遥感图像的几何校正
遥感图像几何校正

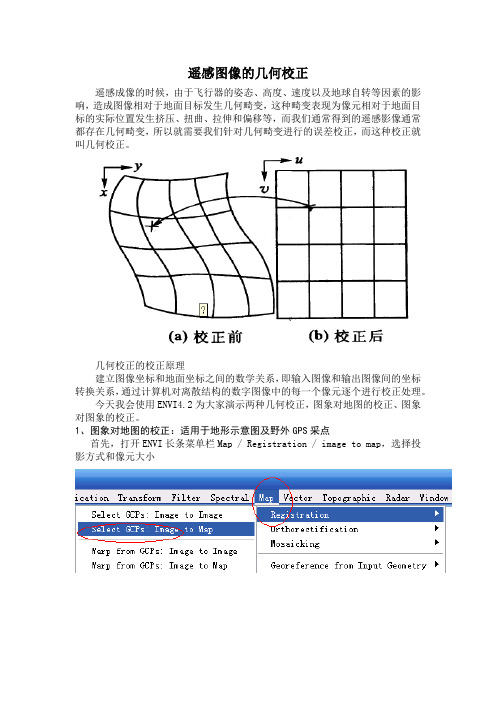
第4讲遥感图像几何校正遥感成像的时候,由于飞行器的姿态、高度、速度以及地球自转等因素的影响,造成图像相对于地面目标发生几何畸变,这种畸变表现为像元相对于地面目标的实际位置发生挤压、扭曲、拉伸和偏移等,针对几何畸变进行的误差校正就叫几何校正。
几何校正是利用地面控制点和几何校正数学模型来矫正非系统因素产生的误差,由于校正过程中会将坐标系统赋予图像数据,所以此过程包括了地理编码。
在开始介绍ENVI的几何校正操作之前,首先对ENVI的几何校正几个功能要点做一个说明。
1几何校正方法(1)利用卫星自带地理定位文件进行几何校正对于重返周期短、空间分辨率较低的卫星数据,如A VHRR、MODIS、SeaWiFS等,地面控制点的选择有相当的难度。
这时,可以利用卫星传感器自带的地理定位文件进行几何校正,校正精度主要受地理定位文件的影响。
(2) image to image几何校正通过从两幅图像上选择同名点(或控制点)来配准另外一幅栅格文件,使相同地物出现在校正后的图像相同位置(3)image to map几何校正通过地面控制点对遥感图像几何进行平面化的过程。
(4)image to image 自动图像配准根据像元灰度值或者地物特征自动寻找两幅图像上的同名点,根据同名点完成两幅图像的配置过程。
(5)image registration workflow流程化工具将具有不同坐标系、不同地理位置的图像配准到同一坐标系下,使图像中相同地理位置包含相同的地物。
2控制点选择方式ENVI提供以下选择方式:∙从栅格图像上选择如果拥有需要校正图像区域的经过校正的影像、地形图等栅格数据,可以从中选择控制点,对应的控制点选择模式为Image to Image。
∙从矢量数据中选择如果拥有需要校正图像区域的经过校正的矢量数据,可以从中选择控制点,对应的模式为Image to Map。
∙从文本文件中导入事先已经通过GPS测量、摄影测量或者其他途径获得了控制点坐标数据,保存为以[Map (x,y), Image (x,y)]格式提供的文本文件可以直接导入作为控制点,对应的控制点选择模式为Image to Image 和Image to Map。
如何进行遥感图像的几何校正与分类处理

如何进行遥感图像的几何校正与分类处理遥感图像是通过人造卫星、航空器或遥感器获取的地球表面的图像信息。
在进行遥感图像的处理和分析时,几何校正和分类处理是其中重要的步骤。
本文将重点探讨如何进行遥感图像的几何校正和分类处理,并介绍相关的方法和技术。
一、遥感图像的几何校正遥感图像的几何校正是指将图像中的像素点与地球表面上真实位置进行对应,以消除因成像过程中的非完美性而引入的误差。
几何校正的目的是提高图像的空间分辨率和地理位置精度,从而能够更准确地用于地表特征的分析和监测。
1. 预处理在进行几何校正之前,需要先对遥感图像进行预处理,包括去除大气影响、辐射校正和减噪等。
这些预处理步骤有助于提高图像的质量和准确性。
2. 控制点的选择几何校正过程中需要选择一些已知地理位置的控制点,用于图像与地理坐标系统的对应。
这些控制点可以是地面标志物、地理信息系统(GIS)数据或其他已知位置的遥感图像。
控制点的选择应均匀分布在图像中,并要尽量选择在不同地貌和地物类型上的点,以提高校正的准确性。
3. 变换模型的选择几何校正过程中需要选择适合图像特性和误差来源的变换模型。
常用的变换模型包括线性变换模型、多项式模型和地面控制点法等。
选择合适的变换模型可以提高校正的准确性和效率。
4. 校正方法和工具进行几何校正时,可以使用遥感软件如ENVI、ERDAS等提供的功能和工具。
这些软件提供了多种校正方法和算法,如影像配准、几何校正、快速校正等。
根据具体需求和图像特性选择合适的校正方法和工具,并进行参数设置和调整。
二、遥感图像的分类处理遥感图像的分类处理是指将图像中的像素按照其所代表的地物类型进行分类和划分。
分类处理的目的是将图像中的信息有效地提取出来,并用于地表特征的研究、资源调查和环境监测等。
1. 数据预处理在进行分类处理之前,需要对遥感图像进行数据预处理,包括辐射校正、几何校正、噪声抑制等。
这些预处理步骤可以提高分类的准确性和可靠性。
遥感图像的几何校正
分辨率:采用线对/毫米
f
Rg
Rs f H
Rg 为地面分辨率
H
H 为航高
Rs 为系统分辨率 f 为摄影机焦距
IKONOS 图像,1m分辨率
由于地形起伏 引起的平面上 的点位在相片 位置上的移动, 这种现象称为 像点位移,其 位移量就是中 心投影与垂直 投影在同一水 平面上的“投 影误差”
9个一定 高度的柱 子,影像 中心正射 投影,只 能看到顶; 其余成像 后放射状 的向外倒
物辐射状向外 称的向两侧倒,低
倒,低于基准 于基准面地物对称 面地物辐射状 的向中间倒 向内倒
高出基准面地物对
称的向两侧倒,低
于基准面地物对称 的向中间倒
传感器成像方式引起的图像变形 传感器外方位元素变化的影响 地形起伏引起的像点位移 地球曲率引起的图像变形 大气折射引起的图像变形 地球自转的影响
y f a12 ( X P X S ) a22 (YP YS ) a32 (ZP ZS ) a13 ( X P X S ) a23 (YP YS ) a33 (ZP ZS )
➢如辐射计、红外辐射计、微波辐射计、微波高 度计等
遥感 传感 器的 几何 投影 方式
中心投影类型:分幅式摄影机、面阵列 CCD传感器
掸扫式(逐点):光/机
扫描成像、镜头转动式 摄影机
多中心投影类型
推扫式(逐线) :固体 自扫描成像、狭缝式摄 影机
斜距投影成像仪: 侧视雷达等
不同类型成像传感器,其成像原理和投影方式也不同
➢ 中心投影构像方程 ➢ 多中心投影构像方程
➢推扫式传感器的构像方程 ➢扫描式传感器的构像方程
中心投影像片坐标与地面点大地坐标的关系:
X X
x
实验七 遥感图像几何精校正

图像几何校正遥感图像的几何纠正是指消除影像中的几何形变,产生一幅符合某种地图投影或图形表达要求的新影像。
一般常见的几何纠正有从影像到地图的纠正,以及从影像到影像的纠正,后者也称为影像的配准。
遥感影像中需要改正的几何形变主要来自相机系统误差、地形起伏、地球曲率以及大气折射等。
几何纠正包括两个核心环节:一是像素坐标的变换,即将影像坐标转变为地图或地面坐标;二是对坐标变换后的像素亮度值进行重采样。
一、影像到影像的几何纠正1、打开并显示图像文件在ENVI主菜单栏中,选择File →Open Image F ile,打开参考影像(这里以SPOT图像为例)和需校正影像(这里以TM图像为例)。
它们将分别显示在Display窗口,如图2.12所示。
图2.12 待纠正影像和参考影像显示图2、启动几何纠正模块(1)在ENVI主菜单中,选择Map→Registration→Select GCPs:Image to Image,弹出Image to Image Registration几何纠正模块对话框。
(2)选择显示参考影像(SPOT文件)的Display为基准图像的(Base Image),显示需校正影像(TM文件)的Display为待纠正图像(Warp Image)(如图2.13所示)。
(3)点击OK按钮,弹出Ground Control Point Selection对话框,进行地面控制点的采集,如图2.14所示。
图2.14 地面控制点选择对话框图2.13 选择基准影像与待纠正影像3、采集地面控制点在图像几何纠正过程中,采集地面控制点是一项重要和繁重的工作,直接影响最后的纠正结果,在实际操作中要特别认真和具有耐心。
(1)在Ground Control Point Selection对话框中,选择Options→ Set Point Colors,设置或修改GCP在可用和不可用状态的颜色。
(2)在两个Display中移动方框位置,寻找明显的地物特征点作为输入GCP。
遥感图像的几何校正原理
遥感图像的几何校正原理遥感图像的几何校正原理是指通过对遥感图像进行几何变换,将图像投影到地球表面上的正确位置,以确保图像的几何特征和空间位置的精确性。
遥感图像的几何校正原理是遥感技术中极为重要的一个环节,它涉及到传感器投影模型的建立以及图像的几何校正方法和参数计算等多个方面。
遥感图像的几何校正原理主要包括以下几个方面:1. 传感器的几何投影模型:遥感图像是通过传感器获取到的,而传感器的几何投影模型是校正的基础。
传感器的几何投影模型是描述传感器观测到的像元在地面坐标系中的位置的数学模型,通常包括摄影几何模型和几何投影模型。
摄影几何模型主要用于航片和卫星图像的几何定位,几何投影模型主要用于平面影像和正射影像的几何定位。
根据传感器的类型和几何特性,选择合适的几何投影模型进行校正。
2. 地面控制点的选择:地面控制点是指已知准确地理坐标的地物特征点,通过对图像与地面控制点的匹配,可以确定图像与地面坐标系之间的几何关系。
地面控制点的选择应具有代表性和充分的空间分布,以保证校正的几何精度。
常用的地面控制点包括地面标志物、地物边界等。
3. 图像配准和校正:图像配准是指将图像与地面控制点进行匹配,确定图像在地面坐标系中的位置。
图像校正是通过几何变换将图像投影到正确位置,保证图像的几何特征和空间位置的准确性。
常用的图像校正方法包括多项式变换、分段线性变换和二次变换等。
多项式变换是基于一阶、二阶或高阶多项式函数进行校正的方法,它可以实现图像的平移、旋转、缩放和错切等变换。
分段线性变换是将图像分成若干个区域,然后在每个区域内进行线性变换。
二次变换是将图像分成若干个二次曲面,然后在每个二次曲面内进行变换。
4. 校正参数的计算:校正参数是指用于实现图像校正的参数,一般包括平移、旋转、缩放和错切等参数。
校正参数的计算是校正过程中的关键一步,一般通过最小二乘法、迭代法和控制点测量法等方法来求解。
最小二乘法是一种常用的数学优化方法,通过最小化图像与控制点之间的误差,求解校正参数。
遥感图像的几何校正

Polynomial——多项式变换(同时做投影变换) ,设待纠正图像上飞像点 坐标(X,Y)和纠正后相应像点的坐标(x,y)可以用下 面的多项式来表示: x = a00+ a10 X + a01 Y + a20 X 2 + a11 XY + a02 Y 2 + ⋯ y = b00+ b10 X + b01 Y + b20 X 2 + b11 XY + b02 Y 2 + ⋯ 式中 aij,bij 为待求系数。多项式变换在卫星图像校正过程 中应用较多,在调用多项式模型时,需要确定多项式的次方数, 整景图像选择 3 次方。 次方数与所需要的最少控制点数是相关的,最少控制点计算公 式为( t + 1 × t + 2 ) 2,式中 t 为次方数,即 1 次方最少需 要 3 个控制点,2 次方最少需要 6 个控制点,3 次方需要 10 个控 制点。 Rubber Sheeting——非线性、非均匀变换。 采点模式: ① 视窗采点模式,直接在视窗中采点; ② 文件采点模式,直接读入控制点文件或 ASCLL 码文件; ③ 地图采点模式,通过数字化仪采点或通过键盘输入控制点。 重采样方法: ① Nearest Neighbor——邻近点插值法, 将最邻近像元值直接赋予输出像 元。特点:运算量最小,但是内插精度较低。 ② Bilinear Interpolation——双线性插值法, 用双线性方程和 2×2 窗口输 出像元值。特点:内插精度和运算量都比较适中; ③ Cubic Convolution——立方卷积插值法,用三次方程和 4×4 窗口计算 输出像元值。特点:内差精度高,缺点是运算量很大;
④ Bicubic Spline Interpolation——双三次样条插值, 产生比双线性插值更 平滑的图像边缘。 三、几何校正的方法
遥感图像的几何校正
遥感图像的几何校正遥感成像的时候,由于飞行器的姿态、高度、速度以及地球自转等因素的影响,造成图像相对于地面目标发生几何畸变,这种畸变表现为像元相对于地面目标的实际位置发生挤压、扭曲、拉伸和偏移等,而我们通常得到的遥感影像通常都存在几何畸变,所以就需要我们针对几何畸变进行的误差校正,而这种校正就叫几何校正。
几何校正的校正原理建立图像坐标和地面坐标之间的数学关系,即输入图像和输出图像间的坐标转换关系,通过计算机对离散结构的数字图像中的每一个像元逐个进行校正处理。
今天我会使用ENVI4.2为大家演示两种几何校正,图象对地图的校正、图象对图象的校正。
1、图象对地图的校正:适用于地形示意图及野外GPS采点首先,打开ENVI长条菜单栏Map / Registration / image to map,选择投影方式和像元大小注:选点须准确,最好在四倍放大时参照周围地物尽量准确定位,然后将其放大至20倍甚至更多倍数,进一步确定。
步骤4:加完足够多的点后,达到要求精度,Option / Warp file(控制点较均匀分布于全图,18个点以上,RMS Error一般应达到一个像元以内的精度)步骤5:输入待校正的图象,可以选择子集,点击OK,输出保存即可保存控制点文件:控制点对话框File—Save GCPs to ASCII,见下图。
如需再次使用该点文件,则通过前面所说步骤,打开控制点对话框,点击Restore GCPs from ASCII即可。
2、图象对图象的校正:步骤1:同时展示两幅图象,选择主菜单栏Map / Registration / image to image,选择Base image和Warp image图象所在在窗口,Base image:有地理座标的图像。
Warp image:待校正图像步骤2:设置点的颜色步骤3:在base image中选择控制点,在warp image中选择同一控制点,精确定位,Add point步骤4:加完足够多的点后,达到要求精度,Option / Warp file其余步骤同前图象对地图的校正。
实验四:遥感图像的几何校正

之后,点击Apply确认设置,再点击Close按钮进行下一步操作。
选择Existing Viewer,即以现有视图中的图像投影为配准依据。
确定后,打开校正对话框布局。
采集地面控制点( 采集地面控制点(Ground Control Point) ) GCP的具体采集过程: 的具体采集过程: 的具体采集过程 在图像几何校正过程中,采集控制点是一项非常重要和繁重的工作, 在图像几何校正过程中,采集控制点是一项非常重要和繁重的工作,具体过程如 下: 1、 在GCP工具对话框中,点击 工具对话框中, 图表, 选择状态; 、 工具对话框中 点击Select GCP图表,进入 图表 进入GCP选择状态; 选择状态 2、 在GCP数据表中,将输入 数据表中, 的颜色设置为比较明显的黄色。 、 数据表中 将输入GCP的颜色设置为比较明显的黄色。 的颜色设置为比较明显的黄色 3、 在Viewer1中移动关联方框位置,寻找明显的地物特征点,作为输入 中移动关联方框位置, 、 中移动关联方框位置 寻找明显的地物特征点,作为输入GCP。 。 4、 在GCP工具对话框中,点击 工具对话框中, 图标, 中点击左键定点, 、 工具对话框中 点击Create GCP图标,并在 图标 并在Viewer3中点击左键定点, 中点击左键定点 GCP数据表将记录一个输入 数据表将记录一个输入GCP,包括其编号、标识码、X坐标和 坐标。 坐标和Y坐标 数据表将记录一个输入 ,包括其编号、标识码、 坐标和 坐标。 5、 在GCP对话框中,点击 对话框中, 图标, 选择状态。 、 对话框中 点击Select GCP图标,重新进入 图标 重新进入GCP选择状态。 选择状态 6、 在GCP数据表中,将参考 数据表中, 的颜色设置为比较明显的红色, 、 数据表中 将参考GCP的颜色设置为比较明显的红色, 的颜色设置为比较明显的红色 7、 在Viewer2中,移动关联方框位置,寻找对应的地物特征点,作为参考 、 中 移动关联方框位置,寻找对应的地物特征点,作为参考GCP。 。 8、 在GCP工具对话框中,点击 工具对话框中, 图标, 中点击左肩顶巅, 、 工具对话框中 点击Create GCP图标,并在 图标 并在Viewer4中点击左肩顶巅, 中点击左肩顶巅 系统将自动将参考点的坐标( 、 )显示在GCP数据表中。 数据表中。 系统将自动将参考点的坐标(X、Y)显示在 数据表中 9、在GCP对话框中,点击 对话框中, 图标, 选择状态, 、 对话框中 点击SelectGCP图标,重新进入 图标 重新进入GCP选择状态,并将光标 选择状态 移回到Viewer1中,准备采集另一个输入控制点。 移回到 中 准备采集另一个输入控制点。 10、不断重复 ,采集若干控制点 、不断重复1-9,采集若干控制点GCP,直到满足所选定的几何模型为止,在 ,直到满足所选定的几何模型为止, 控制点达到一定数量后,每采集一个InputGCP,系统就自动产生一个 控制点达到一定数量后,每采集一个 ,系统就自动产生一个Ref. GCP, , 通过移动Ref. GCP可以优化校正模型。 可以优化校正模型。 通过移动 可以优化校正模型
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验03
遥感图像的几何校正
1、2实验数据“7-48-92-А(者相).jpg”、“7-48-80-丙(花江).jpg”。
3、实验数据用有投影的“panAtlanta.img”影像校正“tmAtlanta.img”影像。
2、方里网地形图几何校正
步骤与经纬度地形图校正相同,唯一的区别在与初始投影的选取和坐标值的输入。
(1)初始坐标值设置如下:
使用的是高斯-克吕格投影,6°分带第18带。
(2)输入坐标时,X轴不需要输入带号“18”,因为方里网的长度单位是km,因此在输入时要转换为m,即X轴18551输入时坐标为551000;Y轴2839输入时坐标为2839000。
小技巧:如果选取控制点过程中显示的十字星看不见,可以将其颜色设置为红色。
3、用有投影坐标的影像校正没有坐标的影像
第6步图像重采样同地形图几何校正
五、将几何校正后的影像转换为常用投影(1)启动几何校正模块,选择“重投影”(Reproject)
(2)选择重新投影的投影参数(贵州地区)
(3)重采样,保存。
实验数据说明:
1、实验数据“7-48-92-А(者相).jpg”、“7-48-80-丙(花江).jpg”。
2、实验数据“7-48-92-А(者相).jpg”。
3、实验数据用有投影的“panAtlanta.img”影像校正“tmAtlanta.img”影像。
实验结果:
1、
huajiang.img:几何校正结果(经纬度坐标)
huajiang-r.img:重投影结果(阿尔伯斯投影坐标)
zhexiang.img:几何校正结果(经纬度坐标)
zhexiang-r.img:重投影结果(阿尔伯斯投影坐标)
2、
zhexiang-gk.img:几何校正结果(方里网坐标)
zhexiang-gk-r.img:重投影结果(阿尔伯斯投影坐标)
3、
atlanta.img:几何校正结果(坐标系统与参考影像panAtlanta.img相同)。