超前进位加法器的设计分解
超前进位加法器的设计原理_概述及解释说明
超前进位加法器的设计原理概述及解释说明1. 引言1.1 概述超前进位加法器是一种用于在数字电路中进行二进制数的加法运算的特殊电路。
相较于传统的二进制加法器,超前进位加法器通过预先计算进位,从而实现更快速的运算。
本文旨在对超前进位加法器的设计原理进行概述和解释说明。
1.2 文章结构本文分为五个主要部分,分别是引言、超前进位加法器的设计原理、实现步骤和流程、优势与应用范围以及结论。
首先介绍引言部分,接下来详细解释超前进位加法器的设计原理,然后说明实现步骤和流程。
之后介绍该加法器的优势及其应用范围,并最后得出结论。
1.3 目的本文旨在向读者阐明超前进位加法器的设计原理并提供相关解释说明。
对于数字电路领域的研究者和工程师而言,了解超前进位加法器背后的原理可以帮助他们更好地应用这一技术,并且展示其在优势与应用范围方面所具备的潜力。
2. 超前进位加法器的设计原理2.1 超前进位加法器的定义和背景超前进位加法器是一种常用于数字电路中的加法器,用来实现两个二进制数的相加操作。
与传统的普通进位加法器不同,超前进位加法器在进行计算时能够提前计算并预测进位信号,从而减少计算时间并提高加法运算速度。
2.2 原理解释超前进位加法器采用了两级运算的方式,利用了先行进位预测的思想,以优化传统加法器的运算效率。
其基本原理如下:- 首先,对于每一位(bit)进行相应位置的逻辑门电路设计。
- 然后,在相邻位之间引入前导输入(Generate input)和进位输出(Carry output),这样可以使得下一级可以预测到当前级别产生的所有可能进位。
- 通过与门、或门和异或门等逻辑门之间巧妙的组合连接,实现了高速、低功耗的超前进位运算。
超前进位加法器主要依靠已知最高有效输入块(G代表Generate, P代表Propagate, C代表Carry In) 确定其对应输出(S代表Sum, C代表Carry Out),并将这些信息传递给下一级加法器。
超前进位加法器设计(参考资料)
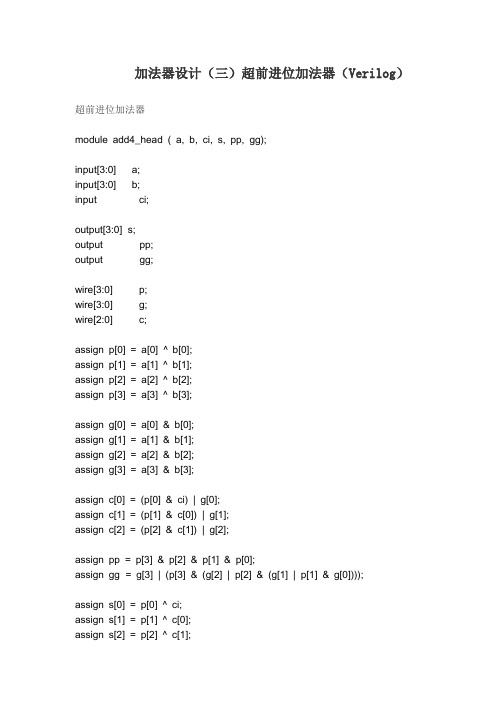
加法器设计(三)超前进位加法器(Verilog)超前进位加法器module add4_head ( a, b, ci, s, pp, gg);input[3:0] a;input[3:0] b;input ci;output[3:0] s;output pp;output gg;wire[3:0] p;wire[3:0] g;wire[2:0] c;assign p[0] = a[0] ^ b[0];assign p[1] = a[1] ^ b[1];assign p[2] = a[2] ^ b[2];assign p[3] = a[3] ^ b[3];assign g[0] = a[0] & b[0];assign g[1] = a[1] & b[1];assign g[2] = a[2] & b[2];assign g[3] = a[3] & b[3];assign c[0] = (p[0] & ci) | g[0];assign c[1] = (p[1] & c[0]) | g[1];assign c[2] = (p[2] & c[1]) | g[2];assign pp = p[3] & p[2] & p[1] & p[0];assign gg = g[3] | (p[3] & (g[2] | p[2] & (g[1] | p[1] & g[0])));assign s[0] = p[0] ^ ci;assign s[1] = p[1] ^ c[0];assign s[2] = p[2] ^ c[1];assign s[3] = p[3] ^ c[2];endmodule首先要明确几个概念:p表示进位否决信号(pass),如果p为0就否决调前一级的进位输入。
否决的意思就是即使前一级有进位,本级也不会向后一级产生进位输出。
设计一个 4 位超前进位加法器(数字逻辑课设)
c[2]=(p[2]&p[1]&p[0]&ci)|(p[2]&p[1]&g[0])|(p[2]&g[1])|g[2],
c[3]=(p[3]&p[2]&p[1]&p[0]&ci)|(p[3]&p[2]&p[1]&g[0])|(p[3]&p[2]&g[1])|(p[3]&g[2])|g[3];
代码如下: add.v
`timescale 1ns/1ps
module add(input [3:0]a,input [3:0]b,input ci,output [3:0]s,output co); //定义所需变量
wire [3:0] p, g; //进位传递函数p,进位产生函数g
wire [3:0] c; //进位函数
设计要求:在这个设计中,你需要使用 Verilog 代码设计一个 4 位的超前进位加法器。这个 4 位超前进位加法器可以完成对两个 4 位二进制数的相加。完成设计后,你还需要设计测试程序(test bench)来验证你的设计。你的测试程序需要考虑到所有可能的输入情况。
设计思路:
因为各进位的产生依赖于低位的进位,所以运算速度较慢。为了提高速度,必须设法使较低位的进位信号越过中间各级直接决定较高位的进位输出,设计Ai和Bi分别表示第i位的被加数和加 数,Ci-1为来自第i-1位全加器的进位,令Pi=Ai^Bi,Gi=Ai&Bi函数表达式为:
Co=PoCo+Go
C1=P1Co+G1
C2=p2C1+G2
4bits超前进位加法器全定制设计实验报告
TPLH
Propagation Delay Time
A1~A4,B1~B4到C4
3
ns
TPHL
3
tT
2.5
tP
2.5
Av Power
4
Layout Area
150*180
2.5真值表
2.6逻辑图
工艺的主要参数(smic18工艺)
参数
参数定义
PMOS数值
NMOS数值
U0
迁移率
8.661m
34m
Vth
-0.4
mA
IOL
Low Level OutputVoltage
8
mA
2.3直流特性
Symbol
Parameter
Test Condition
Value
Units
TA=25°C
Min
Typ
Max
VOH
High Level OutputVoltage
VCC=Min,IOH=Max
VIL=Max,VIH=Min
mA
C0
-0.4
II
InputCurrent @ Max Input Voltage
VCC=Max
VI=7.2V
A,B
0.2
mA
C0
0.1
ICC
Supply Current
VCC=Maxl
Parameter
From (Input )to (Ouput)
Test Condition
(2)点选LM视窗上面的工具列File→New→Library;
(3)会产生New Library画面;
(4)在框内填入库名;
16位超前进位加法器实验报告
实验名称:十六位超前进位加法器一、实验目的设计、验证并优化16位超前进位加法器的逻辑功能。
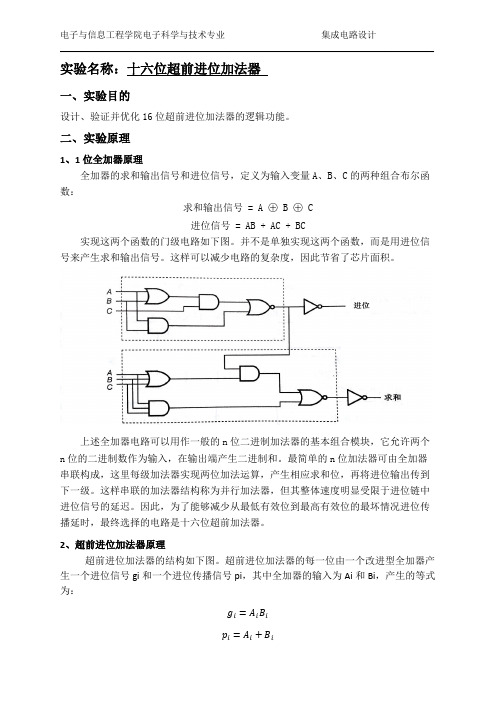
二、实验原理1、1位全加器原理全加器的求和输出信号和进位信号,定义为输入变量A、B、C的两种组合布尔函数:求和输出信号 = A ⊕ B ⊕ C进位信号 = AB + AC + BC实现这两个函数的门级电路如下图。
并不是单独实现这两个函数,而是用进位信号来产生求和输出信号。
这样可以减少电路的复杂度,因此节省了芯片面积。
上述全加器电路可以用作一般的n位二进制加法器的基本组合模块,它允许两个n 位的二进制数作为输入,在输出端产生二进制和。
最简单的n位加法器可由全加器串联构成,这里每级加法器实现两位加法运算,产生相应求和位,再将进位输出传到下一级。
这样串联的加法器结构称为并行加法器,但其整体速度明显受限于进位链中进位信号的延迟。
因此,为了能够减少从最低有效位到最高有效位的最坏情况进位传播延时,最终选择的电路是十六位超前加法器。
2、超前进位加法器原理超前进位加法器的结构如下图。
超前进位加法器的每一位由一个改进型全加器产生一个进位信号gi和一个进位传播信号pi,其中全加器的输入为Ai和Bi,产生的等式为:改进的全加器的进位输出可由一个进位信号和一个进位传输信号计算得出,因此进位信号可改写为:式中可以看出,当gi = 1(Ai = Bi = 1)时,产生进位;当pi = 1(Ai =1或Bi = 1)时,传输进位输入,这两种情况都使得进位输出是1。
近似可以得到i+2和i+3级的进位输出如下:下图为一个四位超前进位加法器的结构图。
信号经过pi和gi产生一级时延,经过计算C产生一级时延,则A,B输入一旦产生,首先经过两级时延算出第1轮进位值C’不过这个值是不正确的。
C’再次送入加法器,进行第2轮2级时延的计算,算出第2轮进位值C,这一次是正确的进位值。
这里的4个4位超前进位加法器仍是串行的,所以一次计算经过4级加法器,一级加法器有2级时延,因此1次计算一共经过8级时延,相比串行加法器里的16级时延,速度提高很多。
试验二 超前进位加法器 设计
试验二超前进位加法器设计练习2. 4位超前进位加法器行波进位加法器延时较长,可采用超前进位加法器减少延时,但是由此会造成电路的复杂。
超前进位加法器原理参见《数字集成电路》(周润德第二版)424页。
对以上公式的注解:公式中的C O,K 表示第K 为的进位输出,G K 为第K 位的进位产生,P K 为第K 为的进位传播。
且:K K KK K KG A B P A B ==⊕ A K ,B K 为输入加数的第K 位。
将Co 和S 用G,P 重写为: O ii C G PC S P C =+=⊕由于低位的输出进位是高位的输入进位,所以有上面的(11.15)式源程序://this is a carry lookahead of 4bitmodule clad(ina,inb,ci,co,sum);input[3:0] ina,inb;input ci;output co;output[3:0]sum;wire co0,co1,co2,G0,G1,G2,G3,P0,P1,P2,P3;assignG0=ina[0]&inb[0],P0=ina[0]^inb[0],G1=ina[1]&inb[1],P1=ina[1]^inb[1],G2=ina[2]&inb[2],P2=ina[2]^inb[2],G3=ina[3]&inb[3],P3=ina[3]^inb[3],co0=G0|(P0&ci),co1=G1|(P1&co0),co2=G2|(P2&co1),co=G3|(P3&co2),sum[0]=P0^ci,sum[1]=P1^co0,sum[2]=P2^co1,sum[3]=P3^co2;endmodule测试程序:module clad_test;reg[3:0] ina,inb;reg ci;wire co;wire[3:0]sum;clad CI(.ina(ina),.inb(inb),.ci(ci),.co(co),.sum(sum)); initialbeginina=0;inb=0;ci=0;endalways #5 ina=ina+1'b1;always #80 inb=inb+1'b1;always #1280 ci=~ci;endmodule仿真结果:注:该结果为10进制显示练练手:参考《数字集成电路》(周润德第二版)420-421,设计一个16位的超前进位加法器,基本单元使用4位的加法器,结构自选。
超前进位加法器的设计分解
超前进位加法器的设计分解沈阳航空航天大学课程设计报告课程设计名称:计算机组成原理课程设计课程设计题目:超前进位加法器的设计院(系):计算机学院专业:计算机科学与技术班级:学号:姓名:指导教师:完成日期:2014年01月10日第2章详细设计方案2.1 顶层方案图的设计与实现顶层方案图主要实现一位全加器的逻辑功能,采用原理图设计输入方式完成,超前进位加法器电路的是实现基于XCV200可编程逻辑芯片。
在完成原理图的功能设计后,经过检测调试,把输入/输出信号通过引脚编号安排到XCV200指定的引脚上去,最终实现芯片的引脚锁定。
2.1.1顶层方案的整体设计顶层图形文件主要由2个四位超前进位加法器构成,总共17位输入,9位输出。
顶层图形文件由Xilinx Foundation F3.1软件编辑得到相应的模块,顶层图形的整体设计如下图2.1所示:图 2.1八位超前进位加法器整体设计图2.1.2元器件选择和引脚锁定(1)元器件的选择由于在设计的过程中,硬件设计环境是基于伟福COP2000型计算机组成原理实验仪和XCV200实验板,故采用的目标芯片为Xilinx XCV200可编程逻辑芯片。
(2)引脚锁定在Xilinx Foundation F3.1上面完成软件的设计之后,把顶层图形文件中的输入/输出信号用引脚编号安排到Xilinx XCV200芯片指定的引脚上去,从而实现芯片的设计电路的引脚锁定,各信号及Xilinx XCV200芯片引脚对应关系如下表2.1所示:表 2.1 信号和芯片引脚对应关2.2 功能模块的设计与实现在八位超前进位加法器和四位超前进位加法器的设计中均是采用Schematic 设计输入方式,而在四位超前进位加法器的设计中是由一列的门电路构成,最后在由2个四位超前进位加法器模块构成8位超前进位加法器。
可以扩展开来,16位,32位超前进位加法器原理类似8位的设计原理。
2.2.1 八位超前进位加法器的设计与实现(1)设计描述根据上面在1.1中讲述的四位超前进位加法器的设计原理那样,四位超前进位加法器的实现是建立在进位C1,C2,C3,C4的基础之上的。
16位超前进位加法器

16位超前进位加法器设计目录摘要 (1)1需求分析1.1加法器的发展........................................................................ 错误!未定义书签。
1.2几种串行加法器性能比较 (3)1.2.1串行进位加法器 (3)1.2.1超前进位加法器 (3)2主要内容 (4)2.1设计原理 (6)2.2设计思路 (4)3 设计思想 (5)4 实现方法 (6)4.1顶层方案图的设计与实现 (6).4.1.1顶层方案的整体设计 (6)4.1.2元器件选择和引脚锁定 (7)4.2功能模块的设计与实现 (8)4.2.1设计描述 (8)4.2.2创建RTL代码并得到电路图....................................................... .94.3功能仿真 (11)4.4编程与下载 (12)4.5硬件仿真结果 (12)5小结 (13)参考文献 (13)附录 (14)摘要:加法运算是最重要最基本的运算,所有的其他基本算术运算乘除等都最终可以用加法运算来表示在不同的场合对加法器的要求不同,要的要求速度快有的要求面积小超前进位加法器相比于串行进位加法器是一种快速加法运算器,根据用户的要求追求速度与面积的平衡。
关键词:超前进位加法器串行进位加法器速度面积1需求分析1.1 加法器的发展加法运算是最基本的运算,所有其他基本算术运算都是以加法运算为基础。
但因为加法运算存在进位问题,使得某一位计算结果的得出和所有低于他的位相关,因此,为了减少进位传输所耗的时间提高计算速度人们设计了多种类型的加法器。
如跳跃进位加法器,进位选择加法器,超前进位加法器等他们都是利用各位之间的状态来预先产生高位进位信号从而减少进位从低位到高位的传递时间1.2 几种加法器的性能比较1.2.1串行进位加法器串行进位加法器的每一位加和值都依赖于上一位进位信号,即进位信号是串行的经过加法器的每一位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
沈阳航空航天大学课程设计报告课程设计名称:计算机组成原理课程设计课程设计题目:超前进位加法器的设计院(系):计算机学院专业:计算机科学与技术班级:学号:姓名:指导教师:完成日期:2014年01月10日沈阳航空航天大学课程设计报告目录第1章总体设计方案 (2)1.1设计原理 (2)1.2设计思路 (3)1.3设计环境 (3)第2章详细设计方案 (4)2.1顶层方案图的设计与实现 (4)2.1.1顶层方案的整体设计 (4)2.1.2元器件选择和引脚锁定 (5)2.2功能模块的设计与实现 (6)2.2.1 八位超前进位加法器的设计与实现 (6)2.3功能仿真调试 (8)第3章编程下载与硬件测试 (10)3.1编程下载 (10)3.2硬件测试及结果分析 (10)参考文献 (12)附录 (13)第1章总体设计方案1.1 设计原理将n个全加器相连可得n位加法器,但是加法时间较长。
解决的方法之一是采用“超前进位产生电路”来同时形成各位进位,从而实现快速加法。
超前进位产生电路是根据各位进位的形成条件来实现的。
四位超前进位加法器的设计:①只要满足下述两个条件中的任一个,就可形成C1,(1)X1,Y1均为1;(2)X1,Y1任一个为1,且进位C0为1。
由此,可以得到C1的表达式为:C1=X1*Y1+(X1+Y1)*C0;②只要满足下述条件中任一个即可形成C2,(1)X2,Y2均为1;(2)X2,Y2任一为1,且X1,Y1均为1;(3)X2,Y2任一为1,同时X1,Y1任一为1,且C0为1。
由此,可以得到C2的表达式为:C2=X2*Y2+(X2+Y2)*X1*Y1+(X2+Y2)*(X1+Y1)*C0;③同理,有C3,C4表达式如下:C3=X3*Y3+(X3+Y3)*X2*Y2+(X3+Y3)*(X2+Y2)*X1*Y1+(X3+Y3)*(X2+Y2)*(X1+Y1)*C0;C4=X4*Y4+(X4+Y4)*X3*Y3+(X4+Y4)*(X3+Y3)*X2*Y2+(X4+Y4)*(X3+Y3)*(X2+Y2)*X1*Y1+(X4+Y4)*(X3+Y3)*(X2+Y2)*(X1+Y1)*C0。
引入进位传递函数Pi和进位产生函数Gi。
它们的定义为:Pi=Xi+YiGi=Xi*YiP1的意义是:当X1,Y1中有一个为1时,若有进位输入,则本位向高位传送此进位,这个进位可以看成是低位进位越过本位直接向高位传递的。
G1的意义是:当X1,Y1均为1时,不管有无进位输入,本位定会产生向高位的进位。
将Pi、Gi代入C1到C4式子中,便可得到:C1=G1+P1*C0;式(1.1.1)C2=G2+P2*G1+P2*P1*C0;式(1.1.2)C3=G3+P3*G2+P3*P2*G1+P3*P2*P1*C0;式(1.1.3)C4=G4+P4*G3+P4*P3*G2+P4*P3*P2*G1+P4*P3*P2*P1*C0;式(1.1.4)1.2 设计思路八位超前进位加法器的设计:一个八位超前进位加法器,它可以由2个四位超前进位加法器模块来构成。
四位超前进位加法器采用Schematic设计输入方式,顶层的八位超前进位加法器采用原理图设计输入方式。
在四位超前进位加法器的设计中,运用门电路进行控制,并且给上述设计进行定位,所设计的Schematic程序电路经过编译、检测、调试过后生成.bit文件并且下载到XCV200可编程逻辑芯片中,经过COP2000测试并验证设计的正确性。
1.3设计环境在设计超前进位加法器过程中,采用Xilinx Foundation F3.1可编程器件开发软件,对于硬件,在实验设计过程中,用到了伟福COP2000型计算机组成原理实验仪、XCV200实验板、微机。
第2章详细设计方案2.1 顶层方案图的设计与实现顶层方案图主要实现一位全加器的逻辑功能,采用原理图设计输入方式完成,超前进位加法器电路的是实现基于XCV200可编程逻辑芯片。
在完成原理图的功能设计后,经过检测调试,把输入/输出信号通过引脚编号安排到XCV200指定的引脚上去,最终实现芯片的引脚锁定。
2.1.1顶层方案的整体设计顶层图形文件主要由2个四位超前进位加法器构成,总共17位输入,9位输出。
顶层图形文件由Xilinx Foundation F3.1软件编辑得到相应的模块,顶层图形的整体设计如下图2.1所示:图 2.1八位超前进位加法器整体设计图2.1.2元器件选择和引脚锁定(1)元器件的选择由于在设计的过程中,硬件设计环境是基于伟福COP2000型计算机组成原理实验仪和XCV200实验板,故采用的目标芯片为Xilinx XCV200可编程逻辑芯片。
(2)引脚锁定在Xilinx Foundation F3.1上面完成软件的设计之后,把顶层图形文件中的输入/输出信号用引脚编号安排到Xilinx XCV200芯片指定的引脚上去,从而实现芯片的设计电路的引脚锁定,各信号及Xilinx XCV200芯片引脚对应关系如下表2.1所示:表 2.1 信号和芯片引脚对应关输入信号XCV200芯片引脚输出信号XCV200芯片引脚U1 A1 94 U1 S1 147U1 A2 95 U1 S2 152U1 A3 96 U1 S3 178U1 A4 97 U1 S4 184U2 A1 100 U2 S1 185U2 A2 101 U2 S2 203U2 A3 102 U2 S3 111U2 A4 103 U2 S4 110U1 B1 79 U2 C4 78U1 B2 80U1 B3 81U1 B4 82U2 B1 84U2 B2 85U2 B3 86U2 B4 87U1 C0 632.2 功能模块的设计与实现在八位超前进位加法器和四位超前进位加法器的设计中均是采用Schematic 设计输入方式,而在四位超前进位加法器的设计中是由一列的门电路构成,最后在由2个四位超前进位加法器模块构成8位超前进位加法器。
可以扩展开来,16位,32位超前进位加法器原理类似8位的设计原理。
2.2.1 八位超前进位加法器的设计与实现(1)设计描述根据上面在1.1中讲述的四位超前进位加法器的设计原理那样,四位超前进位加法器的实现是建立在进位C1,C2,C3,C4的基础之上的。
所以,由于上面第1.1节中关于进位C1,C2,C3,C4已经进位讲述,根据式(1.1.1),式(1.1.2),式(1.1.3)式(1.1.4)可以画出四位超前进位加法器的逻辑图。
四位超前进位加法器的9个输入端分别为:A1,A2,A3,A4,B1,B2,B3,B4,C0;5个输出端分别为:S1,S2,S3,S4,C4;其高低位顺序是从低到高,A1到A4,B1到B4,S1到S4,C0,C4是进位。
经过门电路的组合之后形成,四位超前进位加法器(Schematic程序),在经过封装,可以得到一个比较简洁的元器件,然后可以自己命名。
(2 )创建Schematic程序的电路图四位超前进位加法器的完整电路设计图如下图2.2所示:左面为输入端口,右面5个为输出端口。
图 2.2八位超前进位加法器的设计电路图如下图2.3所示:图2.32.3 功能仿真调试对所创建的电路图进行功能仿真,以便检测其正确性,可以采用Xilinx编译器中的Simulator模块实现。
如下图2.4所示:其中U1 C0为0,U1的A4A3A2A1为1111,B4B3B2B1为0000,U2的A4A3A2A1为1111,B4B3B2B1为0000,最后运算的结果为,U1的S4S3S2S1为1111,C4为0,U2的S4S3S2S1为1111,C4为0。
图 2.4仿真图说明:前面的9位依次是U1的C0,A1到A4,B1到B4,进位C4输出S1到S4,其余的是U2的输入输出,内容与U1相同。
为了验证其正确性,重新输入实验数据,再次进行检测。
如下图2.5所示:其中U1的A4A3A2A1为1111,B4B3B2B1为0001,C0为0,计算结果S4S3S2S1为0000,C4为1;U2的A4A3A2A1为1111,B4B3B2B1为0000,计算结果S4S3S2S1为0000,C4为1.图 2.5经过以上这两次的检测,对于所设计的八位超前进位加法器电路图是完全正确的,计算结果是正确的,符合设计要求。
第3章编程下载与硬件测试3.1 编程下载在设计完程序电路,经过检测没有错误之后,就可以利用COP2000仿真软件的编程下载功能,将得到111.bit文件下载到XCV200实验板的XCV200可编程逻辑芯片中。
如果不能正确下载,需要重新连接电路图,然后重新进行检测,知道能够下载为止。
3.2 硬件测试及结果分析利用XCV200实验板进行硬件功能测试。
八位超前进位加法器的输入数据通过XCV200实验板的输入开关实现,输出数据通过XCV200实验板的LED指示灯实现,其对应关系如表3.1所示。
表3.1 XCV200实验板信号对应关系XCV200芯片引脚信号XCV200实验板A1~A4(U1) A1~A4(U2) K0B1~B4(U1) B1~B4(U2) K1C0(U1) K2:0S1~S4(U1) S1~S4(U2) A0~A7C4(U2) B0表3.1中的输入参数作为输入数据,逐个测试输出结果,即用XCV200实验板的开关控制相应的输入数据,同时观察红灯和绿灯的亮灭,如果灯亮,说明输出1,灯灭则输出0。
具体操作结果如下图3.1。
图3.1硬件测试说明:A加数输入11111100,B加数输入11000000,C0输入0,相加结果为110111100,即C4为1,输出结果为10111100,与上图3.1现象相符,结果正确。
参考文献[1] 李景华.可编程程逻辑器件与EDA技术[M].北京:东北大学出版社,2001[2] 范延滨.微型计算机系统原理、接口与EDA设计技术[M].北京:北京邮电大学出版社,2006[3] 王爱英.计算机组成与结构(第4版)[M].北京:清华大学出版社,2006[4] 王冠.Verilog HDL与数字电路设计[M].北京:机械工业出版社,2005[5] 江国强.EAD技术习题与实验[M].北京:电子工业出版社,2005[6] 杜建国.Verilog HDL硬件描述语言[M].北京:国防工业出版社,2004[7] 王爱英.计算机组成与结构[M].北京:清华大学出版社,2007[8] 唐朔飞.计算机组成原理[M]北京:高等教育出版社,2008附录八位超前进位加法器的完整设计图:四位超前进位加法器的设计电路图:四位超前进位加法器的内部设计电路图:课程设计总结:在这次的课程设计中,我学到了很多。
第一次用Xilinx Foundation F3.1,很多东西都不懂,不断地去请教同学,同时自己也不断地去尝试,总算是慢慢的知道了该如何去建工程,如何去定义一个新的芯片以及内部逻辑结构。