燕庆明信号与系统(第二版)课后习题答案
《信号与系统》课后习题参考答案

《信号与系统》课后习题参考答案第二章 连续信号与系统的时域分析2-9、(1)解:∵系统的微分方程为:)(2)(3)(t e t r t r '=+',∴r(t)的阶数与e(t) 的阶数相等,则h(t)应包含一个)(t δ项。
又∵系统的特征方程为:03=+α,∴特征根3-=α∴)()(2)(3t u Ae t t h t -+=δ∴)]()(3[)(2)(33t e t u e A t t h t t δδ--+-+'=')()(3)(23t A t u Ae t t δδ+-'=-将)(t h 和)(t h '代入微分方程(此时e(t)= )(t δ),得:)()(3)(23t A t u Ae t t δδ+-'-+3)(2)]()(2[3t t u Ae t t δδ'=+-∴A=-6则系统的冲激响应)(6)(2)(3t u et t h t --=δ。
∴⎰⎰∞--∞--==t td ue d h t g τττδτττ)](6)(2[)()(3⎰∞-=t d ττδ)(2⎰∞---t d u e τττ)(63 )()(6)(203t u d e u t t ⎰-∞--=τττ )()3(6)(203t u e t u t --=-τ)()1(2)(23t u e t u t -+=- )(23t u e t -=则系统的阶跃响应)(2)(3t u et g t -=。
2-11、解:①求)(t r zi : ∵系统的特征方程为:0)3)(2(652=++=++αααα,∴特征根:21-=α,32-=α ∴t t zi e C eC t r 3221)(--+= (t ≥0) ②求)(t r zs :t t e A eA t h 3221)(--+= (t ≥0),可求得:11=A ,12-=A (求解过程略) ∴)()()(32t u e e t h t t ---=∴)(*)()(*)()]()[(*)()(*)()(3232t u e t u e t u e t u e t u e e t u e t h t e t r t t t t t t t zs --------=-==)()2121()()(21)()(3232t u e e e t u e e t u e e t t t t t t t -------+-=---= ③求)(t r :)(t r =)(t r zi +)(t r zs ++=--)(3221t te C e C )2121(32t t t e e e ---+- t tt e C e C e 3221)21()1(21---++-+= (t ≥0) ∵)()(t u Ce t r t -=,21=C 21=C ∴ 011=-C , ∴ 11=C0212=+C 212-=C ∴=-)0(r 21211)0(21=-=+=+C C r zi , ='-)0(r 2123232)0(21-=+-=--='+C C r zi 2-12、解:(1)依题意,得:)(2)(*)()(t u e t h t u t r tzi -=+)()()(t t h t r zi δ=+∴)(2)]()([*)()(t u e t r t t u t r t zi zi -=-+δ)(2)()()()1(t u e t r t u t r t zi zi --=-+∴)()12()()()1(t u e t r t r t zi zi -=---,两边求导得:)()12()(2)()(t e t u e t r t r t t zi ziδ-+-=-'-- )(2)()()(t u e t t r t r t zi zi--=-'δ ∴)(11)(112)()()1(t p p t p t t r p zi δδδ+-=+-=- ∴)()(11)(t u e t p t r t zi -=+=δ (2)∵系统的起始状态保持不变,∴)()(t u e t r t zi -=∵)()()(t t h t r zi δ=+,∴)()()(t u e t t h t--=δ∴)]()([*)()()(*)()()(33t u e t t u e t u e t h t e t r t r t t t zi ----+=+=δ )()()(t u te t u e t u e tt t ----+=)()2(t u e t t --= 2-16、证:∑∑∞-∞=--∞-∞=--=-=k k t k t k t u e k t t u e t r )3()3(*)()()3(δ∑∞-∞=--=k k t k t u e e )3(3 ∵当t-3k>0即3t k <时:u(t-3k)为非零值 又∵0≤t ≤3,∴k 取负整数,则:3003311)(---∞=∞=----===∑∑e e e e e et r t k k k t k t 则t Ae t r -=)(,且311--=e A 。
信号与系统(第二版)电子工业出版社【参考答案】

第一章1.8 系统的数学模型如下,试判断其线性、时不变性和因果性。
其中X (0-)为系统的初始状态。
(2)()()2f t y t e = (5)()()cos2y t f t t = (8)()()2y t f t = 解:(2)()()2f t y t e = ① 线性: 设 ()()()()1122,f t y t f t y t →→,则 ()()()()122212,f t f t y t ey t e==那么 ()()()()()()()112211222221122a f t a f t a f t a f t a f t a f t y t ee e +⎡⎤⎣⎦+→==,显然,()()()1122y t a y t a y t ≠+,所以是非线性的。
② 时不变性设()()11,f t y t →则 ()()()()10122110,f t t f t y t e y t t e-=-=设()()102,f t t y t -→则()()()102210f t t y t e y t t -==-,所以是时不变的。
③ 因果性因为对任意时刻 t 1,()()121f t y t e =,即输出由当前时刻的输入决定,所以系统是因果的。
(5)()()cos2y t f t t = ① 线性: 设 ()()()()1122,f t y t f t y t →→,则 ()()()()1122cos2,cos2y t f t t y t f t t ==那么()()()()()()()112211221122cos 2cos 2cos 2a f t a f t y t a f t a f t t a f t t a f t t +→=+=+⎡⎤⎣⎦, 显然()()()1122y t a y t a y t =+,所以系统是线性的。
② 时不变性设()()11,f t y t →则 ()()()()()1110100cos2,cos2y t f t t y t t f t t t t =-=--设()()102,f t t y t -→则()()()21010cos2y t f t t t y t t =-≠-,所以是时变的。
信号与系统课后答案(全)
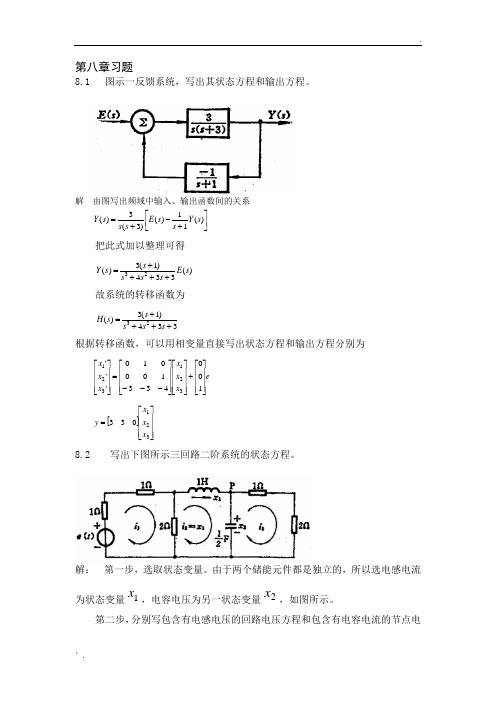
第八章习题8.1 图示一反馈系统,写出其状态方程和输出方程。
解由图写出频域中输入、输出函数间的关系⎥⎦⎤⎢⎣⎡+-+=)(11)()3(3)(sYssEsssY把此式加以整理可得)(334)1(3)(23sEsssssY++++=故系统的转移函数为334)1(3)(23++++=sssssH根据转移函数,可以用相变量直接写出状态方程和输出方程分别为exxxxxx⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡143311'''321321[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=32133xxxy8.2 写出下图所示三回路二阶系统的状态方程。
解:第一步,选取状态变量。
由于两个储能元件都是独立的,所以选电感电流为状态变量1x,电容电压为另一状态变量2x,如图所示。
第二步,分别写包含有电感电压的回路电压方程和包含有电容电流的节点电流方程。
根据第二个回路的回路方程,并代入元件参数,则有112122'ixxx+--=312'21ixx-=第三步,上两式中1i和3i不是状态变量,要把它们表为状态变量。
由第一个回路有1124xie-=,即112141xei+=由第三个回路有323ix=,即2331xi=把1i和3i分别代入第二步中两式,并经整理,最后得所求状态方程为exxx21'211+--=212322'xxx-=或记成矩阵形式8.3 图示一小信号谐振放大器的等效电路,这里的激励函数)(t e是一压控电流源,输出电压)(t y由耦合电路的电阻L R上取得。
要求写出此电路的状态方程和输出方程。
解:第一步,选状态变量。
因为电感电流和电容电压等三个变量都是独立的,所以选回路电感L中的电流1x、回路电容C上的电压2x、耦合电容c C上的电压3x为状态变量。
第二步,分别写回路方程或节点方程。
由RLC回路有211'xRxLx=+eixxCCx rc-=+++132''RL c i x C ='3第三步,消去非状态变量。
信号与系统教程燕庆明答案

信号与系统教程燕庆明答案【篇一:信号与系统课后习题】t)?tf(t?td),tf(t?t0)?yf(t?t0)?,yf(t?t0)?(t?t0)f(t?t0)。
(3)令g(t)?f(t?t0),t[g(t)]?g(?t)?f(?t?t0),tf(t?t0)? yf(t?t0),yf(t?t0)?f(?t?t0)1.2.已知某系统输入f(t)与输出y(t)的关系为y(t)?f(t)判断该系统是否为线性时不变系统?解:设t为系统运算子,则y(t)可以表示为y(t)?t[f(t)]?f(t),不失一般性,设f(t)?f1(t)?f2(t)t[f1(t)]?f1(t)?y1(t),t[f(t)]?f1(t)?f2(t)?y(t),显然其不相等,即为非线性时不变系统。
df(t)tf(x)dx(2):[y(t)]2?y(t)?f(t) 1.3判断下列方程所表示系统的性(1):y(t)?0dt(3):y(t)?2y(t)?3y(t)?f(t)?f(t?2)(4):y(t)?2ty(t)?2y(t)?3f(t) 线性非线性时不变线性时不变线性时变1.4。
试证明方程y(t)+ay(t)=f(t)所描述的系统为线性系统。
证明:不失一般性,设输入有两个分量,且f1(t)→y1(t),f2(t)→y2(t) 则有y1(t)+ay1(t)=f1(t),y2(t)+ay2(t)=f2(t) 相加得y1+ay1(t)+y2(t)+ay2(t)=f1(t)+f2(t) 即d[y1(t)+y2(t)]+a[y1(t)+y2(t)] dt=f1(t)+f2(t)可见f1(t)+f2(t)→y1(t)+y2(t)即满足可加性,齐次性是显然的。
故系统为线性的。
1.5。
证明1.4满足时不变性。
证明将方程中的t换为t-t0,t0为常数。
即y(t-t0)+ay(t-t0)=f(t-t0) 由链导发则,有dy(t?t0)dtd(t?t0)dy(t?t0)d(t?t0)dy(t?t0)dy(t?t0)1从而又因t0为常数,故所以有 ??dtd(t?t0)dtdtd(t?t0)dy(t?t0)ay(tt0)f(tt0)即满足时不变性f(t-t0)→y(t-t0) dty(t)?y(t?t0)f(t)?f(t??t)?所以ttlimf(t)?f(t??t)limy(t)?f(t?t0)既有 f(t)?y(t) ?t0t0tt1.7 若有线性时不变系统的方程为y(t)+ay(t)=f(t)在非零f(t)作用下其响应y(t)=1-e-t,试求方程y(t)+ay(t)=2f(t)+f(t)的响应。
信号与系统课后答案(第二版)+曾禹村+第二章作业参考答案
i1(t) = i2 (t) + i3 (t) , i2 (t) R2 − L 有 8i2 `(t) + 3i2 (t) = 2e`(t) ˆ ˆ 由 h`(t) + 3h(t) = 2δ (t)
0
h
(−1) t 3
T
t
t 3E − τ E (t) = ∫ δ (τ )dτ − ∫ e 8 u(τ )dτ −∞ 4 −∞ 32
x(t)
1
2 t
yx(t)
1 2 3 4 t
0
1
0
Qh(0) = 0, t ≤ 0, 有 0 ≤ t <1 , h(t) + h(t −1) + h(t − 2) = h(t) = t 时 1≤ t < 2时 h(t) + h(t −1) + h(t − 2) = h(t) + h(t −1) =1 , h(t) =1− h(t −1) =1− (t −1) = 2 −t 2 ≤ t < 3 , h(t) + h(t −1) + h(t − 2) =1 时 h(t) =1− h(t −1) − h(t − 2) =1− (2 − (t −1)) − (t − 2) = 0 3 ≤ t < 4时 h(t) = 4 − t − h(t −1) − h(t − 2) =4 −t − 0 − (2 − (t − 2)) = 0 , t, 0 ≤ t < 1 ∴h(t) = 2 − t, 1 ≤ t ≤ 2 0, t < 0,2 < t
解: (e) 特征方程为 λ2+4λ+4=0 得 λ1=-2, λ2=-2。 则 h(t)= (c1eλ1 t+ c2eλ2t)u(t)=( c1e- 3 t+ c2e-2 t)u(t) h`(t)= (c1+ c2)δ(t)+(-3c1e- 3 t-2c2e- 2t)u(t) h``(t)= (c1+ c2)δ`(t)+(-3c1-2c2) δ(t)+ (9c1e- 3 t+4c2e- 2t)u(t) 将x(t)= δ(t), y(t)=h(t)代入原方程得:
信号与系统燕庆明(第二版)第6章 系统函数与零、极点分析
系数(标量) 乘法器:
积分器:
bn bn -1s -1 b0 s -n N ( s) 将H(s)改写如下: H ( s) -1 -n 1 an -1s a0 s D( s )
F ( s) F ( s) Y ( s) H ( s) F ( s) N ( s) N ( s) X ( s) 其中X ( s) D( s ) D( s )
(a) H ( s)
二、稳定性判据
必要条件: H( s )的分母多项式
D( s) an s n an -1s n -1 a1s a0
的全部系数非零且均为正实数。
充要条件:对三阶系统, ( s) a3s 3 a2 s 2 a1s a0 的 D
各项系数全为正,且满足 a1a2 a0 a3
34.5s 2 119.7 s 98.1 N ( s) H ( s) 3 2 s 35.714s 119.741s 98.1 D( s)
显然 a1a2 > a0a3 故系统稳定。
§6.4 S域分析用于控制系统
一、开环与闭环控制
开环控制:输出的被控对象对输入控制量不产生影
响。 闭环控制: 输出信号的全部或部分返回到输入端 对控制量产生影响。用于反馈自动控制系统。
开环系统
闭环系统
负反馈系统:
H ( s) Y ( s) H1 ( s ) F ( s ) 1 H1 ( s ) H 2 ( s )
反馈系统框图
例
反馈系统示例
对(a):
H (s) K1K 2 1000 10 1 K1K 2 1 0.099 1000 K1K 2 5 100 9.9 1 K1K 2 1 0.099 500
信号与系统_第二版_奥本海默 _课后答案[1-10章]
![信号与系统_第二版_奥本海默 _课后答案[1-10章]](https://img.taocdn.com/s3/m/6ff45c8f83c4bb4cf6ecd112.png)
学霸助手[]-课后答案|期末试卷|复习提纲
学霸h助us手 Contents baz Chapter 1 ······················································· 2 xue Chapter 2 ······················································· 17
e 5 = 5 j0 ,
e -2 = 2 ,jp
e -3 j = 3
-
j
p 2
e 1
2
-
j
3 2
=
, -
j
p 2
e 1+ j =
2
, j
p 4
( ) 1- j e 2 =2
-
j
p 2
ep
j(1- j) = 4 ,
e 1+
1-
j j
=
p 4
e 2 + j 2 = -1p2
1+ j 3
ò e 1.3.
(a)
xue学ba霸zh助usS手hoiug.ncoaml(Sseco&nd EdSitioyn)stems
—Learning Instructions
xu(eEbxe学arzc霸hisue助sshA手onus.wceorms)
Department
of
Computer 2005.12
Enginexeurein学bga霸zh助us手
=¥
E¥
0
-4tdt
=
1 4
,
P ¥ =0, because
E¥ < ¥
手 om ò (b)
x e , 2(t) = j(2t+p4 )
《信号与系统(第2版》【附录+习题答案】

附 录 A 常 用 数 学 公 式A.1 三角函数公式j e cos jsin t t t ωωω=+ j e e (cos jsin )t t t σωσωω+=+j j 1cos (e e )2t t t ωωω-=+j j 1sin (e e )2jt t t ωωω-=-sin()sin cos cos sin αβαβαβ±=± cos()cos cos sin sin αβαβαβ±=sin22sin cos ααα=2222cos2cos sin 12sin 2cos 1ααααα=-=-=-1sin sin [cos()cos()]2αβαβαβ=--+1cos cos [cos()cos()]2αβαβαβ=-++1sin cos [sin()sin()]2αβαβαβ=-++双曲正弦:e e sh 2x xx --=双曲余弦:e e ch 2x xx -+=A.2 微积分公式d()d Cu C u =,C 为常数(下同)d()d d u v u v ±=±,u 、v 为t 的函数(下同) d()d d uv v u u v =+ 2d d d u v u u v v v -⎛⎫= ⎪⎝⎭d d Cu t C u t =⎰⎰()d d d u v t u t v t ±=±⎰⎰⎰信号与系统288d d u v uv v u =-⎰⎰()d ()()()()d ()bb baaau t v t u t v t v t u t =-⎰⎰A.3 数列求和公式(1)等比数列123,,,,N a a a a 的通项为11n n a a q -=,q 为公比,前n 项的和为 111(1)11NN N N n n a a q a q S a q q =--===--∑(2)等差数列123,,,,N a a a a 的通项为1(1)n a a n d =+-,d 为公差,前n 项的和为111()(1)22NN N n n N a a N N dS a Na =+-===+∑附 录 B 常 用 信 号 与 系 统 公 式B.1 连续时间信号的卷积121221()()()()d ()()d x t x t x x t x x t ττττττ∞∞-∞-∞*=-=-⎰⎰B.2 离散时间信号的卷积121221()()()()()()m m x n x n x m x n m x m x n m ∞∞=-∞=-∞*=-=-∑∑B.3 连续时间三角形式的傅里叶级数0000011()[cos()sin()]cos()kk kkk k x t a ak t b k t A A k t ωωωϕ∞∞===++=++∑∑0000001()d t T t a A x t t T +==⎰000002()cos()d 1,2,t T k t a x t k t t k T ω+==⎰, 000002()sin()d 1,2,t T k t b x t k t t k T ω+==⎰,1,2,k A k = arctan 1,2,k k k b k a ϕ⎛⎫=-=⎪⎝⎭,B.4 连续时间指数形式的傅里叶级数FS000j 01()e d t T k t k t X x t t T ω+-=⎰0j 0()()ek tk x t X k ωω∞=-∞=∑信号与系统290B.5 连续时间傅里叶变换FTj (j )()e d t X x t t ωω∞--∞=⎰j 1()(j )e d 2πt x t X ωωω∞-∞=⎰B.6 双边拉普拉斯变换()()e d st X s x t t ∞--∞=⎰j j 1()()e d 2πjst x t X s s σσ+∞-∞=⎰B.7 单边拉普拉斯变换0()()e d st X s x t t ∞--=⎰j j 1()()e d 2πjst x t X s s σσ+∞-∞=⎰,0t ≥B.8 离散时间傅里叶级数DFS2πj 1()()ekn NN N n N X k x n N -=<>=∑,0,1,2,k =±±2πj()()ekn NN N k N x n X k =<>=∑,0,1,2,n =±±B.9 离散时间傅里叶变换DTFTj j (e )()enn X x n ΩΩ∞-=-∞=∑j j 2π1()(e )e d 2πn x n X ΩΩΩ=⎰B.10 离散傅里叶变换DFT1()()01N knNn X k x n Wk N -==-∑≤≤,附 录 B 常 用 信 号 与 系 统 公 式29111()()01N kn Nk x n X k Wn N N--==-∑≤≤,B.11 双边Z 变换b ()()nn X z x n z∞-=-∞=∑11()()2n cx n X z z dzj π-=⎰B.12 单边Z 变换s 0()()nn X z x n z∞-==∑11()()2n cx n X z z dzj π-=⎰习题参考答案第1章1.1(a)确定信号、连续时间信号、非周期信号、能量信号、非因果信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
())()()]([),()(20d t t tf t tg t g T t t f t g -==-=令,∞-≠-)()(00t t y t t T f f ,=-)(0t t y f)()(00t t f t t --。
(3))()(0t t f t g -=令,)()()]([0t t f t g t g T --=-=,≠-)(0t t T f )(0t t y f -,)()(00t t f t t y f +-=-线性时不变系统。
显然其不相等,即为非不失一般性,设可以表示为为系统运算子,则设解时不变系统?判断该系统是否为线性的关系为与输出已知某系统输入),()()()]([),()()]([)()()(,)()]([)()(T :)()()()(.2.12111121t y t f t f t f T t y t f t f T t f t f t f t f t f T t y t y t f t y t y t f =+===+====1.3判断下列方程所表示系统的性⎰+=t dx x f dtt df t y 0)()()(:)1()()()]([:)2(2't f t y t y =+(3):)2()()(3)(2)(''''-+=++t f t f t y t y t y (4):)(3)(2)('2)("t f t y t ty t y =++ 线性 非线性时不变 线性时不变 线性时变1.4。
试证明方程y'(t)+ay(t)=f(t)所描述的系统为线性系统。
证明:不失一般性,设输入有两个分量,且f 1(t)→y 1(t),f 2(t)→y 2(t) 则有y 1'(t)+ay 1(t)=f 1(t),y 2'(t)+ay 2(t)=f 2(t) 相加得y 1'+ay 1(t)+y 2'(t)+ay 2(t)=f 1(t)+f 2(t) 即dtd[y 1(t)+y 2(t)]+a[y 1(t)+y 2(t)] =f 1(t)+f 2(t )可见f 1(t)+f 2(t)→y 1(t)+y 2(t)即满足可加性,齐次性是显然的。
故系统为线性的。
1.5。
证明1.4满足时不变性。
证明 将方程中的t 换为t-t 0,t 0为常数。
即y'(t-t 0)+ay(t-t 0)=f(t-t 0) 由链导发则,有=-dtt t dy )(0 dt t t d t t d t t dy )()()(000-•--又因t 0为常数,故1)(0=-dtt t d 从而)()()(000t t d t t dy dt t t dy --=-所以有 )()()(000t t f t t ay dtt t dy -=-+-即满足时不变性f(t-t 0)→y(t-t 0) 1.6.试一般性地证明线性时不变系统具有微分特性。
证明 设f(t)→y(t),则f(t-Δt)→y(t-Δt)又因为tt t y t y t t t f t f ∆--→∆∆--)()()()(0所以 tt t f t y t t t t f t f t ∆--→∆→∆∆--→∆)()(0lim )()(0lim 0既有 )(')('t y t f →1.7 若有线性时不变系统的方程为y'(t)+ay(t)=f(t)在非零f(t)作用下其响应y(t)=1-e -t ,试求方程y'(t)+ay(t)=2f(t)+f'(t)的响应。
解:因为f(t)→y(t)=1-e -t ,又线性关系,则2f(t)→2y(t)=2(1-e -t ) 又线性系统的微分特性,有 f'(t)→y'(t)=e -t 故响应 2f(t)+f'(t)→y(t)=2(1-e -t )+e -t =2-e -t计算:2.1设有如下函数f( t ),试分别画出它们的波形。
(a) f( t ) = 2ε( t-1 ) - 2ε( t-2 )(b) f( t ) = sinπt[ε( t ) -ε( t-6 )]2-2试用阶跃函数的组合表示题2-4图所示信号。
解(a) f( t ) = ε( t ) - 2ε( t-1 ) + ε( t-2 )(b) f( t ) = ε( t ) + 2ε( t-T ) + 3ε( t-2T )2-5设有题2-6图示信号f( t ),对(a)写出f'( t )的表达式,对(b)写出f"( t )的表达式,并分别画出它们的波形。
解(a)2,21≤≤tf'( t ) = δ( t- 2 ),t = 2-2δ( t- 4 ),t = 4(b)f"( t ) = 2δ( t )- 2δ( t- 1 )- 2δ( t- 3 ) + 2δ( t- 4 )()()()()2()()(3)(3)(3);()()sin()()()22;()costa f t t f tb t t t tc e t td t t tδδδδδδδδδ--=-+•==•=2.6.化简下列信号:2-7 试计算下列结果。
(1) t δ( t - 1 ) (2) ⎰∞--0d )()3πcos(t t t δω (3)⎰+---003d )(e t t t δ (4)⎰∞∞--t t t d )1(δ (5)∞-∞⎰t δ( t - 1 )dt (6)()()2213tt t dt δ-+-⎰(7) ()2td δττ-∞⎰解 (1) t δ( t - 1 ) = δ( t - 1 ) (2)21d )()3πcos(d )()3πcos(00=-=-⎰⎰∞∞--t t t t t δδω(3)1d )(d )(e d )(e 00003003===-⎰⎰⎰+-+-+---t t t t t t tt δδδ (4) 1d )1(d )1(=-=-⎰⎰∞∞-∞∞-t t t t t δδ(5)∞-∞⎰t δ( t - 1 )dt=∞-∞⎰δ( t - 1 )dt=1 (6)=0 (7)=2()t ε3-1 如图2-1所示系统,试以u C ( t )为输出列出其微分方程。
解 由图示,有tu C R u i d d C C L +=又⎰-=tt u u L i 0C S L d )(1故CC C S )(1u C Ru u u L ''+'=-从而得 )(1)(1)(1)(S C C C t u LC t u LC t u RC t u =+'+''3-3 设有二阶系统方程0)(4)(4)(=+'+''t y t y t y 在某起始状态下的0+起始值为2)0(,1)0(='=++y y 试求零输入响应。
解 由特征方程λ2 + 4λ + 4 =0得 λ1 = λ2 = -2则零输入响应形式为te t A A t y 221zi )()(-+=由于y zi ( 0+ ) = A 1 = 1 -2A 1 + A 2 = 2所以A 2 = 4故有0,)41()(2zi ≥+=-t et t y t3-4 如题2-7图一阶系统,对(a)求冲激响应i 和u L ,对(b)求冲激响应u C 和i C ,并画出它们的波形。
解 由图(a)有Ri t u t i L-=)(d d S 即)(1d d S t u Li L R t i =+当u S ( t ) = δ( t ),则冲激响应 )(e 1)()(t L t i t h t L R ε⋅==-则电压冲激响应)(e )(d d )()(L t L R t t i L t u t h tL R εδ⋅-===-对于图(b)RC 电路,有方程R u i t u CC S C d d -=即S C C 11i Cu RC u =+'当i S = δ( t )时,则)(e 1)()(C t Ct u t h RC t ε⋅==-同时,电流)(e 1)(d d C C t RC t t u C i RCtεδ⋅-==-3-5 设有一阶系统方程)()()(3)(t f t f t y t y +'=+'试求其冲激响应h ( t )和阶跃响应s ( t )。
解 因方程的特征根λ = -3,故有)(e)(31t t x tε⋅=-当h ( t ) = δ( t )时,则冲激响应)(e 2)()]()([)()(31t t t t t x t h t εδδδ⋅-=+'*=-阶跃响应)()e 21(31d )()(30t h t s t t εττ-+==⎰1012121122223.6,()()()()0(0),,(01),(2),(23),(2),(12),11(2),(34),0,(4)0,,12,1222tt t LTI f t y t h t f t t d t d d t d d t d t t t t t ττττττττττττ--=*=<≤≤+-≤≤+-≤≤-≤≤>=-+--+⎰⎰⎰⎰⎰⎰系统的冲激响应如图(a)若输入信号如图(b)所示三角波,求零状态响应?本题用图形扫描计算卷积即2211,84,022t t t t --+()()()()()''''22223.10()()3()2()5()7()()2235p 723(32)()(57)()H(p)p 321223()()()23,0()(21)()(12t t h t y t y t y t f t f t b y t y t y t f t f t p p y t p f t p p p h t t e e t b p p y t p p δ--''''++=+++=++++=+==+++++=+=+≥++=++算子法求下列系统的冲激响应。
(a)解:(a)系统的算子方程从而从而22223)()2p 31212H(p)()()2,0p 211111t t p f t h t t te e t p p p p p δ--++==+=+=+≥++++++,从而【】()()3-11 试求下列卷积。
(a) ε( t + 3 ) * ε( t - 5 ) (b) δ( t ) * 2 (c) t e -t ⋅ε( t ) * δ' ( t ) 解 (a) 按定义ε( t + 3 ) * ε( t - 5 ) =⎰∞∞---+ττετεd )5()3(t 考虑到τ < -3时,ε( τ + 3 ) = 0;τ > t -5时,ε( t -τ - 5 ) = 0,故ε( t + 3 ) * ε( t - 5 ) =2,2d 53>-=⎰--t t t τ(b) 由δ( t )的特点,故δ( t ) * 2 = 2 (c) t e -t ⋅ε( t ) * δ' ( t ) = [t e -t ε( t )]' = ( e -t - t e -t )ε( t ) 3-12 对图示信号,求f 1( t ) * f 2( t )。