相电动机点动控制和自锁控制
三相异步电动机点动控制和自锁控制及联锁正反转控制实验报告

三相异步电动机点动控制和自锁控制及联锁正反转控制实验报告图2-5 按钮联锁的正反转控制线路按图2-5接线,实验操作步骤如下:(1) 按控制屏启动按钮,接通三相交流电源;(2) 按正向起动按钮SB1,电动机正向起动,观察电动机的转向及接触器的动作情况。
按停止按钮SB3,使电动机停转;(3) 按反向起动按钮SB2,电动机反向起动,观察电动机的转向及接触器的动作情况。
按停止按钮SB3,使电动机停转。
实验完毕,按控制屏停止按钮,切断实验线路电源。
实验现象:按正向启动按钮SB1,电机正转,接触器KM1工作,按下SB3电机停止运行;按反向启动按钮SB2,电机反转,接触器KM2工作,按下SB3电机停止运行;2. 接触器和按钮双重联锁的正反转控制线路按图2-6接线,经检查无误后,方可进行通电操作。
实验操作步骤如下:图2-6 接触器和按钮双重联锁的正反转控制线路(1) 按控制屏启动按钮,接通三相交流电源。
(2) 按正向起动按钮SB1,电动机正向起动,观察电动机的转向及接触器的动作情况。
按停止按钮SB3,使电动机停转。
(3) 按反向起动按钮SB2,电动机反向起动,观察电动机的转向及接触器的动作情况。
按停止按钮SB3,使电动机停转。
(4) 按正向(或反向)起动按钮,电动机起动后,再去按反向(或正向)起动按钮,观察有何情况发生?(5) 电动机停稳后,同时按正、反向两只起动按钮,观察有何情况发生?(6) 失压与欠压保护按起动按钮SB1(或SB2)电动机起动后,按控制屏停止按钮,断开实验线路三相电源,模拟电动机失压(或零压)状态,观察电动机与接触器的动作情况,随后,再按控制屏上启动按钮,接通三相电源,但不按SB1(或SB2),观察电动机能否自行起动?实验完毕,按控制屏停止按钮,切断实验线路电源。
实验现象:按下SB1,电机正向旋转,KM1正常工作,按下SB3电机停止运行。
按下SB2,电机反向旋转,KM2正常工作,按下SB3电机停止运行。
三相异步电动机点动控制和自锁控制及联锁正反转控制实验报告

1.接线时合理安排挂箱位置,接线要求牢靠、整齐、安全可靠;
2.操作时要胆大、心细、谨慎,不许用手触及各电器元件的导电部分及电动机的转动部分,以免触电及意外损伤;
3.通电观察继电器动作时要注意安全,防止碰触带电部位。
六、思考题
1.试比较点动控制线路与自锁控制线路从结构上主要有什么区别?从功能上看主要区别是什么?
3.在主回路中,熔断器和热继电器热元件可否少用一只或两只?熔断器和热继电器两者可否只采用其中一种就可起到短路和过载保护作用?为什么?
为了电机的安全,熔断器和热继电器热元件不能少用。
熔断器:
熔断器(fuse)是指当电流超过规定值时,以本身产生的热量使熔体熔断,断开电路的一种电器。熔断器广泛应用于高低压配电系统和控制系统以及用电设备中,作为短路和过电流的保护器。
2. 接触器和按钮双重联锁的正反转控制线路
按图2-6接线,经检查无误后,方可进行通电操作。实验操作步骤如下:
图2-6 接触器和按钮双重联锁的正反转控制线路
(1) 按控制屏启动按钮,接通三相交流电源。
(2) 按正向起动按钮SB1,电动机正向起动,观察电动机的转向及接触器的动作情况。按停止按钮SB3,使电动机停转。
(3)按下SB2,电机反向旋转,KM2正常工作,按下SB3电机停止运行。
(4)先按下SB1,电机正向旋转,之后直接按下SB2,电机可直接切换到反转运行状态。
(5)同时按SB1和SB2电机不会运行。
(6)按起动按钮 SB1且电动机失压,接触器电磁吸力急剧下降或消失,衔铁释放,主触点与自锁出点断开,电动机停止运转。再按控制屏上启动按钮,接通三相电源。电动机不会自行启动运转。
Q1为总电源的三相闸刀开关,对整个系统的供电控制,起隔离作用;
电器原理实验一——三相异步电机的点动、自锁与正反转控制

课程名称:电器原理指导老师:_ 孙丹_______成绩:__________________ 实验名称:三相异步电机的点动、自锁与正反转控制实验类型:__同组学生姓名:一、实验目的和要求(必填)二、实验内容和原理(必填)三、主要仪器设备(必填)四、操作方法和实验步骤五、实验数据记录和处理六、实验结果与分析(必填)七、讨论、心得一、实验目的和要求1.通过对三相异步电动机点动控制和自锁控制线路的实际安装接线,掌握由电气原理图变换成安装接线图的知识;2.通过实验进一步加深理解点动控制和自锁控制的特点以及在机床控制中的应用。
3.掌握三相异步电动机正反转的原理和方法,加深对电气控制系统各种保护、自锁、互锁等环节的理解;4.掌握接触器联锁正反转、按钮联锁正反转控制线路的不同接法,并熟悉在操作过程中有哪些不同之处;5.通过对三相鼠笼式异步电动机延时正反转控制线路的安装接线,掌握由电气原理图接成实际操作电路的方法。
6.学会分析、排除继电--接触控制线路故障的方法.二、实验内容和原理1.继电接触控制在各类生产机械中获得广泛的应用,交流电动机继电接触控制电路的主要设备是交流接触器,其主要构造为:(1) 电磁系统─铁心、吸引线圈和短路环;(2) 触头系统─主触头和辅助触头,还可按吸引线圈得电前后触头的动作状态,分动合(常开)、动断(常闭)两类;(3) 消弧系统─在切断大电流的触头上装有灭弧罩以迅速切断电弧;(4) 接线端子,反作用弹簧等。
2.在控制回路中常采用接触器的辅助触头来实现自锁和互锁控制。
要求接触器线圈得电后能自动保持动作后的状态,这就是自锁,通常用接触器自身的动合触头与起动按钮相并联来实现,以达到电动机的长期运行,这一动合触头称为“自锁触头”。
使两个电器不能同时得电动作的控制,称为互锁控制,如为了避免正、反转两个接触器同时得电而造成三相电源短路事故,必须增设互锁控制环节。
为操作的方便,也为防止因接触器主触头长期大电流的烧蚀而偶发触头粘连后造成的三相电源短路事故,通常在具有正、反转控制的线路中采用既有接触器的动断辅助触头的电气互锁,又有复合按钮机械互锁的双重互锁的控制环节。
三相电动机点动控制和自锁控制
三相电动机点动控制和自锁控制一、说明1.点动控制启动:按下启动按钮SB1,x0动触头闭合,Y3线圈通电,即接触器km4线圈通电。
0.1s后,Y0线圈通电,即接触器KM1线圈通电,电机通过星形连接启动。
按一次SB1,电机将运行一次。
2.自锁控制启动:按启动按钮sb2,x1的动合触点闭合,y3线圈得电,即接触器km4的线圈得电,0.1s后y0线圈得电,即接触器km1的线圈得电,电动机作星形连接启动。
只有按下停止按钮sb3时电机才停止运转。
二、实验面板图三、要求1、在操作箱设计输入输出接线2、编制梯形图程序。
3.打开主机并将程序下载到主机。
4.启动并运行程序,观察实验现象。
5.以书面形式编写PLC接线图,并提交书面梯形图。
试题二三相鼠笼式异步电动机联锁正反转控制一、实验描述启动:按启动按钮sb1,x0的动合触点闭合,y3线圈得电,m0的动合触点也闭合,延时0.1s后y0的线圈得电,电机作星形连接启动,此时电机正转;按启动按钮sb2,x1的动合触点闭合,y3线圈得电,m1的动合触点也闭合,延时0.1s后y0的线圈得电,电机作星形连接启动,此时电机反转。
当电机向前旋转时,反转按钮SB2不工作,只有在按下停止按钮Sb3时,电机才停止工作;当电机反转时,正向旋转按钮SB1不工作,只有在按下停止按钮Sb3时,电机才会停止工作。
2、实验面板图三、要求1.设计操作箱中的输入和输出接线2。
编写梯形图程序。
3、打开主机电源将程序下载到主机中。
4、启动并运行程序观察实验现象。
5、书面写出plc接线图,递交书面梯形图。
三相鼠笼式异步电动机延时正反向控制一、实验说明启动:按下启动按钮SB1,x0动触头闭合,Y3线圈通电,Y0线圈同时通电。
此时,电机向前旋转。
延时3S后,Y0线圈失电,Y1线圈通电。
此时,电机反转;按下启动按钮SB2,X1的动态触点闭合,Y3的线圈通电,同时Y1的线圈通电。
此时电机反转,延时4S,Y1线圈断电,Y0线圈通电,电机向前旋转;按下停止按钮Sb3以停止电机。
电动机点动控制和自锁控制
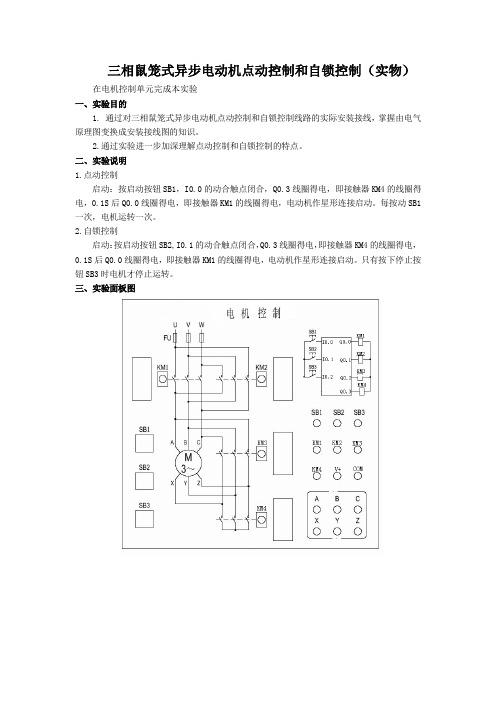
三相鼠笼式异步电动机点动控制和自锁控制(实物)在电机控制单元完成本实验一、实验目的1. 通过对三相鼠笼式异步电动机点动控制和自锁控制线路的实际安装接线,掌握由电气原理图变换成安装接线图的知识。
2.通过实验进一步加深理解点动控制和自锁控制的特点。
二、实验说明1.点动控制启动:按启动按钮SB1,I0.0的动合触点闭合,Q0.3线圈得电,即接触器KM4的线圈得电,0.1S后Q0.0线圈得电,即接触器KM1的线圈得电,电动机作星形连接启动。
每按动SB1一次,电机运转一次。
2.自锁控制启动:按启动按钮SB2,I0.1的动合触点闭合,Q0.3线圈得电,即接触器KM4的线圈得电,0.1S后Q0.0线圈得电,即接触器KM1的线圈得电,电动机作星形连接启动。
只有按下停止按钮SB3时电机才停止运转。
三、实验面板图四、实验步骤1.输入输出接线输入SB1 SB2 SB3 I0.0 I0.1 I0.2输出KM1 KM4 Q0.0 Q0.3注:PLC主机公共端接线方法见实验一2.打开主机电源将程序下载到主机中。
3.启动并运行程序观察实验现象。
五、梯形图参考程序实验三相鼠笼式异步电动机联锁正反转控制(实物)在电机控制单元完成本实验一、实验目的1. 通过对三相鼠笼式异步电动机连锁正反转控制线路的安装接线,掌握由电气原理图接成实际操作电路的方法。
2. 加深对电气控制系统各种保护、自锁、互锁等环节的理解。
3. 学会分析、排除继电--接触控制线路故障的方法。
二、实验说明启动:按启动按钮SB1,I0.0的动合触点闭合,M20.0线圈得电,M20.0的动合触点闭合,Q0.0线圈得电,即接触器KM1的线圈得电,0.5S后Q0.3线圈得电,即接触器KM4的线圈得电,电动机作星形连接启动,此时电机正转;按启动按钮SB2,I0.2的动合触点闭合,M20.1线圈得电,M20.1的动合触点闭合,Q0.1线圈得电,即接触器KM2的线圈得电,0.5S 后Q0.3线圈得电,电动机作星形连接启动,此时电机反转;在电机正转时反转按钮SB2是不起作用的,只有当按下停止按钮SB3时电机才停止工作;在电机反转时正转按钮SB1是不起作用的,只有当按下停止按钮SB3时电机才停止工作。
相异步电动机点动控制和自锁控制及联锁正反转控制实验报告
相异步电动机点动控制和自锁控制及联锁正反转控制实验报告实验报告:相异步电动机点动控制、自锁控制及联锁正反转控制一、引言二、实验目的1.了解相异步电动机的基本结构和工作原理;2.掌握相异步电动机点动控制、自锁控制及联锁正反转控制的方法;3.分析控制方法的实施步骤和原理;4.通过实验验证控制方法的有效性。
三、实验材料1.相异步电动机;2.控制电路板;3.电源;4.开关、按钮等控制元件。
四、实验方法及步骤1.点动控制实验:(1)将电动机接入电源,并接入控制电路板。
(2)将控制电路板中的相异步电动机点动控制电路连接好。
(3)按下点动按钮,观察电动机的运动情况,并记录实验结果。
2.自锁控制实验:(1)将电动机接入电源,并接入控制电路板。
(2)将控制电路板中的相异步电动机自锁控制电路连接好。
(3)按下自锁按钮,观察电动机的运动情况,并记录实验结果。
3.联锁正反转控制实验:(1)将电动机接入电源,并接入控制电路板。
(2)将控制电路板中的相异步电动机联锁正反转控制电路连接好。
(3)按下正转按钮,观察电动机的运动情况,并记录实验结果。
(4)按下反转按钮,观察电动机的运动情况,并记录实验结果。
五、实验结果与分析1.点动控制实验结果:实验结果表明,当按下点动按钮时,电动机会运动一小段时间后停止。
这是因为控制电路通过控制信号,使电动机转动一个固定的角度,然后停止。
2.自锁控制实验结果:实验结果表明,当按下自锁按钮时,电动机会一直运动直到再次按下自锁按钮,电动机才会停止。
这是因为通过自锁控制电路,电动机会一直保持运行状态。
3.联锁正反转控制实验结果:实验结果表明,当按下正转按钮时,电动机会顺时针旋转。
而当按下反转按钮时,电动机会逆时针旋转。
这是因为通过联锁正反转控制电路,可以控制电动机的旋转方向。
六、实验心得通过本次实验,我们深入了解了相异步电动机的基本结构和工作原理,以及常见的控制方法。
实验结果也验证了这些控制方法的有效性。
三相鼠笼式异步电动机点动控制、自锁控制和正反转控制

实验一三相鼠笼式异步电动机点动、自锁控制和正反转控制一、实验目的1. 通过对三相鼠笼式异步电动机点动控制和自锁控制线路的实际安装接线,掌握由电气原理图变换成安装接线图的知识。
2. 通过对三相鼠笼式异步电动机正反转控制线路的安装接线,掌握由电气原理图接成实际操作电路的方法。
3. 加深对电气控制系统各种保护、点动控制、自锁、互锁等环节的理解。
4. 学会分析、排除继电--接触控制线路故障的方法。
二、原理说明1. 继电─接触控制在各类生产机械中获得广泛地应用,凡是需要进行前后、上下、左右、进退等运动的生产机械,均采用传统的典型的正、反转继电─接触控制。
交流电动机继电─接触控制电路的主要设备是交流接触器,其主要构造为:(1) 电磁系统─铁心、吸引线圈和短路环。
(2) 触头系统─主触头和辅助触头,还可按吸引线圈得电前后触头的动作状态,分动合(常开)、动断(常闭)两类。
(3) 消弧系统─在切断大电流的触头上装有灭弧罩,以迅速切断电弧。
(4) 接线端子,反作用弹簧等。
2. 在控制回路中常采用接触器的辅助触头来实现自锁和互锁控制。
(1)自锁。
要求接触器线圈得电后能自动保持动作后的状态,这就是自锁,通常用接触器自身的动合触头与起动按钮相并联来实现,以达到电动机的长期运行,这一动合触头称为“自锁触头”。
(2)互锁。
使两个电器不能同时得电动作的控制,称为互锁控制,如为了避免正、反转两个接触器同时得电而造成三相电源短路事故,必须增设互锁控制环节。
为操作的方便,也为防止因接触器主触头长期大电流的烧蚀而偶发触头粘连后造成的三相电源短路事故,通常在具有正、反转控制的线路中采用既有接触器的动断辅助触头的电气互锁,又有复合按钮机械互锁的双重互锁的控制环节。
○1电气互锁为了避免接触器KM1(正转)、KM2(反转)同时得电吸合造成三相电源短路,在KM1(KM2)线圈支路中串接有KM1(KM2)动断触头,它们保证了线路工作时KM1、KM2不会同时得电(如图30-1),以达到电气互锁目的。
三相异步电动机启动控制原理及接线图

三相异步电动机启动控制原理图1.三相异步电动机的点动控制点动正转控制线路是用按钮、接触器来控制电动机运转的最简单的正转控制线路。
所谓点动控制是指:按下按钮,电动机就得电运转;松开按钮,电动机就失电停转。
典型的三相异步电动机的点动控制电气原理图如图3-1(a)所示。
点动正转控制线路是由转换开关QS、熔断器FU、启动按钮SB、接触器KM及电动机M组成。
其中以转换开关QS作电源隔离开关,熔断器FU作短路保护,按钮SB控制接触器KM的线圈得电、失电,接触器KM的主触头控制电动机M的启动与停止。
点动控制原理:当电动机需要点动时,先合上转换开关QS,此时电动机M尚未接通电源。
按下启动按钮SB,接触器KM的线圈得电,带动接触器KM的三对主触头闭合,电动机M便接通电源启动运转。
当电动机需要停转时,只要松开启动按钮SB,使接触器KM的线圈失电,带动接触器KM的三对主触头恢复断开,电动机M失电停转。
在生产实际应用中,电动机的点动控制电路使用非常广泛,把启动按钮SB换成压力接点、限位节点、水位接点等,就可以实现各种各样的自动控制电路,控制小型电动机的自动运行。
2.三相异步电动机的自锁控制三相异步电动机的自锁控制线路如图3-2所示,和点动控制的主电路大致相同,但在控制电路中又串接了一个停止按钮SB1,在启动按钮SB2的两端并接了接触器KM的一对常开辅助触头。
接触器自锁正转控制线路不但能使电动机连续运转,而且还有一个重要的特点,就是具有欠压和失压保护作用。
它主要由按钮开关SB(起停电动机使用)、交流接触器KM(用做接通和切断电动机的电源以及失压和欠压保护等)、热继电器(用做电动机的过载保护)等组成。
欠压保护:“欠压”是指线路电压低于电动机应加的额定电压。
“欠压保护”是指当线路电压下降到某一数值时,电动机能自动脱离电源电压停转,避免电动机在欠压下运行的一种保护。
因为当线路电压下降时,电动机的转矩随之减小,电动机的转速也随之降低,从而使电动机的工作电流增大,影响电动机的正常运行,电压下降严重时还会引起“堵转”(即电动机接通电源但不转动)的现象,以致损坏电动机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
试题一三相电动机点动控制和自锁控制一、说明1.点动控制启动:按启动按钮SB1,X0的动合触点闭合,Y3线圈得电,即接触器KM4的线圈得电,0.1S后Y0线圈得电,即接触器KM1的线圈得电,电动机作星形连接启动。
每按动SB1一次,电机运转一次。
2.自锁控制启动:按启动按钮SB2,X1的动合触点闭合,Y3线圈得电,即接触器KM4的线圈得电,0.1S 后Y0线圈得电,即接触器KM1的线圈得电,电动机作星形连接启动。
只有按下停止按钮SB3时电机才停止运转。
二、实验面板图三、要求1、在操作箱设计输入输出接线2、编制梯形图程序。
3、打开主机电源将程序下载到主机中。
4、启动并运行程序观察实验现象。
5、书面写出PLC接线图,递交书面梯形图。
试题二三相鼠笼式异步电动机联锁正反转控制一、实验说明启动:按启动按钮SB1,X0的动合触点闭合,Y3线圈得电,M0的动合触点也闭合,延时0.1S后Y0的线圈得电,电机作星形连接启动,此时电机正转;按启动按钮SB2,X1的动合触点闭合,Y3线圈得电,M1的动合触点也闭合,延时0.1s后Y0的线圈得电,电机作星形连接启动,此时电机反转。
在电机正转时反转按钮SB2是不起作用的,只有当按下停止按钮SB3时电机才停止工作;在电机反转时正转按钮SB1是不起作用的,只有当按下停止按钮SB3时电机才停止工作。
二、实验面板图三、要求1、在操作箱设计输入输出接线2、编制梯形图程序。
3、打开主机电源将程序下载到主机中。
4、启动并运行程序观察实验现象。
5、书面写出PLC接线图,递交书面梯形图。
试题三三相鼠笼式异步电动机带延时正反转控制一、实验说明启动:按启动按钮SB1,X0的动合触点闭合,Y3的线圈得电,Y0的线圈也同时得电,此时电机正转,延时3S后,Y0的线圈失电,Y1的线圈得电,此时电机反转;按启动按钮SB2,X1的动合触点闭合,Y3的线圈得电,Y1的线圈也同时得电,此时电机反转,延时4S,Y1的线圈失电,Y0的线圈得电,此时电机正转;按停止按钮SB3电机停止运转。
二、实验面板图三、要求1、在操作箱设计输入输出接线2、编制梯形图程序。
3、打开主机电源将程序下载到主机中。
4、启动并运行程序观察实验现象。
5、书面写出PLC接线图,递交书面梯形图。
试题四三相鼠笼式异步电动机星/三角换接起动控制一、实验说明启动:按启动按钮SB1,X0的动合触点闭合,M20线圈得电,M20的动合触点闭合,同时Y0线圈得电,即接触器KM1的线圈得电,1S后Y3线圈得电,即接触器KM3的线圈得电,电动机作星形连接启动;6S后Y3的线圈失电,同时Y2线圈得电,电动机转为三角形运行方式,按下停止按钮SB3电机停止运行。
二、实验面板图三、要求1、在操作箱设计输入输出接线2、编制梯形图程序。
3、打开主机电源将程序下载到主机中。
4、启动并运行程序观察实验现象。
5、书面写出PLC接线图,递交书面梯形图。
试题五四节传送带的模拟一、实验说明本实验是一个用四条皮带运输机的传送系统,分别用四台电动机带动,控制要求如下:启动时先起动最末一条皮带机,经过1秒延时,再依次起动其它皮带机。
停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带机。
当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待运完后才停止。
例如M2故障,M1、M2立即停,经过1秒延时后,M3停,再过1秒,M4停。
当某条皮带机上有重物时,该皮带机前面的皮带机停止,该皮带机运行1秒后停,而该皮带机以后的皮带机待料运完后才停止。
例如,M3上有重物,M1、M2立即停,再过1秒,M4停。
二、实验面板图三、要求1、在操作箱设计输入输出接线2、编制梯形图程序。
3、打开主机电源将程序下载到主机中。
4、启动并运行程序观察实验现象。
5、书面写出PLC接线图,递交书面梯形图。
试题六 LED数码显示的抢答控制一、控制要求介绍1、四人组成的竞赛抢答,有四个对应按扭,编号1,2,3,4,当某一组按下按扭后,显示出该组编号,并使铃发出响声,同时锁住其他组的抢答器(其他组抢答无效),抢答器设有复位开关,复位后可重新抢答。
2、为了统一,设定按扭1-4对应输入点为小型,复位开关X4。
输出:铃 HA—Y00,A-G对应Y0-Y73、当第1组抢答时,LED数码显示器应显示1,既图中的B,C段亮,显示数字1。
当第二组抢答时,应是A,B,G,E,D亮,显示数字2。
当第三组抢答时应是A,B,G,C,D 亮,显示数字三。
第四组抢答时应是F,G,B,C亮二、LED数码显示控制的实验面板图:上图中,下框中的A、B…H分别接主机的输出点Y0、Y1…Y7;SD接主机的输入点X0。
上框中的A、B、C、D、E、F、G、H用发光二极管模拟输出。
三、要求1、在操作箱设计输入输出接线2、编制梯形图程序。
3、打开主机电源将程序下载到主机中。
4、启动并运行程序观察实验现象。
5、书面写出PLC接线图,递交书面梯形图。
试题七液体混合装置控制的模拟一、实验说明本实验为两种液体混合装置,SL1、SL2、SL3为液面传感器,液体A、B阀门与混合液阀门由电磁阀YV1、YV2、YV3控制,M为搅匀电机,控制要求如下:初始状态:装置投入运行时,液体A、B阀门关闭,混合液阀门打开20秒将容器放空后关闭。
启动操作:按下启动按钮SB1,装置就开始按下列约定的规律操作:混合液体阀打开先将剩余液体放完。
液体A阀门打开,液体A流入容器。
当液面到达SL2时,SL2接通,关闭液体A阀门,打开液体B阀门。
液面到达SL1时,关闭液体B阀门,搅匀电机开始搅匀。
搅匀电机工作6秒后停止搅动,混合液体阀门打开,开始放出混合液体。
当液面下降到SL3时,SL3由接通变为断开,再过2秒后,容器放空,混合液阀门关闭,开始下一周期。
停止操作:按下停止按钮SB2后,在当前的混合液操作处理完毕后,才停止操作(停在初始状态上)。
二、实验面板图上图中, SL1、SL2、SL3为液面传感器,用钮子开关来模拟三、要求1、在操作箱设计输入输出接线2、编制梯形图程序。
3、打开主机电源将程序下载到主机中。
4、启动并运行程序观察实验现象。
5、书面写出PLC接线图,递交书面梯形图。
试题八水塔水位控制模拟一、实验说明当水池水位低于水池低水位界(S4为ON表示),阀Y打开进水(Y为ON)定时器开始定时,4秒后,如果S4还不为OFF,那么阀Y指示灯闪烁,表示阀Y没有进水,出现故障,S3为ON后,阀Y关闭(Y为OFF)。
当S4为OFF时,且水塔水位低于水塔低水位界时S2为ON,电机M运转抽水。
当水塔水位高于水塔高水位界时电机M停止。
面板中S1表示水塔的水位上限,S2表示水塔水位下限,S3表示水池水位上限,S4表示水池水位下限,M1为抽水电机,Y为水阀。
三、实验面板图三、要求1、在操作箱设计输入输出接线2、编制梯形图程序。
3、打开主机电源将程序下载到主机中。
4、启动并运行程序观察实验现象。
5、书面写出PLC接线图,递交书面梯形图。
一、实验说明鼓风机系统一般有引风机和鼓风机两级构成。
当按下启动按钮之后,引风机先工作,工作5秒后,鼓风机工作。
按下停止按钮之后,鼓风机先停止工作,5秒之后,引风机才停止工作。
控制鼓风机的接触器由Y0控制,引风机的接触器由Y1控制。
二、要求1、将Y0、Y1指示灯作为引风机和鼓风机同PLC连接。
2、连接好启动和停止开关y3、在操作箱设计输入输出接线4、编制梯形图程序。
5、打开主机电源将程序下载到主机中。
6、启动并运行程序观察实验现象。
7、书面写出PLC接线图,递交书面梯形图。
试题十一、实验说明设计一个由5个灯组成的彩灯组。
按下启动按钮之后,相邻的两个彩灯两两同时点亮和熄灭,不断循环。
每组点亮的时间为5秒。
按下停止按钮之后,所有彩灯立刻熄灭。
二、要求1、将5个灯同PLC相连接。
2、连接好启动和停止开关y3、在操作箱设计输入输出接线4、编制梯形图程序。
5、打开主机电源将程序下载到主机中。
6、启动并运行程序观察实验现象。
7、书面写出PLC接线图,递交书面梯形图。
一、实验说明一个小车能在轨道上左右开动。
轨道两边有两个限位开关SQ1(X3)、SQ2(X4)。
小车在停止状态时,当按下左行启动开关(X0)之后,小车立刻向左开动。
左行过程中碰到SQ1后,就停止2秒,然后就向右行驶,右行过程中碰到SQ2,就停止2秒,然后向左行驶。
小车在停止状态时,当按下右行启动开关(X1)之后,小车立刻向左开动。
右行过程中碰到SQ2后,就停止2秒,然后就向左行驶,左行过程中碰到SQ1,就停止2秒,然后就向右行驶。
按下停止按钮(X2),小车立刻停止二、要求1、连接好各个限位开关和开始、停止按钮。
2、只有在停止状态下,左行启动开关和右行启动开关才起作用。
3、在操作箱设计输入输出接线4、编制梯形图程序。
5、打开主机电源将程序下载到主机中。
6、启动并运行程序观察实验现象。
7、书面写出PLC接线图,递交书面梯形图。
试题十二一、实验说明计算PLC输入端的脉冲个数,当脉冲个数大于PLC某个变量存储器的设定值10时,PLC所控制的灯泡发光,经过由PLC位存储器的设定值的时间后,灯灭。
要求:脉冲输入端的信号及复位信号由操作人设定;正确连接PLC的输出端的信号,使PLC能正常工作。
二、要求1、正确连接PLC的输出端的信号,使PLC能正常工作。
2、在操作箱设计输入输出接线3、编制梯形图程序。
4、打开主机电源将程序下载到主机中5、。
启动并运行程序观察实验现象。
6、书面写出PLC接线图,递交书面梯形图。
试题十三一、实验说明设置计数器的值,具体要求是:1、按下启动按钮,计数器开始计数,当输入端信号大于设定值时,信号灯亮。
灯亮15秒后停止,信号灯也可用停止按钮控制;2、计数器的计数次数设定为10次。
3、正确连接PLC的输出端的信号,使PLC能正常工作。
4、在操作箱设计输入输出接线5、编制梯形图程序。
6、打开主机电源将程序下载到主机中7、启动并运行程序观察实验现象。
8、书面写出PLC接线图,递交书面梯形图。
试题十四霓虹灯设计一、说明设计简单霓虹灯,要求4盏灯,在每一瞬间三盏灯亮,一盏灯熄,且按照顺序排列灯熄。
每盏灯亮、熄的时间分别为0.5秒,二、实验面板图熄(1)熄(2)熄(3)熄(4)(1)(2)(3)(4)三、要求1、正确连接PLC的输出端的信号,使PLC能正常工作。
2、在操作箱设计输入输出接线3、编制梯形图程序。
4、打开主机电源将程序下载到主机中5、。
启动并运行程序观察实验现象。
6、书面写出PLC接线图,递交书面梯形图。
评分标准:(注:本资料素材和资料部分来自网络,仅供参考。
请预览后才下载,期待您的好评与关注!)。