实验三 位移测量实验
物理实验测量速度的方法
物理实验测量速度的方法速度是物理学中一个重要的概念,用于描述物体在单位时间内变化的位置。
准确测量速度对于研究物体的运动特性以及推导公式、探索规律等方面都具有重要意义。
在物理实验中,有多种方法可以用来测量速度,下面将介绍几种常见的方法及其原理。
一、位移和时间法位移和时间法是一种常用的测量速度的方法。
它的原理很简单,只需要测量物体在一段时间内的位移,并与该时间段相除,即可得到平均速度。
这种方法适用于测量匀速运动的速度。
实验步骤:1. 准备一个直线轨道,并在轨道上选择两个固定的位置点A和B。
2. 将测量物体放置在A点,并记录下开始时刻的时间t1。
3. 启动计时器,让物体沿轨道运动到B点,并记录下到达B点时的时间t2。
4. 计算位移Δx = AB的距离。
5. 计算速度v = Δx / (t2 - t1)。
二、利用弹射法测速弹射法是一种精确测量速度的方法,可以用于测量较高速度的物体。
它基于牛顿第二定律的原理,即物体受到的作用力与加速度成正比。
实验步骤:1. 准备一个弹射器,以及一些小球。
2. 将小球放入弹射器中,并将弹射器调整成适当的角度。
3. 发射小球,并同时计时。
4. 测量小球击中目标的距离x。
5. 根据牛顿第二定律 F = ma,将小球的重力和弹射器对小球的推力进行分析,可以得到速度v = sqrt(2gx)。
三、用光栅法测速光栅法是一种利用光的衍射原理测量速度的方法。
它可以精确测量物体的瞬时速度,适用于快速变化的运动。
实验步骤:1. 准备一个光栅和一个高速相机。
2. 将光栅放置在实验区域中,确保物体经过光栅时能够造成明显的光强变化。
3. 使用高速相机拍摄光栅运动的过程。
4. 根据光栅上的条纹变化和相机拍摄的时间间隔,可以测量出物体通过光栅的时间。
5. 根据光栅的空间周期和通过光栅的时间,可以计算出物体的瞬时速度。
总结:以上介绍了三种常见的物理实验测量速度的方法,分别是位移和时间法、弹射法和光栅法。
实验1 位移测量实验

实验三电涡流传感器位移测量实验一、实验目的:了解电涡流传感器测量位移的工作原理和特性。
二、基本原理:电涡流式传感器是一种建立在涡流效应原理上的传感器。
电涡流式传感器由传感器线圈和被测物体(导电体—金属涡流片)组成,如图22.1.1所示。
根据电磁感应原理,当传感器线圈(一个扁平线圈)通以交变电流I1(频率较高,一般为1MHz~2MHz)时,线圈周围空间会产生交变磁场H1,当线圈平面靠近某一导体面时,由于线圈磁通链穿过导体,使导体的表面层感应出呈旋涡状自行闭合的电流I2,而I2所形成的磁通链又穿过传感器线圈,这样线圈与涡流“线圈”形成了有一定耦合的互感,最终原线圈反馈一等效电感,从而导致传感器线圈的阻抗Z发生变化。
我们可以把被测导体上形成的电涡等效成一个短路环,这样就可得到如图22.1.2的等效电路。
图22.1.1 电涡流传感器原理图图22.1.2 电涡流传感器等效电路图图中R1、L1为传感器线圈的电阻和电感。
短路环可以认为是一匝短路线圈,其电阻为R2、电感为L2。
线圈与导体间存在一个互感M,它随线圈与导体间距的减小而增大。
根据等效电路可列出电路方程组:通过解方程组,可得I1、I2。
因此传感器线圈的复阻抗为:线圈的等效电感为:线圈的等效Q值为:式中:Q0—无涡流影响下线圈的Q值,Q0=ωL1/R1;Z22—产生电涡流部分的阻抗,Z22=R22+ω2L22。
由式Z、L和式Q可以看出,线圈与金属导体系统的阻抗Z、电感L和品质因数Q值都是该系统互感系数平方的函数,而从麦克斯韦互感系数的基本公式出发,可得互感系数是线圈与金属导体间距离x(H)的非线性函数。
因此Z、L、Q均是x的非线性函数。
虽然它整个函数是一非线性的,其函数特征为"S"型曲线,但可以选取它近似为线性的一段。
其实Z、L、Q的变化与导体的电导率、磁导率、几何形状、线圈的几何参数、激励电流频率以及线圈到被测导体间的距离有关。
如果控制上述参数中的一个参数改变,而其余参数不变,则阻抗就成为这个变化参数的单值函数。
物理实验技术中的位移测量使用方法
物理实验技术中的位移测量使用方法引言物理实验中,位移测量是非常重要的一项技术,它可以帮助我们准确地测量物体在空间中的位置变化。
不同的实验需要不同的位移测量方法,本文将为大家介绍一些常见的物理实验中的位移测量使用方法。
一、光电法光电法是一种常见的位移测量方法,它利用光束的投射和接收来测量物体的位移。
该方法基于光电效应,通过光电传感器接收光束反射回来的光信号,进而计算物体的位移。
光电法测量位移快速准确,广泛应用于各种实验中,例如光栅移位传感器用于测量光栅条纹的位移。
二、激光干涉法激光干涉法是一种高精度的位移测量方法。
它利用激光光束的干涉现象来测量物体的位移。
将一束激光光束分成两束,分别照射到被测物体上,通过干涉效应,可以测量出物体的微小位移。
激光干涉法在实验室中广泛应用,例如在微纳尺度测量和光学仪器校准中。
三、位移传感器位移传感器是物理实验中最常用的位移测量设备之一。
位移传感器可以通过测量物体的伸缩变化、电容变化、电感变化等来获得位移信息。
它们通常由传感器头和信号处理部分组成。
常见的位移传感器有电容传感器、电感传感器和线性变阻传感器等。
根据实验需求,可以选择不同类型的位移传感器来实现高精度的位移测量。
四、高速相机法高速相机法是一种用于测量物体运动位移的方法。
它通过使用高帧率的相机来捕捉物体连续的图像。
通过分析这些图像中物体的移动情况,可以推算出物体的位移。
高速相机法在物理实验中广泛用于研究快速运动的物体,例如高速冲击试验和流体动力学研究。
五、声波测距法声波测距法是一种基于声音传播速度的位移测量方法。
它通过发射声波并接收反射回来的声波来测量物体的位移。
声波的传播速度是已知的,通过计算声波发射时刻与接收时刻的时间差,可以准确测量出物体的位移。
声波测距法广泛应用于工业领域和物理实验中的位移测量。
结论位移测量是物理实验中不可或缺的一项技术,通过光电法、激光干涉法、位移传感器、高速相机法和声波测距法等不同的测量方法,我们可以获得准确的位移数据。
山东交通学院实验三 霍尔式位移传感器的直流激励特性
实验三霍尔式位移传感器的直流激励特性一、实验目的:了解霍尔式传感器的原理与特性。
二、实验原理:根据霍尔效应,霍尔电势U H =K H IB,保持K H 、I 不变,若霍尔元件在梯度磁场B 中运动,且B 是线性均匀变化的,则霍尔电势U H 也将线性均匀变化,这样就可以进行位移测量。
三、所需单元及部件:霍尔片、磁钢、电桥、差动放大器、F/V 表、直流稳压电源、测微头、振动平台。
四、旋钮初始位置:差动放大器增益旋钮打到最小,电压表置20V 档,直流稳压电源置2V 档。
五、实验步骤:1、了解霍尔传感器结构、熟悉霍尔片电路符号,霍尔片安装在振动圆盘上,两个半圆永久磁钢固定在顶板上,二者组合成霍尔传感器(老);霍尔片封装成探头固定在调节支架上,圆形永久磁钢固定在振动圆盘上(新),两种不同结构的霍尔传感器,请对照设备看下。
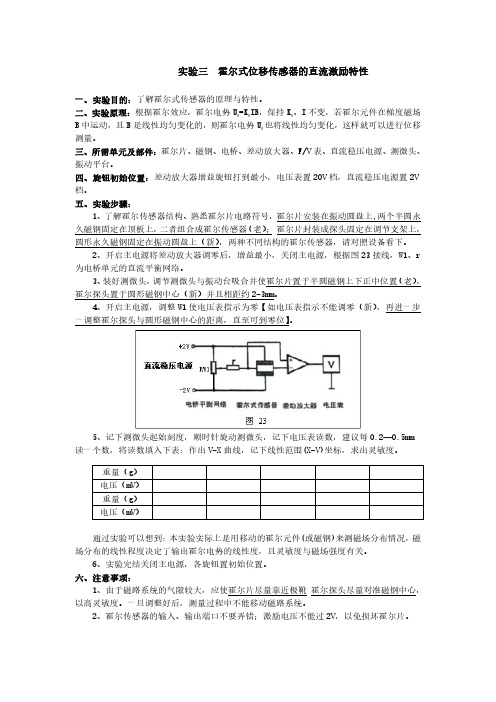
2、开启主电源将差动放大器调零后,增益最小,关闭主电源,根据图23接线,W1、r 为电桥单元的直流平衡网络。
3、装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置(老),霍尔探头置于圆形磁钢中心(新)并且相距约2-3mm。
4、开启主电源,调整W1使电压表指示为零【如电压表指示不能调零(新),再进一步一调整霍尔探头与圆形磁钢中心的距离,直至可到零位】。
5、记下测微头起始刻度,顺时针旋动测微头,记下电压表读数,建议每0.2—0.5mm 读一个数,将读数填入下表:作出V-X 曲线,记下线性范围(X-V)坐标,求出灵敏度。
通过实验可以想到:本实验实际上是用移动的霍尔元件(或磁钢)来测磁场分布情况,磁场分布的线性程度决定了输出霍尔电势的线性度,且灵敏度与磁场强度有关。
6、实验完结关闭主电源,各旋钮置初始位置。
六、注意事项:1、由于磁路系统的气隙较大,应使霍尔片尽量靠近极靴霍尔探头尽量对准磁钢中心,以高灵敏度。
一旦调整好后,测量过程中不能移动磁路系统。
2、霍尔传感器的输入、输出端口不要弄错;激励电压不能过2V,以免损坏霍尔片。
实验三--应变片全桥性能实验
实验三应变片全桥性能实验一、实验目的:了解应变片全桥工作特点及性能。
掌握测量方法。
二、基本原理:应变片基本原理参阅实验一。
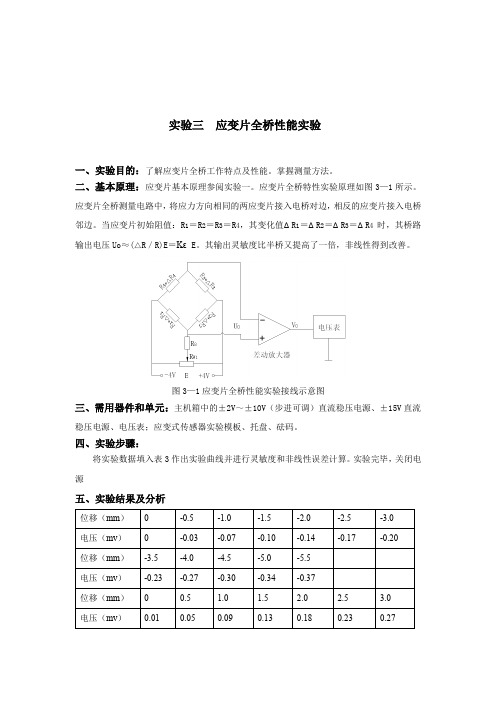
应变片全桥特性实验原理如图3—1所示。
应变片全桥测量电路中,将应力方向相同的两应变片接入电桥对边,相反的应变片接入电桥邻边。
当应变片初始阻值:R1=R2=R3=R4,其变化值ΔR1=ΔR2=ΔR3=ΔR4时,其桥路输出电压Uo≈(△R/R)E=KεE。
其输出灵敏度比半桥又提高了一倍,非线性得到改善。
图3—1应变片全桥性能实验接线示意图三、需用器件和单元:主机箱中的±2V~±10V(步进可调)直流稳压电源、±15V直流稳压电源、电压表;应变式传感器实验模板、托盘、砝码。
四、实验步骤:将实验数据填入表3作出实验曲线并进行灵敏度和非线性误差计算。
实验完毕,关闭电源五、实验结果及分析位移(mm)0 -0.5 -1.0 -1.5 -2.0 -2.5 -3.0电压(mv)0 -0.03 -0.07 -0.10 -0.14 -0.17 -0.20位移(mm)-3.5 -4.0 -4.5 -5.0 -5.5电压(mv)-0.23 -0.27 -0.30 -0.34 -0.37位移(mm)0 0.5 1.0 1.5 2.0 2.5 3.0电压(mv)0.01 0.05 0.09 0.13 0.18 0.23 0.27位移(mm) 3.5 4.0 4.5 5.0 5.5电压(mv)0.32 0.36 0.41 0.46 0.51最小二乘法拟合如图所示由此可知灵敏度为0.07935,经计算最大非线性误差为0.039mv,线性度为7.69%。
六、实验心得实验中应变梁的自由端产生负位移后,重新回到位移原点时,其电压值并不为零,这体现了传感器的迟滞。
迟滞误差在本次拟合中修正了。
实验07(光纤传感器的位移测量及数值误差分析实验)实验报告

实验报告:实验07(光纤传感器的位移测量及数值误差分析实验)实验一:光纤传感器位移特性实验一、实验目的:了解光纤位移传感器的工作原理和性能,测量其静态特性实验数据。
学会对实验测量数据进行误差分析。
二、基本原理:本实验采用的是传光型光纤,它由两束光纤混合后,组成Y 型光纤,半园分布即双D 分布,一束光纤端部与光源相接发射光束,另一束端部与光电转换器相接接收光束。
两光束混合后的端部是工作端亦称探头,它与被测体相距X,由光源发出的光纤传到端部出射后再经被测体反射回来,另一束光纤接收光信号由光电转换器转换成电量,而光电转换器转换的电量大小与间距X 有关,因此可用于测量位移。
三、器件与单元:主机箱、光纤传感器、光纤传感器实验模板、测微头、反射面。
四、实验数据:实验数据记录如下所示:表1光纤位移传感器输出电压与位移数据实验二:随机误差的概率分布与数据处理1.利用Matlab语句(或C语言),计算算术平均值和标准差(用贝塞尔公式)clc; clear;l=[20.42 20.43 20.40 20.43 20.42 20.43 20.39 20.30 20.40 20.43 20.42 20.41 20.39 20.39 20.40];%例2-22数据v0=l-mean(l)%残差列M1=mean(l)%算术平均值M2=std(l)%标准差计算结果数据分布2.利用Matlab语句(或C语言),用残余误差校核法判断测量列是否存在线性和周期性系统误差%残余误差校核法校核线性系统误差N=length(l)%原数组长度if(mod(N,2))%求数组半长K=(N+1)/2elseK=(N)/2endA1=0;delta=0;%delta=A1-A2for i=1:K;%计算前半部分残差和A1=A1+v0(i);endA2=0;for j=K+1:N;%计算后半部分残差和A2=A2+v0(j);endA1;A2;fprintf('Delta校核结果\n');delta=A1-A2%校核结果%阿贝-赫梅特准则校核周期性系统误差u=0for i=1:N-1;u=u+v0(i)*v0(i+1);endu=abs(u)if((u-sqrt(N-1)*M30)>0)fprintf('存在周期性系统误差\n');elsefprintf('未发现周期性系统误差\n');end运行结果可见delta近似于0,由马利克夫准则可知,此案例中应用的残余误差校核法无法确定是否存在系统误差。
电涡流传感器特性与位移测量实验

(操作性实验)班级:学号:学生姓名:实验题目:电涡流传感器特性与位移测量实验一、实验目的1、掌握电涡流传感器的特性和工作原理。
2、掌握电涡流传感器静态特性的标定方法。
二、实验仪器及器件电涡流线圈、金属涡流片、电涡流变换器、测微仪、示波器、电压表。
三、实验内容及原理3.1实验原理电涡流式传感器由平面线圈和金属涡流片组成,当线圈中通以高频交变电流后,与其平行的金属片上产生电涡流,电涡流的大小影响线圈的阻抗Z,而涡流的大小与金属涡流片的电阻率、导磁率、厚度、温度以及与线圈的距离X有关。
当平面线圈、被测体(涡流片)、激励源已确定,并保持环境温度不变,阻抗Z只与X距离有关。
将阻抗变化经涡流变换器变换成电压V输出,则输出电压是距离X的单值函数。
3.2实验内容1、利用所需部件,连接一个利用电涡流位移传感器测量位移的测试系统。
2、掌握实验原理,列出实验步骤。
3、根据实验步骤进行测量。
4、记录测量数据,最少测5组数据。
5、根据数据描出实验曲线。
6、计算实验数据,得出电涡流位移传感器静态特性。
三、实验步骤1.安装好电涡流线圈和金属涡流片,注意两者必须保持平行。
安装好测微头,将电涡流线圈接入涡流变换器输入端。
涡流变换器输出端接电压表20V档。
2.开启仪器电源,用测微仪将电涡流线圈与涡流片分开一定距离,此时输出端有一电压值输出。
用示波器接涡流变换器输入端观察电涡流传感器的高频波形,信号频率约为1MHz。
3.用测微仪带动振动平台使平面线圈完全贴紧金属涡流片,此时涡流变换器输出电压为零。
涡流变换器中的振荡电路停振。
4.旋动测微仪使平面线圈离开金属涡流片,从电压表开始有读数起每位移0.25mm 记录一个读数,并用示波器观察变换器的高频振荡波形。
将V、X数据填入下表四、实验测试数据表格记录表1五、实验数据分析及处理1、非线性度:图一线性方程为y = -1.9757x - 1.5198表2非线性度%88.426.6277.0max 1==∆=FS y e 2、灵敏度-1.975S =∆3、重复性图二%63.026.604.0max ==∆=FS R y e4、迟滞%76.126.611.0e max ==∆=FS t y1正-2正 0 0.01 0.04 0.01 0.02 0.01 0.02 0.02 0.01 -0.01 1正-3正 -0.04 0 0.03 0.01 0.01 0 0.010.010 0 2正-3正-0.04-0.01-0.01-0.01-0.01-0.01 -0.01-0.010.011正-1反 0.09 0.06 0.06 0.08 0.1 0.07 0.07 0.07 0.07 0 2正-2反 0 0.04 0.01 0.07 0.07 0.06 0.05 0.04 0.05 0 3正-3反0.110.050.030.060.090.350.050.040.03六、实验结论与感悟 1、实验结论1实验结论 非线性度%88.426.63055.0max 1==∆=FS y e 灵敏度-1.9757S =∆ 重复性%63.026.604.0max ==∆=FS R y e迟滞%76.126.611.0e max ==∆=FS t y2实验心得在本次实验中,我了解了电涡流传感器的特性及工作原理,掌握了振荡频率与输出电压的关系,掌握了电涡流式传感器的静态标定方法。
位移测量实验报告

一、实验目的1. 熟悉位移测量原理及方法。
2. 掌握常用位移传感器的性能特点及应用。
3. 培养实际操作能力,提高实验技能。
二、实验原理位移测量是指测量物体在空间位置的变化。
根据测量原理,位移测量方法主要分为直接测量法和间接测量法。
直接测量法:直接测量物体在空间位置的变化,如尺测法、光电法等。
间接测量法:通过测量与位移相关的物理量来间接计算位移,如电涡流传感器、霍尔传感器、差动变压器等。
三、实验仪器1. 电涡流传感器2. 霍尔传感器3. 差动变压器4. 数字示波器5. 螺旋测微器6. 计算机7. 数据采集卡四、实验内容1. 电涡流传感器位移特性实验(1)实验目的:了解电涡流传感器的原理与应用,掌握电涡流传感器位移特性的测量方法。
(2)实验步骤:①将电涡流传感器固定在实验平台上,调整传感器与被测物体之间的距离。
②使用数字示波器观察传感器输出信号的波形。
③通过调整传感器与被测物体之间的距离,记录不同距离下的输出信号波形。
④分析电涡流传感器位移特性曲线。
2. 霍尔传感器位移特性实验(1)实验目的:了解霍尔传感器的原理与应用,掌握霍尔传感器位移特性的测量方法。
(2)实验步骤:①将霍尔传感器固定在实验平台上,调整传感器与被测物体之间的距离。
②使用数字示波器观察传感器输出信号的波形。
③通过调整传感器与被测物体之间的距离,记录不同距离下的输出信号波形。
④分析霍尔传感器位移特性曲线。
3. 差动变压器位移特性实验(1)实验目的:了解差动变压器的原理与应用,掌握差动变压器位移特性的测量方法。
(2)实验步骤:①将差动变压器固定在实验平台上,调整传感器与被测物体之间的距离。
②使用数字示波器观察传感器输出信号的波形。
③通过调整传感器与被测物体之间的距离,记录不同距离下的输出信号波形。
④分析差动变压器位移特性曲线。
五、实验结果与分析1. 电涡流传感器位移特性曲线:随着传感器与被测物体之间距离的增加,输出信号逐渐减小,呈线性关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.光栅式位移测量
光栅是一种数字式位移检测元件,其结构原理简单,测量范围大 而且精度高,广泛应用于精度机床和仪器的精密定位或长度、速度、 加速度、振动等方面的测量。 用于位移测量的透射计量光栅是一种在玻璃基体上刻制有均匀 分布的透光和不透光条纹的光学元件, 刻制的光栅条纹密度一般为没 毫米 25、50、100、250 条等。 光栅位移传感器由光源、光路系统、光栅副(标尺光栅+指示光 栅)和光敏元件组成,其结构如图 3-3 所示。
五、实验步骤
1、将光栅位移传测量装置与显示装置连接好; 2、使用仪器设备清零; 3、将量块放置在测量装置上,进行测量,长宽高分别测量十次并进 行记录; 4、将电感测微仪与显示装置连接好; 5、使用仪器设备清零; 6、对薄片进行测量,重复测量十次并进行记录; 7、整理处理数据。
六、数据记录处理与分析
1、数据记录 对小量块的长宽高分别进行测量,测量结果记录如表 3-1。 长(mm) 宽(mm) 高(mm) 100.098 7.026 4.100 100.182 7.032 4.101 100.058 7.066 4.105 数值 99.959 7.028 4.105 100.091 6.982 4.088 99.973 7.028 4.120
七、思考题
1.光栅,电感位移测量装置有何特点?
答: 1.光栅位移测量装置特点: (1) 主要优点: 测量量程范围大 (可 达数米)且同时具有高分辨力(可达 0.01μm)和高精度;可实现动 态测量;输出数字量,易于实现数字化测量和自动控制;具有较强的 抗干扰能力; (2) 主要缺点: 对使用环境要求较高, 怕振动, 怕油污、 灰尘等的污染;制作成本高。 2.电感位移测量装置特点: (1)主要优点:线性度好,测量范围 较大,但灵敏度较低; (2)主要缺点:有漏感,没测时仍有一定的自 感量。
U 为 光 栅 位 移 量 x 的 正 弦 函 数 , 即 : U=U0+Um sin(2 π x/W) (3-2) 式中 U0—输出信号中的直流分量;Um—输出信号中正弦交流分 量的幅值;x—两光栅间的相对位移 将该电压信号放大、整形为方波,再由微分电路转换成脉冲信号,送 计数器计数, 就可得出位移量的大小, 位移量为脉冲数与栅距的乘积, 测量分辨力为光栅栅距 W。
U2 2M R12 ( L1 ) 2 U1
(3-1)
上式表明,当激励电压的幅值 U1 和角频率 、一次线圈的等效电 阻 R1 及电感 L1 为定值时,差动变压器输出电压的幅值 U2 与互感的变 化量 M 成正比,而且在衔铁上移或下移量相等时,输出电压幅值相 同,但相位差 180°。差动变压器的输出特性曲线如图 3-2 所示。
图 3-1 差动变压器结构与等效电路
1-导磁外壳 2-绝缘骨架 3-二次线圈 a 4-活动衔铁 5-一次线圈 -二 测线圈 b 7-工件 在忽略了涡流损耗, 磁滞损耗和线圈间寄生电容影响的理想情况 下,螺管式差动变压器的等效电路如图 3-1(b)所示。图中 U1 为一 次线圈激励电压,M1,M2 分别为一次线圈与两个二次线圈的电感和等 效电阻,RL 为负载电阻,E21、E22 为两个二次线圈的感应电动势,U2 为电路输出电压。 由于两个二次线圈反极性串联,其差动输出为 U2 = E21 - E22。当 衔铁处于中间位置时,因线圈互感 M1,M2 相同,二次线圈感应电动势 E21、E22 也相同,所以差动输出为零。 等衔铁有偏移时, 互感 M1≠M2, 因而二次线圈感应电动势 E21≠E22, 这是电路输出电压 U2 不为零。在量程范围内,衔铁位移越大,差动输 出电动势就越大。衔铁位移方向不同时,差动输出电动势也反相。因 此差动变压器输出电动势的大小和相位可以反应衔铁位移量的大小 和方向,输出电压的有效值为:
图 3-3 光栅位移传感器组成结构 1-标尺光栅 2-指示光栅 3-光敏元件 4-光源 光栅传感器的光源通常采用钨丝灯泡或半导体发光器件, 光敏元 件有光电池和光电二极管等。在光敏元件输出端,接有放大器,以得 到足够大的输出信号防止干扰的影响。 光栅副有标尺光栅和指示光栅组成, 两者栅距完全相同, 标尺光 栅的有效长度即为测量范围, 指示光栅比标尺光栅短得多。两光栅互 相重叠,担保持有 0.05~0.1 mm 的间隙,可以相对运动。使用时标尺 光栅固定,而指示光栅则安装在被测物体上随之移动。 当被测物体运动时, 光源发出的光透过光栅缝隙形成的光脉冲被 光敏元件接收并计数, 即可实现位移测量,被测物体位移=栅距×脉 冲数。 用光敏元件接收莫尔条纹移动时光强的变化并转换为电信号输 出。光敏元件接收的光强变化近似于正弦波,其输出电压信号的幅值
四、实验原理 1.电感测微仪
差动变压器是一种互感式位移传感器,本身相当于一个互感系数 可变的变压器。工作时,一次线圈接入激励电源,两个二次线圈反向 串联,以差动方式输出感应电动势。 由于被测位移的变化会影响线圈 间的互感,输出感应电动势就会有相应的变化。 差动变压器的结构上也有变气隙式和变面积式, 但采用较多的是 螺管式。图 3-1(a)为螺管式差动变压器结构示意图。
100.087 99.933 100.070 99.848 均值 标准差 平均值的标准 差 100.0299 0.0988 0.0313
7.036 6.999 7.044 7.061 7.0302 0.0253 0.0080
4.048 4.075 4.030 4.054 4.0826 0.0297学习和掌握位移测量方法 2、学习使用典型测量位移装置
二、实验内容
1、使用光栅位移传感器测量大位移 2、使用电感测微仪测量小位移
三、实验设备
1、DS-DRO 2M 光栅位移测量装置 2、MOS 系列 LVOT ,MDSL-0500M6-1A 电感测微仪 3、支架 4、量块
图 3-2 差动变压器的输出特性曲线 图中 U2 为差动输出电动势,x 表示衔铁偏离中心位置的距离。图 中 U0 为零点残余电压, 这是由于工艺上的原因, 差动变压器二次绕组
不可能完全对称,当位移 x 为零时,输出电动势不等于零,该不为零 的输出电动势称为零点残余电压。 零点残余电压会使传感器输出特性 在零点附近的范围内不灵敏,限制者分辨力的提高,使线性度变坏, 需要采取一定措施加以补偿以减小或消除其影响。
表 3-1 实验三小量块数据记录 对长量块进行测量,数据记录如表 3-2 所示。 第一次 第二次 第三次 第四次 第五次 均值 平均值 的标准 348.147 348.023 347.931 347.896 348.043 348.041 差 第六次 第七次 第八次 第九次 第十次 标准差 0.0403 347.885 347.939 348.245 348.180 348.116 0.127 表 3-2 实验三长量块数据记录 对薄片进行测量,数据记录如表 3-3 所示。 第一次 第二次 第三次 第四次 第五次 均值 平均值 的标准 78.19 78.02 78.71 79.02 78.42 78.39 差 第六次 第七次 第八次 第九次 第十次 标准差 0.66 79.50 77.93 78.10 79.01 77.04 0.70 表 3-3 实验三薄片数据记录 2、数据分析 对测量数据求取均值, 标准差以及平均值的标准差,对于 A 类不 确定度,其值就是其平均值的标准差。 对于小量块,可以得到其测量值:长 L=(100.0299 ±0.0313 ) mm;宽 D=(7.0302 ±0.0080)mm;高 H=(4.0826±0.0094 )mm。 对于长量块,可以得到测量值:L=(348.041 ±0.0403 )mm。 对于薄片,可以得到测量值:D=(78.39±0.70)μm。