相控阵雷达导引头动力学特性对隔离度的影响
相控阵雷达导引头动力学特性对隔离度的影响
相控阵雷达导引头动力学特性对隔离度的影响制导系统的核心任务之一是获取基于惯性空间下的制导信息,但是弹体扰动若耦合进入制导信息中,将造成对目标的测量误差,因此导引头在工作中需要隔离弹体的运动。
以往隔离度的研究不考虑相控阵导引头各环节的动力学特性,而相控阵雷达导引头波控系统动力学与角速率陀螺动力学的不一致也是造成全捷联相控阵导引头隔离度的重要原因,故而文章在考虑了相控阵雷达导引头动力学的基础上,分析各环节性能对隔离度的影响,并通过仿真加以验证。
标签:全捷联;相控阵雷达导引头;隔离度;动力学特性1 概述全捷联导引头的不完全解耦是产生隔离度问题的根本原因[1]。
国内外对导引头不完全解耦的分析只停留在导引头测角系统与角速率陀螺刻度尺误差方面,并没有深入考虑测角系统与角速率陀螺动力学特性对隔离度的影响。
文章就以全捷联相控阵雷达导引头为研究对象,针对导引头测角系统与角速率陀螺的动力学特性对导引头隔离度的影响进行分析。
在图1的角度关系中,理想情况下,?着=0,也就是波束轴完全跟踪目标,即得到?兹B=?兹。
当弹体存在角运动时,由导引头量测信息得到波束轴相对弹体轴的角速度,理论上将此与角速率陀螺测量得到的相加就可实现弹体角运动的解耦,从而得到基于惯性空间的弹目视线角速度为[2]:其中,因为导引头测得的视线角速度信息是波束轴相对于弹体轴的角速,此时可以认为弹体的姿态摆动已经完全耦合到探测器输出中,包含于探测器输出?兹的微分中,只有角速率陀螺测量的弹体摆动角速度与探测器输出微分中的弹体摆动角速度分量完全一样时,才能实现对弹体扰动的完全解耦。
当两者测量的弹体摆动角速度不一致时,就产生了视线角速度的偏差[3]~[7]。
2 相控阵雷达导引头各环节动力学特性的2.1 测角系统动力学考虑相控阵雷达导引头测角系统波束宽度、测角周期、计算延时、失调角量化特性、测量噪声及零位等因素建立相控阵雷达导引头测角系统的功能模型[8]~[12],如图2所示。
相控阵雷达在导引头中的应用现状与探讨

相控阵雷达在导引头中的应用现状与探讨相控阵雷达(Phased Array Radar,PAR)是一种通过电子扫描而不是机械扫描来实现雷达波束的定向的雷达系统。
它由许多单元阵列构成,每个单元阵列都能够独立调整相位和振幅,从而实现对雷达波束的控制。
相控阵雷达具有快速波束转向、多功能、增强隐身检测等特点,因此在导引头领域有着广泛的应用。
在导引头中,相控阵雷达可以用于目标检测、跟踪和导引。
首先,相控阵雷达可以提供高分辨率的目标探测能力,通过电子扫描可以快速扫描整个天空,并能够提供快速更新的目标信息。
其次,相控阵雷达能够实现多目标跟踪,通过多个单元阵列的合作,可以同时跟踪多个目标,并实时更新其轨迹和速度信息。
最后,相控阵雷达可以用于导引,通过对导弹进行导引,使其能够准确地击中目标。
相控阵雷达在导引头领域的应用已经取得了显著成果。
首先,相控阵雷达在导弹的制导中能够实现更高的精度和准确性。
由于相控阵雷达能够实现快速波束转向和多目标跟踪,导弹可以根据导引头的指令实时调整飞行路径,快速锁定目标并进行精确定位,从而提高导弹的命中率。
其次,相控阵雷达还可以提供更好的隐身检测能力。
相比传统机械扫描雷达,相控阵雷达具有更快的扫描速度和更高的空间分辨率,可以更早地发现隐身目标,并提供更准确的目标特征信息。
然而,相控阵雷达在导引头应用中也面临一些挑战。
首先,相控阵雷达的实现需要大量的单元阵列和复杂的信号处理算法,这增加了系统的复杂性和成本。
其次,相控阵雷达的功耗也较高,这对于导弹等小型平台来说是一个挑战。
此外,相控阵雷达在电子对抗环境下的抗干扰能力也需要进一步改进。
为了克服这些挑战,目前有一些研究正在进行。
首先,在相控阵雷达的硬件实现方面,研究人员正在探索新型材料和组件,以提高系统的性能和降低成本。
其次,在信号处理算法方面,研究人员正着重研究更高效的算法,以提高系统的性能和减小功耗。
此外,还有一些研究致力于提高相控阵雷达的抗干扰能力,通过采用新的信号处理方法和抗干扰技术来提高系统的抗干扰性能。
一种相控阵导引头跟踪解耦技术的实验验证
一种相控阵导引头跟踪解耦技术的实验验证
邱海宾;冉财章;赵和鹏
【期刊名称】《电子信息对抗技术》
【年(卷),期】2018(033)006
【摘要】相控阵雷达导引头是导引头发展的一个新趋势,但由于其天线与弹体固连,隔离弹体姿态扰动对导引头波束稳定跟踪的影响是相控阵雷达导引头急需解决的关键技术之一.在现有理论研究基础上,利用相控阵导引头敏感波束中心与目标视线的失调角作为控制量,并利用速率陀螺测得的弹体角速度信息进行补偿,实现波束指向对弹体扰动的去耦合.最后,利用某导引头实测数据,验证了此算法在工程中的有效性,通过测试比对,该弹体捷联解耦算法能够较好地隔离弹体姿态运动对捷联导引头的影响,去耦能力满足导引头在实际应用中对运动目标的稳定跟踪要求.
【总页数】6页(P28-32,47)
【作者】邱海宾;冉财章;赵和鹏
【作者单位】电子信息控制重点实验室,成都610036;电子信息控制重点实验室,成都610036;海军装备部信息系统局,北京100841
【正文语种】中文
【中图分类】TN971.1
【相关文献】
1.基于机动目标跟踪的相控阵雷达导引头一体化制导技术研究 [J], 朱学平;孟江浩;许涛;杨军
2.相控阵雷达导引头捷联解耦技术研究 [J], 杨建锋
3.激光导引头的一种新跟踪控制技术研究 [J], 康宁;王绪安;龙鹏翼;蔡睿洁
4.一种基于记忆的目标跟踪算法及实验验证 [J], 齐玉娟;牛潇然;王延江
5.基于角位置补偿的相控阵导引头解耦及跟踪技术 [J], 朱振虹;刘银中
因版权原因,仅展示原文概要,查看原文内容请购买。
平台导引头隔离度特性研究
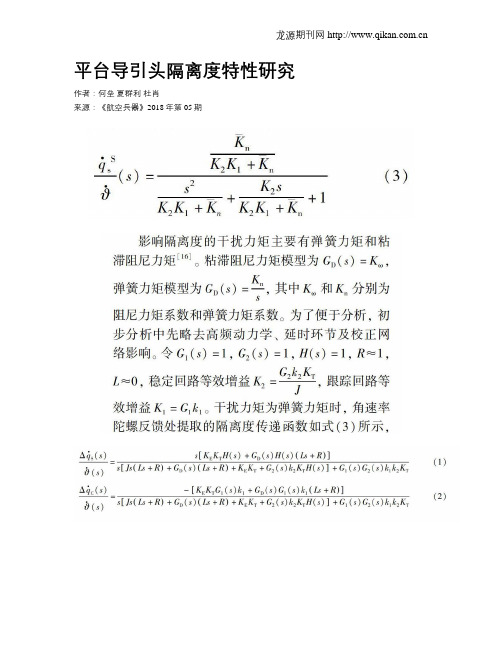
平台导引头隔离度特性研究作者:何垒夏群利杜肖来源:《航空兵器》2018年第05期摘要:为了研究平台导引头在不同视线角速度提取方式下的隔离度特性,建立了基于惯性基准的典型平台导引头隔离度模型和隔离度寄生回路模型,分析了噪声对不同视线角速度提取的影响,推导出了干扰力矩下不同提取方式的隔离度傳递函数,利用无量纲化方法和劳斯判据分析了隔离度寄生回路稳定性。
研究表明:不同视线角速度提取点对不同噪声敏感度不同,制导系统参数、干扰力矩类型和视线角速度提取方式均会对隔离度寄生回路稳定性造成影响,在导引头不同主要干扰因素下选择合理的视线角速度提取方式有助于提高制导系统性能。
关键词:平台导引头; 阻尼力矩; 弹簧力矩; 隔离度; 视线角速度提取; 稳定性中图分类号:TJ765.3 文献标识码:A 文章编号: 1673-5048(2018)05-0041-06[SQ0]0 引言导引头是导弹系统关键部件之一[1],平台导引头的主要功能是完成对目标的搜索、识别和跟踪,为了保证导引头的测量和跟踪精度,要求稳定平台对弹体的扰动具有很好的隔离作用[2]。
隔离度是导引头的重要性能指标,表征了导引头隔离弹体扰动的能力,直接关系到导弹的制导精度[3]。
常用的平台导引头隔离度模型有基于惯性基准和基于弹体基准两种[4],其主要区别为平台转动角速度是相对于惯性空间还是相对于弹体。
目前,国内外许多学者[5-9]采用基于弹体基准的隔离度模型进行分析。
吴晔[10]和崔莹莹等[11]对基于惯性基准和基于弹体基准的隔离度完成了建模和分析,发现在低频时两种模型差距较小,随着频率的增加两种模型特性差异较大。
王志伟[12]、张盈华[13]和李富贵[14]等学者对非线性的干扰力矩进行分析和简化建模,并基于简化模型对隔离度特性进行分析。
但上述研究只是将隔离度简化为一个常数,并没有体现隔离度传递函数的特性。
目前的工艺水平可以保证导引头稳定回路具有较高的增益,从而使得稳定回路指令和角速率陀螺输出的信号动态响应基本一致,认为两处提取的弹目视线角速度差别不大。
机载相控阵火控雷达的技术特征及干扰研究分析论文
机载相控阵火控雷达的技术特征及干扰研究分析论文机载相控阵火控雷达的技术特征及干扰研究分析论文机载火控雷达的主要作用是测定目标的空间位置,提供给火控系统,通过制导武器对目标实施攻击。
相控阵机载火控雷达是采用相控阵天线的机载火控雷达。
它是一种电子扫描雷达,由计算机控制,用电子的方法实现天线波束指向在空间的转动或扫描的电扫雷达系统,克服了机械扫描雷达惯性延迟的不足,波束灵活,能迅速而精确地控制和变换波束形状、数目和扫描图形,使得机载相控阵火控雷达实现了同时多目标跟踪和攻击、同时多功能和低截获概率能力,并降低了的自身的雷达截面积,可提高飞机的作战能力和战场生存能力。
1 相控阵天线原理相控阵天线有多种形式,如线阵、平面阵、圆阵、圆柱形阵列、球形阵和共形阵等,但都是从阵列天线发展起来的。
阵列天线通常由多个偶极子天线单元组成,偶极子天线具有近似的无方向性天线方向图,天线增益很低,在自由空间内增益只有6dB 左右,为了获得较高的增益,将多个偶极子天线单元按一定的规则排列在一起,形成一个大的阵列天线。
N 个带有移相器的相同单元的线性阵列天线,相邻单元间隔为d。
与直线阵相垂直的方向为天线阵的法线方向,称为“基本轴”。
设各单元移相器输入端均为等幅同相馈电,且馈电相位为零。
各个移相器能够对馈入信号产生0~2π 的相移量,按单元序号的增加其相移量依次为Ф1、Ф2、Ф3、…、ФN-1、ФN。
(1)当目标处于天线阵法线方向时,要求天线波束指向目标,即波束峰值对准目标。
由阵列天线的原理可知,只要各单元辐射同相位的电磁波,则波束指向天线阵的法线方向。
根据阵列天线这一结论,若对相控阵天线中各个移相器输人端同相馈电,那么,各个移相器必须对馈人射频信号相移相同数值(或均不移相),才能保证各单元同相辐射电磁波,从而使天线波束指向天线阵的法线方向。
换句话说,各个移相器的相移量,应当使相邻单元间的相位差均为零,天线波束峰值才能对准天线阵的法线方向。
相控阵雷达导引头调度策略研究
文献 [ ] 细 讨 论 了相 控 阵雷 达 工 作 方 式 的 2详 调度 策 略 , 出 了影响 调度 策略 的 主要 因素 , 对 给 并 常用 调 度算 法进 行 了分 析 。 文献 [ , ] 仿 真 多 34在 功 能雷 达 自适应 调度算 法 时提 出 了雷达 事件 时 间 窗的设 计概 念 , 得雷 达 事 件 可 在 其 期 望 执行 时 使 间附近 执行 , 献 [ ] 出 了时 间 窗 的设 计 方 法 。 文 5给
搜 索 方式更 加 灵活 、 目标 截获 与跟 踪能 力更 强 , 能
0 引 言
相控阵雷达导引头总体技术研究
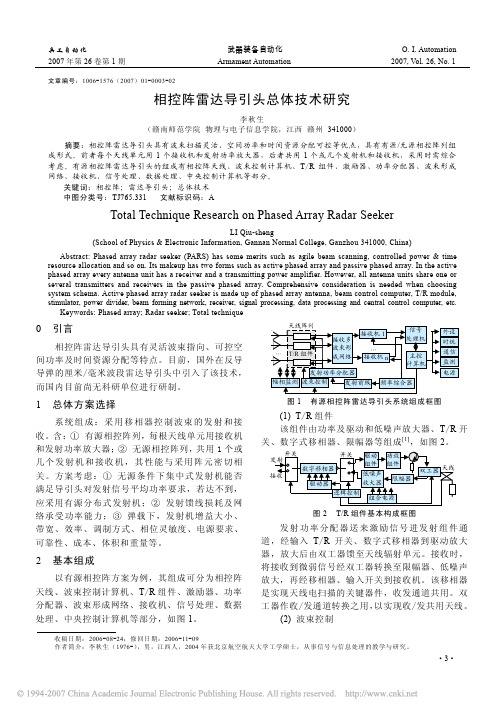
文章编号:1006-1576(2007)01-0003-02相控阵雷达导引头总体技术研究李秋生(赣南师范学院物理与电子信息学院,江西赣州 341000)摘要:相控阵雷达导引头具有波束扫描灵活、空间功率和时间资源分配可控等优点,具有有源/无源相控阵列组成形式。
前者每个天线单元用1个接收机和发射功率放大器,后者共用1个或几个发射机和接收机,采用时需综合考虑。
有源相控阵雷达导引头的组成有相控阵天线、波束控制计算机、T/R组件、激励器、功率分配器、波束形成网络、接收机、信号处理、数据处理、中央控制计算机等部分。
关键词:相控阵;雷达导引头;总体技术中图分类号:TJ765.331 文献标识码:ATotal Technique Research on Phased Array Radar SeekerLI Qiu-sheng(School of Physics & Electronic Information, Gannan Normal College, Ganzhou 341000, China) Abstract: Phased array radar seeker (PARS) has some merits such as agile beam scanning, controlled power & time resource allocation and so on. Its makeup has two forms such as active phased array and passive phased array. In the active phased array every antenna unit has a receiver and a transmitting power amplifier. However, all antenna units share one or several transmitters and receivers in the passive phased array. Comprehensive consideration is needed when choosing system schema. Active phased array radar seeker is made up of phased array antenna, beam control computer, T/R module, stimulator, power divider, beam forming network, receiver, signal processing, data processing and central control computer, etc.Keywords: Phased array; Radar seeker; Total technique0 引言相控阵雷达导引头具有灵活波束指向、可控空间功率及时间资源分配等特点。
多通道相控阵雷达导引头技术概述
多通道相控阵雷达导引头技术概述
郑巧珍;黄飞;王佳;宋柯
【期刊名称】《航空兵器》
【年(卷),期】2016(000)006
【摘要】多通道相控阵雷达导引头以其优越的性能成为当前精确制导雷达导引头研究热点.本文介绍了多通道相控阵雷达导引头的系统构成及关键技术,重点讨论了自适应数字波束形成和角度高分辨等抗干扰技术,总结并展望了多通道相控阵雷达导引头技术的发展方向.多通道相控阵雷达导引头运用阵列信号处理技术,拓宽了导引头抗干扰手段,可有效提升导引头在复杂电磁环境下的作战能力.
【总页数】4页(P40-43)
【作者】郑巧珍;黄飞;王佳;宋柯
【作者单位】上海无线电设备研究所,上海 200090;上海无线电设备研究所,上海200090;上海无线电设备研究所,上海 200090;上海无线电设备研究所,上海200090
【正文语种】中文
【中图分类】TN958.92
【相关文献】
1.相控阵雷达导引头捷联解耦技术研究 [J], 杨建锋
2.国外相控阵雷达导引头技术发展研究 [J], 赵鸿燕
3.基于极化波束形成的相控阵雷达导引头抗干扰技术研究 [J], 陈志坤;乔晓林;李风
从
4.相控阵雷达导引头技术现状及发展趋势 [J], 陈潜;陆满君;宋柯;于祥祯;杜科
5.相控阵雷达导引头技术现状及发展趋势 [J], 陈潜;陆满君;宋柯;于祥祯;杜科因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
相控阵雷达导引头动力学特性对隔离度的影响
制导系统的核心任务之一是获取基于惯性空间下的制导信息,但是弹体扰动若耦合进入制导信息中,将造成对目标的测量误差,因此导引头在工作中需要隔离弹体的运动。
以往隔离度的研究不考虑相控阵导引头各环节的动力学特性,而相控阵雷达导引头波控系统动力学与角速率陀螺动力学的不一致也是造成全捷联相控阵导引头隔离度的重要原因,故而文章在考虑了相控阵雷达导引头动力学的基础上,分析各环节性能对隔离度的影响,并通过仿真加以验证。
标签:全捷联;相控阵雷达导引头;隔离度;动力学特性
1 概述
全捷联导引头的不完全解耦是产生隔离度问题的根本原因[1]。
国内外对导引头不完全解耦的分析只停留在导引头测角系统与角速率陀螺刻度尺误差方面,并没有深入考虑测角系统与角速率陀螺动力学特性对隔离度的影响。
文章就以全捷联相控阵雷达导引头为研究对象,针对导引头测角系统与角速率陀螺的动力学特性对导引头隔离度的影响进行分析。
在图1的角度关系中,理想情况下,?着=0,也就是波束轴完全跟踪目标,即得到?兹B=?兹。
当弹体存在角运动时,由导引头量测信息得到波束轴相对弹体轴的角速度,理论上将此与角速率陀螺测量得到的相加就可实现弹体角运动的解耦,从而得到基于惯性空间的弹目视线角速度为[2]:
其中,因为导引头测得的视线角速度信息是波束轴相对于弹体轴的角速,此时可以认为弹体的姿态摆动已经完全耦合到探测器输出中,包含于探测器输出?兹的微分中,只有角速率陀螺测量的弹体摆动角速度与探测器输出微分中的弹体摆动角速度分量完全一样时,才能实现对弹体扰动的完全解耦。
当两者测量的弹体摆动角速度不一致时,就产生了视线角速度的偏差[3]~[7]。
2 相控阵雷达导引头各环节动力学特性的
2.1 测角系统动力学
考虑相控阵雷达导引头测角系统波束宽度、测角周期、计算延时、失调角量化特性、测量噪声及零位等因素建立相控阵雷达导引头测角系统的功能模型[8]~[12],如图2所示。
图2中,?着为失调角真值;?着max为半波束宽度;T为失调角测量周期;?子为失调角计算延时;K为失调角测量刻度因子;?驻?着为导引头失调角测量量化单位;?着0为失调角测量系统误差;?着n为失调角测量随机噪声。
2.2 波束控制器动力学
考虑相控阵雷达导引头波束控制系统延迟特性、控制周期、波束控制跃度、控制误差、波束指向范围限制等因素建立相控阵雷达导引头波束控制系统的数学模型,如图3所示。
图3中,?子b为波束控制系统延迟特性,其取值为微秒级,在设计过程中予以忽略;Tb为波束控制周期;?兹为波束控制随机误差;?兹max为波束控制指向范围限幅。
2.3 速率陀螺动力学
考虑速率陀螺动态特性、延迟时间、数据率及量程限制建立其数学模型,如图4所示。
图4中,T为速率陀螺时间常数;?孜为速率陀螺阻尼系数;?子g为速率陀螺传输延迟时间;Tg为速率陀螺数据周期;?棕为弹体姿态角速度;?棕m 为弹体姿态角速度测量值;?棕max为速率陀螺量程限制。
速率陀螺动态特性可用二阶欠阻尼环节描述。
3 相控阵雷达导引头隔离度分析
3.1 隔离度定义
隔离度是评价导引头系统解耦弹体运动的一个重要指标,定义为弹体扰动引起的导引头测量的附加视线角速度■与弹体姿态角速度的比值,通常用R表示。
即,
(2)
3.2 波束稳定与跟踪回路隔离度分析
将分别表示测角机构,波控算法,角速率陀螺的动力学特性,上述结构可以简化成如下的形式:
此时的雷达导引头已经通过将姿态角前馈,解决了提取的视线角对姿态角的耦合问题。
从弹目视线角速度qt到全捷联相控阵导引头输出的传递函数为:
(3)
从弹目视线角速度t到全捷联相控阵导引头输出的传递函数为:
(4)
由弹体姿态角速度到全捷联相控阵导引头输出的传递函数为:
(5)
其中GB(s)是波控系统的动力学表达式,Gg(s)是角速率陀螺的动力学。
若不满足GB(s)Gg(s)=1,则系统隔离度不为0,导引头输出的视线角信息对弹体姿态角速度不能完全解耦。
只有满足GB(s)Gg(s)=1,才能消除弹体扰动对视线角的扰动,也就是实现真正意义上的解耦。
3.3 分析结论
以往的理论分析,都是忽略掉导引头各环节的动力学特性,只考虑各环节增益。
若Kp,Kg,KB分别代表导引头测角环节、角速度陀螺、波控系统的增益,根据公式(5),可得隔离度表达式为:
从真实视线角速度t到导引头输出的视线角速度的传递函数为:
(1)对弹体扰动的解耦
认为1/KB是波控系统的刻度因数,用Ks表示。
则认为角速率陀螺与波控系统的刻度因数误差Kg-1/KB,也就是Kg-Ks,是造成全捷联相控阵雷达导引头隔离度的主要原因。
只有当角速率陀螺刻度尺Ks与波控系统刻度尺Kg一致,且以相同的规律波动时,也即Ks=-1/KB,才能消除弹体扰动对视线角的扰动,也就是实现真正意义上的解耦。
(2)时间常数
导引头时间常数tSD=Ks/KpK,为了导引头输入的视线角速度与输出的视线角速度稳态增益为1,则Ks=1,所以tSD=1/KpK。
时间常数与测角机构增益Kp 和运放增益K相关,又因为测角机构的增益Kp≈1,时间常数只与运放增益K相关,K越大,时间常数越小。
4 仿真验证
4.1 各环节动力学对导引头隔离度影响
导引头参数:增益:令Ks=1,且Kg=1,则刻度因数导致的隔离度问题不存在。
动力学特性:由于角速度陀螺的二阶特性,数据更新周期、测量延时以及波
控系统的数据测量周期对导引头隔离度有明显影响[13]~[17]。
所以在本次仿真中对于角速度陀螺,考虑数据更新周期、测量延时、陀螺二阶特性;对于波控系统,考虑数据测量周期;对于导引头测角环节,不考虑其动力学特性。
输入:弹体扰动角度幅值为1°、频率为3Hz,输入的视线角速度为0。
相控阵雷达导引头目标视线角速度输出曲线如图6所示。
由图6所示仿真结果可知,导引头输出的视线角速度幅值约为0.25°/s。
由于仿真中给出的导引头输入的视线角速度为0,所以导引头输出的视线角速度是由弹体扰动引起的。
将导引头输出的视线角速度与输入的弹体姿态角速度相除,计算可得相控阵雷达导引头隔离度约为1.33%(目标视线角速度幅值与弹体扰动角速度幅值之比)。
仿真说明在角速率陀螺与波控系统刻度因数一致,而动力学的不一致时,仍然会导致隔离度问题的产生。
4.2 响应速度受放大机构增益的影响
改变波束跟踪回路的增益K,得到波束转速(即测量到的视线角速度)如图7所示。
5 结束语
文章在考虑了全捷联相控阵雷达导引头测角环节、波控环节、速率陀螺的动力学特性的基础上,分析了导引头波束稳定与跟踪回路中,引起导引头隔离度问题的主要因素,通过对模型的分析,得出结论,角速率陀螺刻度尺Ks与波控系统刻度尺Kg一致,但动力学不一致时,仍然会产生隔离度问题,不能完全解耦。
导引头的响应速度与放大机构的增益有关,测角机构与放大机构的增益越大,导引头响应速度越快。
并且通过仿真验证了此结论。
参考文献
[1]王嘉鑫,林德福,祁载康,等.全捷联相控阵雷达导引头隔离度寄生回路研究[J].北京理工大学学报,2013,11(33).
[2]李富贵,夏群利,祁载康.全捷联导引头寄生回路影响与辨识校正[J].系统工程与电子技术,2013,35(8):73-78.
[3]王琪,付书堂.相控阵雷达导引头捷联波束稳定算法研究[J].航空兵器,2011(6):3-5.
[4]Zarchan P.Tactical and strategic missile guidance[M].5th ed.Virginia:AIAA Inc,2007.
[5]张光义.相控阵雷达原理[M].北京:国防工业出版社,2009:25-47.
[6]周瑞清,刘新华,史守峡,等.捷联导引头稳定与跟踪技术[M].国防工业出版社,2010,8.
[7]李秋生.相控阵雷达导引头捷联去耦技术研究[J].制导与引信,2005,26(2):19-22
[8]高烽.相控阵导引头的基本特点和关键技术[J].制导与引信,2005,26(4):1-5.
[9]何庆强,王秉中,殷忠良,等.导引头共形相控阵天线新技术[J].系统工程与电子技术,2006,28(12):1816-1819.
[10]高烽,周辉.一种捷联式数字角信息处理系统[J].制导与引信,2000,21(4):1-11.
[11]周瑞青,吕善伟,刘新华.捷联式天线平台的角跟踪系统设计[J].系统工程与电子技术,2003,25(10):1200-1202.
[12]林,姚郁,富小薇.捷联成像寻的器视线重构[J].光电工程,2006,33(3):40-53.
[13]Bertil EKSTRAND.Tracking filters and models for seeker application[J].IEEE Transactions on Aerospace and Electronic Systems,2001,37(3):965-977.
[14]R R Allen,S S BLACKMAN.Angle-only tracking with a MSC filter[C]//Digital Avionics Systems Conference,IEEE,1991.
[15]钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2006.
[16]赵超.弹载捷联天线稳定平台控制与仿真研究[J].制导与引信,2005,26(2):19-22.
[17]乔元新.由捷联导引头产生比例制导信号技术[J].制导与引信,1991(1):9-15.。