一阶纯滞后系统的控制方法研究
针对纯滞后系统神经网络Dahlin控制的研究
ly sse .Th x rme tlsmuain v rfe h tte c mp u d c nrlmeh d k e s te a v na e fb t hi loih a d CMAC a y tm ee pei na i lt ei sta h o o n o to t o e p h d a tg so oh Da l ag rtm n o i n
具有 良好 的稳定性 和控 制效果 。
关键 词 :C C 神 经 网络 MA
中图分类号 :T 2 3 P 7
D hi算 法 al n
前 馈控 制器
纯滞后 系统 文献标Fra bibliotek志码 :A Abtat src :Ai n ttedsd a tgso ov nin l o t l r ae nD hi loi m i o t ln bet fauiglreiet , k d miga h i v nae f n e t a nr l sdo a l ag rh ncnr l gojcs etr g nr a ( a a c o c oe b n t oi n a i
针对纯滞后系统神经网络 D h n控 制的研 究 al i
文定都
针对 纯 滞 后 系统 神经 网络 D hi 制 的研 究 al n控
Re e r h o u a t o k Da l s a c n Ne r lNe w r h i Con r l o a m e S s e n to rDe d Ti y t m f
具有纯滞后一阶惯性系统的计算机控制系统设计介绍
5.1 系统仿真 ................................................... 24 5.2 抗干扰性能分析.............................................. 25 5.3 元件清单 ................................................... 27 第六部分 心得体会 ................................................. 28 参考文献.......................................................... 29 附程序 ........................................................... 30
具体内容: 1) 自己给出系统的闭环传递函数的表达式 2) 自己设定系统性能指标 3) 书面设计一个计算机控制系统的硬件布线连接图 4) 硬件布线连接图转化为系统结构图 5) 选择一种控制算法 6) 软件工程知识编写程序流程图 7) 在 MATLAB 下进行编程和仿真,给出单位阶跃函数的输出结
果表 8) 进行系统的可靠性和抗干扰性的分析
第三部分 电路设计 ................................................. 19 3.1 器件选型 ................................................... 19 3.1.1 控制芯片的选择 ........................................ 19 3.1.3 A/D 转换器的选择....................................... 19 3.1.4 D/A 转换器的选择....................................... 20 3.2 温度检测电路与整形放大滤波电路 ............................... 20 3.3 A/D 转换电路 ............................................... 21 3.4 D/A 转换电路 ............................................... 21 3.5 数码管显示电路.............................................. 22
一阶纯滞后系统的不完全微分PID控制

目录0.前言 (1)1. 不完全微分PID算法设计 (2)2.算法仿真研究 (3)3.一阶纯滞后系统的不完全微分PID控制程序 (4)4.实验结果 (7)5.结论及总结 (8)参考文献 (8)课设体会 (10)一阶纯滞后系统的不完全微分PID控制沈阳航空航天大学北方科技学院摘要:提出在PID算法中加入一阶惯性环节,通过不完全微分PID算法来改善干扰对系统的影响,用MATLAB仿真分析说明该算法在改善过程的动态性能方面具有良好的控制精度。
在现代工业生产中,自动控制技术的使用越来越多,而随着工业和控制技术的发展,自动控制理论也在发展和完善,出现了多种控制方法如最基础的PID控制以及微分先行控制、中间微分控制、史密斯补偿控制、模糊控制、神经网络控制等。
自动控制技术的发展在工业生产中遇到了一系列的问题:如在本文中所研究的一阶纯滞后系统的控制就是控制理论中一个较为重要的问题。
由控制理论可知,无滞后控制系统(简单点说就是没有延迟)比有滞后系统更加稳定,更加容易控制。
因此如何解决生产中滞后的问题在当前工业大生产中尤其重要。
论文在常规PID控制也就是比例-积分-微分控制的基础上提出了三种控制方法即:微分先行控制、中间微分反馈控制、史密斯补偿控制。
并对这三种方案进行Simulink 仿真,检测其抗干扰性能。
为便于分析,论文将所得仿真结果以图形的方式给予显示出来,形象生动便于理解。
关键词:一阶纯滞后 ;不完全微分;仿真;PID0.前言在多数工业过程当中,控制对象普遍存在着纯时间滞后现象,如化工,热工过程等.这种滞后时间的存在,会使系统产生明显的超调量和较长的调节时间,滞后严重时甚至会破坏系统的稳定性,在工业生产上产生事故.因此长期以来,纯滞后系统就一直是工业过程中的难控制对象,人们也对它进行了大量的研究.在现代工业生产和理论研究中出现了多种控制方法,如PID控制、PID改进控制、Smith 预估算法控制以及模糊控制、神经网络控制等.而对于最基础的一阶纯滞后系统常用的控制方法主要是PID 控制、不完全微分PID 控制.1. 不完全微分PID 算法设计为了克服上述缺点, 在PID 算法中加一个一阶惯性环节(低通滤波器)G f (S )=1/[1+T f (S )],将低通滤波器直接加在微分环节上,构成如图1的不完全微分PID 控制:式中,T 为采样时间,T f 为滤波器系数,T 1和T D 分别为积分时间常数和微分时间常数,令 ɑ=T f /(T f +T),则T/(T+T f )=1-ɑ;显然有1<α,1−α<1成立,不完全微分项为:若e(k)为单位阶跃(即e(k)=1,k=0,1,2,∧)由此得出不完全微分项为:可见,引入不完全微分后,微分输出按ɑk U D(0)的规律)(ɑ(1)逐渐衰减,所以不完全微分能有效地克服前述微分项的不足。
实验8实验指导书具有纯滞后系统的大林控制
实验8实验指导书具有纯滞后系统的大林控制实验8具有纯滞后系统的大林控制系统一、实验目的1.了解算法的基本原理;2.掌握纯滞后对象的控制算法及其在控制系统中的应用。
2、实验设备1.thbcc-1型信号与系统?控制理论及计算机控制技术实验平台2.thbxd数据采集卡一块(含37芯通信线、16和usb电缆线各1根))三、实验内容1.纯滞后一阶惯性环节达林算法的实现。
2.采用纯滞后二阶惯性环节实现达林算法。
4、实验原理在生产过程中,大多数工业对象具有较大的纯滞后时间,对象的纯滞后时间?对控制系统的控制性能极为不利,它使系统的稳定性降低,过渡过程特性变坏。
当对象的纯滞后时间? 与对象的惯性时间常数相比,传统的比例积分微分(PID)控制难以获得良好的控制性能制性能。
长期以来,人们对纯滞后对象的控制作了大量的研究,比较有代表性的方法有大林算法和纯滞后补偿预估)控制。
本实验基于达林算法。
Dalin算法的综合目标不是最小拍频响应,而是具有纯滞后时间的一阶滞后响应。
其等效闭环传递函数为要求的等效环节的时间常数,t为采样周期。
通过对零阶holder方法进行离散,可以得到系统的闭环传递函数:v.实验步骤1、实验接线1.1根据图8-1,连接惯性链接的模拟电路;1.2用导线将该电路输出端与数据采集卡的输入端“ad1”相连,电路的输入端与数据采集卡的输入端“da1”相连;2.脚本程序运行2.1启动计算机,在桌面双击图标“thbcc-1”,运行实验软件;2.2顺序点击虚拟示波器界面上的开始钮和工具栏上的脚本编程器2.3点击脚本编辑器窗口文件菜单下的“打开”按钮,选择“计算机控制算法VBS\\basic algorithm of computer control technology”文件夹下的“Dalin algorithm”脚本程序并打开。
阅读并理解节目,2.4点击脚本编辑器窗口的调试菜单下“启动”;用虚拟示察图输出端的响应曲线;2.5点击脚本编辑器的调试菜单下“停止”,修改程序中n(可模拟对象的滞后时间,滞后时间为n*运行步长,单位为ms;当运行步长,n的取值范围为1~5)值以修改对象的滞后时间,再点击“启动”按钮。
面向复杂纯滞后系统的智能控制系统研究

面向复杂纯滞后系统的智能控制系统研究。
引言在化工和热工的工业过程控制中,物料或能量的传输和变送延迟会导致控制对象具有纯滞后性。
这种纯滞后性常因控制系统输出的超量导致目标系统控制指标产生超调或振荡。
因此,纯滞后系统的控制过程相对复杂。
典型的纯滞后系统有液晶玻璃窑炉⑴的复杂多点加热及恒温控制系统、硅溶胶反应釜的温度控制系统⑵以及注塑控制系统里的温控系统[3]。
随着产能需求的增加,为了提升玻璃、硅溶胶、树脂等物料的加工量,原本原料的单通道流入变成双通道甚至多通道,并同步增加了加工腔体的容量和温控能力。
规模化生产企业里多套加工设备的生产能力不同,会按照设备各自设置的温控指标以及原料注入流量进行非持续生产。
多台设备还需要保证一致特性的合料。
因此,传统基于可编程逻辑控制器(PrOgrammabIelogiCContrOller, PLC)和各种比例积分微分(PrOPC)rtional integral differential, PID)算法的面向单设备的电气控制系统,将无法很好地满足这类快速、大规模的复杂纯滞后系统的应用要求。
具体问题表现为:①为了实现自适应控制算法(如改进PID),采用神经网络⑷或者模糊算法[5-6],但主流控制器件PLC作复杂运算的能力不足;②由于不同厂家的硬件专有性和封闭性,使得扩展和程序移植都比较困难[力;⑨PlD调参需要较复杂的过程,无法快速同步设备的工作状态[8],包括控制指标下达以及控制参数的调整,给生产过程管理带来困难。
利用软PLC的控制系统设计[9]无法从根本上解决不同PLC之间不兼容、不能快速替换的问题,而基于工业物联网应用技术可以快速实现数据的分布式运算与集中控制口O-11]。
通过创新性结合工业大数据应用技术[12],本文提出了1种通用的、面向大规模复杂纯滞后系统的云端联合智能控制系统,并在其基础上给出了具体的应用验证结果。
1复杂纯滞后系统结构单输入型纯滞后控制对象工作过程通常是单口投料,通过流量测量变送,经可控制阀门进入加工腔体。
一阶纯滞后系统控制
2 纯滞后系统
2.1 纯滞后系统的定义
在工业生产过程中,被控对象通常具有不同程度的纯延迟。例如气体物料、液体
物料通常经过管道传送,固体物料通过传送带传送。而在工业生产中利用改变物 料的流量来调节生产过程时,经过输送环节的传送时间(滞后)后,物料的变化 情况才能到达生产设备进而实现工艺参数的改变。这个输送过程的传送时间是一个 纯滞后时间。再如,在热交换过程中,经常将被加热物料的输出温度作为被控制量, 而把载热介质(如过热蒸汽)的流量作为控制量,载热介质流量改变后,经过一定时 间才表现为输出物料温度的变化。 系统这种表现可用含有纯滞后的传递性描述。这类控制过程的特点是:当控 制作用产生后,在滞后时间范围内,被控参数完全没有响应,使得系统不能及时 随被控量进行调整以克服系统所受的扰动。 因此这样的过程必然会产生较时显的 超调量和需要较长的调节时间。所以,含有纯延迟的过程被公认为是较难控制的 过程,其难控制程度与过程的时间常数之比大于 0.3 时,该过程是大滞后过程。 随此比值的增加,过程的相位滞后增加而使超调增大,在实际生产过程中甚至会 因为严重超调而出现事故。[1] 由控制理论可知,无滞后比有滞后时系统更稳定,系统更容易控制。而且,无滞 后时稳定裕量无穷大,对应增益为无穷大;而当系统含有滞后时,稳定裕量有限时, 对应增益也有相应有限值。此外,大滞后会降低整个控制系统的稳定性。因此大滞后 过程的控制一直备受关注。解决纯滞后系统问题对工业的重要性不言而喻。
1 引言
1.1 课题背景
在多数工业过程当中,控制对象普遍存在着纯时间滞后现象,如化工,热工过程等. 这种滞后时间的存在,会使系统产生明显的超调量和较长的调节时间 ,滞后严重时甚 至会破坏系统的稳定性,在工业生产上产生事故.因此长期以来,纯滞后系统就一直是 工业过程中的难控制对象 ,人们也对它进行了大量的研究.在现代工业生产和理论研 究中出现了多种控制方法,如 PID 控制、PID 改进控制、Smith 预估算法控制以及模 糊控制、神经网络控制等 .而对于最基础的一阶纯滞后系统常用的控制方法主要是 PID 控制、微分先行控制、中间微分反馈控制、史密斯补偿控制等.
一阶纯滞后环节表达式_理论说明
一阶纯滞后环节表达式理论说明1. 引言1.1 概述在控制理论和系统分析中,纯滞后环节是一种重要的数学模型。
纯滞后环节可以用来描述实际系统中存在的延时响应特性,尤其是在工程控制中具有广泛的应用。
本文将详细介绍一阶纯滞后环节的数学表达式、特点以及其在系统控制领域中的应用。
1.2 文章结构本文主要包括五个部分,首先是引言部分,对文章进行概述和结构说明;第二部分将详细探讨一阶纯滞后环节的理论说明,包括定义、数学表达式以及其特点和应用;第三部分将进行理论验证与实例分析,介绍实验设备与方法,并对收集到的数据进行处理和分析;第四部分将对结果进行讨论与分析,比较不同参数和输入信号对滞后响应的影响,并探讨纯滞后环节模型在系统控制中的应用前景;最后一部分为结论与展望,总结研究工作并提出未来研究方向建议。
1.3 目的本文旨在深入理解一阶纯滞后环节,在数学上准确描述其特性和行为,并探讨其在实际系统中的应用。
通过理论验证与实例分析,旨在验证和进一步加深对纯滞后环节的认识。
最终,本文将为系统控制领域提供关于一阶纯滞后环节的理论基础和应用前景的参考依据。
2. 一阶纯滞后环节表达式的理论说明:2.1 什么是一阶纯滞后环节一阶纯滞后环节是控制系统中常见的一种动态特性,它是指输出信号与输入信号之间存在固定时间延迟和衰减比例的关系。
在一个典型的一阶纯滞后环节中,输出信号会滞后于输入信号,并以指数衰减的形式逐渐趋近于输入信号。
2.2 纯滞后环节的数学表达式对于一个一阶纯滞后环节,其数学表达式可以表示为:G(s) = e^(-τs)其中,G(s)表示该纯滞后环节的传递函数,s为复平面上的复变量,τ为时间常数。
2.3 纯滞后环节的特点与应用纯滞后环节具有以下几个特点和应用:a) 时间延迟:由于纯滞后环节的存在,在输入信号发生改变时,输出信号会有一定的延迟。
这种时间延迟效应在实际控制系统中具有很大影响,在某些需要考虑时序关系和稳定性要求较高的控制任务中起到重要作用。
一类纯滞后系统的新型神经元控制器
N uo e I n— S t o t l w ih h ste s l— l r ig a i t a d i s l ac l t n a y【 i e删 mi C n r , h c a ef e nn bl y n s i et c l a a d e s 0 n h o h a l mp o u e r i i t d c d A trs l t n a d p a t a e t i w s d m n t td ta e I c n rla s nr u e f i ai n r ci lts, t a e o s ae tt o e mu o c r h h o t l o a d h s te b t rc nr l f c n p l a o rs e t . n a et o t e t d a p i t n po p cs h e o e a ci
L
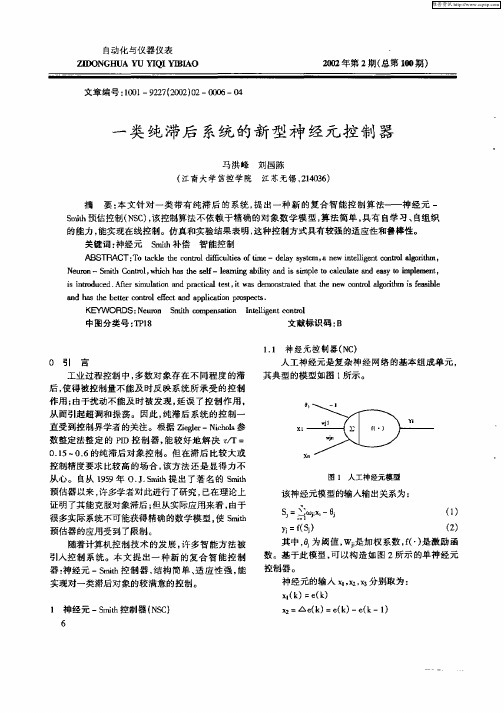
图 2 单神经元 x k 的加权 系数 . k i ) ( K为神经元 的 比例系数 , 单神经元控制器通过加权系数的调整来 实现 自 适应 、 组织功能 ; 自 并通过关联搜索来产生控 制信号。其控制算法取为 :
3
神经 元 一S i mt 制器 ( S ) h控 N c 的结 构 如 图 4所
一
类 纯 滞 后 系统 的 新 型 神 经 元 控 制 器
马洪峰 刘 国陈 ( 江南大学信控学院 江 苏无锡 ,106 243 )
摘 要: 本文针对一类 带有 纯滞后 的系统 , 提出一种新 的复合智能控 制算法——神经元 一 S i 预估控制( s )该控制算法不依赖于精确 的对象数学模 型, mt h Nc , 算法简单 , 具有 自学 习、 自组织 的能力 , 能实现在线控制。仿真和实验结果表明, 这种控制方式具有较强的适应性和鲁棒性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目一阶纯滞后系统的控制方法研究摘要在现代工业生产中,自动控制技术的使用越来越多,而随着工业和控制技术的发展,自动控制理论也在发展和完善,出现了多种控制方法如最基础的PID控制以及微分先行控制、中间微分控制、史密斯补偿控制、模糊控制、神经网络控制等。
自动控制技术的发展在工业生产中遇到了一系列的问题:如在本文中所研究的一阶纯滞后系统的控制就是控制理论中一个较为重要的问题。
由控制理论可知,无滞后控制系统(简单点说就是没有延迟)比有滞后系统更加稳定,更加容易控制。
因此如何解决生产中滞后的问题在当前工业大生产中尤其重要。
论文在常规PID控制也就是比例-积分-微分控制的基础上提出了三种控制方法即:微分先行控制、中间微分反馈控制、史密斯补偿控制。
并对这三种方案进行Simulink仿真,检测其抗干扰性能。
为便于分析,论文将所得仿真结果以图形的方式给予显示出来,形象生动便于理解。
关键词:自动控制,仿真,PID,复杂控制The control method research of the first-order delay systemAbstractThe automatic control technology use more and more in modern industrial production, and as the industrial and control technology development, the automatic control theory are developed and perfected, a lot of controlled methods appear such as PID control which is the most basic control and differential first control, intermediate differential control, Smith compensation control, fuzzy control, nerve network control. Automatic control technology had experienced a series of questions in industrial production: as the first-order delay system control in this article which is a more important issue in the control theory. Known by the control theory,a no lag control system (simple say is no delay) is more stable and more easily controlled than a delay system . So it is particularly important of how to solve the lagging problem in the current industrial production . The articles propose three control methods such as differential first control 、the middle of differential feedback control、smith compensation control base the conventional PID control in the other word is proportional - integral - derivative controller .And simulate this three programs by the simulink, testing its interference fearure. For convenient analyze the simulation result , the paper of the study derive from the simulation results by the graphical ,which we can easy understand and clear know the mean in the article.Key Words:automatic control; simulation; PID; complicated control目录1 引言 (1)1.1课题背景 (1)1.2课题综述 (1)2 纯滞后系统 (1)2.1 纯滞后系统的定义 (1)2.2 Matlab/Simulink软件简介 (2)3 对一阶纯滞后系统的研究 (5)3.1常规PID (5)3.1.1常规PID及其组成 (5)3.1.2常规PID仿真 (7)3.2串联PID (8)3.2.1串联PID组成及其框图 (8)3.2.2串联PID仿真及分析 (8)3.3 PID改进控制 (10)3.3.1微分先行控制 (10)3.3.2中间微分控制 (12)3.4史密斯控制 (15)3.4.1史密斯补偿控制 (15)3.4.2增益改进型史密斯补偿控制 (18)4结语 (21)参考文献 (22)致谢................................................... 错误!未定义书签。
1 引言1.1课题背景在多数工业过程当中,控制对象普遍存在着纯时间滞后现象,如化工,热工过程等.这种滞后时间的存在,会使系统产生明显的超调量和较长的调节时间,滞后严重时甚至会破坏系统的稳定性,在工业生产上产生事故.因此长期以来,纯滞后系统就一直是工业过程中的难控制对象,人们也对它进行了大量的研究.在现代工业生产和理论研究中出现了多种控制方法,如PID控制、PID改进控制、Smith 预估算法控制以及模糊控制、神经网络控制等.而对于最基础的一阶纯滞后系统常用的控制方法主要是PID控制、微分先行控制、中间微分反馈控制、史密斯补偿控制等.1.2课题综述在现代科学技术的众多领域中自动控制技术起着越来越重要的作用.自动控制是指在没有人直接参与的情况下,利用外加的设备或装置(称控制装置或控制器),使机器,设备或生产过程(统称被控对象)的某个工作状态或参数(即被控制量)自动的按照预定的规律运行的控制技术.为了实现各种复杂的控制任务,首先要根据设计要求将被控制对象和控制装置按照一定的控制方式连接起来,组成一个有机的总体,这就是自动控制系统.在自动控制系统中被控对象的输出量即被控量是要严格加以控制的物理量,它可以要求保持为某一恒定值,例如温度,压力或飞行规迹等;而控制装置则是对被控对象施加控制作用的机构的总体,它可以采用不同的原理和方式对被控对象进行控制,但最基本的一种是基于反馈控制原理的反馈控制系统.在反馈控制系统中,控制装置对被控装置施加的控制作用,是取自被控量的反馈信息,用来不断修正被控量和控制量之间的偏差从而实现对被控量进行控制的任务,这就是反馈控制的原理.反馈过程中难免会产生滞后现象,纯滞后问题对工业生产的影响越来越大,解决纯滞后问题具有非常重要的意义.2 纯滞后系统2.1 纯滞后系统的定义在工业生产过程中,被控对象通常具有不同程度的纯延迟。
例如气体物料、液体物料通常经过管道传送,固体物料通过传送带传送。
而在工业生产中利用改变物料的流量来调节生产过程时,经过输送环节的传送时间(滞后)后,物料的变化情况才能到达生产设备进而实现工艺参数的改变。
这个输送过程的传送时间是一个纯滞后时间。
再如,在热交换过程中,经常将被加热物料的输出温度作为被控制量,而把载热介质(如过热蒸汽)的流量作为控制量,载热介质流量改变后,经过一定时间才表现为输出物料温度的变化。
系统这种表现可用含有纯滞后的传递性描述。
这类控制过程的特点是:当控制作用产生后,在滞后时间范围内,被控参数完全没有响应,使得系统不能及时随被控量进行调整以克服系统所受的扰动。
因此这样的过程必然会产生较时显的超调量和需要较长的调节时间。
所以,含有纯延迟的过程被公认为是较难控制的过程,其难控制程度与过程的时间常数之比大于0.3时,该过程是大滞后过程。
随此比值的增加,过程的相位滞后增加而使超调增大,在实际生产过程中甚至会因为严重超调而出现事故。
[1]由控制理论可知,无滞后比有滞后时系统更稳定,系统更容易控制。
而且,无滞后时稳定裕量无穷大,对应增益为无穷大;而当系统含有滞后时,稳定裕量有限时,对应增益也有相应有限值。
此外,大滞后会降低整个控制系统的稳定性。
因此大滞后过程的控制一直备受关注。
解决纯滞后系统问题对工业的重要性不言而喻。
2.2 Matlab/Simulink软件简介Simulink是MATLAB最重要的组件之一,是一个交互式动态系统建模,仿真和分析图形环境,是一个进行基于模型的嵌入式系统开发的基础开发环境.Simulink 可以针对控制系统等进行系统建模,仿真,分析等工作。
Simulink提供了一个建立控制系统方框图,并对系统进行模拟仿真的环境。
在Matlab的命令主窗口中单击File->New->Model,即可打开如图2.1所示的Simulink 库浏览窗口。
图2-1Simulink仿真软件模块库图 2.1中所示Simulink库包含许多控制系统方框图所需的模块,如输入源(Sources)、输出方式(Sinks)、连续系统模型(Continuous)、数学运算(Math)等根据控制系统结构,用户可以从输入源、输出方式、连续系统模型、数学运算等模型库中“拖入”各种模块,按要求连接并修改各模块的参数,即可完成系统模型的建立生成如图2.2的图形仿真窗口。
图2-2图形仿真窗口此外Simulink还有其它功能如:Simulink与MATLAB; 紧密集成,可以直接访问MATLAB大量的工具来进行算法研发、仿真的分析和可视化、批处理脚本的创建、建模环境的定制以及信号参数和测试数据的定义。
特点:丰富的可扩充的预定义模块库交互式的图形编辑器来组合和管理直观的模块图以设计功能的层次性来分割模型,实现对复杂设计的管理通过Model Explorer 导航、创建、配置、搜索模型中的任意信号、参数、属性,生成模型代码提供API用于与其他仿真程序的连接或与手写代码集成使用Embedded MATLAB™模块在Simulink和嵌入式系统执行中调用MATLAB算法使用定步长或变步长运行仿真,根据仿真模式(Normal, Accelerator, Rapid Accelerator)来决定以解释性的方式运行或以编译C 代码的形式来运行模型图形化的调试器和剖析器来检查仿真结果,诊断设计的性能和异常行为可访问MATLAB从而对结果进行分析与可视化,定制建模环境,定义信号参数和测试数据模型分析和诊断工具来保证模型的一致性,确定模型中的错误。