超前进位加法器设计报告
超前进位加法器
超前进位加法器超前进位加法器是一种重要的数电电路,广泛应用于计算机和其他电子设备中。
它的作用是在进行多位数相加时,实现进位的自动计算和传递,从而提高计算速度和准确性。
本文将对超前进位加法器进行详细介绍。
超前进位加法器是一种基于逻辑门电路的加法器。
它的设计理念是通过预先检测进位,减少进位的传输延迟,从而加快计算速度。
对于一位加法器来说,传统的进位加法器需要等待当前位的进位计算完成后,才能进行下一位的计算。
而超前进位加法器在当前位计算的同时,预先计算下一位的进位,从而节省了计算时间。
超前进位加法器的基本原理是利用逻辑门的延迟特性实现进位的预先计算。
常见的超前进位加法器包括Ripple Carry Adder(RCA)、Carry Select Adder(CSA)和Carry Lookahead Adder(CLA)。
这些加法器在实现进位预先计算的方式上有所不同,但核心思想都是一样的。
以Ripple Carry Adder为例,它由多个全加器级联而成。
全加器是一种可以同时实现两位相加和进位计算的电路。
Ripple Carry Adder通过将多个全加器级联,实现了对多位数相加的计算。
在每个全加器中,除了计算两位之和外,还需要计算当前位的进位。
传统的Ripple Carry Adder需要等待前一位的进位计算完成后,才能进行下一位的计算,而这就导致了较长的计算时间。
而超前进位加法器则在每个全加器中预先计算下一位的进位。
通过利用逻辑门的传输延迟,将当前位的进位信号传递到下一位,实现了进位的预先计算。
这样,在当前位的计算完成后,下一位的进位已经预先计算好了,从而减少了计算时间。
超前进位加法器在计算速度上有显著的优势。
相比传统的进位加法器,它能够减少计算时间,提高计算效率。
对于大规模的数值计算,超前进位加法器能够显著缩短计算时间,提高计算速度。
这对于例如计算机科学、数据处理和通信等领域的应用非常重要。
除了计算速度的优势,超前进位加法器在准确性上也有一定的优势。
设计一个 4 位超前进位加法器(数字逻辑课设)
c[2]=(p[2]&p[1]&p[0]&ci)|(p[2]&p[1]&g[0])|(p[2]&g[1])|g[2],
c[3]=(p[3]&p[2]&p[1]&p[0]&ci)|(p[3]&p[2]&p[1]&g[0])|(p[3]&p[2]&g[1])|(p[3]&g[2])|g[3];
代码如下: add.v
`timescale 1ns/1ps
module add(input [3:0]a,input [3:0]b,input ci,output [3:0]s,output co); //定义所需变量
wire [3:0] p, g; //进位传递函数p,进位产生函数g
wire [3:0] c; //进位函数
设计要求:在这个设计中,你需要使用 Verilog 代码设计一个 4 位的超前进位加法器。这个 4 位超前进位加法器可以完成对两个 4 位二进制数的相加。完成设计后,你还需要设计测试程序(test bench)来验证你的设计。你的测试程序需要考虑到所有可能的输入情况。
设计思路:
因为各进位的产生依赖于低位的进位,所以运算速度较慢。为了提高速度,必须设法使较低位的进位信号越过中间各级直接决定较高位的进位输出,设计Ai和Bi分别表示第i位的被加数和加 数,Ci-1为来自第i-1位全加器的进位,令Pi=Ai^Bi,Gi=Ai&Bi函数表达式为:
Co=PoCo+Go
C1=P1Co+G1
C2=p2C1+G2
超前进位加法器
超前进位加法器超前进位加法器是一种数字电路,用于执行两个二进制数的加法运算。
它具有高速、高效的特点,在计算机领域得到广泛的应用。
超前进位加法器的原理和实现方法值得深入研究和探讨。
本文将详细介绍超前进位加法器的原理、设计和性能优化等方面内容。
1. 引言在计算机科学和工程领域,加法运算是一项基本的操作。
随着计算机性能的要求不断提高,如何在更短的时间内完成加法运算成为了重要的研究方向。
超前进位加法器是一种对加法运算进行优化的方法,可以极大地提高运算速度和效率。
2. 超前进位加法器原理超前进位加法器是一种并行加法器,它利用了信号传输的延迟问题,通过将进位信号从低位传递到高位,实现了高速的运算。
其基本原理是,将两个二进制数按位相加,如果某一位的和等于2,就会产生一个进位信号,进位信号会传递到下一位,直到最高位。
3. 超前进位加法器的设计超前进位加法器的设计分为四个部分:1) 带有进位预测的半加器;2) 带有进位预测的全加器;3) 进位生成和进位传递逻辑电路;4) 加法器的结构和电路实现。
3.1 带有进位预测的半加器半加器是最基本的加法器,可以完成两个二进制位的加法运算,但不能处理进位信号。
为了实现进位预测,我们需要对半加器进行改进。
一种常见的方法是使用XOR门和AND门来实现进位预测功能。
具体的电路设计和逻辑表达式请查阅相关资料。
3.2 带有进位预测的全加器全加器是进一步改进的半加器,可以处理进位信号。
在超前进位加法器的设计中,我们使用带有进位预测的全加器。
全加器的设计和实现方法与半加器类似,但需要增加一个输入端来接收上一位的进位信号,并根据进位预测电路来生成进位信号。
3.3 进位生成和进位传递逻辑电路进位生成和进位传递逻辑电路是超前进位加法器的核心部分。
它们用于计算每一位的进位信号和传递进位信号到下一位。
进位生成电路可以通过AND门实现,进位传递电路可以通过OR 门实现。
具体的电路设计和实现方法请参考相关资料。
试验二 超前进位加法器 设计
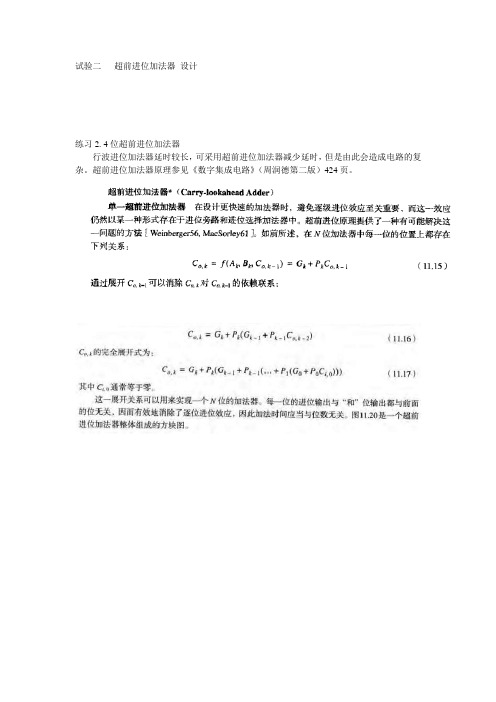
试验二超前进位加法器设计练习2. 4位超前进位加法器行波进位加法器延时较长,可采用超前进位加法器减少延时,但是由此会造成电路的复杂。
超前进位加法器原理参见《数字集成电路》(周润德第二版)424页。
对以上公式的注解:公式中的C O,K 表示第K 为的进位输出,G K 为第K 位的进位产生,P K 为第K 为的进位传播。
且:K K KK K KG A B P A B ==⊕ A K ,B K 为输入加数的第K 位。
将Co 和S 用G,P 重写为: O ii C G PC S P C =+=⊕由于低位的输出进位是高位的输入进位,所以有上面的(11.15)式源程序://this is a carry lookahead of 4bitmodule clad(ina,inb,ci,co,sum);input[3:0] ina,inb;input ci;output co;output[3:0]sum;wire co0,co1,co2,G0,G1,G2,G3,P0,P1,P2,P3;assignG0=ina[0]&inb[0],P0=ina[0]^inb[0],G1=ina[1]&inb[1],P1=ina[1]^inb[1],G2=ina[2]&inb[2],P2=ina[2]^inb[2],G3=ina[3]&inb[3],P3=ina[3]^inb[3],co0=G0|(P0&ci),co1=G1|(P1&co0),co2=G2|(P2&co1),co=G3|(P3&co2),sum[0]=P0^ci,sum[1]=P1^co0,sum[2]=P2^co1,sum[3]=P3^co2;endmodule测试程序:module clad_test;reg[3:0] ina,inb;reg ci;wire co;wire[3:0]sum;clad CI(.ina(ina),.inb(inb),.ci(ci),.co(co),.sum(sum)); initialbeginina=0;inb=0;ci=0;endalways #5 ina=ina+1'b1;always #80 inb=inb+1'b1;always #1280 ci=~ci;endmodule仿真结果:注:该结果为10进制显示练练手:参考《数字集成电路》(周润德第二版)420-421,设计一个16位的超前进位加法器,基本单元使用4位的加法器,结构自选。
超前进位加法器的设计分解
超前进位加法器的设计分解沈阳航空航天大学课程设计报告课程设计名称:计算机组成原理课程设计课程设计题目:超前进位加法器的设计院(系):计算机学院专业:计算机科学与技术班级:学号:姓名:指导教师:完成日期:2014年01月10日第2章详细设计方案2.1 顶层方案图的设计与实现顶层方案图主要实现一位全加器的逻辑功能,采用原理图设计输入方式完成,超前进位加法器电路的是实现基于XCV200可编程逻辑芯片。
在完成原理图的功能设计后,经过检测调试,把输入/输出信号通过引脚编号安排到XCV200指定的引脚上去,最终实现芯片的引脚锁定。
2.1.1顶层方案的整体设计顶层图形文件主要由2个四位超前进位加法器构成,总共17位输入,9位输出。
顶层图形文件由Xilinx Foundation F3.1软件编辑得到相应的模块,顶层图形的整体设计如下图2.1所示:图 2.1八位超前进位加法器整体设计图2.1.2元器件选择和引脚锁定(1)元器件的选择由于在设计的过程中,硬件设计环境是基于伟福COP2000型计算机组成原理实验仪和XCV200实验板,故采用的目标芯片为Xilinx XCV200可编程逻辑芯片。
(2)引脚锁定在Xilinx Foundation F3.1上面完成软件的设计之后,把顶层图形文件中的输入/输出信号用引脚编号安排到Xilinx XCV200芯片指定的引脚上去,从而实现芯片的设计电路的引脚锁定,各信号及Xilinx XCV200芯片引脚对应关系如下表2.1所示:表 2.1 信号和芯片引脚对应关2.2 功能模块的设计与实现在八位超前进位加法器和四位超前进位加法器的设计中均是采用Schematic 设计输入方式,而在四位超前进位加法器的设计中是由一列的门电路构成,最后在由2个四位超前进位加法器模块构成8位超前进位加法器。
可以扩展开来,16位,32位超前进位加法器原理类似8位的设计原理。
2.2.1 八位超前进位加法器的设计与实现(1)设计描述根据上面在1.1中讲述的四位超前进位加法器的设计原理那样,四位超前进位加法器的实现是建立在进位C1,C2,C3,C4的基础之上的。
数字集成电路课程设计报告-4bits超前进位加法器
数字集成电路课程设计报告-4bits超前进位加法器福州⼤学⾄诚学院数字集成电路课程设计报告设计题⽬:4bits 超前进位加法器班级:专业:姓名:学号:组名:指导⽼师:教师评分:⽇期:4bits超前进位加法器⽬录第1章概述.................................................................... - 3 -1.1课程设计⽬的 (3)1.2课程设计的主要内容 (3)1.2.1设计题⽬ (3)1.2.2设计内容 (3)第2章功能分析及逻辑分析...................................................... - 3 -2.1功能分析 (3)2.2推荐⼯作条件 (4)2.3电性能 (4)2.4交流(开关)特性 (5)2.5真值表 (6)2.6表达式 (6)2.7电路图 (7)第3章电路设计及器件参数设计.................................................. - 7 -3.1性能指标: (7)3.2模块划分 (7)3.2.1输出级电路设计 (7)3.2.2内部反相器 (8)3.2.3内部电路等效 (8)3.2.4输⼊级电路 (9)3.2.5中间缓冲级电路 (9)3.2.6输出缓冲级电路 (9)3.2.7输⼊、输出保护电路 (10)3.3本章⼩结 (10)第4章功耗估算与延时......................................................... - 10 -4.1电容估算 (10)4.2功耗估算 (11)4.3延时估算 (11)4.4本章⼩结 (12)第5章电路模拟与仿真......................................................... - 12 -5.1电路搭建 (12)5.1.1建⽴新库 (12)5.1.2建⽴SCHEMATIC VIEW (13)5.1.3建⽴SYMBOL (13)5.1.4建⽴总体电路SCHEMATIC VIEW (13)数字集成电路课程设计5.1.5建⽴总体SYMBOL (14)5.1.6测试电路 (14)5.2功能仿真 (15)5.3功耗仿真 (15)5.4仿真结果分析 (16)5.5本章⼩结 (16)第6章版图设计............................................................... - 16 -6.1原理 (16)6.2反相器版图 (17)6.2.1 LAYOUT VIEW的建⽴ (17)6.2.2添加器件 (18)6.2.3互连,实现反相器功能 (18)6.3输⼊级 (19)6.4输出级 (19)6.5输出缓冲 (19)6.6异或门 (20)6.7或⾮门 (20)6.8与门 (20)6.9整体版图 (21)6.10本章⼩结 (21)总体⼼得....................................................................... - 22 -对课程内容的建议................................................... 错误!未定义书签。
数字电路课程设计之超前进位加法器
reg
Cin;
wire[3:0] S;
wire
Cout;
carry_look_add CAL (.A(A),.B(B),.Cin(Cin),.Cout(Cout),.S(S)); initial begin
#10 A=4'd0;B=4'd0;Cin=0; #10 A=4'd11;B=4'd1;Cin=0; #10 A=4'd10;B=4'd12;Cin=0; #10 A=4'd11;B=4'd4;Cin=0; #100 $stop; end endmodule
Pi=Ai○+ Bi;
可以得到输出与进位表达
Gi=AiBi;
Si=Pi○+ Ci;
Ci+1=Gi+PiCi; Gi 为进位产生,不管输入进位 Ci 为什么,只要 Ai 与 Bi 为 1 时,它将产生进位。Pi 称为进位传输,因为它 与从 Ci 到 Ci+1 的进位传输有关
C0 = 输入进位
C1 = G0 + P0C0
Half_Add H3(.a(A[2]),.b(B[2]),.s(v6),.c(v5));
Half_Add H4(.a(A[3]),.b(B[3]),.s(v8),.c(v7));
carry_look
CL1(.C0(Cin),.P0(v2),.G0(v1),.P1(v4),.G1(v3),.P2(v6),.G2(v5),.P3(v8),.G3(v7),.C1(o1),.C2(o2),.C3(o3),.C4(Cout));
注意 C4 并不需要等待 C3,实际上 C4,C3,C2,C1 同时传输 超前进位产生的电路逻辑图
超前进位加法器
8位超前进位加法器设计说明书超前进位加法器就是使各位的进位直接由加数和被加数来决定,而不需要依赖低位进位。
即有如下逻辑表达式:1)(-++=i i i i i i C B A B A C当第i 位被加数A i 和加数B i 均为1时,有1=i i B A ,不论低位运算结果如何本位必然有进位输出(1=i C ),所以定义i i i B A G =为进位产生函数。
当A i 和B i 中只有一个为1时,有0=i i B A ,1=+i i B A ,使得1-=i i C C ,所以定义i i i B A P +=为进位传递函数。
将P i 和G i 代入全加器的“和”及“进位”表达式有:1-⊕⊕=i i i i C B A Y从而构成超前进位加法器。
VHDL 示例程序如下:(本程序在MAXPLUSII V9.6上编译通过)--*****8位超前进位加法器*****LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE. STD_LOGIC _ARITH.ALL;USE IEEE. STD_LOGIC _UNSIGNED.ALL;ENTITY ADDER8BIT ISPORT(A, B: IN UNSIGNED(7 downto 0);CI,clk: IN STD_LOGIC;Y_OUT: OUT STD_LOGIC_VECTOR(7 downto 0);CO_OUT: OUT STD_LOGIC);END ADDER8BIT;ARCHITECTURE doing OF ADDER8BIT ISSIGNAL CO,Y: STD_LOGIC_VECTOR(7 downto 0);BEGINY(0)<=A(0) xor B(0) xor CI;CO(0)<=(A(0) and B(0)) or (B(0) and CI) or (A(0) and CI);GEN:for i in 1 to 7 GENERATEY(i)<=A(i) xor B(i) xor CO(i-1); --1-⊕⊕=i i i i C B A YCO(i)<=(CO(i-1) and A(i)) or (CO(i-1) and B(i)) or (A(i) and B(i)); -- 1)(-++=i i i i i i C B A B A Cend GENERATE;process(clk)beginif clk'event and clk='1' thenY_OUT<=Y(7) & Y(6) & Y(5) & Y(4) & Y(3) & Y(2) & Y(1) & Y(0);CO_OUT<=CO(7);end if;end process;END doing;附:仿真时序波形。
超前进位加法器设计(参考资料)
加法器设计(三)超前进位加法器(Verilog)超前进位加法器module add4_head ( a, b, ci, s, pp, gg);input[3:0] a;input[3:0] b;input ci;output[3:0] s;output pp;output gg;wire[3:0] p;wire[3:0] g;wire[2:0] c;assign p[0] = a[0] ^ b[0];assign p[1] = a[1] ^ b[1];assign p[2] = a[2] ^ b[2];assign p[3] = a[3] ^ b[3];assign g[0] = a[0] & b[0];assign g[1] = a[1] & b[1];assign g[2] = a[2] & b[2];assign g[3] = a[3] & b[3];assign c[0] = (p[0] & ci) | g[0];assign c[1] = (p[1] & c[0]) | g[1];assign c[2] = (p[2] & c[1]) | g[2];assign pp = p[3] & p[2] & p[1] & p[0];assign gg = g[3] | (p[3] & (g[2] | p[2] & (g[1] | p[1] & g[0])));assign s[0] = p[0] ^ ci;assign s[1] = p[1] ^ c[0];assign s[2] = p[2] ^ c[1];assign s[3] = p[3] ^ c[2];endmodule首先要明确几个概念:p表示进位否决信号(pass),如果p为0就否决调前一级的进位输入。
否决的意思就是即使前一级有进位,本级也不会向后一级产生进位输出。
超前进位加法器设计报告解剖
华东交通大学理工学院课程设计报告书所属课程名称EDA课程设计题目超前进位加法器设计分院专业班级学号学生姓名指导教师2013 年7月2日目录第一章设计内容与要求 (3)第二章超前进位加法器设计原理 (3)第三章详细设计流程 (4)3.1.创建工程文件 (4)3.2.程序的编译 (5)3.3.波形的仿真 (7)第四章设计结果分析 (11)第五章源程序代码 (12)第六章心得体会 (14)第七章参考文献 (15)第一章设计内容与要求加法运算是最重要也是最基本的运算,所有的其他基本运算,如减、乘、除运算最终都能归结为加法运算。
但因为加法运算存在进位问题,使得某一位计算结果的得出和所有低于他的位相关。
因此为了减少进位传输所消耗的时间,提高计算速度,人们设计了多种类型的加法器,如跳跃进位加法器、进位选择加法器、超前进位加法器等。
本设计采用的是超前进位加法器。
通过Verilog 设计一个超前8位加法器。
要求在Quartus II软件下,利用Verilog编程完成层次式电路设计,电路中的元件可以用Verilog设计也可以用库元件连线构成再封装。
8位超前进位加法器,借助EDA工具中的综合器,适配器,时序仿真器和编程器等工具进行相应处理。
适配采用Cyclone系列的EP1C6Q240C8。
要求综合出RTL电路,并进行仿真输入波形设计并分析电路输出波形. 试比较并阐述数据类型reg型和wire型的区别。
第二章超前进位加法器设计原理将n个全加器相连可得n位加法器,但是加法时间较长。
解决的方法之一是采用“超前进位产生电路”来同时形成各位进位,从而实现快速加法。
超前进位产生电路是根据各位进位的形成条件来实现的首先对于1位加法器基本位值和与进位输出为1;如果a,b有一个为1,则进位输出等于cin;令G=ab,P=a+b,则有:Cout==ab+(a+b)cin=G+P•cin由此可以G和P来写出4位超前进位链如下(设定四位被加数和加数为A 和B,进位输入Cin,进位输出为cout,进位产生Gi=AiBi,进位传输Pi=Ai+Bi);C0=cin;C1=G0+P0C0=G0+P0•cinC2=G1+P1C1=G1+P1(G0+P0cin)=G1+P1G0+P1P0cinC3=G2+P2C2=G2+P2(G1+P1cin)=G2+P2G1+P2P1G0+P2P1P0cinC4=G3+P3C3=G3+P3(G2+P2C2)=G3+P3G2+P3P2G1+P3P2P1G0+P3P2P1P0cin Cout=c4由超前进位链,各个进位彼此独立产生,将进位级联传播给去掉了,因此,减小了进位产生的延迟时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
华东交通大学理工学院课程设计报告书所属课程名称EDA课程设计题目超前进位加法器设计分院专业班级学号学生姓名指导教师2013 年7月2日目录第一章设计内容与要求 (3)第二章超前进位加法器设计原理 (3)第三章详细设计流程 (4)3.1.创建工程文件 (4)3.2.程序的编译 (5)3.3.波形的仿真 (7)第四章设计结果分析 (11)第五章源程序代码 (12)第六章心得体会 (14)第七章参考文献 (15)第一章设计内容与要求加法运算是最重要也是最基本的运算,所有的其他基本运算,如减、乘、除运算最终都能归结为加法运算。
但因为加法运算存在进位问题,使得某一位计算结果的得出和所有低于他的位相关。
因此为了减少进位传输所消耗的时间,提高计算速度,人们设计了多种类型的加法器,如跳跃进位加法器、进位选择加法器、超前进位加法器等。
本设计采用的是超前进位加法器。
通过Verilog 设计一个超前8位加法器。
要求在Quartus II软件下,利用Verilog编程完成层次式电路设计,电路中的元件可以用Verilog设计也可以用库元件连线构成再封装。
8位超前进位加法器,借助EDA工具中的综合器,适配器,时序仿真器和编程器等工具进行相应处理。
适配采用Cyclone系列的EP1C6Q240C8。
要求综合出RTL电路,并进行仿真输入波形设计并分析电路输出波形. 试比较并阐述数据类型reg型和wire型的区别。
第二章超前进位加法器设计原理将n个全加器相连可得n位加法器,但是加法时间较长。
解决的方法之一是采用“超前进位产生电路”来同时形成各位进位,从而实现快速加法。
超前进位产生电路是根据各位进位的形成条件来实现的首先对于1位加法器基本位值和与进位输出为1;如果a,b有一个为1,则进位输出等于cin;令G=ab,P=a+b,则有:Cout==ab+(a+b)cin=G+P•cin由此可以G和P来写出4位超前进位链如下(设定四位被加数和加数为A 和B,进位输入Cin,进位输出为cout,进位产生Gi=AiBi,进位传输Pi=Ai+Bi);C0=cin;C1=G0+P0C0=G0+P0•cinC2=G1+P1C1=G1+P1(G0+P0cin)=G1+P1G0+P1P0cinC3=G2+P2C2=G2+P2(G1+P1cin)=G2+P2G1+P2P1G0+P2P1P0cinC4=G3+P3C3=G3+P3(G2+P2C2)=G3+P3G2+P3P2G1+P3P2P1G0+P3P2P1P0cin Cout=c4由超前进位链,各个进位彼此独立产生,将进位级联传播给去掉了,因此,减小了进位产生的延迟时间。
同样可推导出下面的式子:SUM=A⊕B⊕Cin=(AB)⊕(A+B) ⊕CinU=G⊕P⊕Cin本实验中采用8位超前进位加法器第三章详细设计流程3.1.创建工程文件打开Quartus II 9.1创建一个工程文件adder_ahead选择菜单File中New Project Wizard命令,在如下“工程设置”对话框中单击右侧“…”按钮,找到文件夹D:\atlera\quartus,选中已存盘的add_ahead.vhd的文件。
单击Next,将与工程有关的文件加入此工程。
(1)选择仿真器和综合器类型。
都选默认的None。
(2)选择目标芯片。
(3)工具设置。
这里默认使用QuartusⅡ自含的所有设计工具。
(4)结束设置。
3.2.程序的编译(1).选择菜单“Processing”—“Start Compilation”命令,或者点击运行编译按钮,启动完全编译,这里的完全编译包括分析与综合、适配、装配文件、定时分析、网编文件提取过程。
如果只要进行期中的某一项编译,可以选着“Tools”---“Compiler Tool”命令,或者点击按钮即可出现编译工具选择串口,共包括5个编译工具,分别为分析与综合器、适配器、装配器、定时分析器、网表文件提提取器,单机每个工具前面的小图标可单独启动每一个编译器。
(2)编译完成后,会将有关的编译信息显示在窗口中,可查看其中的相关内容。
还可以查看中和后的电路原理图,选择“Tools”---“Netlist Viewers”---“RTL Viewer”菜单命令,既可观察综合生成的RLT方式的电路原理图,在这里我们可以看到8位超期进位加法器生成的原理图如下:8位超期进位加法器生成的原理图:3.3.波形的仿真仿真时序,对项目进行仿真测试,也可以对项目中的某一个子模块进行仿真,其方法是选择菜单“Assignment”---“Wizard”----“Simulator Set Wizard”命令,在设置过程中指定仿真对象,并指定对象的仿真类型、矢量激励源等。
(1)打开波形编辑器选择菜单“File”---“New”命令,在“New”对话框中选择“Other File”页中的“Vector Wave File”选项,单击“ok”按钮,即出现选择波形按钮;(2)输入信号节点选择菜单“View”---“Utility Windows”---“Node Finder”命令,出现对话框,在“Filter”下拉列表中选择“Pins:all”选项,再次单击“List”按钮,即在下面的“Nodes Found”框中出现本设计项目的所有端口引脚列表,从端口列表中选择所需要的,并逐个拖到波形编辑窗口中(4)编辑输入信号波形点击波形编辑窗口中的全屏显示,使用波形编辑窗口中的各种波形赋值,编辑各输入信号的激励波形。
在仿真的时候需要设置一个合理的区域,选择菜单“Edit”---“End Time”命令,在淡出的“Time”窗口中输入60us.对数据的型号的格式可以选择:Binary(二进制),Hexadecimal(十六进制)、Octal(八进制)、Signed Decimal(有符号十进制),Unsgned Decimal(无符号十进制)。
这里选择的是Binary二进制,便于观察结果。
(5)仿真参数的设置,选择菜单“Assignments”—“Setting”命令,在弹出的对话框选择“Simulator Setting”项下的“Mode”,以选择仿真模式,仿真模式有功能仿真模式和时序仿真模式,这里选择功能仿真。
(6)观察仿真结果选择菜单“Processing”---“Start Simulation”命令,即启动仿真器工作。
仿真完毕后,可以通过输出波形,检验所设计电路的功能是否正确。
8位超前进位的功能输出波形图:第四章设计结果分析输入a 00100110 00100111输入b 001010110 01010111cin 0 1 0 1 sum 01101000 01101001 01101010 01101011 结果中显示是正常的,8位超前进位加法器得到成功的实现8位超前进位器综合后的RTL级原理图第五章源程序代码8位超前进位加法器module add_ahead(sum,cout,a,b,cin);input[7:0] a,b;input cin;output[7:0] sum;output cout;wire[7:0] G,P;wire[7:0 ] C,sum;assign G[0]=a[0]&b[0];assign P[0]=a[0]|b[0];assign C[0]=cin;assign sum[0]=G[0]^P[0]^C[0];assign G[1]=a[1]&b[1];assign P[1]=a[1]|b[1];assign C[1]=G[0]|(P[0]&cin);assign sum[1]= G[1]^P[1]^C[1];assign P[2]=a[2]&b[2];assign C[2]=G[1]|(P[1]&C[1]);assign sum[2]=G[2]^P[2]^C[2];assign G[3]=a[3]&b[3];assign P[3]=a[3]|b[3];assign C[3]=G[2]|(P[2]&C[2]);assign sum[3]=G[3]^P[3]^C[3];assign G[4]=a[4]&b[4]; assign P[4]=a[4]|b[4];assign C[4]=G[3]|(P[3]&C[3]); assign sum[4]=G[2]^P[2]^C[2]; assign G[5]=a[5]&b[5]; assign P[5]=a[5]|b[5];assign C[5]=G[4]|(P[4]&C[4]); assign sum[5]=G[5]^P[5]^C[5]; assign G[6]=a[6]&b[6]; assign P[6]=a[6]|b[6];assign C[6]=G[5]|(P[5]&C[5]); assign sum[6]=G[6]^P[6]^C[6]; assign G[7]=a[7]&b[7]; assign P[7]=a[7]|b[7];assign C[7]=G[6]|(P[6]&C[6]); assign sum[7]=G[7]^P[7]^C[7]; assign cout=G[7]|(P[7]&C[7]); endmodule第六章心得体会本学期学习了EDA技术与Vertlog技术,对EDA技术应用有了一些了解,在如今生活在这个数字化和信息化时代,数字产品的广泛应用越来越多。
EDA技术的使用在我们生活中息息相关,发现了EDA的强大功能。
系统系设计,混合电路设计,综合仿真的设计,数字电路设计,版图设计,PCB 板设计,PLD开发,高速电路设计,模拟电路设计等应用。
这次课设中用到的Quartus Ⅱ软件,在安装过程中遇到不能仿真,后来下载了9.11版本得到解决。
Quartus Ⅱ进行EDA开发包括设计输入,编译,仿真,编程和验证,自己通过设计8位超前加法器对Quartus Ⅱ软件的应用也得到了一定的掌握。
在编译的过程中遇到一些不能编译,通过网上找资料,和同学的讨论得到了一定的了解,通过软件的设置和通过编译错误的提示来更改错误,对设计的原理有了更深的理解。
同时也发现遇到问题不要急着马上就向同学寻求帮助,我们自己可以认真地独立思考,想想问题哪里出错了,这样自己才会有不断地提高。
认识涞源于实践实践是用于检验真理的唯一标准。
这次使用超前进位这样就减少了延时,加快了运行速度。
对于一切的设计我们都要多思考,使用最优的方法到我们实际生活当中去。
这次课设设计,加强了我们自己动手,思考解决问题的能力。
也让我们在学习的道路求知的一段探索道路,是对于我们生活一种充实。