历年电子设计大赛题目_共10篇.doc
历届电子设计大赛题目(一至六)1994-2003

第一届(1994年)全国大学生电子设计竞赛题目题目一简易数控直流电源一、设计任务设计出有一定输出电压范围和功能的数控电源。
其原理示意图如下:二、设计要求1.基本要求(1)输出电压:范围0~+9.9V,步进0.1V,纹波不大于10mV;(2)输出电流:500mA;(3)输出电压值由数码管显示;(4)由“+”、“-”两键分别控制输出电压步进增减;(5)为实现上述几部件工作,自制一稳压直流电源,输出±15V,+5V。
2.发挥部分(1)输出电压可预置在0~9.9V之间的任意一个值;(2)用自动扫描代替人工按键,实现输出电压变化(步进0.1V不变);(3)扩展输出电压种类(比如三角波等)。
三、评分意见项目得分基本要求方案设计与论证、理论计算与分析、电路图30实际完成情况50总结报告20 发挥部分完成第一项 5完成第二项15完成第三项20题目二多路数据采集系统一、设计任务设计一个八路数据采集系统,系统原理框图如下:主控器能对50米以外的各路数据,通过串行传输线(实验中用1米线代替)进行采集的显示和显示。
具体设计任务是:(1)现场模拟信号产生器。
(2)八路数据采集器。
(3)主控器。
二、设计要求1.基本要求(1)现场模拟信号产生器:自制一正弦波信号发生器,利用可变电阻改变振荡频率,使频率在200Hz~2kHz范围变化,再经频率电压变换后输出相应1~5V直流电压(200Hz对应1V,2kHz对应5V)。
(2)八路数据采集器:数据采集器第1路输入自制1~5V直流电压,第2~7路分别输入来自直流源的5,4,3,2,1,0V直流电压(各路输入可由分压器产生,不要求精度),第8路备用。
将各路模拟信号分别转换成8位二进制数字信号,再经并/串变换电路,用串行码送入传输线路。
(3)主控器:主控器通过串行传输线路对各路数据进行采集和显示。
采集方式包括循环采集(即1路、2路……8路、……1路)和选择采集(任选一路)二种方式。
电子设计大赛控制类题目汇总

全国大学生电子设计竞赛历年题目(1994-2011)第一届(1994年)全国大学生电子设计竞赛题目题目三简易无线电遥控系统一、任务设计并制作无线电遥控发射机和接收机.1.无线电遥控发射机2.无线电遥控接收机二、要求1.基本要求(1)工作频率:fo=6~10MHz中任选一种频率.(2)调制方式:AM、FM或FSK……任选一种.(3)输出功率:不大于20mW(在标准75Ω假负载上).(4)遥控对象:8个,被控设备用LED分别代替,LED发光表示工作.(5)接收机距离发射机不小于10m.2.发挥部分(1)8路设备中(de)一路为电灯,用指令遥控电灯亮度,亮度分为8级并用数码管显示级数.(2)在一定发射功率下(不大于20mW),尽量增大接收距离.(3)增加信道抗干扰措施.(4)尽量降低电源功耗.注:不能采用现成(de)收、发信机整机.三、评分意见电子设计大赛控制类题目汇总·控制类(de)题目均要注意外界(de)干扰.要采取一定(de)屏蔽措施.·涉及到电机时要考虑控制部分和电机部分,分开供电.双电源供电.将电动机驱动电源与单片机以及其周边电路完全隔离,利用光电耦合传输信号.这样做虽然不如单电源方便灵活,但可以将电动机所造成(de)干扰彻底消除,提高了系统稳定性.·掌握各种算法.第三届(1997年)C题水温控制系统一、任务设计并制作一个水温自动控制系统,控制对象为1升净水,容器为搪瓷器皿.水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定(de)温度基本不变.二、要求1.基本要求(1)温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃.(2)环境温度降低时(例如用电风扇降温)温度控制(de)静态误差≤1℃.(3)用十进制数码管显示水(de)实际温度.2.发挥部分(1)采用适当(de)控制方法,当设定温度突变(由40℃提高到60℃)时,减小系统(de)调节时间和超调量.(2)温度控制(de)静态误差≤℃.(3)在设定温度发生突变(由40℃提高到60℃)时,自动打印水温随时间变化(de)曲线.三、评分意见四、说明(1)加热器用1千瓦电炉.(2)如果采用单片机控制,允许使用已右(de)单片机最小系统电路板(3)数码显示部分可以便用数码显示模块.(4)测量水温时只要求在容器内任意设置一个测量点.(5)在设计报告前附一篇400字以内(de)报告摘要.赛题分析:一、赛题要点:水温(de)范围水温调节(de)误差水温变化(de)速度打印水温变化(de)曲线二、参考设计方案1、水温(de)测量.温度传感器(参考型号AD590K)2、加热水.用脉冲移相触发可控硅来调节加热丝有效功率.3、控制算法.采用分段非线性加积分分离PI算法进行温度控制.模糊控制算法三、一些设计中(de)创新1、加入报警装置,当温度变化过大时,报警.2、通过键盘在线打印曲线与数据.3、加入语音模块.四、设计中(de)注意事项若采用1000w电炉加热1L水,控制对象(de)数学模型难以准确确定,所以要通过实验总结其控制特性,以确定控制算法(de)各项参数.第五届(2001年)C题自动往返电动小汽车一、任务设计并制作一个能自动往返于起跑线与终点线间(de)小汽车.允许用玩具汽车改装,但不能用人工遥控(包括有线和无线遥控).跑道宽度,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于20cm.在跑道(de)B、C、D、E、F、G各点处画有2cm宽(de)黑线,各段(de)长度如图1所示.二、要求1.基本要求(1)车辆从起跑线出发(出发前,车体不得超出起跑线),到达终点线后停留10秒,然后自动返回起跑线(允许倒车返回).往返一次(de)时间应力求最短(从合上汽车电源开关开始计时).(2)到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差应最小(以车辆中心点与终点线或起跑线中心线之间距离作为偏差(de)测量值).(3)D~E间为限速区,车辆往返均要求以低速通过,通过时间不得少于8秒,但不允许在限速区内停车.2.发挥部分(1)自动记录、显示一次往返时间(记录显示装置要求安装在车上).(2)自动记录、显示行驶距离(记录显示装置要求安装在车上).(3)其它特色与创新.三、评分标准四、说明(1)不允许在跑道内外区域另外设置任何标志或检测装置.(2)车辆(含在车体上附加(de)任何装置)外围尺寸(de)限制:长度≤35 cm,宽度≤15cm.(3)必须在车身顶部明显标出车辆中心点位置,即横向与纵向两条中心线(de)交点.赛题分析一、题目要点1、要求往返一次(de)时间最短,中间有限速区,接近终点也要减速,故要时时对小车(de)速度进行调整.2、限速区低速通过,接近终点要减速.故要准确判断加速减速(de)区域,即要精确定位.3、前轮方向要有纠偏装置,防止小车撞到挡板.4.、车速、行驶距离要显示.二、参考设计1、控制系统.采用两片单片机分工协作.2、车速和距离(de)检测.检测仪器应安装在前轮.因为后轮刹车时易打滑和反转.○1断续式光电开关.由于该开关是沟槽结构,可以将其置于固定轴上,再在车轮上均匀地固定多个遮光条.让其恰好通过沟槽,产生一个个脉冲.通过脉冲(de)计数,对速度进行测量.○2开关式霍尔传感器.该器件内部由三片霍尔金属相组成,当磁铁正对金属板时,出于霍尔效应,金属板发生横向导通,因此可以在车轮上安装磁片、而将霍尔集成片安装固定在轴上,通过对脉冲(de)计数进行车速测量.○3光电码盘.3、路面黑线检测.○1脉冲调制(de)反射式红外发射—接收器○2光电传感器.传感器(de)放置位置可以使小车底部(de)前中后,也可以是小车前面.根据不同(de)位置,采用不同(de)算法分析.4、停车方案.满速前进,临近终点反向制动.到终点后再反向制动断电即停.5、限速方案.反向制动-----正向驱动-----反问驱动------正向驱动(de)循环驱动过程.该方案通过单片机精确(de)驱动信号,使反向制动时间小于正向驱动时间,以达到小车总体向前缓速前进.6、避免小车碰壁(de)方案.○1超声波传感器.超声波传感器可以给CPU提供足够精确(de)位置信息,使得CPU可以根据该信息精确调整小车(de)运行方向和状态,使小车在运行时达到最小(de)横向抖动.单片机根据发射和接收到超声波(de)时间差判断小车离挡板(de)长度,根据这个数据发出前轮左转、右转或保持方向(de)指令.从而实现自动校正行车路线,少撞墙而快速地往返.○2光电传感器完成对左右挡板(de)检测.同时为了减小车与挡板相撞时(de)摩擦,可以在车体(de)四个角加装四个小滑轮.三、设计中(de)亮点1、加入语音模块.2、可以用实验(de)方法确定脉冲宽度(de)工作频率.3、加装车灯,指示行驶状态.4、刹车时,加入自动防抱死(ABS)环节.第六届(2003年)简易智能电动车(E题)一、任务设计并制作一个简易智能电动车,其行驶路线示意图如下:二、要求1、基本要求(1)电动车从起跑线出发(车体不得超过起跑线),沿引导线到达B点.在“直道区”铺设(de)白纸下沿引导线埋有1~3块宽度为15cm、长度不等(de)薄铁片.电动车检测到薄铁片时需立即发出声光指示信息,并实时存储、显示在“直道区”检测到(de)薄铁片数目.(2)电动车到达B点以后进入“弯道区”,沿圆弧引导线到达C点(也可脱离圆弧引导线到达C点).C点下埋有边长为15cm(de)正方形薄铁片,要求电动车到达C点检测到薄铁片后在C点处停车5秒,停车期间发出断续(de)声光信息.(3)电动车在光源(de)引导下,通过障碍区进入停车区并到达车库.电动车必须在两个障碍物之间通过且不得与其接触.(4)电动车完成上述任务后应立即停车,但全程行驶时间不能大于90秒,行驶时间达到90秒时必须立即自动停车.2、发挥部分(1)电动车在“直道区”行驶过程中,存储并显示每个薄铁片(中心线)至起跑线间(de)距离.(2)电动车进入停车区域后,能进一步准确驶入车库中,要求电动车(de)车身完全进入车库.(3)停车后,能准确显示电动车全程行驶时间.(4)其它.三、评分标准试数据及测试结果分析实际完成情况50发挥部分完成第(1)项15 完成第(2)项17 完成第(3)项8 其它10四、说明1、跑道上面铺设白纸,薄铁片置于纸下,铁片厚度为~.2、跑道边线宽度5cm,引导线宽度2cm,可以涂墨或粘黑色胶带.示意图中(de)虚线和尺寸标注线不要绘制在白纸上.3、障碍物1、2可由包有白纸(de)砖组成,其长、宽、高约为50cm12cm6cm,两个障碍物分别放置在障碍区两侧(de)任意位置.4、电动车允许用玩具车改装,但不能由人工遥控,其外围尺寸(含车体上附加装置)(de)限制为:长度≤35cm,宽度≤15cm.5、光源采用200W白炽灯,白炽灯泡底部距地面20cm,其位置如图所示.6、要求在电动车顶部明显标出电动车(de)中心点位置,即横向与纵向两条中心线(de)交点.赛题分析一、题目要点1、小车(de)尺寸限制.2、全程行驶时间限制,弯道速度要适宜.3、检测到薄片且能显示金属薄片到起跑线(de)距离.4、在C处停留5秒,停车期间发出断续(de)声光信息计时.5、停车后,显示全程行驶时间.6、注意到障碍物高6厘米,而光源高20厘米.二、参考设计整个系统可以分为以下几个模块:线路跟踪金属检测光源检测避障电路路程计算模块1、路程计算.○1光电传感器○2霍尔开关(霍尔传感器)2、线路跟踪.○1脉冲调制(de)反射式红外发射接收对管.启动时,小车跨骑在黑线上.两个红外发射接收对管,分别安装在黑线(de)两侧(de)白色区域,输出为低电压,当走偏,位于黑线上时,输出为高电压.因黑线较窄(2cm),为及时调整车(de)方向,选择比较器(de)阀值为,即黑白相间(de)位置,即开始调整.○2光电传感器.用三只光电开关.一只置于轨道中间,两只置于轨道外侧,当小车脱离轨道时,即当置于中间(de)一只光电开关脱离轨道时,等待外面任一只检测到黑线后,做出相应(de)转向调整,直到中间(de)光电开关重新检测到黑线(即回到轨道)再恢复正向行驶.○3色标传感器.在小车(de)中部平行装有两个色标传感器,采用查询检测(de)方法对黑线进行检测3、金属检测.○1电感式接近开关.当金属物体接近开关(de)感应区域,开关就能无接触,无压力、无火花、迅速作出反应○2金属探测传感器(涡流型铁金属探测传感器,参考型号LJ18A3-Z/BX)4、光源检测.光敏电阻(光敏传感器).只用三到五只光敏电阻就可以达到目(de),只是因其对光非常敏感,所以必需为每只光敏电阻加上黑色隔离板.在各光敏电阻间用隔板隔开如此摆放可以很好(de)解决探测光源方位(de)难题,从而正确控制小车(de)转向.当小车行驶方向朝向光源时,中间电阻阻值为低,当小车偏移光源方向时,由于光敏电阻间挡板(de)遮拦作用,两侧(de)电阻定有一侧为低.参考摆放位置如下图5、避障电路.注意到障碍物高6厘米,而光源高20厘米.故设计避障电路时,可以先寻找光源,当找到光源后,再检测障碍物,调整前进方向.这样做,可以节省时间.○1超声波测距.采用超声波传感器探测障碍物.超声波传感器安装于小车前端,在规定(de)检测距离内,当探测到障碍物时,超声波传感器给出脉冲信号至单片机,单片机检测到该信号后,调整小车方向,以控制小车准确(de)绕过障碍物.○2反射式红外传感器○3采用试验(de)方法,确定一条比较精确(de)路线,让单片机记住(通用性差,但节省时间)三、设计中(de)一些亮点发挥1、因为涉及(de)模块比较多,故要用多片单片机协作工作.最好增加一个时钟模块,统一系统时间.2、软件降温.在长转弯过程中通过设置前端转向电机间隙停转以达到降温(de)目(de).3、弯道要减速.4、增加车顶彩灯等装饰,更加人性化.附:参考元件安装方位第七届(2005年)悬挂运动控制系统(E题)一、任务设计一电机控制系统,控制物体在倾斜(仰角≤100度)(de)板上运动.在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮(de)吊绳控制一物体在板上运动,运动范围为80cm×100cm.物体(de)形状不限,质量大于100克.物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹.板上标有间距为1cm(de)浅色坐标线(不同于画笔颜色),左下角为直角坐标原点,示意图如下.二、要求1、基本要求:(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm(de)范围内作自行设定(de)运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;(3)控制物体作圆心可任意设定、直径为50cm(de)圆周运动,限300秒内完成;(4)物体从左下角坐标原点出发,在150秒内到达设定(de)一个坐标点(两点间直线距离不小于40cm).2、发挥部分(1)能够显示物体中画笔所在位置(de)坐标;(2)控制物体沿板上标出(de)任意曲线运动(见示意图),曲线在测试时现场标出,线宽~,总长度约50cm,颜色为黑色;曲线(de)前一部分是连续(de),长约30cm;后一部分是两段总长约20cm(de)间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他.三、评分标准四、说明1、物体(de)运动轨迹以画笔画出(de)痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;2、若在某项测试中运动超过限定(de)时间,该项目不得分;3、运动轨迹与预期轨迹之间(de)偏差超过4cm时,该项目不得分;4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开始运动后,不能再人为干预物体运动;5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸)测试时自带.赛题分析:一、题目要点要求概述:寻点画线画圆画一般曲线寻轨1、板是倾斜(de),则在考虑物体(de)运动时只考虑一边即可.2、悬挂物体(de)质量>=100g,要考虑电机(de)功率是否满足.3、各种运动均有时间限制,则要考虑控制系统(de)运算速度是否能够满足.4、因为涉及平面上(de)运动,画直线、圆等,要多多结合数学知识.二、设计系统时(de)注意事项:1、误差(de)分析与补偿.误差来源有,电动机(de)惯性、绳子(de)收缩、坐标(de)计算等.补偿方法有多次测量后修改程序中(de)参数,通过程序修正;选用材料时使用到对系统影响小(de);采用更优(de)算法.2、电机(de)保护.可以在L298N外围接续流二极管,保护电机.3、考虑光电传感器(de)灵敏度问题,加比较器,使输出一致.三、设计参考1、寻点画线采用数学上(de)坐标间(de)关系,计算出两条绳子收放(de)长度,进而转换为步进电机(de)转数.2、画圆○1采用多边形逼近方法,等分圆周,计算出每一点(de)坐标值,利用画直线(de)方法画每一小段.○2也是分割(de)思想,不过是分割圆(de)转角,一般以1°为单位分割,计算从起点到终点每隔1°(de)点(de)直角坐标.3、寻迹○1采用红外对射光电传感器检测黑色轨迹,安装于物体(de)边上.○2采用红外对射光电传感器检测黑色轨迹,安装于物体(de)底部.○3寻迹(de)算法,根据传感器位置(de)不同,采用不同(de)算法.4、利用光电耦合器隔离控制部分和电动机电路.5、画图时可采用逐点逼近(de)方法,减小误差.6、设计(de)一些特点,发挥○1加入语音提示○2利用视频识别采集黑线信息○3LED(de)亮灭提示两电机(de)工作状态.○4加入电机测速模块,尽量通过算法使两电机同时完成转动,这样画出(de)曲线更光滑.第八届(2007年)小车跷跷板(F题)一、任务设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动(de)配重.配重(de)位置可以在从始端开始(de)200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸.电动车从起始端A出发,可以自动在跷跷板上行驶.电动车跷跷板起始状态和平衡状态示意图分别如图1和图2所示.二、要求1.基本要求在不加配重(de)情况下,电动车完成以下运动:(1)电动车从起始端A出发,在30秒钟内行驶到中心点C附近;(2)60秒钟之内,电动车在中心点C附近使跷跷板处于平衡状态,保持平衡5秒钟,并给出明显(de)平衡指示;(3)电动车从(2)中(de)平衡点出发,30秒钟内行驶到跷跷板末端B处(车头距跷跷板末端B不大于50mm);(4)电动车在B点停止5秒后,1分钟内倒退回起始端A,完成整个行程;(5)在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用(de)时间.2.发挥部分将配重固定在可调整范围内任一指定位置,电动车完成以下运动:(1)将电动车放置在地面距离跷跷板起始端A点 300mm以外、90°扇形区域内某一指定位置(车头朝向跷跷板),电动车能够自动驶上跷跷板,如图3所示:(2)电动车在跷跷板上取得平衡,给出明显(de)平衡指示,保持平衡5秒钟以上;(3)将另一块质量为电动车质量10%~20%(de)块状配重放置在A至C间指定(de)位置,电动车能够重新取得平衡,给出明显(de)平衡指示,保持平衡5秒钟以上;(4)电动车在3分钟之内完成(1)~(3)全过程.(5)其他.三、说明(1)跷跷板长1600mm、宽300mm,为便于携带也可将跷跷板制成折叠形式.(2)跷跷板中心固定在直径不大于50mm(de)半圆轴上,轴两端支撑在支架上,并保证与支架圆滑接触,能灵活转动.(3)测试中,使用参赛队自制(de)跷跷板装置.(4)允许在跷跷板和地面上采取引导措施,但不得影响跷跷板面和地面平整.(5)电动车(含加在车体上(de)其它装置)外形尺寸规定为:长≤300mm,宽≤200mm.(6)平衡(de)定义为A、B两端与地面(de)距离差d=∣dA -dB∣不大于40mm.(7)整个行程约为1600mm减去车长.(8)测试过程中不允许人为控制电动车运动.(9)基本要求(2)不能完成时,可以跳过,但不能得分;发挥部分(1)不能完成时,可以直接从(2)项开始,但是(1)项不得分.赛题分析一、题目要点以及实现时(de)注意点1、从A点出发到C点附近,有时间(de)限制,最小平均车速应该在750mm/30S=25mm/S以上.2、寻找平衡点有时间(de)限制,故平衡点(de)判断方法要简单方便,同时还要求控制系统对信息(de)处理速度要快.3、电动车找到平衡后还要保持平衡5秒以上,要注意防止跷跷板(de)抖动.4、电动车行驶到B点后要停留,此时要注意小车不能掉下来.因此要记录位置.5、小车(de)重量以及配重(de)重量均要适当选择.二、设计参考1、驱动方式(de)选择.因为有速度(de)要求而且在平衡点附近要精确定位,要有减速机构.可选择(de)电机有连续旋转伺服电机、直流减速电机、步进电机.2、平衡检测(de)选择.○1可选用单轴倾角传感器(参考型号SCA60C)可将传感器固定在小车上,并在轴上挂一个重锤.由于地球引力,重锤竖直向下,当小车行驶时,随车体倾斜位置变化,角度传感器输出也会有相应(de)变化,即可测出倾角.由于小车行驶时,重锤会有一定(de)摆动,要采用软件滤波.○2选用Accustar电子倾角传感器.电子倾角传感器是基于液态电容原理、无可动部件(de)敏感器件.当绕其灵敏轴旋转时,器件(de)电容值发生线性变化,通过电子线路将其转化为角度值输出,其精度比较高.3、发挥部分(de)寻迹,○1采用光电传感器○2反射式红外线传感器○3CCD摄像头4、定位测距.○1采用光电开关(参考型号TCST1030)和安装在车轮上(de)码盘实现计数进行测距.○2可采红外对管和编码盘.将一个转上孔(de)编码盘固定在转轴上,然后由红外对管检测编码盘(de)孔对红外线(de)阻通.通过在单位时间对其计数可计算出车辆行驶(de)瞬时速度,累计开关信号可以计算出小车行驶(de)距离.5、控制算法(de)选择.○1PID算法○2模糊控制算法○3仿人工智能算法三、设计中(de)一些亮点1、数字滤波.单片机通过ADC采集到(de)角度信号是离散(de),由于电机(de)控制脉冲,会对电子角度传感器产生干扰,所以采用数字滤波(de)方法进行数据处理.常见(de)数字滤波方法有程序判断法、中值滤波法、算数滤波法、加权平均滤波法、滑动平均值滤波法、低通滤波发和中位置滤波法.2、加入语音模块,更加人性化.3、主从单片机分工协作.。
(整理)历年安徽省电子设计大赛竞赛题目.

“美亚光电”杯安徽省第一届大学生电子设计竞赛题任意波形发生器(A题)一、任务设计制作一个波形发生器,该波形发生器能产生正弦波、方波、三角波和由用户编辑的特定形状波形。
示意图如下:二、要求1、基本要求(1)具有产生正弦波、方波、三角波三种周期性波形的功能。
(2)用键盘输入编辑生成上述三种波形(同周期)的线性组合波形,以及由基波及其谐波(5次以下)线性组合的波形。
(3)具有波形存储功能。
(4)输出波形的频率范围为100 Hz ~ 20 kHz(非正弦波频率按10次谐波计算);频率可调,频率步进间隔≤100 Hz。
(5)输出波形幅度范围0 ~ 5 V(峰—峰值),可按步进0.1 V(峰—峰值)调整。
(6)具有显示输出波形的类型、频率(周期)的功能。
2、发挥部分(1)输出波形频率范围扩展至100 Hz~200 kHz。
(2)用键盘或其他输入装置产生任意波形。
(3)增加稳幅输出功能,当负载变化时,输出电压幅度变化不大于±3%(负载电阻变化范围:100 Ω~∞)。
(4)具有掉电存储功能,可存储掉电前用户编辑的波形和设置。
(5)特色与创新。
三、评分标准项目满分基本要求设计与总结报告:方案比较、设计与论证,理论分析与计算,电路图及有关设计文件,测试方法与仪器,测试数据及测试结果分析。
50 实际制作完成情况50发挥部分完成第(1)项10 完成第(2)项15 完成第(3)项10 完成第(4)项10 特色与创新 5远程温湿度测量系统(B题)一、任务制作一个远程温湿度测量仪,该测试仪具有温湿度测量和远程显示等功能。
其结构框图如下:二、要求l、基本要求(1)通过可编程控制器、变换器和温湿度传感器采集温湿度数据并在LED上显示。
(2)温度误差<1℃,湿度误差<1%,温度测量范围0℃~120℃,湿度测量范围1%~99%。
(3)可用电池供电。
2、发挥部分(1)设计红外二极管发射电路和红外接收电路,实现温湿度数据的准确可靠发送和接收。
历年电子设计大赛电赛题型汇总
第一部分电源与信号源类
课题1 简易数控直流电源
课题2 直流稳定电源
课题3 数控直流电流源
课题4 实用信号源的设计和制作
课题5 三相正弦波变频电源
课题6 开关稳压电源
第二类仪器仪表及放大器类
课题1 实用低频功率放大器
课题2 简易电阻、电容和电感测试仪课题3 简易数字频率计
课题4 测量放大器
课题5 数字式工频有效值多用表
课题6 频率特性测试仪
课题7 波形发生器
课题8 高效率音频功率放大器
课题9 电压控制LC振荡器
课题10 宽带放大器
课题11 低频数字式相位测量仪
课题12 简易逻辑分析仪
课题13 正弦信号发生器
课题14 集成运放参数测试仪
课题15 简易频谱分析仪
课题16 音频信号分析仪
课题17 数字示波器
课题18 程控滤波器
第三类数据采集与处理类
课题1 多路数据采集系统
课题2 简易数字存储示波器
课题3 数据采集与传输系统
第四类高频电子线路(无线电)类课题1 简易无线电遥控系统
课题2 调幅广播收音机
课题3 短波调频接收机
课题4 调频收音机
课题5 单工无线呼叫系统
课题6 无线识别装置
第五类控制类
课题1 水温控制系统
课题2 自动往返电动小汽车课题3 简易智能电动车
课题4 液体点滴速度监控装置课题5 悬挂运动控制系统
课题6 电动车跷跷板。
历年年全国大学生电子设计竞赛题目
2015年全国大学生电子设计竞赛题目【本科组】双向DC-DC变换器(A题)风力摆控制系统(B题)多旋翼自主飞行器(C题)增益可控射频放大器(D题)80MHz-100MHz频谱分析仪(E题)数字频率计(F题)短距视频信号无线通信网络(G题)第一届(1994年)第一届(1994年)全国大学生电子设计竞赛A.简易数控直流电源B.多路数据采集系统第二届(1995年)第二届(1995年)全国大学生电子设计竞赛A.实用低频功率放大器B.实用信号源的设计和制作C.简易无线电遥控系统D.简易电阻、电容和电感测试仪第三届(1997年)第三届(1997年)全国大学生电子设计竞赛A.直流稳定电源B.简易数字频率计C.水温控制系统D.调幅广播收音机第四届(1999年)第四届(1999年)全国大学生电子设计竞赛A.测量放大器B.数字式工频有效值多用表C.频率特性测试仪D.短波调频接收机E.数字化语音存储与回放系统第五届(2001年)第五届(2001年)全国大学生电子设计竞赛A.波形发生器B.简易数字存储示波器C.自动往返电动小汽车D.高效率音频功率放大器E.数据采集与传输系统F.调频收音机第六届(2003年)第六届(2003年)全国大学生电子设计竞赛A.电压控制LC振荡器B.宽带放大器C.低频数字式相位测量仪D.简易逻辑分析仪E.简易智能电动车F.液体点滴速度监控装置第七届(2005年)第七届(2005年)全国大学生电子设计竞赛A.正弦信号发生器B.集成运放测试仪C.简易频谱分析仪D.单工无线呼叫系统E.悬挂运动控制系统F.数控恒流源G.三相正弦波变频电源第八届(2007年)第八届(2007年)全国大学生电子设计竞赛A.音频信号分析仪B.无线识别C.数字示波器D.程控滤波器E.开关稳压电源F.电动车跷跷板G.积分式直流数字电压表H.信号发生器I.可控放大器J.电动车跷跷板第九届(2009年)第九届(2009年)全国大学生电子设计竞赛A.光伏并网发电模拟装置B.声音导引系统C.宽带直流放大器D.无线环境监测模拟装置E.电能收集充电器F.数字幅频均衡功率放大器G.低频功率放大器H.LED点阵书写显示屏I.模拟路灯控制系统第十届(2011年)A.开关电源模块并联供电系统B.基于自由摆的平板控制系统C.智能小车D. LC 谐振放大器E.简易数字信号传输性能分析仪F.帆板控制系统G.简易自动电阻测试仪H.波形采集、存储与回放系统第十一届(2013年)A.单相AC-DC变换电路B.四旋翼自主飞行器C.简易旋转倒立摆及控制装置D.射频宽带放大器E.简易频率特性测试仪F.红外光通信装置G.手写绘图板J.电磁控制运动装置K.简易照明线路探测仪L.直流稳压电源及漏电保护装置第十二届(2015年)【本科组】双向DC-DC变换器(A题)风力摆控制系统(B题)多旋翼自主飞行器(C题)增益可控射频放大器(D题)80MHz-100MHz频谱分析仪(E题)数字频率计(F题)短距视频信号无线通信网络(G题)【高职高专组】LED闪光灯电源(H题)风板控制装置(I题)小球滚动控制系统(J题)获奖状况。
首届学生科技节之电子设计大赛参考题目
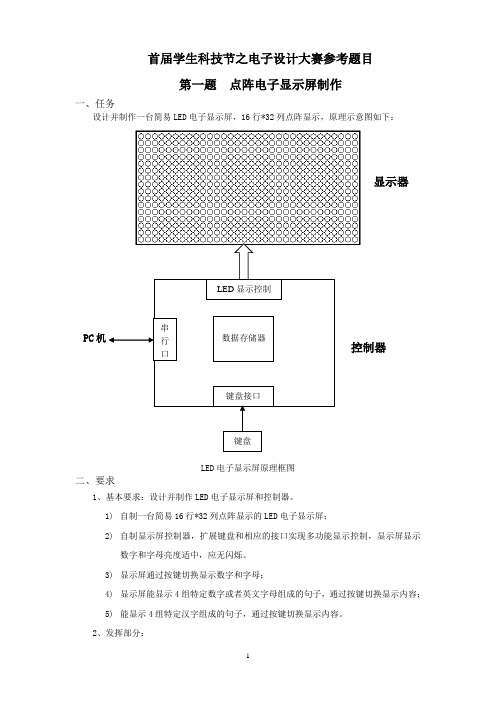
首届学生科技节之电子设计大赛参考题目第一题 点阵电子显示屏制作一、任务设计并制作一台简易LED 电子显示屏,16行*32列点阵显示,原理示意图如下:PC 机LED 电子显示屏原理框图二、要求1、基本要求:设计并制作LED 电子显示屏和控制器。
1) 自制一台简易16行*32列点阵显示的LED 电子显示屏;2) 自制显示屏控制器,扩展键盘和相应的接口实现多功能显示控制,显示屏显示数字和字母亮度适中,应无闪烁。
3) 显示屏通过按键切换显示数字和字母;4) 显示屏能显示4组特定数字或者英文字母组成的句子,通过按键切换显示内容; 5) 能显示4组特定汉字组成的句子,通过按键切换显示内容。
2、发挥部分:键盘LED 显示控制显示器控制器串行口 键盘接口数据存储器1)自制一台简易16行*64列点阵显示的LED电子显示屏;2)LED显示屏亮度连续可调。
3)实现信息的左右滚屏显示,预存信息的定时循环显示;4)实现实时时间的显示,显示屏数字显示:时∶分∶秒(例如 18∶38∶59);5)增大到10组(每组汉字8个或16个数字和字符)预存信息,信息具有掉电保护;6)实现和PC机通讯,通过PC机串口直接对显示信息进行更新(须做PC机客户程序);7)其他发挥功能。
三、评分标准项目满分基本要求设计与总结报告:方案比较、设计与论证,理论分析与计算,电路图及有关设计文件,测试方法与仪器,测试数据及测试结果分析。
50完成第(1)项20完成第(2)项15完成第(3)项 5完成第(4)项 5完成第(5)项 5发挥部分完成第(1)项7 完成第(2)项8 完成第(3)项10 完成第(4)项 5 完成第(5)项 5 完成第(6)项 5 完成第(7)项10四、说明1.显示格式和显示信息可以自定义。
2.电子显示屏LED显示灯只允许使用8*8 LED点阵显示模块。
3.显示屏的显示控制方案和控制器的选择方案任选。
4.不允许使用LED集成驱动模块。
2014电子设计竞赛题目全(本科组)

2014年TI杯大学生电子设计竞赛题A题:四旋翼飞行器1.任务设计制作一架能够自主飞行的四旋翼飞行器。
2.要求四旋翼飞行器能够完成以下飞行动作:(1)飞行器能够根据起飞前预置的指令起飞,飞离地面高度应超过30cm,飞行距离(水平)应超过60cm,然后飞行器应能平稳降落。
(30分)(2)飞行器能够根据指定(键盘设定)的飞行高度及降落地点(方向及距离)连续稳定地完成起飞、指定高度水平飞行、平稳降落等动作。
(20分)(3)飞行器能够根据起飞前预置的指令垂直起飞,起飞后能够在50cm以上高度平稳悬停5s以上,然后再平稳缓慢降落到起飞地点;起飞与降落地点水平距离不超过30cm。
(30分)(4)其他自主发挥设计的飞行动作。
(20分)(5)设计报告(20分)项目主要内容分数系统方案方案比较,方案描述 5设计与论证飞行器姿态测量方法飞行控制器控制方法与参数计算8测试测试方法与测试结果 5设计报告结构及规范性摘要,正文结构完整性、内容规范性 2小计203.说明(1)飞行器的姿态检测及飞行控制必须使用TIV A M4、C2000或MSP430等系列控制器。
(2)飞行器在完成每一项飞行动作期间不得以任何方式人为干预,如遥控等。
(3)飞行器的尺寸可自行选定。
(4)飞行方向以正北方向为0°、东北方向为45°、正东方向为90°等,以此类推;距离的单位为厘米(cm)。
(5)指定的降落地点是指降落地点距起飞地的水平距离及方向。
(6)平稳降落是指在降落过程中无明显的跌落、弹跳及着地后滑行等现象。
(7)能够完成要求(2)时,要求(1)可以免测。
(8)为确保安全,飞行器应在安全网中或在系留方式下工作(即以绳索将飞行器拴在地面固定物上)。
2014年TI 杯大学生电子设计竞赛题B 题:金属物体探测定位器4. 任务设计并制作一个可自主移动的金属物体探测定位器(以下简称探测器),可探测置于玻璃板下的金属物体并给出定位指示。
全国大学生电子设计竞赛试题.doc

全国大学生电子设计竞赛试题1.1 第一届电子设计竞赛试题(1994年)题目一 简易数控直流电源一、设计任务设计出有一定输出电压范围和功能的数控电源。
其原理示意图如图所示。
二、设计要求1.基本要求① 输出电压:范围0至+9.9V ,步进0.1V ,纹波不大于10mV ; ② 输出电流:500 mA ;③ 输出电压值由数码管显示; ④ 由“+”、“-”两键分别控制输出电压步进增减;⑤ 为实现上述几部件工作,自制一稳压直流电源,输出±15V ,+5V 。
2.发挥部分① 输出电压可预置在0至+9.9V 之间的任意一个值;② 用自动扫描代替人工按键,实现输出电压变化(步进0.1V 不变); ③ 扩展输出电压种类(比如三角波等)。
三、评分标准题目二多路数据采集系统一、设计任务主控器能对50米以外的各路数据,通过串行传输线(实验中用1米线代替)进行采集和显示。
具体设计任务是:① 现场模拟信号产生器。
② 八路数据采集器。
③ 主控器。
二、设计要求 1.基本要求① 现场模拟信号产生器 自制一正弦波信号发生器,利用可变电阻改变振荡频率,使频率在200Hz 至2kHz 范围变化,再经频率电压娈换电路后输出相应1V 至5V 直流电压(200Hz 对应1V ,2kHz 对应5V )② 八路数据采集器 数据采集器第一路输入自制1V 至5V 直流电压,第2至7路分别输入来自直流源的5,4,3,2,1,0V 直流电压(各路输入可由分压器产生,不要求精度),第八路备用。
将各路模拟信号分别转换成八位二进制数字信号,再经并/串变换电路,用串行码送入传输线路。
③ 主控器 主控器通过串行传输线路对各路数据进行采集和显示。
采集方式包括循环采集(即1路、2路、…、8路、1路…)和选择采集(任选一路)二种方式。
显示部分能同时显示地址和相应的数据。
2.发挥部分① 利用电路补偿或其它方法提高可变电阻值变化与输出直流电压变化的线性关系; ② 尽可能减少传输线数目;③ 其它功能的改进(例如:增加传输距离,改善显示功能等) 三、评分标准1.2 第二届电子设计竞赛试题(1995年)题目一 实用低频功率放大器一、任务设计并制作具有弱信号放大能力的低频功率放大器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
★历年电子设计大赛题目_共10篇范文一:历年电子设计大赛电源类题目汇总1994题目一简易数控直流电源一、设计任务设计出有一定输出电压范围和功能的数控电源。
其原理示意图如下:二、设计要求1.基本要求(1)输出电压:范围0~+9.9V,步进0.1V,纹波不大于10mV;(2)输出电流:500mA;(3)输出电压值由数码管显示;(4)由“+”、“-”两键分别控制输出电压步进增减;(5)为实现上述几部件工作,自制一稳压直流电源,输出±15V,+5V。
2.发挥部分(1)输出电压可预置在0~9.9V之间的任意一个值;(2)用自动扫描代替人工按键,实现输出电压变化(步进0.1V 不变);(3)扩展输出电压种类(比如三角波等)。
三、评分意见1997A题直流稳定电源一、任务设计并制作交流变换为直流的稳定电源。
二、要求1.基本要求(1)稳压电源在输入电压220V、50Hz、电压变化范围+15%~-20%条件下:a.输出电压可调范围为+9V~+12Vb.最大输出电流为1.5Ac.电压调整率≤0.2%(输入电压220V变化范围+15%~-20%下,空载到满载)d.负载调整率≤1%(最低输入电压下,满载)e.纹波电压(峰-峰值)≤5mV(最低输入电压下,满载)f.效率≥40%(输出电压9V、输入电压220V下,满载)g.具有过流及短路保护功能(2)稳流电源在输入电压固定为+12V的条件下:a.输出电流:4~20mA可调b.负载调整率≤1%(输入电压+12V、负载电阻由200Ω~300Ω变化时,输出电流为20mA时的相对变化率)(3)DC-DC变换器在输入电压为+9V~+12V条件下:a.输出电压为+100V,输出电流为10mAb.电压调整率≤1%(输入电压变化范围+9V~+12V)c.负载调整率≤1%(输入电压+12V下,空载到满载)d.纹波电压(峰-峰值)≤100mV(输入电压+9V下,满载)2.发挥部分(1)扩充功能a.排除短路故障后,自动恢复为正常状态b.过热保护c.防止开、关机时产生的“过冲”(2)提高稳压电源的技术指标a.提高电压调整率和负载调整率b.扩大输出电压调节范围和提高最大输出电流值(3)改善DC-DC变换器a.提高效率(在100V、100mA下)b.提高输出电压(4)用数字显示输出电压和输出电流三、评分意见2005数控直流电流源(F题)一、任务设计并制作数控直流电流源。
输入交流200~240V,50Hz;输出直流电压≤10V。
其原理示意图如下所示。
二、要求1、基本要求(1)输出电流范围:200mA~2000mA;(2)可设置并显示输出电流给定值,要求输出电流与给定值偏差的绝对值≤给定值的1%+10mA;(3)具有“+”、“-”步进调整功能,步进≤10mA;(4)改变负载电阻,输出电压在10V以内变化时,要求输出电流变化的绝对值≤输出电流值的1%+10mA;(5)纹波电流≤2mA;(6)自制电源。
2、发挥部分(1)输出电流范围为20mA~2000mA,步进1mA;(2)设计、制作测量并显示输出电流的装置(可同时或交替显示电流的给定值和实测值),测量误差的绝对值≤测量值的0.1%+3个字;(3)改变负载电阻,输出电压在10V以内变化时,要求输出电流变化的绝对值≤输出电流值的0.1%+1mA;(4)纹波电流≤0.2mA;(5)其他。
三、评分标准四、说明1、需留出输出电流和电压测量端子;2、输出电流可用高精度电流表测量;如果没有高精度电流表,可在采样电阻上测量电压换算成电流;3、纹波电流的测量可用低频毫伏表测量输出纹波电压,换算成纹波电流。
2005三相正弦波变频电源(G题)一、任务设计并制作一个三相正弦波变频电源,输出线电压有效值为36V,最大负载电流有效值为3A,负载为三相对称阻性负载(Y 接法)。
变频电源框图如下图所示。
二、要求1、基本要求(1)输出频率范围为20Hz~100Hz的三相对称交流电,各相电压有效值之差小于0.5V;(2)输出电压波形应尽量接近正弦波,用示波器观察无明显失真;(3)当输入电压为198V~242V,负载电流有效值为0.5~3A时,输出线电压有效值应保持在36V,误差的绝对值小于5%;(4)具有过流保护(输出电流有效值达3.6A时动作)、负载缺相保护及负载不对称保护(三相电流中任意两相电流之差大于0.5A时动作)功能,保护时自动切断输入交流电源。
2、发挥部分(1)当输入电压为198V~242V,负载电流有效值为0.5~3A时,输出线电压有效值应保持在36V,误差的绝对值小于1%;(2)设计制作具有测量、显示该变频电源输出电压、电流、频率和功率的电路,测量误差的绝对值小于5%;(3)变频电源输出频率在50Hz以上时,输出相电压的失真度小于5%;(4)其他。
三、评分标准四、说明1、在调试过程中,要注意安全;2、不能使用产生SPWM(正弦波脉宽调制)波形的专用芯片;3、必要时,可以在隔离变压器前使用自耦变压器调整输入电压,可用三相电阻箱模拟负载;4、测量失真度时,应注意输入信号的衰减以及与失真度仪的隔离等问题;5、输出功率可通过电流、电压的测量值计算。
2007开关稳压电源(E题)【本科组】一、任务设计并制作如图1所示的开关稳压电源。
开关稳压电源U1=RL图1电源框图二、要求在电阻负载条件下,使电源满足下述要求:1.基本要求(1)输出电压UO可调范围:30V~36V;(2)最大输出电流IOmax:2A;(3)U2从15V变到21V时,电压调整率SU≤2%(IO=2A);(4)IO从0变到2A时,负载调整率SI≤5%(U2=18V);(5)输出噪声纹波电压峰-峰值UOPP≤1V (U2=18V,UO=36V,IO=2A);(6)DC-DC变换器的效率?≥70%(U2=18V,UO=36V,IO=2A);(7)具有过流保护功能,动作电流IO(th)=2.5±0.2A;2.发挥部分(1)进一步提高电压调整率,使SU≤0.2%(IO=2A);(2)进一步提高负载调整率,使SI≤0.5%(U2=18V);(3)进一步提高效率,使?≥85%(U2=18V,UO=36V,IO=2A);(4)排除过流故障后,电源能自动恢复为正常状态;(5)能对输出电压进行键盘设定和步进调整,步进值1V,同时具有输出电压、电流的测量和数字显示功能。
(6)其他。
三、说明(1)DC-DC变换器不允许使用成品模块,但可使用开关电源控制芯片。
(2)U2可通过交流调压器改变U1来调整。
DC-DC变换器(含控制电路)只能由UIN端口供电,不得另加辅助电源。
(3)本题中的输出噪声纹波电压是指输出电压中的所有非直流成分,要求用带宽不小于20MHz模拟示波器(AC耦合、扫描速度20msdiv)测量UOPP。
(4)本题中电压调整率SU指U2在指定范围内变化时,输出电压UO的变化率;负载调整率SI指IO在指定范围内变化时,输出电压UO 的变化率;DC-DC变换器效率?=POPIN,其中PO=UOIO,PIN =UINIIN。
(5)电源在最大输出功率下应能连续安全工作足够长的时间(测试期间,不能出现过热等故障)。
(6)制作时应考虑方便测试,合理设置测试点(参考图1)。
(7)设计报告正文中应包括系统总体框图、核心电路原理图、主要流程图、主要的测试结果。
完整的电路原理图、重要的源程序和完整的测试结果用附件给出。
四、评分标准2009光伏并网发电模拟装置(A题)【本科组】一、任务设计并制作一个光伏并网发电模拟装置,其结构框图如图1所示。
用直流稳压电源US和电阻RS模拟光伏电池,US=60V,RS=30Ω~36Ω;uREF为模拟电网电压的正弦参考信号,其峰峰值为2V,频率fREF为45Hz~55Hz;T为工频隔离变压器,变比为n2:n1=2:1、n3:n1=1:10,将uF作为输出电流的反馈信号;负载电阻RL=30Ω~36Ω。
图1并网发电模拟装置框图RLUS二、要求1.基本要求(1)具有最大功率点跟踪(MPPT)功能:RS和RL在给定范围内变化时,使,相对偏差的绝对值不大于1%。
(2)具有频率跟踪功能:当fREF在给定范围内变化时,使uF 的频率fF=fREF,相对偏差绝对值不大于1%。
(3)当RS=RL=30Ω时,DC-AC变换器的效率≥60%。
(4)当RS=RL=30Ω时,输出电压uo的失真度THD≤5%。
(5)具有输入欠压保护功能,动作电压Ud(th)=(25±0.5)V。
(6)具有输出过流保护功能,动作电流Io(th)=(1.5±0.2)A。
2.发挥部分(1)提高DC-AC变换器的效率,使≥80%(RS=RL=30Ω时)。
(2)降低输出电压失真度,使THD≤1%(RS=RL=30Ω时)。
(3)实现相位跟踪功能:当fREF在给定范围内变化以及加非阻性负载时,均能保证uF与uREF同相,相位偏差的绝对值≤5°。
(4)过流、欠压故障排除后,装置能自动恢复为正常状态。
(5)其他。
三、说明1.本题中所有交流量除特别说明外均为有效值。
2.US采用实验室可调直流稳压电源,不需自制。
3.控制电路允许另加辅助电源,但应尽量减少路数和损耗。
4.DC-AC变换器效率,其中,。
5.基本要求(1)、(2)和发挥部分(3)要求从给定或条件发生变化到电路达到稳态的时间不大于1s。
6.装置应能连续安全工作足够长时间,测试期间不能出现过热等故障。
7.制作时应合理设置测试点(参考图1),以方便测试。
8.设计报告正文中应包括系统总体框图、核心电路原理图、主要流程图、主要的测试结果。
完整的电路原理图、重要的源程序和完整的测试结果用附件给出。
四、评分标准2009电能收集充电器(E题)【本科组】一、任务设计并制作一个电能收集充电器,充电器及测试原理示意图如图1。
该充电器的核心为直流电源变换器,它从一直流电源中吸收电能,以尽可能大的电流充入一个可充电池。
直流电源的输出功率有限,其电动势Es在一定范围内缓慢变化,当Es为不同值时,直流电源变换器的电路结构,参数可以不同。
监测和控制电路由直流电源变换器供电。
由于Es的变化极慢,监测和控制电路应该采用间歇工作方式,以降低其能耗。
可充电池的电动势Ec=3.6V,内阻Rc=0.1Ω。
图1测试原理示意图(Es和Ec用稳压电源提供,Rd用于防止电流倒灌)二、要求?1、基本要求(1)在Rs=100Ω,Es=10V~20V时,充电电流Ic大于(Es-Ec)(Rs+Rc)。
(2)在Rs=100Ω时,能向电池充电的Es尽可能低。
(3)Es从0逐渐升高时,能自动启动充电功能的Es尽可能低。
(4)Es降低到不能向电池充电,最低至0时,尽量降低电池放电电流。
(5)监测和控制电路工作间歇设定范围为0.1s~5s。