分时间过短会导致电机无法稳定工作。
3. 微分时间(TD)微分时间是误差变化速率对电机输出的影响时间,可以调节电机的“智能度”。
在实际应用中,微分时间通常为0.1倍的积分时间。
当微分时间过大时,将导致电机响应迟缓和不稳定。
二、伺服电机参数的调节方法1. 比例增益(KP)参数调节方法(1)先将积分时间和微分时间调节到最小。
(2)逐渐增加比例增益,直到电机出现震荡或不稳定。
此时再将比例增益减小到震荡停止或不稳定的状态。
(3)再次逐渐增加比例增益,直到电机产生震荡或不稳定,并将比例增益减小到震荡停止或不稳定的状态。
(4)重复步骤(3)直到电机稳定工作。
2. 积分时间(TI)参数调节方法(1)先将比例增益和微分时间调节到最小。
(2)逐渐增加积分时间,直到电机达到最佳位置控制。
(3)增加积分时间将导致大的调节误差,如果电机无法达到最佳位置控制,则缩短积分时间。
(4)重复步骤(3)直到电机达到最佳位置控制。
3. 微分时间(TD)参数调节方法(1)先将比例增益和积分时间调节到最小。
(2)逐渐增加微分时间,直到电机达到最佳位置控制。
(3)如果微分时间太长,则会导致电机对小的误差变化过于敏感,从而降低稳定性。
(4)重复步骤(3)直到电机达到最佳位置控制。
有关于发那科主轴定位参数设定
(No:5312)411 伺服报警:n轴超差N轴(攻丝轴1~4)运动时的误差超过设定值(No:5313或5314)413 伺服报警:n轴LSI溢出N轴(攻丝轴1~4)的误差计数器的值超过-231~231,请修改有关位置环的参数。
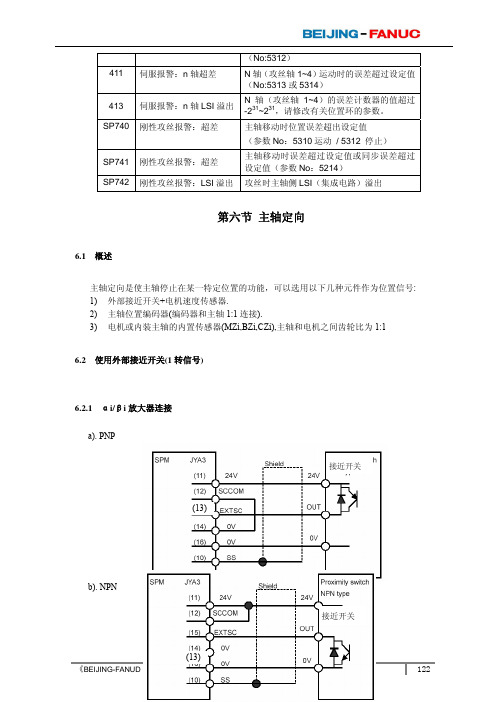
SP740 刚性攻丝报警:超差主轴移动时位置误差超出设定值(参数No:5310运动 / 5312 停止)SP741 刚性攻丝报警:超差主轴移动时误差超过设定值或同步误差超过设定值(参数No:5214)SP742 刚性攻丝报警:LSI溢出攻丝时主轴侧LSI(集成电路)溢出第六节主轴定向6.1 概述主轴定向是使主轴停止在某一特定位置的功能,可以选用以下几种元件作为位置信号:1)外部接近开关+电机速度传感器.2)主轴位置编码器(编码器和主轴1:1连接).3)电机或内装主轴的内置传感器(MZi,BZi,CZi),主轴和电机之间齿轮比为1:16.2 使用外部接近开关(1转信号)6.2.1 αi/βi放大器连接a). PNPb). NPN(13)(13)接近开关接近开关c). 两线NPN6.2.3 参数设定. αi/βi 放大器参数号 设定值 备注4000#0 0/1 主轴和电机的旋转方向相同/相反 4002#3,2,1,00,0,0,1 使用电机的传感器做位置反馈 4004#2 1 使用外部一转信号 4004#3 根据表1设定 外部开关信号类型 4010#2,1,0 0,0,1 设定电机传感器类型 4011#2,1,0 初始化自动设定 电机传感器齿数 4015#0 1 定向有效4056-4059 根据具体配置 电机和主轴的齿轮比 4171-4174 根据具体配置 电机和主轴的齿轮比6.2.4 外部开关类型的参数说明1) 表1,参数4004#3的设定(对于αi/βi 放大器) 开关 检测方式 开关类型 SCCOM 接法(13)设定值 二线 24V(11脚)0 NPN 0V(14脚) 0 常开 PNP 24V(11脚) 1 NPN 0V(14脚) 1 突起 常闭 PNP 24V(11脚) 0 NPN 0V(14脚) 0 常开 PNP 24V(11脚) 1 NPN 0V(14脚) 1 三线凹槽常闭PNP 24V(11脚)接近开关注:检测方式如下图所示:2) 对于主轴电机和主轴之间不是1:1的情况,一定要正确设定齿轮比(参数4056-4059 和4500-4503)。
主轴定向参数设定
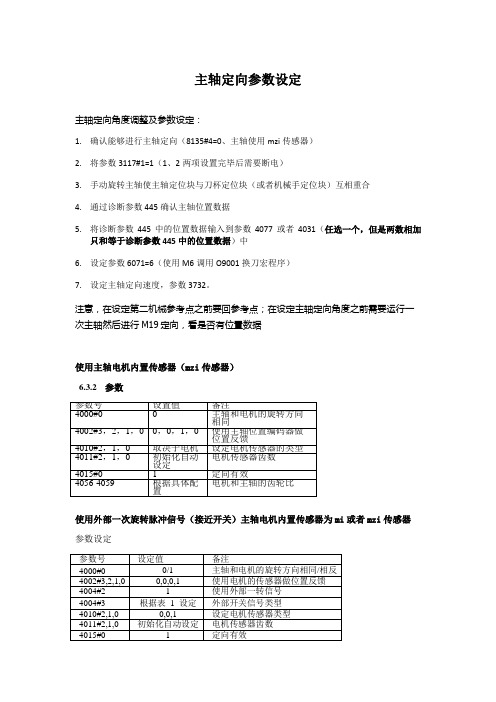
主轴定向参数设定主轴定向角度调整及参数设定:1.确认能够进行主轴定向(8135#4=0、主轴使用mzi传感器)2.将参数3117#1=1(1、2两项设置完毕后需要断电)3.手动旋转主轴使主轴定位块与刀杯定位块(或者机械手定位块)互相重合4.通过诊断参数445确认主轴位置数据5.将诊断参数445中的位置数据输入到参数4077或者4031(任选一个,但是两数相加只和等于诊断参数445中的位置数据)中6.设定参数6071=6(使用M6调用O9001换刀宏程序)7.设定主轴定向速度,参数3732。
注意,在设定第二机械参考点之前要回参考点;在设定主轴定向角度之前需要运行一次主轴然后进行M19定向,看是否有位置数据使用主轴电机内置传感器(mzi传感器)6.3.2参数使用外部一次旋转脉冲信号(接近开关)主轴电机内置传感器为mi或者mzi传感器参数设定4056-4059 根据具体配置电机和主轴的齿轮比4171-4174 根据具体配置电机和主轴的齿轮比外部传感器开关类型的参数说明开关检测方式开关类型SCCOM 接法(13) 设定值二线24V(11 脚) 0突起常开NPN 0V(14 脚) 0 PNP 24V(11 脚) 1三线常闭NPN 0V(14 脚) 1PNP 24V(11 脚) 0凹槽常开NPN 0V(14 脚) 0PNP 24V(11 脚) 1常闭NPN 0V(14 脚) 1PNP 24V(11 脚) 0表1注:检测方式如下图所示:1突起2凹槽对于主轴电机和主轴之间不是1:1的情况,一定要正确设定齿轮比(参数4056-4059和4500-4503)。
根据赛场设备,定向器件为NPN型霍尔元件,主轴为缺口设计,故进行如下操作:1、调整霍尔元件距离,使其与主轴距离在3-5mm,并固定。
2、将霍尔元件插口插到主轴放大器JYA3接口上。
3、进行主轴定向角度调整及参数设定。
4、进行NPN型霍尔元件外部一转信号参数设定,4000#0=0,4002#3.2.1.0=0.0.0.1,4004#2=1,4004#3=1.。
数控机床伺服参数调整方法
数控机床伺服参数调整方法数控机床是一种通过控制系统控制的机床,它的精度和稳定性取决于伺服系统的参数调整。
伺服系统是控制电机转速和位置的关键部件,正确调整伺服系统的参数可以提高机床的加工精度和生产效率。
本文将介绍一种数控机床伺服参数调整方法。
一、伺服系统的参数数控机床的伺服系统有许多参数,常见的有比例增益、积分时间、微分时间和滤波时间等。
比例增益决定了伺服系统的响应速度和稳定性,积分时间和微分时间分别控制了伺服系统的积分和微分作用,滤波时间用于减小伺服系统的噪声。
不同的机床对参数的要求可能不同,因此需要根据具体机床的要求进行调整。
二、参数调整方法1. 比例增益的调整比例增益是伺服系统的一个重要参数,它决定了伺服系统的响应速度和稳定性。
一般来说,较大的比例增益可以提高系统的动态性能,但过大的比例增益会导致系统震荡和不稳定。
调整比例增益需要在性能和稳定性之间取得平衡。
具体的调整方法如下:(1)增加比例增益,观察系统的响应速度和稳定性,如果出现震荡现象或者系统变得不稳定,说明比例增益过大,需要适当降低。
2. 积分时间的调整(1)增加积分时间,观察系统的稳态误差,如果稳态误差减小,但超调量增大,说明积分时间过大,需要适当减小。
(1)增加滤波时间,观察系统的响应速度和抖动情况,如果系统的响应速度变慢,说明滤波时间过大,需要适当减小。
三、结论通过调整伺服系统的参数,可以有效提高数控机床的加工精度和生产效率。
在进行参数调整时,需要在性能和稳定性之间取得平衡,根据具体机床的要求进行调整。
调整伺服系统参数需要进行逐步试验,观察系统的响应速度和稳定性,在实际加工中进行实验验证,以获得最佳的参数设置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Mazak 伺服主轴定向参数的调整
Mazak立式数控加工中心(VTC-160和VCN-410两种型号)主轴定向后Y轴移动对键块的平行度超过0.1mm后需要对伺服主轴定向参数进行调整。
1、执行主轴定向,按机床面板上MDI键进入MDI模式,在绿色输入框中输入M19,然后按下机床面板上绿色循环启动键。
2、拆除主轴定向键块、对安装基面和键块进行清洁,清洁完毕后重新安装定向键块,注意定向键块安装时刻有A字的面朝向主轴锥孔侧。
3、切换到手动模式(按机床面板上X1000、X100、X10、X1中任意一个键),然后按下主
轴旋转按钮,使用按钮来增加主轴转速,接着按下主轴停止按钮。
最后重复第一步执行主轴定向。
4、用磁力表座和杠杆百分表检查主轴定向后Y轴移动对键块的平行度,如果超差,进入下一步参数调整。
5、按屏幕下方左翻页键
6、下图中红圈处诊断菜单键进入诊断主画面
7、下图中红圈处版本菜单键进入版本画面
8、在版本界面,按机床屏幕下方右翻页键
9、现在就可以从机床操作面板直接输入密码1131,如下图所示
10、输入1131后,按机床操作面板上的“INPUT”
11、进入参数画面,按下图的“SPINDLE MONITOR”菜单键,在右侧会多出“参数”菜单
12、按“参数”菜单,参数菜单会变成红色,屏幕上就会弹出主轴参数设置框
13、使用机床操作面板上的翻页键(上翻页、下翻页)和方向键来移动光标选择参数SP7(VTC-160机型)或SA96(VCN-410B机型)参数。
14、增加当前参数值,则主轴定向逆时针转过一定角度(从电机方向观察),根据具体情况对参数进行更改。
15、关闭系统,等待10秒后开启系统,重复第一步内容执行主轴定向,然后重复第四步检查平行度,如未达到要求范围,请重复以上步骤。