分程及阀位控制系统(课堂PPT)
SAMSON-3730-2、4调节阀定位器基本操作ppt课件
初始化后,在MAX、NOM 或MAN 模式下成功初始化后,定位器
将处于自动操作模式。
17
• 切换至手动操作模式
在代码0 上,按下旋钮按钮,出现AUtO 显示,代码0 闪烁。转动
旋钮按钮至显示屏上出现MAN。按下旋钮按钮切换至手动操作模式。
自动/手动切换是平滑无扰动的,切换后的手动操作操作点是自动操作
许,应该选择其它的初始化模式。
SUB 初始化模式用于在生产过程进行中更换阀门定位器。为此,可
用机械方法将控制阀固定某个确定的阀位,或借助气动方式,即使用外接
气动信号使控制阀动作到某一个确定阀位。此固定住的阀位能够确保生产
装置能够正常运行。
更换上的阀门定位器不要初始化,如果需要,使用代码36 对定位器
模式下最后时刻的给定值。此时阀位以%显示。
18
• 调整手动给定值
转动旋钮按钮至显示屏出现代码1。按一下旋钮按钮确定设置,
代码1 闪烁。当代码1 闪烁时,可通过转动旋钮按键将控制阀移动至需
要位置。继续转动直到阀门定位器输出压力变化和控制阀门开始反应。
若两分钟内未激活旋钮按键,则定位器将自动返回至手动模式下的代
3.1)上的横槽里。相应地调节反馈杆(1)。用两个固定螺钉将定位器拧紧
在弯板上。
7
• 装配到角行程执行器
8
1、将安装夹具(3)安装在有槽的执行器轴上或者适配器(5)上。
2、将连接轮(4)平面侧,面向执行器安装在连接夹具(3)上。参照图9 进
行调整,使在阀门关闭时的槽口位置与旋转方向相对应。
部,使阀门定位器能够运行的最小允许输入控制信号电流不能低于
3.8mADC。
第五章5 分程控制控制系统
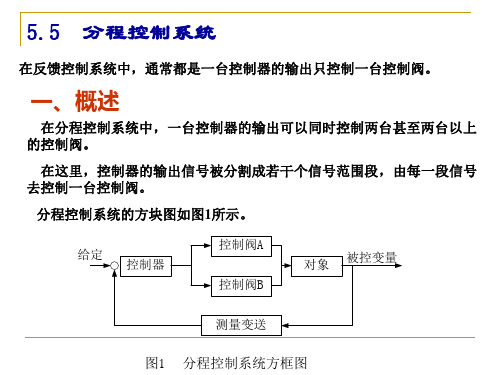
图1
分程控制系统方框图
分程控制系统中控制器输出信号的分段一般是由附设在控制阀上的阀门定
位器来实现的。阀门定位器相当于一台可变放大系数,且零点可以调整的放
大器。 阀门定位器可以将控制器的输出压力分成几段信号区间。不同段内的压力
有相应的阀门定位器转化为0.02~0.1MPa信号压力,使控制阀全程动作。
例如:A和B两个控制阀 要求:A阀在控制器输出信号压力为0.02~0.06MPa信号压力,使控制 阀全程动作。 A阀上的阀门定位器对应的输出压力为0.02MPa~0.1MPa,B阀上则在控制 器输出压力为0.06MPa~0.1MPa时通过附设在上面的阀门定位器使之也刚好走 完全程。 即,当控制其输出信号小于0.06MPa时,A阀动作,B阀不动作; 当信号大于0.06MPa时,A阀已动至极限,B阀开始动作。
一类是两个控制阀异向动作: 即随着控制器输出信号的增大成减小,一个控制阀开大,另 一个控制阀则关小,如图8—37所示,其中图(a)是A为气关阀、B 为气开阀的情况。图(b)是A为气开阀、B为气关阀的情况。
分程阀同向或异向动作的选择问题,要根据生产工艺的实际需要 来确定。
二、分程控制的应用场合
1.用于扩大控制阀的可调范围,改善控制品质
TCபைடு நூலகம்冷水
A B 蒸汽
FVA:气闭
FVB:气开
TC:反作用
1.反应开始前升温阶段→T测<给定值→TC↑→A阀↓ →( A阀 全关时)B阀↑ →蒸汽加热, T↑→ 达到反应温度时,反应开 始; 2.反应开始后T↑ → T测.>给定值→TC↓ →B阀↓(B阀全关时) A阀↑→ T↓,冷却水把反应热带走,使反应釜温度恒定,反 应继续进行。
5.5
分程控制系统
9.分程控制-过程控制(自动化)解析

本讲主要内容
分程控制的特点与适用场合; 分程区间的确定方法; 阀位控制的概念与设计方法。
例1:间歇聚合反应器的控制问题
T
Y
冷水
“A”
蒸汽
“B”
控制要求:反应开始前,需要用蒸汽加热以达到反应所需 的温度;当反应开始后,因放出大量反应热,需要用冷水 进行冷却。要求全过程自动控制反应器的温度,怎么实现?
氮封的技术要求
实行氮封的技术要求是:要始终保持储罐内的 氮气压微量正压。储罐内储存物料量增减时, 将引起罐顶压力的升降,应及时进行控制,否 则将使储罐变形,更有甚者,会将储罐吸扁。 因此,当储罐内液面上升时,应停止继续补充 氮气,并将压缩的氮气适量排出。反之,当液 面下降时应停止放出氮气。只有这样才能达到 既隔绝空气,又保证容器不变形的目的。
多回路PID控制系统小结
用于改善控制系统性能的多回路PID系统 (1)串级控制系统; (2)前馈控制系统; (3)变增益/变比值控制系统。
用于满足工艺特定需要的多回路PID系统 (1)均匀控制系统; (2)比值控制系统; (3)分程控制系统; (4)阀位控制系统; (5)选择性控制系统。
练习
题1 下图为化学反应器的过程控制系统:1)说明图中的控制策略属于哪类控制系统?2) 最主要的被控变量是什么?最主要的操纵变量是什么?3)图中哪个控制器要整定的最慢, 哪个控制器要整定的最快?为什么?4)阀门V1是气开还是气关?为什么?V2是气开还是 气关?为什么?5)指出各图中控制器的正反作用,并给出选取的理由;6)给出图中控制 规律的选取。
0.10
调节阀气动信号(MPa)
避免两调节阀频繁开 闭的方法: (1)控制阀引入不 灵敏区。 (2)同时,控制器 引入调节死区(为什 么?)
阀门定位器学习.pptx

软件总体设计
▪自整定状态 (Initial) ▪设置状态 (Config) ▪运行控制状态(Run)
第26页/共34页
▪ 自整定状态(Initial)
在自整定状态中,定位器通过一系列的自整定过程测定执行机构的各种 特性参数,为运行控制做好准备。
自整定过程主要包括: • 检测定位器安装状况; • 检测执行机构的零位和满度; • 检测进/放气过程执行机构运行速度; • 测量进/放气方向上基本脉宽; • 检测进/放气方向上执行机构动态特性;
第23页/共34页
▪ 运行状态
三位式 P I 自适应调节控制 比例控制 当出现偏差阶跃信号,进行快速比例控制 积分控制 积分系数根据偏差的大小进行适当的微调
第24页/共34页
▪ 自动调整
调节中记录震荡情况和控制的速度, 进行自动的脉宽调整
采取措施后,控制基本无超调, 动作到位快。
第25页/共34页
第27页/共34页
▪ 设置状态(Config)
在设置状态下,用户可以对执行机构特性、阀门特性和定位器控制三大 类参数进行设置。
通过对执行机构和阀门特性的很少一些必要参数的设置,确保定位器 正常运行。
而通过对定位器控制参数的设置,用户可以实现诸如:限位、分程控 制、安全模式等多种控制、显示功能。
第28页/共34页
第15页/共34页
与智能型喷嘴挡板式阀门定位器的比
较
▪喷嘴挡板式
▪压电阀式
可动件多,受温度和振动影 响大
稳定状态下,依然需要供给 连续的压缩空气
……
可动件少,几乎不受温 度和振动的影响
稳定状态下,气体能耗 忽略不计
……
第16页/共34页
设计难点
▪ 低功耗
第四章-液压阀ppt课件
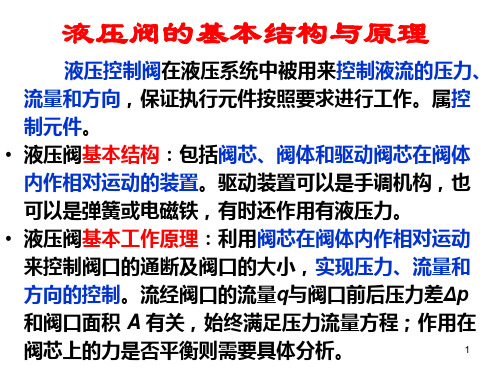
▪ 额定压力
阀长期工作所允许的最高压力。对压力 控制阀,实际最高压力有时还与阀的调压范 围有关;对换向阀,实际最高压力还可能受 它的功率极限的限制。
等组成。p 口压力油除通过右阀座孔作用在球阀的右边外, 还经过阀体上的通道 b 进入操纵杆的空腔并作用在球阀的 左边,球阀所受轴向液压力平衡。
• 特点 对油液污染不敏感,换向性能好;密封性能好,
最高压力可达63MPa;电磁吸力经杠杆放大后传给阀芯,
推力大;使用介质的粘度范围大,可直接使用高水基、
乳化液;加工装配工艺难度较大,成本较高。
2
– 锥阀 锥阀阀芯半锥角一般为12 °~20 °,阀口 关闭时为线密封,密封性能好且动作灵敏。阀口 的压力流量方程 q= Cdπd x sinα(2Δp/ρ)1/2
3
– 球阀 性能与锥阀相同,阀口的压力流量方程 q = Cdπd h 0 (x/R) (2Δp/ρ)1/2
4
根据用途不同分类
– 压力控制阀 用来控制和调节液压系统液流压力的阀类,如溢流阀、 减压阀、顺序阀等。
• 压力损失:包括阀口压力损失和流道压力损失。 换向阀的压力损失除与通流量有关,还与阀的机 能、阀口流动方向有关,一般不超过1MPa。
38
• 内泄漏量:滑阀式换向阀为环形间隙密封,工作 压力越高, 内泄漏越大。泄漏不仅带来功率损 失,而且引起油液发热。因此阀芯与阀体要同心, 并要有足够的封油长度。
• 应用:主要用在超高压小流量液压系统或作插装阀的先
导阀。
41
压力控制阀
项目一水位控制系统设计PPT课件
2、什么是实时数据报表?什么是历史数据报 表• 实?时数据报表是实时的将当前时间的数据变量按一定报告格式
(用户组态)显示和打印,即:对瞬时量的反映,实时数据报 表可以通过MCGS系统的实时表格构件来组态显示实时数据报 表。 • 历史数据报表是从历史数据库中提取数据记录,以一定的格式 显示历史数据。实现历史报表由两种方式,一种用策略中的 “存盘数据浏览”构件,另一种利用历史表格构件
液位组
类型 开关型 开关型 开关型 数值型 数值型 数值型 数值型 数值型 数值型 组对象
注释 控制水泵“启动”、“停止”的变量 控制调节阀“打开”、“关闭”的变量 控制出水阀“打开”、“关闭”的变量 水罐1的水位高度,用来控制1#水罐水位的变化 水罐2的水位高度,用来控制2#水罐水位的变化 用来在运行环境下设定水罐1的上限报警值 用来在运行环境下设定水罐1的下限报警值 用来在运行环境下设定水罐2的上限报警值 用来在运行环境下设定水罐2的下限报警值 用于历史数据、历史曲线、报表输出等功能构件
第16页/共34页
练习
• (一)理论题 • 为什么说实时数据库是MCGS系统的核心? • 2.一个应用系统由哪五个部分组成? • (二) 实践题 • 1.参考图1-17完成水位控制系统的画面制作,实现动画控制效果测试。
第17页/共34页
模块3 模拟设备连接
• 教学目标 • 终极目标:能实现动画自动运行 • 促成目标: • 掌握模拟设备使用方法; • 掌握策略工具箱使用方法,能编写脚本程序; • 掌握系统报警方法。 • 二、工作任务 • 能实现动画水位控制系统自动运行。
曲线的制作。
第28页/共34页
模块5 nTouch嵌入式系统设计
•
教学目标
阀门定位器
定位器(valve positioner)阀门定位器按结构分:气动阀门定位器、电气阀门定位器及智能阀门定位器,是调节阀的主要附件,通常与气动调节阀配套使用,它接受调节器的输出信号,然后以它的输出信号去控制气动调节阀,当调节阀动作后,阀杆的位移又通过机械装置反馈到阀门定位器,阀位状况通过电信号传给上位系统。
(一)结构阀门定位器按其结构形式和工作原理可以分成气动阀门定位器、电-气阀门定位器和智能式阀门定位器。
阀门定位器能够增大调节阀的输出功率,减少调节信号的传递滞后的情况发生,加快阀杆的移动速度,能够提高阀门的线性度,克服阀杆的摩擦力并消除不平衡力的影响,从而保证调节阀的正确定位。
(二)定位器分类1、阀门定位器按输入信号分为气动阀门定位器、电气阀门定位器和智能阀门定位器。
(1)气动阀门定位器的输入信号是标准气信号,例如,20~100kPa 气信号,其输出信号也是标准的气信号。
(2)电气阀门定位器的输入信号是标准电流或电压信号,例如,4~20mA电流信号或1~5V电压信号等,在电气阀门定位器内部将电信号转换为电磁力,然后输出气信号到拨动控制阀。
(3)智能电气阀门定位器它将控制室输出的电流信号转换成驱动调节阀的气信号,根据调节阀工作时阀杆摩擦力,抵消介质压力波动而产生的不平衡力,使阀门开度对应于控制室输出的电流信号。
并且可以进行智能组态设置相应的参数,达到改善控制阀性能的目的。
2、按动作的方向可分为单向阀门定位器和双向阀门定位器。
单向阀门定位器用于活塞式执行机构时,阀门定位器只有一个方向起作用,双向阀门定位器作用在活塞式执行机构气缸的两侧,在两个方向起作用。
3、按阀门定位器输出和输入信号的增益符号分为正作用阀门定位器和反作用阀门定位器。
正作用阀门定位器的输入信号增加时,输出信号也增加,因此,增益为正。
反作用阀门定位器的输入信号增加时,输出信号减小,因此,增益为负。
4、按阀门定位器输入信号是模拟信号或数字信号,可分为普通阀门定位器和现场总线电气阀门定位器。
分程及阀位控制系统
第7章
分程及阀位控制系统
7、1 分程控制系统 7、2 阀位控制系统
7、分1 程控制系统 7、1、概述 1一个控制器控制几个控制阀——输出信号分段“分程控制”
如,控制两个阀A、B A阀控制信号:0、02~0、06Mpa B阀控制信号:0、06~0、1Mpa
控制器输出在0、06Mpa以下,只有阀A动作,在0、06Mpa 以上,只有阀B动作
R=Cmax/Cmin Cmin=Cmax/30=3、33 当采用两只控制阀组成分程控制时,最小流通能力不变,而最 大流通能力应就是两阀都全开时得流通能力,即:
C' max=CAmax十CBmax=2Cmax=200
因此A、B两只控制阀构成分程控制时,两阀组合后得可调范围
应就是:
R'
C' max
200
60
Cmin 100
R’=60
30
7、1、分程控制得应用场合 2
(2)同时控制两种介质,满足工艺要求
— TC
A
A、
C
B
A、 O
A B
图7—4 间歇式化学反应器分程控制系统
7、1、分程控制得应用场合 2
(2)同时控制两种介质,满足工艺要求
工艺要求:投料后,需由蒸汽加温,以达到反应温度,反应进 行后,放出热量,需要将热量移走。例1 线性阀d来自F FmaxK
dl
F/Fmax=Kl十Kl
4
(1)连续分程法:
例2 等百分比阀
d
F Fmax dl
K
F Fmax
缺点:如果两个阀得流通能力相差很大时,会有一个阀得 分程信号变得非常小,调节困难。
7、1、分程阀流量特性问题 4
分程控制系统
阀开度
0
50 %
100 %
异向组合:
100 %
阀开度
调节器输出
调节器输出
100 %
0
50 %
100 %
阀开度
0
50 %
100 %
调节器输出
调节器输出
二. 分程控制系统的应用 ⒈ 扩大可调范围。 例如: 两阀的可调范围为: A
RA=RB 30
TC
蒸汽 热水
TT
热物料
B
冷凝水
最大流通能力为:
CAmax=4, CBmax 100
零点和放大倍数可调的放大器。
Gm s
4~20 mA
阀开度
阀门定位器2.5 A,B分程及阀位控制系统 分段响应调节器输出信号,将它们转换为调节 ( 十六 ) 阀全程信号。 2.5.1 分程控制系统 TC TT 工作过程:设分段点为 50%。均选气开阀。则 热物料 调节器输出信号在 0 ~ 50%(4 ~ 12mA)时,阀门定位器A将 一 . 概述 4~12mA的信号转换为 0.02 ~ 0.1 MPa蒸汽 ,对应阀A全行程。 B B 全关。 一个调节器的输出分 此时阀门定位器 B 输出 0.02 MPa ,阀 热水 调节器输出信号在 50 ~ 100 %( 12 ~ 20mA)时,阀门定位器A 段分别控制两个或两 A 输出 0.1 MPa ,阀A全开。此时阀门定位器 B 将12~ 20mA 冷凝水 的信号转换为 0.02 ~ 0.1 MPa ,对应阀B 全行程。 个以上的调节阀,两 相当于阀门定位器A量程放大一倍。 个调节阀分量程响应调节器的输出信号。 阀门定位器B零点迁移 50%,且量程放大一倍。 冷物料 调节阀A 100 % y x 关键是每个调节阀上都装有阀 GO s 调节器 门定位器,阀门定位器相当于 调节阀B
分程控制系统
如果在分程控制系统中采用两台分程阀,如图1-1 所示,要求A阀的信号区间为4~12ma,B阀的信号 区间为12~20ma。通过调整两台调节阀上的阀门 定位器,使A阀在4~12ma的输入信号下走完全行 程,使B阀在12~20ma的输入信号下走完全行程。 当控制器输出信号小于12ma时,只有A阀随信号 的变化改变开度,B阀的开度不变;控制器输出信 号超过12ma时,A阀的开度不变,B阀的开度随信 号的变化而变化。
图(b)表示两个调节阀均为气关阀。随着控制器输出 信号为4~12ma范围时,A阀从全开到全关,B阀为 全开;信号为12~20ma时,A阀保持全关,B阀从 全开逐渐打开到全关。
图1-3为异向调节阀的分程动作过程,即随着控制 器输出信号的增大或减小调节阀开大,另一个调节 阀则关小。
分程控制系统的应用 分程控制系统主要有以下几个方面的应用 (1)用于扩大调节阀的可调范围,满足不同负荷下 的控制要求。当生产负荷变化较大时,要求有较大范 围的流量变化,但是调节阀的可调范围是有限制的, 只用一个调节阀满足不了流量大范围变化的要求,这 时可采用两个调节阀并联安装的分程控制方案.
分程控制中的几个问题 (1)分程控制对阀门的泄漏等级要求较高,当分程 控制的目的是为了扩大调节阀的可调范围、提高系 统控制质量时尤为重要。当大小两个阀门并联工作 时,如果大阀的泄漏量较大时,小阀在小开度时将 起不到控制作用。
(2)要正确选择调节阀流量特性。在分程控制系统中, 存在着控制作用从一个调节阀向另一个调节阀的过 渡。如果各阀的流通能力相差较大,那么在分程点 处将出现流量的突变这在大小调节阀并联时尤其突 出。解决的办法是:如果要求分程控制的总体流量 特性为直线,且总的可调范围不太大,可使用两个 流通能力相同的线性阀门;如果要求总的可调范围 较大,则可使用两个等百分比的阀门。