High accuracy NMO correction and application for VTI media
Accelerated plane-wave destruction

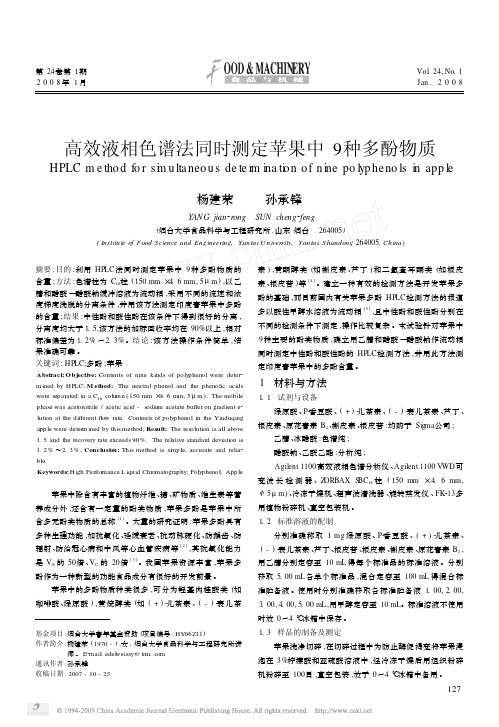
Accelerated plane-wave destructionZhonghuan Chen 1,Sergey Fomel 2,and Wenkai Lu 1INTRODUCTIONLocal slope fields have been widely used in geophysical applications,such as wave-field separation and denoising (Harlan et al.,1984;Fomel et al.,2007),antialiased seismic interpolation (Bardan,1987),seislet transform (Fomel and Liu,2010),velocity-independent NMO correction and imaging (Fomel,2007b ;Cooke et al.,2009),predictive painting (Fomel,2010),seismic attribute analysis (Marfurt et al.,1999),etc.Several tools exist for local slope estimation:local slant stack (Ottolini,1983;Harlan et al.,1984),complex trace analysis (Barnes,1996),multiwindow dip search (Marfurt,2006),local structure tensor (Fehmers and Höcker,2003;Hale,2007),and plane-wave destruction (Claerbout,1992;Fomel,2002).Plane-wave destruction (PWD)approximates the local wavefield by a local plane wave,and models it using a linear differential equation (Claerbout,1992).When plane-wave destruction is applied on discrete sampled seis-mic signals,the corresponding differential equation needs to be dis-cretized by finite differences.Claerbout (1992)used explicit finite differences.In this method,plane-wave approximation of the wave-field can be seen as applying a linear finite impulse response (FIR)filter to the wavefield.Slope estimation is equivalent to estimating a parameter of the FIR filter.A least-squares estimator of the local slope can be obtained by minimizing the prediction error of the fil-ter.To improve estimation performance of the explicit finite differ-ence scheme,Schleicher et al.(2009)proposed total least-squares estimation.The implicit finite difference scheme was applied to the differ-ential equation by Fomel (2002).Using an infinite impulse response (IIR)filter,known as the “Thiran allpass filter ”(Thiran,1971),to approximate the phase-shift operator,the plane-wave destruction equation becomes a nonlinear equation of the slope.An iterative algorithm was designed to estimate the slope.To improve stability in the iterative algorithm,a smoothing regularization (Fomel,2007a )of the increment can be applied at each iteration.Iterations of regular-ization can be time-consuming,however,particularly in the 3D case.In this paper,we prove that the plane-wave destruction equation is a polynomial equation of an unknown slope.In the case of a three-point approximation of Thiran ’s filter,the convergence results of the iterative algorithm can be analytically analyzed.In this case,we obtain an analytical estimator of the local slope and show that the smoothing regularization can be applied on the final estimator only once.This approach reduces the computational time signifi-cantly.We present 2D and 3D examples,which demonstrate that the proposed algorithm can obtain a slope-estimation result faster than the iterative algorithm,with a similar or even better accuracy.THEORYReview of PWDThe local plane wave can be represented by the following differ-ential equation (Claerbout,1992)Manuscript received by the Editor 23April 2012;revised manuscript received 7August 2012;published online 25January 2013.1Tsinghua University,Department of Automation,State Key Laboratory of Intelligent Technology and Systems,Tsinghua National Laboratory for Informa-tion Science and Technology,Beijing,China.E-mail:zhonghuanchen@;lwkmf@.2The University of Texas at Austin,Bureau of Economic Geology,Jackson School of Geosciences,Austin,Texas,USA.E-mail:sergey.fomel@beg.utexas .edu.©2013Society of Exploration Geophysicists.All rights reserved.V1GEOPHYSICS,VOL.78,NO.1(JANUARY-FEBRUARY 2013);P.V1–V9,9FIGS.,1TABLE.10.1190/GEO2012-0142.1D o w n l o a d e d 09/22/13 t o 221.226.175.186. R e d i s t r i b u t i o n s u b j e c t t o SE G l i c e n s e o r c o p y r i g h t ; s e e T e r m s o f U s e a t h t t p ://l i b r a r y .s e g .o r g /∂u ∂x þσ∂u ∂t¼0;(1)where σis the local slope in continuous space,with dimension of time/length.The wavefields observed at the two positions x 1,x 2have a time delay which is proportional to their distance,σj x 1−x 2j .In the sampled system with space and time intervals Δx and Δt ,we define the discrete space slope in the unit of Δt ∕Δx as p ¼σΔx ∕Δt .Because p is independent of the sampling interval,it can be directly used in irregular data set (in this case,the unit of the slopes becomes space-variant).The time delay between two adjacent positions is then the slope p Δtu ðx;t Þ¼u ðx þΔx;t þp Δt Þ:(2)With the Z transform applied along time and space directions,the above equation becomesð1−Z x Z p t ÞU ðZ x ;Z t Þ¼0;(3)where Z t is the unit time-shift operator,Z x denotes the unit space-shift operator,and U ðZ x ;Z t Þis the Z transform of u ðx;t Þ.Theoperator 1−Z x Z p t is the plane-wave ing Thiran ’sfractional delay filter H ðZ t Þ¼B ð1∕Z t ÞB ðZ t Þ(Thiran,1971)to approximate the time-shift operator Z p t ¼e j ωp ,where ωis the circular frequency,the plane-wave destructor can be expressed as (Fomel,2002),C ðp Þ¼B ðZ t Þ−Z x B 1Z t;(4)whereB ðZ t Þ¼X N k ¼−Nb k ðp ÞZ −k t ;(5)N is the order of the noncausal temporal filter,and b k ðp Þare func-tions of the local slope p .Equation 4is a 2D filter.Applying the filter at an arbitrary point in the wavefield,the plane-wave destruction equation 3becomes a nonlinear equation for the local slope pC ðp;Z x ;Z t ÞU ðZ x ;Z t Þ≈0:(6)An iterative method,such as Newton ’s method,can be applied to find the slope.In practice,wavefields are polluted by noise and the plane wave assumption may not hold true where faults and conflict-ing boundaries exist.To obtain a stable slope estimation,an addi-tional smoothing regularization process (Fomel,2007a )is needed at each step.The total computational cost of slope estimation by plane-wave destruction becomes O ðN d N f N l N n Þ,where N d is the size of the data,N f ¼2N þ1is the size of the filter,N l is the num-ber of linear iterations for regularization,and N n is the number of nonlinear iterations for solving equation 6.Typical values are N f ¼3,5,N l ¼10–50,and N n ¼5–10.Accelerated PWDGauss-Newton ’s iteration searches the solutions for nonlinearequation 6as follows:Let p k be the estimated slope at step k ,with estimating error (or destructive error)e k ¼C ðp k ÞU ðZ x ;Z t Þ.To findthe correct solution p k þ1that minimizes e k þ1,we need to find theincrement Δp k from the local linearizatione k þ1¼C ðp k ÞU ðZ x ;Z t ÞþC 0ðp k ÞU ðZ x ;Z t ÞΔp k ≈0;(7)where C 0ðp k Þis the derivative of C ðp Þat p k with respect to p .The iterative algorithm stops when a stationary point or a root of C ðp ÞU is reached.They are:•Points where C 0ðp k ÞU ¼0:When p k satisfies C 0ðp ÞU ¼0,then e k þ1¼e k ,and the Δp k dependency in equation 7is removed,stopping further iterations on p k .•Points where C ðp k ÞU ¼0and C 0ðp ÞU ≠0:In this case,Δp k ¼0,thus p k þ1¼p k ,eliminating the need for further improvements on p k .The iterative algorithm for equation 6may converge at different points,depending on the initial point that we chose;p 0¼0is a common practical choice for the initial solution.In this case,the iterative algorithm may converge to the least absolute root,which denotes the event with smallest dip angle.To analyze the convergence results,the maximally flat fractional delay filter (Thiran,1971;Zhang,2009)is designed with polyno-mial coefficientsb k ðp Þ¼ð2N Þ!ð2N Þ!ð4N Þ!ðN þk Þ!ðN −k Þ!Y N −1−km ¼0ðm −2N þp Þ×Y N −1þk m ¼0ðm −2N −p Þ:(8)Details on how to design the filter can be found in Appendix A .Because b k ðp Þis a polynomial of p ,expanding it,we get b k ðp Þ¼P 2N i ¼0c ki p iandB ðZ t ;p Þ¼X N k ¼−N X 2N i ¼0c ki Z −k t p i:(9)From equation 8,it is obvious that b k ðp Þ¼b −k ð−p Þ,thereforec ki ¼ð−1Þi c −k;i andB ðZ t ;p Þ¼B1Z t;−p :(10)Substituting the above two equations,the nonlinear equation 6becomes a 2N th°polynomial equation for pX 2N i ¼0a i p i ¼0;(11)and the coefficients of the polynomial plane-wave destruction canbe expressed asa i ¼½1−ð−1ÞiZ xX N k ¼−Nc ki Z −kt U;(12)which says that the coefficients of the polynomial PWD can be ob-tained by applying a 2D filter on the wavefield u .Moreover,the 2D filter can be decoupled into the cascade of two 1D directional filters;the temporal filter P N k ¼−N c ki Z −k t and the spatial filter 1−ð−1Þi Z x .V2Chen et al.D o w n l o a d e d 09/22/13 t o 221.226.175.186. R e d i s t r i b u t i o n s u b j e c t t o SE G l i c e n s e o r c o p y r i g h t ; s e e T e r m s o f U s e a t h t t p ://l i b r a r y .s e g .o r g /In the special case of N ¼1,we get a three-point approximation of B ðZ t Þ.It takes the following form (Fomel,2002)B ðZ t Þ¼ð1þp Þð2þp Þ12Z −1t þð2þp Þð2−p Þ6þð1−p Þð2−p Þ12Z t :(13)The plane-wave destruction equation 11is a quadratic equation.The coefficients a i ði ¼0;1;2Þcan be solved for and expressed asa i ¼112½1−ð−1Þi Z x v i ;(14)where v i are outputs of the following three-point temporal filtersv 0¼2ðZ −1t þ4þZ t ÞU;(15)v 1¼3ðZ t −Z −1t ÞU;(16)andv 2¼ðZ −1t −2þZ t ÞU:(17)In this case,the quadratic plane-wave destruction equation 11has one stationary point and two roots,which can be analytically ex-pressed as:f −a 12a 2;−a 1ÆffiffiffiDp 2a 2g ,where D ¼a 21−4a 0a 2.The plots in Figure 1show the convergence process of the itera-tive algorithm when we choose p 0¼0as the starting value.Geo-metrically when D ≤0,the iteration converges to the stationarypoint −a 12,as shown in Figure 1a .When D >0,it converges to the least absolute solution of equation 11.Figure 1b and 1c shows the convergence process to the least absolute solution in different cases.We can summarize the convergence result of the iterative algorithm as followsp ¼8>><>>:−a12a 2D ≤0−2a0a 1−ffiffiffiD p D >0;a 1<0−2a 0a 1þffiffiffiDpD >0;a 1>0:(18)As −2a 0a 1ffiffiffiD p ¼−a 1ÆffiffiffiDp 2a 2inthe above equation,we use−2a 0a 1ffiffiffiDp instead of −a 1ÆffiffiffiDp 2a 2to obtainbetter numerical stability.When the data is polluted by noise,to obtain a robust slope es-timation,we can combine the equations in a local window into the following equation setFp ≈g ;(19)where F is a normalized diagonal matrix and g is a vector.Their elements are denominators and numerators of equation 18,respec-tively.When we are solving the above equation set by least squares,we can use Tikhonov ’s regularization (Fomel,2002)or the shaping regularization (Fomel,2007a ,equation 13)to obtain a smooth solu-tion as followsp ¼H ½I þH T ðF T F −I ÞH −1H T F T g ;(20)where H is an appropriate smoothing operator.In this case,the reg-ularization runs only once;therefore,the computational cost isreduced to O ðN d N f N l Þ.In 3D applications,there are two polynomial PWD equations for inline and crossline slopes separately.Note that,using the decou-pling,inline,and crossline slope estimations can share the temporal filtering results in equations 15–17.We can obtain the coefficients of the crossline plane-wave destruction equation asa i ¼112½1−ð−1Þi Z y v i .(21)The five-point or longer approximations of B ðZ t Þcan achieve higher accuracy.Equation 6in this case becomes a higher-order polynomial equation (see details in Appendix A ),which can be solved numerically.However,there are multiple stationary points,and it is difficult to determine the right one analytically.For appli-cations that need five-point or higher accuracy,we suggest obtain-ing an initial slope estimation by the proposed three-point method and using it to make the iterative algorithm converge faster (to de-crease N n ).EXAMPLESSynthetic examplesTo test the performance of the proposed slope-estimation method,we generated a harmonic wave field with constant slope p 0¼0.3,shown in Figure 2.We added different scales of additive white Gaussian noise (AWGN)to the wave field,and estimated the slope by the proposed method.To compare with the iterative algorithm by Fomel (2002),the mean square error (MSE)is used as the criterionMSE ðp Þ¼E fðp −p 0Þ2g :(22)We use five iterations in the iterative method,N n ¼5.For the constant slope model,using a large smoothing window,theFigure 1.The iterative results of Newton ’s algorithm.The initial point is p 0¼0(solid circle),and the convergence result is marked by an empty circle:(a)when D ≤0,(b)when D >0and a 1a 2>0,(c)when D >0,and a 1a 2<0.Accelerated plane-wave destructionV3D o w n l o a d e d 09/22/13 t o 221.226.175.186. R e d i s t r i b u t i o n s u b j e c t t o SE G l i c e n s e o r c o p y r i g h t ; s e e T e r m s o f U s e a t h t t p ://l i b r a r y .s e g .o r g /smoothing regularization can converge faster (with less N l )and we can obtain a better estimation accuracy.For each method,we try the smoothing windows from 2to 200and show the mean square errors in Figure pared with the iterative method,the proposed method has better accuracy at the left upper (low SNR and small smoothing window)and worse accuracy at right bottom corner (high SNR and large smoothing window).We show the total runtime of all the noise scale data in Figure 4.For all smoothing windows in the regularization,the proposed method (solid line)only uses about one-fifth of the run time of the three-point (N ¼1)iterative method (dash line).A more complicated model from Claerbout (1999)and Fomel (2002)is shown in Figure 5a .It has variable slopes in synclines,anticlines,and faults.The slope estimated by the proposed method is shown in Figure 5b .The estimation takes about 20ms.The three-point (N ¼1)iterative method can obtain a similar estimation (shown in Figure 5c )by five iterations,which takes about 130ms.Bothmethods use a four-point smoothing window in the regularization,but the proposed method obtains a slightly smoother estimation.In Figure 5d ,we show the faults detected by the residuals of the pro-posed plane-wave destruction.ApplicationThe 2D seislet transform (Fomel and Liu,2010)uses local slopes to predict and update even and odd traces in the wavelet lifting scheme.The seislet transform itself is fast,but the slope estimation step is comparatively slow.The 3D seislet transform can be con-structed in the same way by using 3D slopes and cascading 2D transforms in inline and crossline directions.So that an efficient transform can be built,the proposed accelerated plane-wave de-struction is applied to slope estimation.Figure 6shows a part of the Teapot Dome image from Wyoming.The 3D slope estimation yields two slope fields along twospaceFigure 2.Harmonic waves with constant slope p 0¼0.3.a)b)Figure 3.Mean square errors of the slope estimations by the proposed method (a)and the three-point (N ¼1)iterative method(b).Figure 4.Run time of the proposed method (solid line)and the three-point (N ¼1)iterative method (dashed line).V4Chen et al.D o w n l o a d e d 09/22/13 t o 221.226.175.186. R e d i s t r i b u t i o n s u b j e c t t o SE G l i c e n s e o r c o p y r i g h t ; s e e T e r m s o f U s e a t h t t p ://l i b r a r y .s e g .o r g /directions.Figure7shows the local inline and crossline slope fields estimated by the proposed algorithm.The two slopes are used by the lifting scheme in the seislet trans-form to obtain the seislet transform coefficients.The coefficients of the2D seislet transform are concentrated at the planes near the zero inline plane,as shown in Figure8a,whereas in Figure8b,the3D transform coefficients are concentrated in the corner region near the origin.To illustrate the compressive performance of the3D seislet trans-form,Figure9shows the reconstruction results at different percen-tages of the compression.Most of the data can be reconstructed using only1%of the seislet coefficients(1∶100compression ratio). To compare with the iterative methods quantitatively,we define the following normalized crosscorrelation(NCC)NCCðx;yÞ¼x T yk x k2k y k2:(23)a)c)b)d)Figure5.2D slope estimation example:(a)synthetic data,(b)slope field estimated by the proposed algorithm,(c)slope field estimated by the iterative algorithmafter five iterations,(d)faults detection by plane-wave destruction with the estimated slope.Figure6.A portion of the3D data from the Teapot data set.Accelerated plane-wave destruction V5 Downloaded9/22/13to221.226.175.186.RedistributionsubjecttoSEGlicenseorcopyright;seeTermsofUseathttp://library.seg.org/Figure7.3D slopes estimated by the proposed algorithm:(a)inline slope(b)crossline slope.Figure8.Coefficients of:(a)the2D seislet transform along inline direction only,(b)the3D seislettransform.Figure9.Reconstruction of3D-seislet-compressed data using:(a)5%of the seislet coefficients,(b)1%of the seislet coefficients.V6Chen et al.Downloaded9/22/13to221.226.175.186.RedistributionsubjecttoSEGlicenseorcopyright;seeTermsofUseathttp://library.seg.org/In the seislet transform,the more accurate dip we use,the better compression we can obtain.The NCC between the reconstructed data and the original data can be used to quantify the compressive performance.In Table 1,the proposed method is compared with three-point (N ¼1)and five-point (N ¼2)iterative methods.In all three methods,we use 10-point smoothing windows in in-line and crossline dimensions,and use five-point smoothing win-dow in time direction.To obtain a similar slope estimation as the proposed method,the three-point (N ¼1)and five-point (N ¼2)iterative methods need about six and five iterations,respectively.The five-point method can obtain a better compression ratio than the three-point method because of its better accuracy in slope es-timation.However,although the iterative methods have smaller PWD residuals,neither of them achieves a better NCC than the proposed method.In this case,using the noniterative estimation as the initial in five-point estimation can save at least 250s.That is to say,the computational time cost is reduced by a factor of about six.CONCLUSIONSIn this paper,we derived an analytical estimator of the local slope in three-point implicit plane-wave destruction.On the basis of this result,we built an accelerated slope-estimation algorithm.Exam-ples show that the proposed method can produce a result that is similar to that of the iterative algorithm,at a reduced computation time.Two or more conflicting slopes can be estimated simultaneously by the iterative algorithm.In this case,the PWD equation is a multi-variable polynomial,and the convergence analysis becomes com-plicated.The proposed noniterative method is not yet suitable for multislope estimation.However,we believe that it can find many applications in situations where one dominant slope is suf-ficient.ACKNOWLEDGMENTSWe thank Alexander Klokov for his helpful technical sugges-tions.We also thank the reviewers and the editors for their carefulreview of the paper.The Teapot Dome data is provided by the Rocky Mountain Oilfield Testing Center,sponsored by the U.S.Department of Energy.Zhonghuan Chen ’s joint research is sponsored by the China Scholarship Council and China State Key Science and Technology Projects (2011ZX05023-005-007).APPENDIX APOLYNOMIAL FORM OF PWDIf all the coefficients of B ðZ t Þare polynomials of p ,equation 4is also a polynomial of p ,and the plane-wave destruction equation becomes in turn a polynomial equation of p .The problem is to de-sign a 2N þ1-points filter B ðZ t Þwith polynomial coefficients suchthat the all pass system H ðZ t Þ¼B ð1∕Z t ÞB ðZ t Þcan approximate the phase-shift operator Z p t ¼e j ωp .Denoting the phase response of the system as θðωÞ,that is H ðe j ωÞ¼e j θðωÞ,the group delay of the system isτðωÞ¼∂θðωÞ∂ω:(A-1)The maximally flat criteria designs a filter with a smoothest phase response.There are 2N unknown coefficients in H ðZ t Þ,so we can add 2N flat constraints for the first 2N -th order deviratives of the phase response.It becomes (Zhang,2009,equation 7)τðωÞ¼p ∂n τðωÞ∂ωn ¼0n ¼1;2;:::;2N;(A-2)which is equivalent to the following linear maximally flat condi-tions (Thiran,1971)X N k ¼−Nðd −k Þ2n þ1b k ¼0;(A-3)where n ¼0;1;:::;2N −1and d ¼p ∕2is the fractional delay of B ð1∕Z t Þor 1∕B ðZ t Þ.To solve b k from the above equations,Thiran (1971)used an ad-ditional condition b 0¼1,which leads b k ðk ≠0Þto be a fractional function of p .Differently from that,we use the following condition,X N k ¼−Nb k ¼1;(A-4)where b k can be proved to be polynomials of p .Let vector b ¼½b 0;b N ;:::;b 1;b −1;:::;b −N T .Combining equations A-3and A-4,we rewrite them into the following matrix formTable 1.Performance of different dip estimation methods in 3D seislet transform:Runtime is the runtime of the slope estimation process;RES-inline is the inline residual;RES-xline is the crossline residual;NCC-1is the normalized crosscorrelation between the original data and the reconstruction using 1%of the seislet coefficients;NCC-5uses 5%of the coefficients.The run time for 2D and 3D seislet transform are about 22.45s and 45.0s,respectively.Method N IterationsRuntime (s)RES-inline RES-xline NCC-1NCC-5Noniterative 1054.630.23140.22420.88580.9618Iterative 16334.50.22670.21720.88140.961Iterative25301.60.21940.20750.88380.9615Accelerated plane-wave destruction V7D o w n l o a d e d 09/22/13 t o 221.226.175.186. R e d i s t r i b u t i o n s u b j e c t t o SE G l i c e n s e o r c o p y r i g h t ; s e e T e r m s o f U s e a t h t t p ://l i b r a r y .s e g .o r g /266666411:::11:::1d d −N :::d −1d þ1:::d þN d 3ðd −N Þ3:::ðd −1Þ3ðd þ1Þ3:::ðd þN Þ3......::::::::::::...d 2N −1ðd −N Þ4N −1:::ðd −1Þ4N −1ðd þ1Þ4N −1:::ðd þN Þ2N −13777775×b ¼2666664100 03777775:The matrix on the left side,denoted as V ,can be split into four blocksA B C Das shown above.Following the lemma of matrix inversion,V −1¼ðA −BD −1C Þ−1−ðA −BD −1C Þ−1D −1−D −1C ðA −BD −1C Þ−1D −1þD −1ðA −BD −1C Þ−1BD −1;(A-5)therefore,the coefficientsb ¼V −1½1;0;:::;0 T¼ ðA −BD −1C Þ−1−D −1C ðA −BD −1C Þ−1:(A-6)Let subindex i ¼−N;−N þ1;:::;−1;1;2;:::;N andx i ¼d þi .Submatrix D can be expressed asD ¼EX¼26666641:::11:::1ðd −N Þ2:::ðd −1Þ2ðd þ1Þ2:::ðd −N Þ2ðd −N Þ4:::ðd −1Þ4ðd þ1Þ4:::ðd þN Þ4...:::......:::...ðd −N Þ4N −2:::ðd −1Þ4N −2ðd þ1Þ4N −2:::ðd þN Þ4N −23777775×diag 2666666664x −N ...x −1x 1...x N3777777775;so D −1¼X −1E −1.Denoting U ¼E −1with elements u ij ,j ¼1;2;:::;2N ,as E is a Vandermonde matrix,u ij and Lagrange intepolating polynomials have the following relationshipX 2N j ¼1u ij x 2j −2¼l i ðx Þ;(A-7)where i ¼−N;:::;−1;1;:::;N ,and l i ðx Þis the Lagrange poly-nomial related to the basis d þi ,l i ðx Þ¼Ym ≠i;m ≠0−N ≤m ≤Nx 2−ðd þm Þ2ðd þi Þ2−ðd þm Þ2:(A-8)Substituting the above equation,u ij and x into equation A-7,we can prove equation A-7.It follows that½E −1C i ¼d l i ðd Þ;(A-9)½D −1C i ¼½X −1E −1C i ¼dd þi l iðd Þ;(A-10)withl i ðd Þ¼ð−1Þi þ1N !N !ðN þi Þ!ðN −i Þ!d þi d Y Nm ¼−N 2d þm2d þm þi:(A-11)Thus,A −BD −1C ¼XN i ¼−Nð−1ÞiN !N !ðN þi Þ!ðN −i Þ!Y N m ¼−N p þmp þm þi ¼ð4N Þ!N !N !1Q m ¼N þ1(A-12)and½A −BD −1C −1¼ð2N Þ!ð2N Þ!ð4N Þ!N !N !Y 2Nm ¼N þ1ðm 2−p 2Þ:(A-13)It is the coefficient b 0,a 2N th°polynomial of p .Substituting it into equation A-6,the coefficients at k ¼Æ1;Æ2;:::ÆN are expressed asb k ¼−½D −1C k ½A −BD −1C −1¼ð2N Þ!ð2N Þ!ð4N Þ!ðN þk Þ!ðN −k Þ!Y N −1−km ¼0ðm −2N þp Þ×Y N −1þk m ¼0ðm −2N −p Þ:(A-14)With the additional condition A-4in 2N þ1points approxima-tion,all the coefficients are polynomials of p of 2N th°.Thus,theplane-wave destruction equation 6is proved to be a polynomial equation of 2N th°.REFERENCESBardan,V .,1987,Trace interpolation in seismic data processing:Geo-physical Prospecting,35,343–358,doi:10.1111/j.1365-2478.1987.tb00822.x .Barnes,A.E.,1996,Theory of 2-D complex seismic trace analysis:Geo-physics,61,264–272,doi:10.1190/1.1443947.Claerbout,J.F.,1992,Earth soundings analysis:Processing versus inver-sion:Blackwell Scientific Publications,/sep/prof/index.html ,accessed 10October 2012.V8Chen et al.D o w n l o a d e d 09/22/13 t o 221.226.175.186. R e d i s t r i b u t i o n s u b j e c t t o SE G l i c e n s e o r c o p y r i g h t ; s e e T e r m s o f U s e a t h t t p ://l i b r a r y .s e g .o r g /。
超高效液相色谱法测定苹果汁饮料中的展青霉素及其不确定度分析

超高效液相色谱法测定苹果汁饮料中的展青霉素及其不确定度分析1. 引言1.1 研究背景展青霉素是一种广泛应用于食品和饮料中的抗生素,其存在可能会对人体健康造成潜在风险。
对于食品和饮料中展青霉素的检测和监测显得尤为重要。
苹果汁饮料是一种常见的消费品,其质量和安全性备受关注。
对于苹果汁饮料中是否存在展青霉素进行准确检测具有一定的现实意义。
目前,超高效液相色谱法已经成为展青霉素检测的主流方法之一,其具有检测速度快、分离效果好、灵敏度高等优点。
通过超高效液相色谱法可以准确、快速地对苹果汁饮料中的展青霉素进行定量分析。
本研究旨在利用超高效液相色谱法对苹果汁饮料中的展青霉素进行检测,并对测定结果进行不确定度分析,以确保数据的可靠性和科学性。
该研究对于提高食品安全检测技术水平,保障消费者健康具有一定的理论和实践意义。
1.2 研究目的研究目的是为了准确快速地测定苹果汁饮料中展青霉素的含量,保障食品安全。
展青霉素是一种广泛用于农业生产中的抗生素,过量使用会对人体健康造成危害。
通过超高效液相色谱法,可以实现对展青霉素的快速分离和定量测定,能够提高检测的准确性和灵敏度。
本研究旨在建立一种可靠的分析方法,为食品安全监测和质量控制提供技术支持。
通过不确定度分析,评估测定结果的可靠性和精确度,并为日后实验结果的解释和比较提供参考。
在实验方法的指导下,我们将通过一系列实验操作和数据分析,探讨展青霉素在苹果汁饮料中的含量和分布,为食品生产和消费者提供科学依据。
1.3 研究意义本研究旨在利用超高效液相色谱法,对苹果汁饮料中的展青霉素进行检测,通过测定展青霉素的含量,确保产品的安全性和合规性。
结合不确定度分析,对检测结果进行全面评估,提高检测结果的可靠性和准确性。
研究苹果汁饮料中的展青霉素及其不确定度分析,不仅可以为食品安全监管部门提供科学依据,也可为生产商提供技术支持,帮助他们提高产品质量和市场竞争力。
通过本研究的开展,有望推动苹果汁饮料行业的规范发展,保障消费者的权益和健康。
地震绕射波成像(英文)

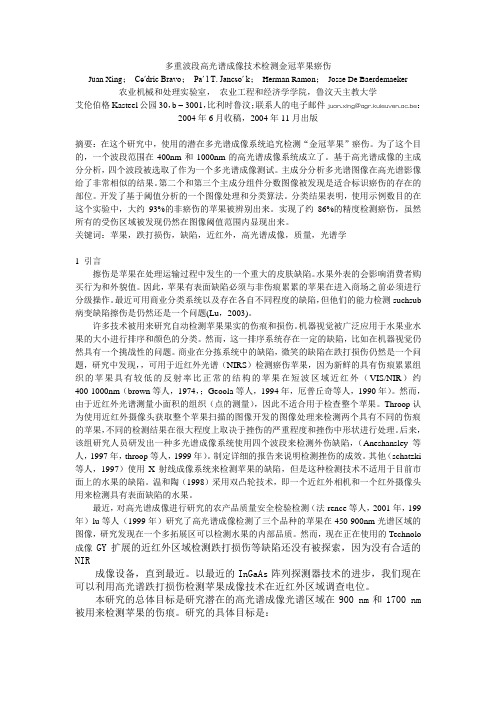
Imaging the earth using seismic diffractionsRongfeng ZhangAbstractDiffractions in seismic data indicate discontinuities of the subsurface,although they are often obscured by and difficult to separate from the more prominent reflectionevents.A seismic section containing only diffractions could therefore be of great signifi-cance for the interpretation of seismic data.Here,some techniques such as dipfilteringand Radon transform are adapted and used to extract diffractions from prestack seis-mic data.Final diffraction stack sections will be shown and possible applications arediscussed.Both synthetic model examples and a real and complicated data set exampleare illustrated.We also show that not only can the identification of the discontinuitiesin structure be enhanced,but,also,the resolution may be dramatically improved incontrast to the traditional definition of resolution in seismology.1IntroductionSmall and complex structure imaging is now gaining interest and stead in both academic and industry applications.Tremendous development and progress of relevant techniques such as prestack depth migration(PSDM),super-computer modeling and lithology inversion has, as a consequence,resulted.In spite of this progress,it appears that seismic diffractions, although essential for a good imaging,are rarely separately taken into account,especially in oil and gas exploration.In fact,diffractions are sometimes even considered as noise as, for example,in ground penetrating radar(GPR).As we will see later on,except for PSDM, conventional data processing largely favours reflections over diffractions.In other words, reflections,already strong,are enhanced even more than diffractions during the processing. This reflection-centered methodology tends to distort the weak diffractions during processing. Only when reflections are removed therefore,or at least attenuated,can the potentially unique value of diffractions be revealed following diffraction specific processing.Actually,as early as1952,Krey[5]considered applications involving diffractions.Harris et al.[1]in1996,Landa et al.[6]in1998and Khaidukov et al.[3]in2003used diffractions102–Imaging with seismic diffractions 1100.51.01.5t i m e (s )100200300400(a)00.51.01.5t i m e (s )100200300400(b)Figure 1:Vertical resolution illustration.(a)and (b)are stacked and migrated sections respectively.The ratios of the vertical throw to the wavelength are 1,0.5,0.25and 0.125from top to bottom reflections.to detect inhomogeneities or scattering objects,and even imaging (Khaidukov et al.[4]in 2003used a focusing-defocusing approach).What would result if diffractions were treated separately in routine seismic data processing?We will show that clear,high-resolution images of discontinuities such as faults and edges of pinchouts can be achieved.By high-resolution,we actually mean super-resolution,when compared to the traditional definition of resolution.Typically,the vertical resolution of seismic exploration is defined as a quarter of the dominant wavelength λ=υf(1)where υis the velocity and f is the dominant frequency,which varies with both the medium and the source properties.Practically,we assume half wave length as a reasonable value for resolution.Figure 1shows,from top to bottom,four reflections with different verticalthrow (1,12,14and 18of wavelength).Figure 1(a)is the stacked section and Figure 1(b)is the migrated section.It can be seen that only faults with a vertical throw larger than 14wavelength can be reliably resolved.Lateral resolution is defined as Fresnel zone [2]r =υ2 t 0f (2)where υis the velocity and f is the dominant frequency as used in vertical resolution,t 0is12the vertical travel time.This is slightly more complicated than the vertical resolution.Since t0is included,lateral resolution is also related to the distance from the source.As the following sections will show,diffractions can provide higher resolution than that of the above convention.This is a striking but not surprising fact:if the size of an object is close to the wavelength,the dominant energy will be the diffracted rather than reflected. Reflections can,in fact,totally disappear.This phenomenon is well known in physics but is not fully utilized in exploration seismology.2Separation of diffractions and reflectionsDiffractions and reflections have different characteristics,such as amplitude and travel time, which facilitates their plete separation is only possible in very rare cases, but,from a practical point of view,it is not necessary to completely eliminate the reflections. Our aim is to reveal the potential of diffractions—some part of reflections may remain as long as the diffractions are not masked.Generally speaking,NMO,an adaptive dip-filter,migration,and de-migration operators will be used to suppress reflections.The procedure for suppressing reflections free of steep dipping reflection events is:1.Sort the data into the common middle point(CMP)domain;perform velocity analysis,picking the velocities that correspond to reflections including multiples.Note that the velocity does not have to be monotonically increasing with time as required in normal velocity analysis.2.Apply NMO corrections based on the velocities picked above.3.Resort the data into the common shot point domain.4.Apply an adaptive dip-filter to each shot gather,with dip angle chosen close to zero.5.Resort the data to the CMP domain and apply inverse NMO correction using the samevelocity estimated at step1.6.Process the data as one requires,such as re-estimating primary velocity(based ondiffractions)and NMO corrections and then stack,or even prestack depth migration.2–Imaging with seismic diffractions13Unlike conventional applications,the dip-filtering here used is basically tofilter out the horizontal strong events since the reflections after NMO correction become the strongflat events.We found that the data have to be tapered on both sides in order to decreasing strong artifacts due to the dip-filtering.This procedure was incorporated into the dip-filtering,obtaining much better results.We use the term adaptive dip-filtering.Figure6 shows the effect of the tapering.In case the data contain steep dipping reflection events,the procedure is modified to:1.Sort the data into the CMP domain;perform velocity analysis,picking the velocitiescorresponding to reflections including multiples.As before the velocity does not have to be monotonically increasing with time.2.Apply NMO corrections based on the velocities picked above.3.Resort the data into the common shot point domain.4.Apply a linear Radon transform,filtering out the reflections in Radon domain thentransform back.5.Resort the data to the CMP domain and apply inverse NMO corrections using thesame velocities estimated in step1.6.Process the data as required,such as re-estimating primary velocity(based on diffrac-tions)and NMO corrections and then stack,or even prestack depth migration.The former procedure can very efficiently separate diffractions and reflections without af-fecting diffractions but is not suitable for arbitrary sections;the latter procedure can work on any sections but some reflection energy will be left in the section afterfiltering.It is known that the reflection events of both theflat and the dipping reflectors in CMP domain are hyperbolae with apex located at zero offset.After NMO correction,the responses offlat reflectors will beflattened if the correct RMS velocity v0is used,but events of the dipping reflectors are notflattened using the same velocity.However,if the velocity is adjusted by the dip angleα,that isv=v0cos(α)(3)then those events corresponding to dipping reflections can also beflattened.This is also true for diffraction events and consequently this approach is not suitable to differentiate them.14/Figure 2:Geometry of a single dipping reflector.αis the dip angle.S and X stands for the source and the receiver respectively.X is the mirror point of X for the dipping reflector.O is the reflecting point on the dipping reflector.h is the distance between S and the dipping reflector.P is the perpendicular projection point of S on XX .O is the intersecting point of the normal line of the dipping plane with the surface.However,we found that dipping reflection responses in the common shot gather domain will become dipping linear events if they are NMO corrected using RMS velocity without angle adjustment.First,we derive the travel time equation of a dipping reflector in common shot gather domain.For a flat reflectort =1v √x 2+4h 2(4)where v is the RMS velocity,h is the distance between the surface and the reflector,x is the offset (the distance between the source and the receiver)and t is the two-way travel time.For a dipping reflector,the travel time equation can be deduced from Figure 2ast =1vx 2+4hx ·sin (α)+4h 2(5)or t =1v(x +2h ·sin (α))2+4h 2cos 2(α)(6)where h is the vertical distance between the source and the dipping reflector and αis the dip angle.It is a hyperbola with a shifted apex in −2h ·sin (α).Appendix A gives the detail of the derivation.From the appendix,the travel time equation after NMO correction (using2–Imaging with seismic diffractions15 a two term approximation)of aflat reflector and dipping reflector aret NMO=2hv−1641h3vx4−O(x6)(7)andt NMO=h(1+cos2(a))cos(a)v+sin(a)xcos(a)v+(1−cos(a))x24h cos(a)v+O(x4)(8)respectively.It is clear that if x is not too large,the travel time for theflat reflector becomesa horizontal line as expectedt NMO≈2hv(9)but whenα=0,i.e.the dipping reflector,the linear term in equation can’t be ignored but higher order terms can be,so we havet NMO≈h(1+cos2(a))cos(a)v+sin(a)xcos(a)v(10)which is a dipping straight line.It is easy to see that ifα=0the result for dipping reflector is identical to that for aflat reflector.Figure3and Figure4show the numerical results. Figure3(a)shows the travel time curve for aflat reflector.It is a hyperbola with apex located at the zero offset.After NMO correction using a two-term approximation,the result is shown in Figure3(b),which is aflat straight line in near and middle offsets,and Figure 3(c)shows the ideal corrected line.Similarly Figure4(a)shows the travel time curve of a dipping reflector(α=300)which is a shifted hyperbola.Figure4(b)shows the NMO corrected result which is a dipping straight line in the center portion.Figure4(c)shows the ideal dipping straight line.It must be pointed out that if higher terms are used in the NMO correction,the ideal results as shown in Figure3(c)and Figure4(c)are expected.A linear Radon transform is now used tofilter out those reflections after NMO correction. To achieve this,we developed a special strategy which will be illustrated with examples in section3.5.3Synthetic data examplesThe examples will show the reflection-suppressed or diffraction-only image and demonstrate the processing procedure and illustrate why conventional processing affects diffractions.16–0.200.20.40.6y –1500–1000–50050010001500x –0.200.20.40.6y –1500–1000–50050010001500x –0.200.20.40.6y –1500–1000–50050010001500x (a)(b)(c)Figure 3:Example of NMO correction of a flat reflector –0.200.20.40.6y –2000–1500–1000–50050010001500x –0.200.20.40.6y –2000–1500–1000–50050010001500x –0.200.20.40.6y–2000–1500–1000–50050010001500x (a)(b)(c)Figure 4:Example of NMO correction of a dipping reflector2–Imaging with seismic diffractions17 3.1Example1Figure5shows a simple example.The data do not contain multiples but do contain a small amount of noise.Figure5(a)is the stack section of a simple three-layer structure withfirst reflection containing a small fault.The vertical throw of the fault is one wavelength.Figure 5(b)is the poststack time migrated section of Figure5(a).Obviously,in Figure5(a)the diffractions are obscured by strong reflections.When the reflections are removed,a clear diffraction section,Figure5(c),results.After migration,Figure5(d),the accurate location of the fault is depicted.The phase property of the migrated dots provide even more information about the property of the fault.Specifically,when comparing the two dots in Figure5(d), the top one is different from the bottom one in terms of positive to negative transition or phase feature.Figure6shows an individual gather.Figure6(a)is the original gather;Figure6(b)is the reflection-suppressed gather using the adaptive dip-filter;6(c)is the reflection-suppressed gather using normal dip-filtering.Clearly,the adaptive dip-filtering result does not exhibit the artifacts such as the strong four dots in Figure6(c),caused by the strong boundary effects of the prominent reflections.In this simple example,we are able to completely remove reflections,although as stated previously,this is not a stringent requirement.It should be pointed out that the stacking velocities used for NMO correction are picked from the reflection events as usual.The processing of Figure5and Figure6are all based on this velocity.However,this is definitely not correct for diffraction stacking.Figure7shows some NMO corrected and reflection-suppressed CMP gathers.Note that at some locations the diffractions areflattened,but at many locations they are not.Thus,when stacking them together,loss of diffraction energy is inevitable.It is not surprising that there is a noticeable change when diffraction stacking velocity is used to stack diffractions.Figure8shows the comparison.Figure8(a)shows the diffraction stack section stacked using reflection stacking velocity;8(b)shows the diffraction stack section stacked using diffraction stacking velocity;8(c)shows the poststack migrated section of 8(a);8(d)shows the poststack migrated section of8(b).Both stack section and migrated section have a remarkable change.In Figures8(a)and8(b),theflank,especially the right flank,of the diffractions have gained clarity.The artifacts just left to the apex in Figure 8(a)due to the wrong velocity used has disappeared in Figure8(b).Compared to Figure 8(c),the focusing of the diffractions in Figure8(d)is much better and,consequently,the1800.51.01.52.0t i m e (s )123456(a)00.51.01.52.0t i m e (s )123456(b)00.51.01.52.0t i m e (s )123456(c)00.51.01.52.0t i m e (s )123456(d)Figure 5:A three-layer structure example.(a)stack section;(b)poststack time migrated section;(c)the stack section of extracted diffractions;(d)the poststack time migrated section of Figure (c).2–Imaging with seismic diffractions19Figure6:One gather in example1shows improvement due to the adaptive dip-filter.(a)is the original gather;(b)is the reflection-suppressed gather using normal dip-filtering;(c)is the reflection-suppressed gather using the adaptive dip-filtering.100015002000250030000.5time(s)1.01.5Figure7:Some CMP gathers after NMO correction and reflection-suppression using reflection velocityresolution has been improved.In this example,the maximum CMP fold is just16.It can be expected that if the fold number increases,the differences will be more accentuated.3.2Example2This is a slightly complicated model.Figure9(a)shows the model that contains a multi-layer structure with a sink in the middle.Figure9(b)shows three shot gathers of the synthetic data of this model.Besides the prominent four reflection events,there are many other events which are the diffractions.These diffractions are information-rich.Figure10shows the stack section and migrated section respectively.Figure10(a)shows the stack section.Figure10(b)shows the poststack time migrated section of Figure10(a). Obviously,in Figure10(a)the diffractions are obscured by strong reflections.When the reflections are removed,a clear diffraction section,Figure10(c),stands out.After migration, Figure10(d),the accurate location of the sink is depicted.Note that the phase properties of the focused points reflect the characteristics of the different points in the sink structure. In this example,the reflection stacking velocity is used for stacking both reflections and diffractions.As Figure8demonstrates,the result can be improved if diffraction stacking velocities are used.3.3Example3Diffractions can reveal features that reflections cannot under normal resolution limitations. Figure11shows a special example.Figure11(a)and Figure11(c)are the stack section and migrated section respectively through conventional processing which takes into account both reflections and diffractions.The model consists of two reflecting horizons with thefirstwavelength.It horizon containing a tiny fault whose vertical throw is just1meter,or140should not be surprising that this fault is totally absent in Figures11(a)and Figure11(c)as it is far below the resolution limit.However Figures11(b)and Figure11(d),the diffraction stack section and the migrated diffraction section,respectively,clearly show the response of this fault.To further challenge the resolution potential of diffractions,we slightly modified the the model so that the vertical throw is-1meter which means the footwall and the hangingwall have been exchanged.The results are shown in Figure12(b)and Figure13(b).They are0.51.01.52.0t i m e (s )123456(a)00.51.01.52.0t i m e (s )123456(b)0.51.01.52.0t i m e (s )123456(c)00.51.01.52.0t i m e (s )123456(d)Figure 8:Comparison between stacking using reflection velocity and using diffraction velocity.(a)is thediffraction stack section stacked using reflection stacking velocity;(b)is the diffraction stack section stacked using diffraction stacking velocity;(c)is the poststack migrated section of (a);(d)is the poststack migrated section of (b).50010001500D e p t h (m )50010001500(a).0.51.01.5t i m e (s )(b)Figure 9:Sink model.(a)shows the model;(b)shows three shot gathers of the synthetic data of this model0.51.01.52.0t i m e (s )123456(a)00.51.01.52.0t i m e (s )123456(b)0.51.01.52.0t i m e (s )123456(c)00.51.01.52.0t i m e (s )123456(d)Figure 10:Stack section and migrated section of model (a)stack section;(b)poststack time migratedsection;(c)the stack section of extracted diffraction;(d)the poststack time migrated section of Figure (c)0.51.01.52.0t i m e (s )0.5 1.0 1.5 2.0(a)00.51.01.52.0t i m e (s )0.5 1.0 1.5 2.0(b)0.51.01.52.0t i m e (s )0.5 1.0 1.5 2.0(c)00.51.01.52.0t i m e (s )0.5 1.0 1.5 2.0(d)Figure 11:A tiny fault example.(a)the stack section which contains both reflections and diffractions;(b)the diffraction stack section only;(c)is the migrated section of (a),and (d)is the migrated section of (b).0.20.40.60.81.01.21.4t i m e (s )0.5 1.0 1.5 2.0(a)00.20.40.60.81.01.21.4t i m e (s )0.5 1.0 1.5 2.0(b)00.20.40.60.81.01.21.4t i m e (s )0.5 1.0 1.5 2.0(c)Figure 12:Diffraction stack sections of different tiny faults.(a)diffraction stack section of the fault with 1meter vertical throw,(b)diffraction stack section of the fault with -1meter vertical throw and (c)diffraction stack section of fault with zero vertical throw but has 1meter horizontal discontinuity.All figures show events above 1.5second.the stack section and migrated section respectively.In addition,Figure 12(d)and Figure 13(d)show the response of the similar model but the vertical throw is zero and the first reflection has a 1meter discontinuity at the same horizontal location as the other two models.Surprisingly,these three models that differ only slightly from each other,can be resolved and differentiated by means of the phase properties of the processed sections.Since there is no any difference in the conventional processed sections,they are not shown here.3.4Example 4Figure 14shows a classic geology structure,pinchout,example.The accurate determination of the edge of a pinchout is significant in data processing and interpretation.Figure 14(a)is the stack section of the pinchout.Figure 14(b)is the poststack time migrated section of Figure 14(a).Obviously,in Figure 14(a)the diffractions are obscured by prominent reflections.The exact edge of the pinchout is difficult to determine.When the reflections are removed,a clear diffraction section,Figure 14(c),results.After migration,Figure 14(d),the accurate location of the pinching-out point can be determined.0.20.40.60.8t i m e (s )0.5 1.0 1.5 2.0(a)00.20.40.60.8t i m e (s )0.5 1.0 1.5 2.0(b)00.20.40.60.8t i m e (s )0.5 1.0 1.5 2.0(c)Figure 13:Diffraction migrated sections of different tiny faults.(a),(b)and (c)are corresponding migratedsection of Figure 12(a),Figure 12(b)and Figure 12(c).All figures show events above 1.0second.3.5Dipping event examplesAs introduced and proved in previous sections that,although a dipping event in a shot gather is hyperbolic in shape,after NMO correction,it becomes linear.As seen in Figure 15,Figure 15(a)is the original shot gather that contains a flat reflection event,a dipping reflection event and a diffraction event.After NMO correction,as shown in Figure 15(b),the flat reflection event becomes a flat linear event and the dipping reflection event becomes a dipping linear event.Naturally,linear Radon transform was implemented to attenuate these events.Figure 15(c)shows the same data as in Figure 15(b)but in the linear Radon domain.As expected,those linear events which correspond to reflection events collapse to two dots.Simply muting out these dots,the reflections will be removed.However,we have to be careful,because those dots are not spikes in real data or even in this simple synthetic data that contains a small amount of noise.The noise,the finite aperture and banded spectra etc.are all factors which contribute to the specific patterns exhibited by the dots,as seen in Figure 15(d),which shows the same data as in Figure 15(c)but with different plot parameters to enhance the weak energy.This type of behaviour is also seen in multiple attenuation using the Radon transform.To overcome this problem,a special strategy has been developed,which is outlined below:•NMO correct the original data and then sort to shot gathers;0.51.01.52.0t i m e (s )123456(a)00.51.01.52.0t i m e (s )123456(b)0.51.01.52.0t i m e (s )123456(c)00.51.01.52.0t i m e (s )123456(d)Figure 14:Pinchout example.(a)stack section;(b)poststack time migrated section of (a);(c)the stacksection of extracted diffraction;(d)the poststack time migrated section of Figure (c)00.51.01.52.0t i m e (s )5001000offset(a)00.51.01.52.0t i m e (s )5001000offset(b)0.51.01.52.0t i m e (s )02004006008001000offset (c)00.51.01.52.0t i m e (s )02004006008001000offset (d)Figure 15:A single shot gather containing a dipping event.(a)The original shot gather;(b)After NMOcorrection;(c)After linear Radon transform;(d)The same as (c)except using different plot parameters to boost weak energy.•Apply linear Radon transform to each shot gather;•Manually or automatically pick the reflections in Radon domain;We actually developed an approach to automatically pick the points.•We then have two ways to go:(1).We have the approach:–From the picked points,we know the(τ,p)values and we can generate those linear events in the original(x,t)domain based on these values and the specified wavelets.–Apply the same linear Radon transform to the synthetic gather generated in the previous step.Thus,a similar patter in Radon domain of this synthetic gather to the pattern of the original data can be expected.For example,both events in (x,t)domain have the samefinite aperture.–Subtract the synthetic gather in the Radon domain from the the original data in the Radon domain entirely or just around the picked points.The latter is preferred because the synthetics may not be accurate.(2).If the reflection events have subtle variations or the wavelets can not be accurately estimated,the above procedure may not work well.In this case,another approach is:–From the picked points,knowing their(τ,p)values,we pick out the corresponding linear events in the original gather in the(x,t)domain based on these values and combine them together as a“picked gather”.Note that this is not a synthetic gather.Ideally,it has all the characteristics of the original reflections including the waveforms and apertures etc.–Apply the same linear Radon transform to the picked gather generated in the previous step.Thus,a similar pattern in the Radon domain of this gather to the pattern of the original data can be expected.–Subtract the picked gather in the Radon domain from the the original data in the Radon domain entirely or just around the picked points.The latter is preferred because of errors involved in any of the above steps.•Transform back to the(x,t)domain from the Radon space after subtraction.Figure16illustrate this procedure.Figure16(a)is the same as Figure15(d)except that the two reflection dots are simply muted.Figure16(b)and Figure16(c)show the result of the complicated muting introduced above.They differ only in the subtraction.The subtraction of Figure16(b)is carried on on entire section while,in Figure16(c)it is only done around the picked points.Note that the slant events in the plots are the diffractions.Figures16(d), 16(e)and16(f)are the corresponding gathers in the(x,t)domain to Figure16(a),16(b)and 16(c),respectively.Clearly,the new subtraction approach works much better than simple muting.Figure17shows a model with oneflat and two dipping events and the result of processing. The dipping events have opposite dip angles.Figure17(b)shows the stack section.Figure 17(c)shows the stack section processed by the linear Radon transform introduced above. Afterfiltering,the two diffraction events stand out clearly.4Real data exampleA real data example is given here in order to show what a real data diffraction section looks like.Figure18shows the conventional stack and post-stack time migrated sections of a 2D line from the Mississippi area,Gulf of Mexico.As expected,the salt top generates the strongest diffractions(at approximately3seconds).This is because the salt body has a large velocity contrast with the sediment environment and has many small fractures.The diffractions are so strong that even the multiples contain diffractions(at approximately4 and4.6seconds)which becomes a big challenge for multiple attenuation.Figure19shows the stack and post-stack time migrated diffraction sections.From thesefigures,we get a clear diffraction image.A huge amount of diffractions are seen at the top of the salt.The diffraction multiples are clear.In addition,a few diffractions close to the sea bottom(at2.2 seconds)are especially interesting.They clearly show the locations of the shallow faults that are obscured by the strong sea bottom reflections.Note the above post-stack time migrated sections are generated by F-K migration using constant velocity.5PSDM resultIn case accurate velocities are known,PSDM can always give better results.Here,PSDM can be applied to the extracted diffractions to obtain a superior image.0.51.01.52.0t i m e (s )02004006008001000o f f s e t (a )00.51.01.52.0t i m e (s )02004006008001000o f f s e t (b )0.51.01.52.0t i m e (s )020*******8001000o f f s et (c )0.51.01.52.0t i m e (s )5001000o f f s et (d )00.51.01.52.0t i m e (s )05001000o f f s e t(e )00.51.01.52.0t i m e (s )05001000o f f s e t (f )Figure 16:Illustration of a special approach for attenuating reflections.(a),(b)and (c)are in linearRadon domain and their corresponding figures in the (x,t )domain are shown in (e),(f)and (g)respectively.For detail,see context.。
高效液相色谱法同时测定苹果中9种多酚物质
基金项目:烟台大学青年基金资助(项目编号:HY06Z11)作者简介:杨建荣(1970-),女,烟台大学食品科学与工程研究所讲师。
E 2mail:edel w eissy@t 通讯作者:孙承锋收稿日期:2007-10-25第24卷第1期2008年1月Vol .24,No .1Jan .2008高效液相色谱法同时测定苹果中9种多酚物质HPLC m e tho d fo r s i m u ltaneo u s de te r m i na ti o n o f n i ne po l yp heno ls i n app l e杨建荣YAN G jian 2rong孙承锋SUN cheng 2feng(烟台大学食品科学与工程研究所,山东烟台 264005)(Institute of Food Science and Engineering,Yantai U niversity,Yantai,Shandong 264005,China )摘要:目的:利用HP LC 法同时测定苹果中9种多酚物质的含量;方法:色谱柱为C 18柱(150mm ×4.6mm,5μm ),以乙腈和醋酸—醋酸钠缓冲溶液为流动相,采用不同的流速和浓度梯度洗脱的分离条件,并用该方法测定印度青苹果中多酚的含量;结果:中性酚和酸性酚在该条件下得到很好的分离,分离度均大于1.5,该方法的加标回收率均在90%以上,相对标准偏差为1.2%~2.3%。
结论:该方法操作条件简单,结果准确可靠。
关键词:HP LC;多酚;苹果Abstract:O bjecti ve:Contents of nine kinds of polyphenol were deter 2m ined by HP LC;M ethod:The neutral phenol and the phenolic acids were separated in a C 18column (150mm ×4.6mm,5μm ).The mobile phase was acet onitrile /acetic acid -s odium acetate buffer on gradient e 2luti on at the different fl ow rate .Contents of polyphenol in the Yinduqing app le were deter m ined by this method;Result:The res oluti on is all above 1.5and the recovery rate exceeds 90%.The relative standard deviati on is 1.2%~2.3%;Conclusi on:This method is si m p le,accurate and relia 2ble .Keywords:H igh Perfor mance L iquid Chr omat ography;Polyphenol;App le苹果中除含有丰富的植物纤维、糖、矿物质、维生素等营养成分外,还含有一定量的酚类物质,苹果多酚是苹果中所含多元酚类物质的总称[1]。
多重波段高光谱成像的技术检测金冠苹果瘀伤—翻译1
多重波段高光谱成像技术检测金冠苹果瘀伤Juan Xing;Ce′dric Bravo;Pa′ l T. Jancso′ k;Herman Ramon;Josse De Baerdemaeker 农业机械和处理实验室,农业工程和经济学学院,鲁汶天主教大学艾伦伯格Kasteel公园30,b – 3001,比利时鲁汶;联系人的电子邮件juan.xing@agr.kuleuven.ac.be:2004年6月收稿,2004年11月出版摘要:在这个研究中,使用的潜在多光谱成像系统追究检测“金冠苹果”瘀伤。
为了这个目的,一个波段范围在400nm和1000nm的高光谱成像系统成立了。
基于高光谱成像的主成分分析,四个波段被选取了作为一个多光谱成像测试。
主成分分析多光谱图像在高光谱影像给了非常相似的结果。
第二个和第三个主成分组件分数图像被发现是适合标识瘀伤的存在的部位。
开发了基于阈值分析的一个图像处理和分类算法。
分类结果表明,使用示例数目的在这个实验中,大约93%的非瘀伤的苹果被辨别出来。
实现了约86%的精度检测瘀伤,虽然所有的受伤区域被发现仍然在图像阈值范围内显现出来。
关键词:苹果,跌打损伤,缺陷,近红外,高光谱成像,质量,光谱学1 引言擦伤是苹果在处理运输过程中发生的一个重大的皮肤缺陷。
水果外表的会影响消费者购买行为和外貌值。
因此,苹果有表面缺陷必须与非伤痕累累的苹果在进入商场之前必须进行分级操作。
最近可用商业分类系统以及存在各自不同程度的缺陷,但他们的能力检测suchsub 病变缺陷擦伤是仍然还是一个问题(Lu,2003)。
许多技术被用来研究自动检测苹果果实的伤痕和损伤。
机器视觉被广泛应用于水果业水果的大小进行排序和颜色的分类。
然而,这一排序系统存在一定的缺陷,比如在机器视觉仍然具有一个挑战性的问题。
商业在分拣系统中的缺陷,微笑的缺陷在跌打损伤仍然是一个问题,研究中发现,,可用于近红外光谱(NIRS)检测瘀伤苹果,因为新鲜的具有伤痕累累组织的苹果具有较低的反射率比正常的结构的苹果在短波区域近红外(VIS/NIR)约400-1000nm(brown等人,1974,;Geoola等人,1994年,厄普丘奇等人,1990年)。
Folin_Ciocalteu比色法测定苹果渣中的多酚
※分析检测食品科学2010, Vol. 31, No. 04 179Folin-Ciocalteu比色法测定苹果渣中的多酚韩菊,魏福祥(河北省污染防治生物技术实验室,河北科技大学环境科学与工程学院,河北石家庄050018)摘要:采用超临界CO2萃取技术从苹果渣中提取多酚,以没食子酸为标准物质,系统研究了Folin-Ciocalteu(FC)比色法测定多酚的条件,建立了Folin-Ciocalteu比色法测定苹果渣中多酚的方法。
适宜的显色条件为FC试剂用量0.3mL、饱和碳酸钠溶液用量1.5mL、反应时间20min、反应温度25~35℃。
结果表明:在1~10μg/mL范围内,没食子酸吸光度与其质量浓度呈良好的线性关系,r=0.9994;并进行了高、中、低3个不同加标水平的加标回收率测定实验,相应的回收率分别为99.66%、98.79%、98.20%,平均值为98.82%,RSD为1.93%。
该法测定样品快速、准确,重复性好,可应用于实际样品的测定。
关键词:多酚;Folin-Ciocalteu法;苹果渣;超临界CO2萃取Determination of Polyphenols in Apple Pomace by Folin-Ciocalteu ColorimetryHAN Ju,WEI Fu-xiang(Key Laboratory of Contaminant Controlling in Biology of Hebei Province, College of Environmental Science and Engineering,Hebei University of Science and Technology, Shijiazhuang 050018, China)Abstract:Folin-Ciocalteu colorimetric assay for polyphenols extracted from apple pomace by supercritical CO2 extractionusing gallic acid as reference substance was systematically investigated for developing an optimal colorimetric method for thedetermination of polyphenols in apple pomace. The optimum colorimetric conditions were determined as follows: 0.3 mL of Folin-Ciocalteu reagent, 1.5 mL of saturated Na2CO3 solution, 20 min of reaction time and 25-35 ℃of reaction temperature. Thecalibration curve for quantifying polyphenols exhibited a good linearity in the range of 1-10 μg/mL (r = 0.9994). The averagerecoveries of gallic acid at high, medium and low spike levels were 99.66%, 98.79% and 98.20% (n = 5), respectively, which werereaveraged at 98.82%, with a RSD of 1.93%. The proposed method demonstrates the advantages of rapidity as well as high accuracyand reproducibility.Key words:polyphenols;Folin-Ciocalteu colorimetry;apple pomace;supercritical CO2 extraction中图分类号:O657.32文献标识码:A文章编号:1002-6630(2010)04-0179-04苹果渣是果汁厂榨汁后的下脚料,其中含有丰富的研究上[3-6],而对苹果多酚测定的系统研究较少。
不同化学疏果剂对‘富士’苹果的疏除效果及品质影响
天津农$科学Tianjin Agricultural Sciences2021,27(3):17-24,28•作物栽培与设施园艺不同化学疏果剂对‘富士’苹果的疏除效果及品质影响王安丽李文胜周文静吴泽珍!,张振军2,胡安鸿"(1.新疆农业大学林学与园艺学院,新疆乌鲁木齐830052;2.阿克苏地8林业科学研究所,新疆阿克苏843000)摘要:对比不同化学疏果剂对‘红富士’苹果的疏除效果及成本,筛选出适宜阿克苏‘红富士’苹果的化学疏果剂及浓度,以减 少工人疏花成本,调控树体负载量,提升果品品质。
以盛果期‘新红1号’为试材,实采用正交试验设计方法果实6~8m m、10~12mm、14~16m m和18~20m m时喷施不同浓度西维因、萘乙酸、6-B A、疏果剂(山东),以人工疏果为对照,分析化学疏果剂 的疏除效果、成本以及对品质的影响。
同类同浓度的化学疏果剂疏除效果同,成本,对果实品质同。
过单果占比、双果占比、空台率、疏除率、果实横径和成本支出综合比较,盛果期树幼直径6!8m m时喷施800mg*L-1西维因的 疏除效果与人工疏果效果最相近,成本仅为人工疏果的13.080;幼果直径10~12m m时喷施1200mg*L-1的疏除效果与人工疏果效果最相近,成本为人工疏果的16.59%;幼果直径14!16m m时喷施400m g*L-1西维因效果与人工疏果效果最相近,成本为人工疏果的9.570;幼果直径18!20m m时喷施150m g •L-16-B A效果与人工疏果效果最相近,成本为人工疏果的 67.740。
对果实品质影响不显著。
关键词:富士苹果;化学疏果剂;果;本;品质中图分类号:S661.1文献标识码:A D O I 编码:10.3969/j.issn.l006 — 6500.2021.03.005Effects of Different Chemical Fruit Thinning Agents on the Fruit Thinning Effect and Quality of ;Fuji; Apple WANG Anli1,LI Wensheng1,ZHOU Wenjing1,WU Zezhen1,ZHANG Zhenjun2,HU Anhong2(1.College of Forestry and Horticulture, Xinjiang Agricultural University, Urumqi, Xinjiang 830052, China, 2. Aksu Regional Institute of Forestry Science, Aksu, Xinjiang 843000, China)Abstract: Comparison the effect and cost of chemical fruit thinners on ’red Fujiw apples, find suitable chemicals and its concentration which can well reduce costs and regulate the load and improve quality in Aksu. ’Xinhong No. K was used as the test material in the full fruit period. The orthogonal design method was used to spray different concentrations of carbaryl, NAA, 6-BA and fruit thinning agent (Shandong) on the fruit diameter of 6-8mm, 10-12 mm, 14-16 mm and 18-20 mm. The effect, cost and quality of chemical fruit thinning agent on the fruit thinning were analyzed. Different kinds and concentrations of chemical thinning agents have different thinning effects, different cost and different fruit quality# Through comprehensive comparison of single fruit set rate, double fruit set rate, empty fruit rate, flower thinning rate, fruit diameter and costs,when the fruit diameter was 6-8mm, high yield stage trees the effect of spraying 800 mg*L-1of Carbaryl was the closest to hand-thinned, and the cost was only 13.08% of the hand-thinned;when the fruit diameter was 10-12 mm, the effect of spraying 1200 mg*L-1of Carbaryl was the closest to the hand-thinned, and the cost was 16.59% of hand-thinned; the effect of spraying 400 m g*L-1of Carbaryl on 14-16 mm fruit was the closest to the effect of h an d- thinned, the cost was 9.57% of the hand-thinned; the effect of spraying 150 mg*L-16-B A on 18-20 mm was similar to the effect of hand-thinned, and the cost was 67#740 of hand-thinned# The main quality of the fruit was not significant difference#Key words:’Fuji’ apple; chemical thinning agent; fruit setting rate; cost; quality苹果 的水果,以 富,果,人,量 ]1]。
上海苹果味道与香料成分 weighing 和分析实验室 6 优化湿度控制保证优质品质 上海苹果味道与
NewsFlavors &IngredientsWeighing and Analysis in the Laboratory6Optimal Moisture Control Guarantees Excellent QualityShanghai Apple Flavour & Fragrance Co., Ltd. is one of the industry leaders in China manufacturing food flavours, fragrances and food ad-ditives amongst other things. The company relies on METTLER TOLEDO’s Halogen Moisture Analyzer and Karl Fischer Titrator to determine mois-ture content for the production of their 5,000 product varieties.Quality Control of Flavours & FragrancesFlavours and fragrances can be divided into many types, such as water soluble, oil soluble, emulsions and powders with very different characteristics. Before a new product may be introduced onto the market, quality control parameters such as refractive index, density index, perox-ide value, granularity, pH value and mois-ture content have to be determined. One of the most frequently measured indexes is moisture content as excessive moisture can cause powder flavour to agglomerate. Stable moisture content needs to be en-sured to maintain the consistent quality of each product batch.Moisture Control of Solid Flavours The quality control lab of Shanghai Apple uses an HG53 Halogen Moisture Analyzer to measure the moisture content of solid aromas. The analysis process is very sim-ple: first, mix the sample, set the mois-ture analyzer, weigh a certain volume of sample into the aluminium sample pan and distribute evenly, then press the ‘start’ key to measure. The circular halo-gen lamp and gold-plated reflector ensure the repeatability and fast heating of the sample. Testing time is greatly reduced from several hours to less than 10 min-utes in comparison with the conventional drying oven method. The quality control lab’s level of efficiency is therefore greatlyimproved.2METTLER TOLEDO Flavors & Ingredients News 6PublisherMettler-Toledo AGLaboratory & Weighing Technologies Im LangacherCH-8606 Greifensee, Switzerland ProductionSegment Marketing LAB SwitzerlandTechnical articles Mettler-Toledo AG– Laboratory & Weighing Technologies – Analytical Instruments 11794294 40.12Subject to technical changes. © Mettler-Toledo AG 08/01 Printed in Switzerland.M o i s t u r e C o n t r o lMoisture Control of Liquid FlavoursFor liquid flavours, such as water soluble and oil sol-uble flavours, Shanghai Apple uses METTLER TOLEDO‘s DL38 Karl Fischer titrator to conduct moisture control analysis. The Karl Fischer titrator’s re-agent will directly react with the water in the sample making it the most accurate chemical method for measuring sub-stance water content. In the laboratory, the Karl Fischer titrator is connected to a printer and LabX software for instrument control and data management.“The K a r l Fischer titrator has many advan-tages. For example,it can test a wide range of samples and moisture contents with rapid, accurate and highly repetitive results”, says Huang Yanbin, manager of the Quality Control Dept. “When connected to a METTLER TOLEDO printer, the test report and mea-surement are fully in compliance with GLP regulations. This, in connection with the LabX software can realize real-timemonitoring, analyze and evaluate a large quantity of results.”Our customer also uses our fully auto-matic titrator and density meter to ana-lyze the ingredients of raw materials, the density of flavours and fragrances and to guarantee the safety and stability of their products.Take a look at the successor to the HG53, the HG63, fulfils all the above require-ments and many more besides.} /moisture } /Karl-fischerMETTLER TOLEDO F o r m u l a W e i g h i n gEfficient Formula WeighingWith XP Balances & LabX SoftwareFormula weighing-in the food and flavor industry requires high accuracy so that each batch of finished products is of exactly the same quality. Simultaneously, all the report and data requirements need to be met in order to be easily traced and documented to conform to GxP. METTLER TOLEDO’s XP Precision Balance together with LabX software trans-forms the traditional formula weighing process into a powerful data system.Right Mixture is EverythingRegardless of which flavorings are in-volved, formulation requires precision. In-correct mixtures are costly and may even be disastrous. Irrespective of the complex-ity of formulas, materials or quantities, METTLER TOLEDO’s formula weighing solutions can fulfil all the requirements. Right from preparing formulae mixtures to documenting their composition, for-mula weighing has never been so easy and assured. Eight recipes, each with up to twelve components, can be stored in the balance and called up conveniently at the touch of a fingertip on the SmartScreen. Clear instructions and color-coded weigh-ing aids guide you step by step through the formula weighing. Maximum security is assured by the FormCheck function which only allows uniquely identified samples into the formula. In addition, formulae can be weighed horizontally, vertically or in batches.Powerful SoftwareThe traceability of sample identities and weighing data is a growing requirement for fulfilling regulatory compliance and increasing lab efficiency. This is especial-ly relevant when weighing valuable raw materials to produce mixtures according to a defined recipe or experimenting withvariations on a master recipe. In such a case, working with a stand-alone balance or balance applica-tion no longer fulfils the complexity of these tasks.METTLER TOLEDO’s LabX balance PC-based software uses a powerful lean in-terface with the same user philosophy from other Windows office software pack-ages. This means that the full software potential can be recognized right from the start.Documenting the weighing takes only a keystroke. If required, each component can be identified with alphanumeric identification. Other key features are:nSimultaneous weight capture from multiple balances connected directly to the networkn User-definable totalization applica-tion stored as a job templaten Full user guidance on the balance display and PCn Comprehensive report, including the ingredient identities, sum of ingredi-ents and weighing parameters n All data securely stored in a SQL server database} /xp } /labx4O n e C l i c k T i t r a t i o n ™METTLER TOLEDO Flavors & Ingredients News 6Four Steps toSuccessful Titration AutomationStep 1 ThroughputIn Givaudan’s quality control lab in their headquarters in Geneva, more than 1,500 raw materials for perfumes are produced and analyzed. 30 titrations per day are performed to determine ketones, al-dehydes, esters, lactones, halogenides, amines or the base index. The Rondo 20 sample changer makes this throughput possible. Up to 20 samples are placed on one sample changer with analyses also being performed during the night, which elongates a normal working day for Givaudan to 24 hours!Step 2 PreparationMany of the redox titrations require in-tensive sample preparation. The complete oxidation can only be achieved if the sam-ple is heated up to 70°C between 10 min and 2h, depending on the sample type. This step used to require much manual work and time. The heating unit DH100 now takes care of everything controlled by the titrator. After the addition of the oxidizing agent it automatically heats the sample up to the required temperature for the defined time according to the method. Afterwards the titration is started imme-diately.The quality control laboratory of Givaudan in Geneva requires a power-ful titration application for high sample throughput and fast and reliable results without user intervention. Read on and find out how METTLER TOLEDO reduces their laboratory’s response time from 2 days to only a few hours with their automated titration system.Step 3 ProtectionDue to the nature of the products, most of the samples have a strong odor and the laboratory environment must be pro-tected against it. Many samples are also highly sensitive to oxida-tion by the ambient air. Therefore, the sample must be closed before titration. How can this happen when the samples are placed on the sample changer some hours before titration? CoverUp™, the smart lid handling de-vice, has the answer: A magnetic cover is placed on every sample beaker. Immedi-ately before titration it is lifted up and after titration released back onto the beaker again. This protects samples and operators alike.The CoverUp™ lid handling device protects samples and environmentMETTLER TOLEDO Flavors & Ingredients News 6Step 4 Result documentationMany sample analyses yield many results. The management of the documentation can be a demanding task that should beautomated using PC software. LabX titration gives the operators total control over the titration systems and collects all the different data in one common database where it is safely stored and always available for review. The common method database guarantees that the same analysis can be performed on different instruments with results still being comparable.Sylvain Plagellat, the head of the analyti-cal control laboratory at Givaudan Suisse SA in Geneva, made these four steps to titration automation. “Using the auto-mated titration systems we could signifi-cantly improve the quality, repeatability and speed of our analyses”. The labora-tory can now reduce the average response time from two days to a few hours. This also speeds up the complete production process because the batches can be re-leased much faster. Sylvain Plagellat just received another titration system with a T90 Excellence titrator and a Rondo 60 sample changer for fully automated sam-ple aliquotation. Together with METTLER TOLEDO, Givaudan is ready to take the next step in automation.} /one-click-titrationThe titration system with accessories are optimized to require only a minimum of user interaction(Source: Collected Applications - Food)6D S CMETTLER TOLEDO Flavors & Ingredients News 6Packaging Quality Increases Consumer SatisfactionFood packaging may significantly affect the quality of food and there-fore have a profound impact on the product as well as on consumer convenience and satisfaction. METTLER TOLEDO’s TGA ensures packing material quality for the food & flavor industries.Packaging has multi-functions, such as protecting the product from spoiling, -odors and flavors, as well as physical protection during transport. High demands are placed on the materials to produce acceptable and suitable food packaging products. The properties required include:n mechanical flexibility and strength n compatibility with the productn low diffusivity against gases (such as oxygen or moisture)n thermal stabilityInvestigating the decomposition behaviourThe polypropylene film in question contained bis(methylbenzylidene)sorbitol (BMBS) as a crystallization agent. This additive favors the formation of nucleation centers for polypropylene and improves the desired optical transparency of the pack-age. A possible source of the odd almond flavor of the pineapples was identified as p-methylbenzaldehyde (PMB).The obvious question was therefore whether PMB was formed at the packaging process tempera-ture through the decomposition of BMBS. The TGA/DSC 1 curve in Figure 1 exhib-The example below demonstrates how thermogravimetric analysis (TGA) in com-bination with mass spectrometry (MS) can be used to investigate the origin of an odd almond flavor in pineapples packaged in polypropylene film material. During the packaging process, the polypropylene film is slowly heated to 250 °C.its mass loss indicating decomposition of the material from about 250 °C onward. Simultaneously recorded MS curves for masses characteristic for PMB (m/z 120 and m/z 91), show that PMB is evolved above 250 °C. This suggests that the BMBS additive (used to optimize the transparency of the packaging material) is the ultimate source of the PMB.The combination of the TGA/DSC 1 and a mass spectrometer is a powerful tool for investigating the decomposition behavior of polypropylene films used for food pack-aging. In addition, the TGA/DSC 1 provides benefits such as outstanding thermogravi-metric measurement performance, simul-taneous calorimetric analysis and manual or automated operation. It is therefore an extremely useful instrument for research and development, quality control and for the ultimate goal of improving consumer satisfaction.} /DSC7 METTLER TOLEDO Flavors & Ingredients News 6Mettler-Toledo AGLaboratory & Weighing Technologies Im LangacherCH-8606 Greifensee, SwitzerlandMettler-Toledo AGAnalytical Instruments Sonnenbergstrasse 74CH-8603 Schwerzenbach, Switzerland Your METTLER TOLEDO contact:For more informationWeighing Solutions and Analytical InstrumentsNew Products and Technologies From METTLER TOLEDOMETTLER TOLEDO delivers powerful solutions that simplify work in labo-ratories around the world. Combining our state-of-the-art technologies with our applicative competence, we have a strong value proposition to make: accurate results and productivity second to none.E-Man Hybrid From RAININ –The future of manual pipetting – today!By combining the simplicity of a manual pipette with the added features and benefits of an elec-tronic pipette, such as an electronic real-time display and added features like a cycle counter or maintenance and technique alert, the E-Man Hybrid brings together the advantages of both systems in one great product. /e-manFabulous Food Thanks to New Portable Brix metersThe portable Quick-Brix™ 60 and 90 are ideal for anybody in the agricultural and food industry who needs to measure sugar content (Brix) sim-ply, reliably and in a cost effective manner. The instruments are ideal for determining the optimum harvesting times of fruit and vegetables and the optimum quality of food ingredients, such as honey, jam or sugar levels, in /quickbrixThe Next Level of One Click Titration™The new version 2 of the Titration Excellence line offers many improvements that make titra-tion simpler, more efficient and secure. The new Rondo 30 sample changer flexibly handles com-plex titration procedures and saves your precious samples due to a smaller beaker volume. The powerful LabX titration PC software gives total control and saves all data in the database. Find out about all other advantages and improvements of One Click Titration™!/one-click-titrationPlug & Play Titration SensorsEnsuring the Right Aroma of FlavoursA comprehensive range of 17 Plug & Play pH glass, platinum and silver titration sensors is now available. The sensors cover the entire applica-tions spectrum from routine pH measurements to special titrations in difficult sample matrices. The sensor chip in the electrode head stores all relevant data which is automatically read into the titrator setup when the sensor is connected. The design has been optimized for faster response times and signal equilibration as well as for rug-gedness and durability to achieve reliable results in a multitude of sample matrices./one-click-titration。
高光谱技术在苹果品质检测中的应用
安徽农学通报,Anhui Agri,Sci,Bull,2021,27(01)高光谱技术在苹果品质检测中的应用任显丞1张晓1,2*彭步迅1李疆1王家硕1(1塔里木大学信息工程学院,新疆阿拉尔843300;2新疆南疆农业信息化研究中心,新疆阿拉尔843300)摘要:高光谱技术作为新一代的光电无损检测技术,广泛应用于农产品快速无损品质检测。
高光谱技术在苹果品质检测方面主要有2个方向,结合化学计量学方法进行苹果内部品质检测以及结合机器视觉进行苹果损伤、病害等外部指标的外部品质检测。
该文介绍了高光谱技术在苹果品质检测中的应用,提出了高光谱技术在苹果品质检测中存在的问题。
关键词:高光谱;苹果;内外部品质;无损检测中图分类号TS255.7文献标识码A文章编号1007-7731(2021)01-0132-02随着人们健康生活观念的建立以及水果产后处理技术的发展,苹果作为水果代表,其内外部品质的检测愈发受到重视。
传统的苹果内部品质检测依靠化学计量法,对苹果进行采样检测化学成分,实验操作繁琐、检测成本高等,高光谱技术既可利用可见光区域图像来检测外部品质,又可以利用近红外区域的图像来检测内部品质,该技术的出现有效解决了无损检测的难题。
1高光谱技术概述高光谱技术于上世纪80年代初期兴起,是新一代的光电无损检测技术。
通过对样品光谱信息的测量,可在一定程度上反映被测样品内部的物理结构和化学成分的差异,具有较高的分辨率,可获得连续的波段窄的光谱信息。
此外,高光谱设备操作简单,分析成本较低且不会对被检测对象造成破坏。
该技术早期主要应用于空间遥感,随着科学技术的进步发展,高光谱已经应用于农产品检测等领域,并且都取得了一定的研究成果。
目前,国内外众多专家学者利用高光谱来进行温室黄瓜病害早期检测[1]、大米种类鉴别[2]、高粱掺假无损检测[3]、互米花草营养成分反演[4]、绿萝叶绿素含量检测[5]以及牛肉品质检测[6]等内外品质的检测。
利用高光谱微分方法检测苹果轻微损伤
利用高光谱微分方法检测苹果轻微损伤尤笛;蒋金豹;张政;汪国平【摘要】为快速有效检测不同品种苹果轻微损伤,以‘金冠’、‘花牛’、‘富士’和青苹果各54个轻微损伤果为研究对象,采用高光谱图像技术获得各个苹果可见-近红外(400~1 000 nm)波段的图像,结合光谱微分技术选取波谷的9个波长(556、617、664、706、763、832、880、906、938 nm)为特征波长,然后基于特征波长进行最小噪声分离(Minimum Noise Fraction,MNF)变换,筛选出苹果轻微损伤的特征图像并通过阈值分割、形态学运算等方法识别苹果轻微损伤部位.结果表明,该方法识别‘金冠’、‘花牛’、‘富士’和青苹果轻微损伤部位的准确率分别为92.6%、88.9%、85.2%、85.2%.由此可见,利用高光谱微分方法可以快速有效地检测不同品种的苹果轻微损伤,且苹果的颜色越深、硬度越大、纹理越杂乱,检测精度越低.【期刊名称】《福建农业学报》【年(卷),期】2016(031)002【总页数】6页(P151-156)【关键词】苹果轻微损伤;高光谱成像;光谱微分;最小噪声分离;特征波段【作者】尤笛;蒋金豹;张政;汪国平【作者单位】中国矿业大学(北京)地球科学与测绘工程学院,北京 100083;中国矿业大学(北京)地球科学与测绘工程学院,北京 100083;中国矿业大学(北京)地球科学与测绘工程学院,北京 100083;中国矿业大学(北京)地球科学与测绘工程学院,北京100083【正文语种】中文【中图分类】TS255苹果在采摘、运输等过程中由于外力作用不可避免损伤。
苹果轻微损伤不仅影响美观,还会随着时间的推移慢慢腐烂,感染其他优质果[1]。
轻微损伤常发生在表皮下,其外表和正常果相似,在形成初期肉眼不易识别。
传统的人工挑拣和化学检测方法,不仅费时费力还有破坏性[2]。
高光谱成像技术集图像和光谱信息于一体,弥补了传统检测方法的缺点,它既可以反映外部品质,也可以检测出水果内部品质。