变速恒频励磁双馈风力发电机数学模型及控制研究
双馈变速恒频风电系统控制研究
1 引言根据国家能源局的统计数据,2022年我国用电量继续保持上升势头,全年用电量达到8.4万亿千瓦时,同比增长2.2%。
2030年,我国一次能源消费预计将达到60亿吨标准煤左右,若希望其中传统能源占比不超过80%,则意味着二十年内非化石能源需增加一倍之多[1],任务依旧十分艰巨。
随着风电技术和风力发电机组技术水平的提高,风电机组单机容量不断增加,风电行业向着大功率、高功率密度方向发展。
目前双馈风电机组的主流控制方式为电流源型矢量控制方式,但其缺乏自主的频率与电压支撑能力,而电压源型虚拟同步机控制方式能解决上述缺点,通过一种双馈风电机组电压源电流源双模式运行平滑切换控制策略,分析以上两种控制方式,使控制模式切换问题转变为保证电流内环输入与相位平滑切换问题[2]。
薛利晨等[3]在DSPACE环境中实时实现基于双馈感应发电机(DFIG)的风能转换系统(WECS)的自适应非线性控制策略,而且DSPACE-DS1104板与风力发电系统的实验台直接相关[4]。
目前,非线性反步控制器已经实现,用于控制通过两个转换器(电网侧和机器侧)直接连接到电网的双馈风电机组的转子动能和减载功率。
针对双馈异步风力发电机组的特点,孙浩宁等[5]从转子动能入手,通过控制减载运行方式,协调风机的转子动能与减载功率之间的关系,控制转子能量的释放过程,充分利用转子的旋转动能,可以提升风机电网调频能力;从另一个方面来说,随着风电渗透率的不断提高,双馈风电机组能够快速响应电网频率的变化,具有重要的惯性响应特性。
有学者从双馈感应发电机的励磁控制原理入手,对比了同步发电机在故障下的瞬态频率特性,提出双馈感应发电机可以通过励磁来控制发电机的转速或有功功率[6]。
为了减少风电场节点电压偏差和网络损耗,王耀翔等[7]基于双馈风电机组有功功率数据,估算出机组的无功功率极限,并分析了风电场的无功容量构成及计算方法以减小风电场节点电压偏差、降低网络损耗和利用风电机组无功潜力为目标,构建多目标问题,最后利用优化算法求解。
变速恒频双馈风力发电机组控制技术

随着传统能源的逐渐枯竭和环境问题的日益严重,开发可再生能源已
成为全球的迫切需求。风能作为一种清洁、可再生的能源,具有巨大
的开发潜力。
02
风力发电技术发展
随着风电技术的不断进步,风力发电机组的功率和效率得到了显著提
高。变速恒频双馈风力发电机组作为其中的一种重要技术,具有较高
的能量捕获能力和稳定性,得到了广泛关注。
变速恒频双馈风力 发电机组控制技术
2023-11-06
目录
• 引言 • 变速恒频双馈风力发电机组概述 • 变速恒频控制技术 • 双馈风力发电机组的矢量控制技术 • 双馈风力发电机组的直接功率控制技术 • 双馈风力发电机组控制技术的改进与优化建议 • 结论与展望
01
引言
研究背景与意义
01
能源危机和环境污染
直接功率控制策略的实验验证
实验平台
为了验证DPC策略的有效性, 需要建立实验平台,包括双馈 风力发电机组、电力电子设备
、测量仪器等。
实验过程
在实验平台上对DPC策略进行 验证,通过对励磁电流、转子 侧变换器电压等参数的调整, 观察双馈风力发电机的运行状
态和性能指标。
实验结果分析
通过对实验数据的分析,可以 评估DPC策略的控制效果和经 济效益。同时还可以对不同控 制策略进行比较和分析,以选
04
双馈风力发电机组的矢量控制 技术
基于矢量控制的双馈风力发电机组控制
01
02
03
矢量控制原理
基于矢量图的分析方法, 通过控制直交坐标系上的 两个分量来实现对电磁转 矩的控制。
矢量控制策略
通过控制励磁电流和转子 电流的幅值和相位,实现 对双馈风力发电机组的有 效控制。
变速恒频双馈风力发电机励磁控制技术研究

变速恒频双馈风力发电机励磁控制技术研究变速恒频双馈风力发电机是一种目前被广泛应用的风力发电机型号之一、它的励磁控制技术的研究对于提高风力发电机的发电效率和稳定性具有重要意义。
本文将从变速恒频双馈风力发电机的原理入手,介绍其励磁控制技术的研究现状和存在问题,并展望未来的发展方向。
变速恒频双馈风力发电机是一种采用双馈变速发电机作为发电机的风力发电系统。
其工作原理为:风能通过风轮驱动发电机转子旋转,产生电能。
其中,双馈发电机在转子和定子之间通过两个转换器将电能传递到电网中。
变速恒频控制技术的目的是根据风能的变化调整电机的转速,从而使发电机输出的电压频率保持稳定不变,并将其与电网的频率保持一致。
目前,变速恒频双馈风力发电机的励磁控制技术主要有三种类型:恒功率控制、恒风速控制和变频控制。
恒功率控制方法通过调节齿比传动装置来使得风力发电机输出的功率恒定。
恒风速控制方法通过调整转子的转速来使得风轮的转速保持恒定,从而达到一定的风速条件下输出恒定的功率。
变频控制方法通过控制发电机的频率来实现电网的频率同步。
然而,该技术在实际应用中还存在一些问题。
首先,励磁调节繁琐,难以实现精确控制。
其次,由于风力的不稳定性,变速恒频双馈风力发电机的输出功率会产生一定的波动,从而对电网的安全性和稳定性产生影响。
此外,传统的变速恒频控制方法对于风力发电机在不同气候条件下的风速响应能力较差。
未来的发展方向是改进现有的励磁控制技术,提高风力发电机的发电效率和稳定性。
一方面,可以研究开发更加精确的励磁控制算法,提高励磁系统的响应速度和控制精度。
另一方面,可以采用先进的传感器技术来实时监测和调节风力发电机的工作状态,以提高其对风力变化的响应能力。
此外,还可以结合机器学习等新兴技术,通过模型预测和预测控制来减小风力发电机输出功率的波动性。
综上所述,变速恒频双馈风力发电机励磁控制技术的研究对于提高风力发电机的发电效率和稳定性具有重要意义。
通过改进励磁控制算法和采用先进的传感器技术,可以提高风力发电机的响应能力和控制精度,减小输出功率的波动性。
变速恒频双馈风力发电机组交流励磁控制系统研究pdf

变速恒频双馈风力发电机组交流励磁控制系统研究鲍薇,尹忠东,任智慧(华北电力大学电力系统保护与动态安全监控教育部重点实验室,北京102206) 摘要:介绍了变速恒频双馈风力发电系统的工作原理,分析了双馈型风机的运行性能,重点对采用双PWM 换流器结构的交流励磁系统进行了介绍,提出了一种矢量控制策略,对网侧和转子侧变换器采用不同的矢量控制,从而实现不同的控制目标。
并通过EM TDC/PSCAD 软件进行了建模仿真,仿真表明,采用介绍的控制策略,能实现风力发电系统的最大风能追踪及有功无功解耦控制,保证输出功率稳定,实现高功率因数并网运行。
关键词:变速恒频;风力发电系统;交流励磁;PWM 换流器;矢量控制;最大风能追踪中图分类号:TM614 文献标识码:AStudy on AC -excited Control System of VSCF Doubly -fedWind Pow er G eneration SystemBAO Wei ,YIN Zhong -dong ,REN Zhi -hui(Key L aboratory of Power S ystem Protection and Dynamic Security Monitoring and Control under Ministry of Education N orth China Electric Power University ,Bei jing 102206,China )Abstract :The operation principle of doubly -fed VSCF wind power generation system was analyzed ,it es 2pecially introduced the doubly -fed generator ′s AC -excited system based on a structure of dual PWM con 2verter ,presented a vector control strategy ,which adopted different vector control between the grid -side con 2verter and the rotor side converter ,in order to achieve various control goals.The simulation on EM TDC/PSCAD software shows that adopting this control strategy this article presented ,it is able to track the largest wind energy ,achieves the decoupling control of wind power system ′s active and reactive power ,ensures the stability of output power and operate on high power factor.K ey w ords :variable -speed constant -frequency ;wind power generation system ;AC excitation ;PWM con 2verter ;vector control ;tracking largest wind power 基金项目:“十一五”国家科技支撑项目(2008BAA14B05) 作者简介:鲍薇(1985-),女,研究生,Email :baowei_19850627@1 引言目前我国的风电场装机绝大多数是恒速恒频机组。
变速恒频双馈风力发电系统控制技术的探讨

变速恒频双馈风力发电系统控制技术的探讨前言随着能源危机的日益加剧,可再生能源逐渐成为人们关注的热点。
风能作为最具潜力的可再生能源之一,引起了众多研究人员的关注。
近年来,变速恒频双馈风力发电系统控制技术成为研究热点之一,具有广阔的应用前景。
本文将对变速恒频双馈风力发电系统控制技术进行探讨。
双馈发电机和变频控制双馈发电机是目前风力发电机中最常使用的一类发电机。
传统的风力发电系统采用异步发电机作为发电机,随着风速的改变,输出电压、频率和电流也会跟随变化。
而采用双馈发电机后,输出电压和频率能够稳定控制在一个合适的范围内。
变频控制技术是指通过调整发电机输出电压和频率,使其与电网的电压和频率同步,从而实现电能的输送。
传统的电力系统一般采用恒频输电,这种方式下,不同的发电机必须调整其转速,以达到跟电网同步的效果,导致效率低下。
而采用变频控制技术,可以根据需要调整发电机的转速,使其在不同的风速下都能保持较高的效率。
变速控制技术变速控制技术是指通过改变风力发电机的转速,使其在不同的风速下都能保持较高的效率。
传统的风力发电系统中,往往采用固定转速的方式,无法灵活地调整转速以适应不同的风速。
而采用变速控制技术,则可以在不同的风速下,调整发电机的转速,以保证其输出的电量和质量。
曲线控制曲线控制技术是指通过调整双馈发电机的转速和输出电压,使其输出的电量和质量符合电网的要求。
传统的控制方法是基于刚性控制,不能灵活地调整发电机的参数。
而曲线控制技术,则可以根据电网的要求,调整发电机的控制参数,以保证其稳定地、高效率地运行。
软件控制技术软件控制技术是指通过计算机程序控制风力发电系统的运行。
传统的控制方式大多采用硬件控制,控制方式复杂、扩展性不强。
而采用软件控制技术,则能够通过计算机程序实现控制功能,提高系统的自动化程度。
结语变速恒频双馈风力发电系统控制技术是风力发电的研究热点之一,具有广阔的应用前景。
本文通过介绍双馈发电机和变频控制、变速控制、曲线控制、软件控制技术等方面,对其进行了探讨。
变速恒频双馈风力发电系统仿真研究
变速恒频双馈风力发电系统仿真研究变速恒频风力发电双馈异步发电机双PWM型变换器1引言风力发电是利用风能的一种有效形式,受到了广泛的关注。
和常规风力发电系统相比,变速恒频双馈风力发电系统具有功率因数可调、效率高等优点,同时变换器连接在转子回路,仅处理双向流动的转差功率,不仅具有变换器体积小、重量轻、成本低的特点,更可实现机电系统的柔性连接。
本文采用DFIG功率控制来实现最大风能追踪的实施方案。
基于最大风能追踪的需要,将磁场定向矢量控制技术应用到DFIG运行控制上,形成了基于定子磁链定向的DFIG有功、无功功率解耦控制策略;采用双PWM型变换器作为转子的励磁电源,基于电网电压定向矢量控制技术,实现了网侧变换器交流侧单位功率因数控制和直流环节电压控制。
在建立双馈风力发电系统仿真模型基础上,对整个系统进行了仿真分析,验证了该方案的正确性和可行性。
2 变速恒频双馈风力发电机的运行原理双馈型异步发电机(DFIG)采用绕线转子感应发电机,定子直接接电网,在转子侧施加交流励磁来控制发电机的转矩。
由DFIG实现的交流励磁,可以通过调节励磁电流的幅值、频率和相位实现灵活的控制;改变转子励磁电流的频率,DFIG可以实现变速恒频控制;改变转子励磁电流的相位,可以调节有功功率和无功功率[1][2]。
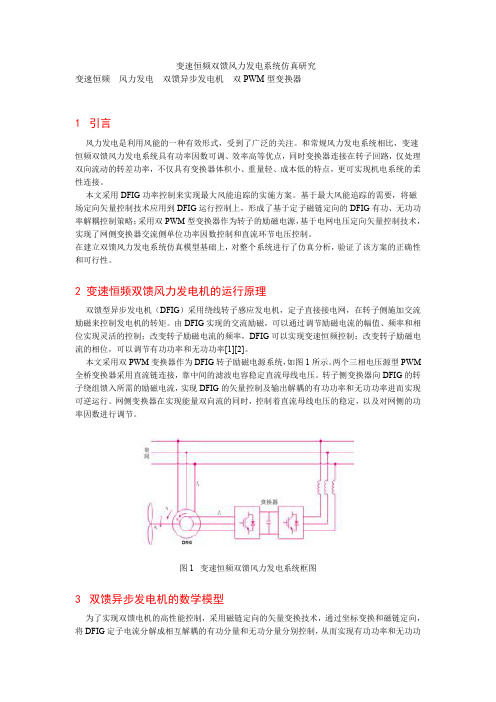
本文采用双PWM变换器作为DFIG转子励磁电源系统,如图1所示。
两个三相电压源型PWM 全桥变换器采用直流链连接,靠中间的滤波电容稳定直流母线电压。
转子侧变换器向DFIG的转子绕组馈入所需的励磁电流,实现DFIG的矢量控制及输出解耦的有功功率和无功功率进而实现可逆运行。
网侧变换器在实现能量双向流的同时,控制着直流母线电压的稳定,以及对网侧的功率因数进行调节。
图1 变速恒频双馈风力发电系统框图3双馈异步发电机的数学模型为了实现双馈电机的高性能控制,采用磁链定向的矢量变换技术,通过坐标变换和磁链定向,将DFIG定子电流分解成相互解耦的有功分量和无功分量分别控制,从而实现有功功率和无功功率的解耦控制。
变速恒频交流励磁双馈风力发电系统及其控制技术研究_1
2
2
r2 cos α ( s ( x1 + x m ) − r1 ( x 2 + x m )
(2-19)
+
r1 r2 sin α ( s + x1 x 2 + x m ( x1 + x 2 )
−
V1V2 x m ( Db cos α + Da sin α ) sD
(2-15)
& ∗ V & ) 转子每相无功功率为 Q2 = Im( 2 I 2 s
V 2 Q2 = 22 ( x1 + x 2 )r1 + ( x1 + x m )( x1 x 2 + x m ( x1 + x 2 )) s D
19
& 、E & (频率为 sf ) E 1 2 1 。 实质上,双馈电机与普通异步电机的工作原理是一致的。二者的区别在于普通异 步电机转子电流的频率取决于电机的转速,由转子短路条感应电势的频率决定,与转 差率有关,而转子电流本身的频率不能自主地、人为地调整。而双馈电机转子绕组的 频率由外加交流励磁电源供电,其频率可以随之变化调节。因此,双馈电机既具有异 步电机的工作原理,又具有同步电机的工作特性。 2.2.2 双馈发电机的等值电路[133]
2 2 2
& 为激磁电流; r 为激磁电阻; x 为激磁电抗; s 为转差率; E & 、E & 为感应 感抗; I m m m 1 2
电势。另外,由于 rm << x m ,故忽略 rm 。
20
运用“单时轴,多矢量法”概念,也就是假定: (1)每一相都取自己的相轴为时 & (时间相量)与该电流产生的磁势矢量 F (空间矢量) 轴; (2)任一相的电流相量 I
变速恒频双馈风电机组转子侧励磁变流器控制技术研究
电札 与柱 制 应 用 21 3 4 0L 8( )
变 速 恒 频 双 馈 风 电机 组 转 子 侧 励 磁 变 流 器控 制技 术 研 究 术
柴 熠 , 李 长乐
( 海 电器科 学研 究 所( 团) 限公 司 , 上 集 有 上海摘20 6 ) 0 0 3
计 , 以此为工 具 对 双馈 风 力 发 电机 的矢 量 控制 将
进行 设计 和分 析 。
1 1 双馈 风力 发 电机 的数 学模 型 .
为 了便于 分 析 , 如下 假 定 : 1 作 ( )忽 略定 、 转 子 电流高 次谐 波和定 、 转子 磁动 势高 次谐波 分量 ;
要: 介绍 了变频恒速双馈风力发 电机 的数学模型 , 分析了双馈风 电机组转 子侧变流器对 发电机励磁
的定 子 磁 链 定 向 的矢 量 控 制 策 略 , 论述 了采 用 定 子 磁 场 定 向 的矢 量 控 制 可 以 实 现 双 馈 风 力 发 电 机 输 出 的 有
功 功率 和无功功率解耦 。阐述 了变速恒频双馈风电机组转子侧变流器励磁控制策略 的仿真研究和试验波形 。
关 键 词 : 频 恒 速 ; 流 器 :矢 量 控 制 变 变
中 图 分 类 号 : M 3 12 文 献标 志码 : 文 章 编 号 :6 364 ( 0 1 0 -0 20 T 0 . A 17 —5 0 2 1 )404 -5
Ro o c t to nv r e n r lTe h o o y Re e c n ub e t r Ex ia i n Co e t r Co t o c n l g s a h i Do l - Fe f Va i to lS e nd Co s a tFr q n y d o ra i na pe d a n t n e ue c
变速恒频交流励磁双馈风力发电系统及其控制技术研究_2
压定向的矢量控制居多,原因在于励磁控制模型经过定向后,定子端口有功和无功 功率的表达式形式简洁,有利于控制系统的构成和实现。但采用定子电压定向的矢 量控制,其励磁控制模型中要涉及到转子磁链的计算,往往由于参数测量精度和温 升所导致的参数变化,尤其是电机转子回路参数的变化,将导致励磁控制模型的精 度降低,这是我们不希望看到的。因此,本章首先应用空间矢量的概念,首次提出 了三种适合双馈发电机分析和控制的复矢量模型,分析了三种复矢量模型之间的相 互关系和适用场合。建立了双馈发电机在两相同步旋转坐标系下的数学模型,揭示 了双馈发电机并网运行和独立运行在定子磁场定向控制策略下的内在统一和区别。 重点研究了基于背靠背电压源变换器并网型双馈发电机的控制目标、控制方式、运 行特性和系统功率流动等关键技术及其实现方法,并依据内模原理,运用复矢量模 型首次分析了系统耦合量的不同处理方式。其中,电网侧 PWM 变换器采用电网电 压矢量定向控制技术,保证了电网电流的正弦性。转子侧 PWM 变换器采用定子磁 场定向控制技术,在转速大范围变化的运行条件下,可获得定子端口有功和无功功 率的解耦控制。
34
式中,若 K = 2 3 , F =1 2 , A =1 , B =1 ,则该变换表示恒幅值变换;若
K = A= 2
3 ,F = B =1
文中所有坐标变换若不加以声明均采用恒功率变换,则式(3-4)可化为:
R − id L p i q = − ω i 0 0
∗ ∗ ∗
(3-1)
u sa = Lpi a + ia R + S a ∗ u dc + u n ∗ u sb = Lpib + ib R + S b u dc + u n u = Lpi + i R + S ∗ u + u c c c dc n sc
变速恒频双馈风力发电机励磁控制技术
CHAPTER 03
变速恒频双馈风力发电机励 磁控制技术
变速恒频双馈风力发电机数学模型
坐标变换
从三相静止坐标系到两相旋转 坐标系的变换,将三相交流变
量转换为直流变量。
数学方程
建立变速恒频双馈风力发电机的数 学模型,包括电压方程、电流方程 、状态方程等。
矢量图
利用矢量图对变速恒频双馈风力发 电机的数学模型进行解释,分析各 个变量之间的关系。
研究内容与方法
研究内容
本文主要研究变速恒频双馈风力发电机励磁控制技术,包括励磁控制策略、控 制系统设计、实验验证等方面。
研究方法
本文采用理论分析和实验验证相结合的方法,首先建立变速恒频双馈风力发电 机的数学模型,然后设计励磁控制系统并进行实验验证。
CHAPTER 02
双馈风力发电机工作原理
双馈风力发电机结构与特点
优化控制策略实现
基于模型的优化
通过建立系统的数学模型,对模型进行仿真实验,以验证控制策 略的有效性和可行性。
基于经验的优化
根据实际运行的经验和数据,对控制策略进行调整和优化,以达 到更好的性能。
基于人工智能的优化
利用人工智能技术,通过对大量数据的分析和学习,自动调整和 优化控制策略。
CHAPTER 05
市场机遇
随着新能源市场的不断扩大,变速恒频双馈风力发电机励磁控制技术的市场前景广阔,将迎来更多的 发展机遇。同时,技术的进步也将推动新能源领域的发展,为社会和经济的可持续发展贡献力量。
THANKS FOR WATCHING
感谢您的观看
电力电子技术
在电力电子技术的发展推动下,变速恒频双馈风力发电机 励磁控制技术将不断进步,提高电力系统的性能和稳定性 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 双馈型异步发电机的数学模型
为 了 研 究 交 流 励 磁 电 机 的 动 态 性 能 ,我 们 有 必 要 先 讨 论 交 流 励磁电机的动态数学模型。 2 . 1 首先是交流励磁发电机在三相静止轴系上的数学模型 2 . 1. 1 电 压 方 程 交流励磁发电机定子绕组电压方程为: u A = − rs i A + Dψ A ; u B = − rs iB + Dψ B ; uC = −rs iC + Dψ C 转子绕组电压方程为: u a = rr ia + Dψ a ; ub = rr + Dψ b ; uc = rr ic + Dψ c 可用矩阵形式表示为:
科技创新导报
2009 NO.31 Science and Technology Innovation Herald
学 术 论 坛
变速恒频励磁双馈风力发电机数学模型及控制研究
刘畅 ( 华北电力大学 吕跃刚 北京 1 0 2 2 0 8 ) 摘 要 : 讨论了变速恒频励磁双馈风力发电机常用的励磁控制策略和数学模型 , 分析其优点和缺陷 , 提出其重要的发展趋势。 关键词 : 变速恒频双馈 励磁控制策略 数学模型 中图分类号 : T M 3 1 文献标识码: A 文章编号 : 1 6 7 4-0 9 8 X(2 0 09 )1 1 (a )-0 21 2 -0 2
或写成: Ψ =Li 2 . 1. 3 运 动 方 程 转矩之间的平衡关系为:
1 变速恒频发电机的优势
变速恒频电机在以下几个方面具有同步电机所不具有的明显 优势: (1) 参与电力系统的无功功率调节 , 提高了整个系统的稳定性。 现 代 电 力 系 统 的 单 机 容 量 越 来 越 大 ,送 电 距 离 越 来 越 远 ,输 电 线 电 压 等 级 越 来 越 高,线 路 出 现 无 功 功 率 ,危 害 系 统 安 全 和 增 加 功 耗损失。 DFIG 可 以 调 节 励 磁 电 流 的 相 位 , 改 变 功 率 角 , 使 发 电 机 稳 定 运 行 ,可 通 过 交 流 励 磁 使 发 电 机 吸 收 更 多 的 无 功 功 率,参 与 电 网 的无功功率调节。 (2) 在 原 动 机 的 变 速 条 件 下 , 实 现 优 质 发 电 。 在 风 里 发 电 中 ,随 着 风 速 的 不 断 变 化 ,风 力 机 转 速 也 会 发 生 不 断 的 变 化 DFIG 可 以 。 可 以 通 过 调 节 转 子 励 磁 电 流 的 幅 值 ,频 率 和 相 位 ,在 风 机 转 速 变 化 时 发 出 恒 定 频 率 的 电 流 ,提 高 运 行 效 率 。 (3) 可 实 现 发 动 机 安 全 快 速 并 网 。 采 用 同 步 发 动 机 和 异 步 发 动 机 时 ,并 网 控 制 比 较 复 杂 ,需 要 精 确地转速控制和准同步的操作。 采 用 DFIG, 通 过 对 转 子 实 施 交 流 励 磁 ,调 节 发 电 机 定 子 输 出 电 压 ,实 现 安 全 快 速 的 并 网 操 作 。
Tm = Te +
J dω m n p dt
(3.1.3)
从 磁 场 能 量 根 据 机 电 能 量 转 换 原 理 ,可 以 得 出 电 磁 转 矩 方 程 :
Te =
1 T ∂Lrs T ∂Lsr n p ir is + i s ir ∂θ r 2 ∂θ r
2π = − n p Lms [(i Aia + iB ib + iC ic ) sin θ r + (i Aib + iB ic + iC ia ) sinθ r + 3 (3.1.4) 2π + (i Aic + iB ia + iC ib ) sinθ r − ] 3 通 过 分 析 ,该 数 学 模 型 既 是 一 个 多 输 入 多 输 出 的 高 阶 系 统 ,又 是一个非线性、 强耦合的系统。 为了使交流励磁电机具有可控性、 可 观 性 ,必 须 对 其 进 行 简 化 、 解 耦 ,使 其 成 为 一 个 线 形 、 解耦的系统。 2 . 2 三相静止坐标系到同步旋转 d - q - 0 坐标系的变换 经 过 相 变 换 及 矢 量 旋 转 变 换 , 容 易 得 出 三 相 坐 标 系 和 d-q-0 坐 标系之间定子量的变换矩阵:
1
− −
r
) )
qr
+
1
r
dr
d dt d + dt
dr
(3.3.2)
qr
2 . 3. 2 磁 链 方 程 d-q-0 坐 标 系 下 交 流 励 磁 发 电 机 磁 链 方 程 为 : 0 Lm 0 ids ψ ds − Ls i ψ 0 L 0 Lm − s qs = qs ψ dr − Lm 0 Lr 0 idr ψ − Lm 0 Lr iqr qr 0 即有定子磁链方程:
ψ A − L AA ψ − L B BA ψ C − LCA = ψ a − LaA ψ b − LbA − LcA ψ c
− LAB − LBB − LCB − LaB − LbB − LcB
− LAC − LBC − LCC − LaC − LbC − LcC
转子磁链方程:
ψ ds = − Ls ids + Lmidr ψ qs = − Ls iqs + Lmiqr ψ dr = − Lm ids + Lr idr ψ qr = − Lm iqs + Lr iqr
J d m np dt
(3.3.3)
P1 = u ds ids + u qs iqs 定 子 输 出 功 率 方 程 : Q = u i − u i qs ds ds qs 1 将 uds = 0 , u qs = U s 代 入 定 子 输 出 功 率 方 程 , 有 : P 1 = U s iqs (4.2.1) Q 1 = U s ids 把 ψ ds = ψ s , ψ qs = o 代 入 定 子 磁 链 方 程 , 有 : Ls ψs idr = L ids + L m m (4.2.2) i = Ls i qr qs Lm iqs 用 iqr 表 示 , 然 后 代 入 转 子 磁 链 把 式 4.2.2 中 的 ids 用 idr 表 示 、 ψ dr = aψ s + bidr 方程 , 整理可得 : (4.2.3) ψ qr = biqr 2 Lm Lm ) 式 中 , a = L , b = Lr (1 − Ls Lr s 再 将 式 4.2.3 代 入 转 子 电 压 方 程 , 进 一 步 整 理 可 得 :
ids i = qs i0 2π 2π cos(ϕ − ) cos(ϕ + ) cos ϕ 3 3 i A i A 2π 2π 2 ) − sin(ϕ + ) i B = C 3 s → 2 r − sin ϕ − sin(ϕ − i B 3 3 3 (3.2.1) 1 iC iC 1 1 2 2 2 T 由 于 恒 功 率 坐 标 变 换 矩 阵 为 正 交 矩 阵 , 易 知 : C 2 r →3s = C3 s→2 r
0 − rs 0 0 0 0
0 0 − rs 0 0 0
0 0 0 rr 0 0
0 0 0 0 rr 0
0 i A Dψ A i Dψ 0 B B 0 iC Dψ C + 0 ia Dψ a 0 ib Dψ b rr Dψ c ic
d( − dt
r
)
)。
212
科技创新导报 Science and Technology Innovation Herald
学 术 论 坛
u = − rs ids − ds u qs = − rs iqs +
1 qs
2009 NO.31 Science and Technology Innovation Herald
i dr i = qr i0
u A − rs u B 0 uC 0 = u a 0 ub 0 0 u c
或写成: u = R i +D Ψ 2 . 1. 2 磁 链 方 程 磁链方程式为:
科技创新导报
1
d dt d ds + dt +
ds
ψ dr = − Lm ids + Lr idr 转 子 磁 链 方 程 : ψ = − L i + L i m qs r qr qr (3.3.1)
J d m Tm = Te + n d t p 运动方程: T = n L (i i − i i )= n ( p m qs dr d压 方 程 。 在 进 行 类 似 定 子 电 压 方 程 坐 标 变 换 的 过 程 后 ,结 果 是 :
ds qs
i −
qs ds
i )
u = rr idr − ( dr u qr = rr iqr + (